") 新能源汽車(chē)的大腦——VCU核心功能介紹(下)
新能源汽車(chē)的大腦——VCU核心功能介紹(下)
上篇介紹了VCU系統(tǒng)功能概覽,也從車(chē)輛驅(qū)動(dòng)控制方面介紹了“模式管理”,“扭矩管理”和“四驅(qū)控制”等幾塊主要系統(tǒng)功能。本文將繼續(xù)從“電力系統(tǒng)”,“熱管理”和“低溫駕駛性改善策略”等方面,介紹VCU中提高車(chē)輛運(yùn)行的安全性和舒適性的幾塊功能。
VCU軟件核心功能介紹(下)
支持 Reset后可自動(dòng)恢復(fù)行駛狀態(tài)的電管理功能
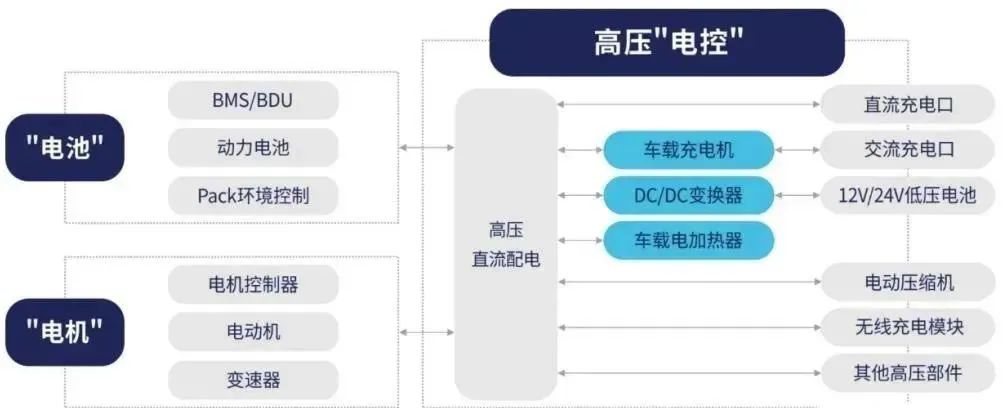
如上文中提到VCU協(xié)調(diào)的部件很多,其中很多是高壓電力部件。因此VCU主要的工作之一是負(fù)責(zé)高低/壓電力系統(tǒng)的控制。包括:高壓上/下電協(xié)調(diào)、高壓功率分配和限制、高壓部件信息處理(包含D/R擋切換時(shí)的電機(jī)四象限映射),以及部件的診斷和保護(hù)功能。電力系統(tǒng)的穩(wěn)定性和安全性很大程度的決定了整車(chē)的運(yùn)行狀況。
對(duì)于電子控制器來(lái)說(shuō),在整個(gè)生命周期內(nèi)很難避免完全不發(fā)生復(fù)位,比如VCU自身內(nèi)部導(dǎo)致的硬件復(fù)位、軟件復(fù)位,以及外部干擾導(dǎo)致的復(fù)位等。雖然復(fù)位時(shí)間很短(比如軟件復(fù)位,發(fā)生復(fù)位到恢復(fù)通訊大概不到0.2s),但如果在有些場(chǎng)景(如高速行駛時(shí))復(fù)位后不能盡快自動(dòng)恢復(fù)之前的狀態(tài),則車(chē)輛會(huì)失去動(dòng)力,進(jìn)而可能會(huì)給駕駛員帶來(lái)非常大的安全隱患。
特別是對(duì)于整車(chē)控制器VCU,很多動(dòng)力相關(guān)的部件都受其控制。并且在正常情況下,如果要進(jìn)入行車(chē)就緒狀態(tài),一般需要至少兩個(gè)不同的操作(如踩剎車(chē)、按啟動(dòng)按鈕、換擋等);而一旦在高速工況下出現(xiàn)了控制器復(fù)位,很多復(fù)位前儲(chǔ)存的信號(hào)會(huì)被初始化,此時(shí)如果仍需要駕駛員兩個(gè)連續(xù)不同操作,則可能出現(xiàn)非期望的減速,甚至造成追尾事故。
為此,聯(lián)合電子開(kāi)發(fā)了一種新能源整車(chē)控制器軟件復(fù)位后動(dòng)力自動(dòng)恢復(fù)的控制功能(圖1),該功能通過(guò)識(shí)別到控制器發(fā)生了軟件復(fù)位,然后根據(jù)復(fù)位后車(chē)輛的狀態(tài),決定是否需要恢復(fù)車(chē)輛復(fù)位前的狀態(tài),實(shí)現(xiàn)在盡可能保證安全的前提下,自動(dòng)恢復(fù)到復(fù)位前的狀態(tài)。
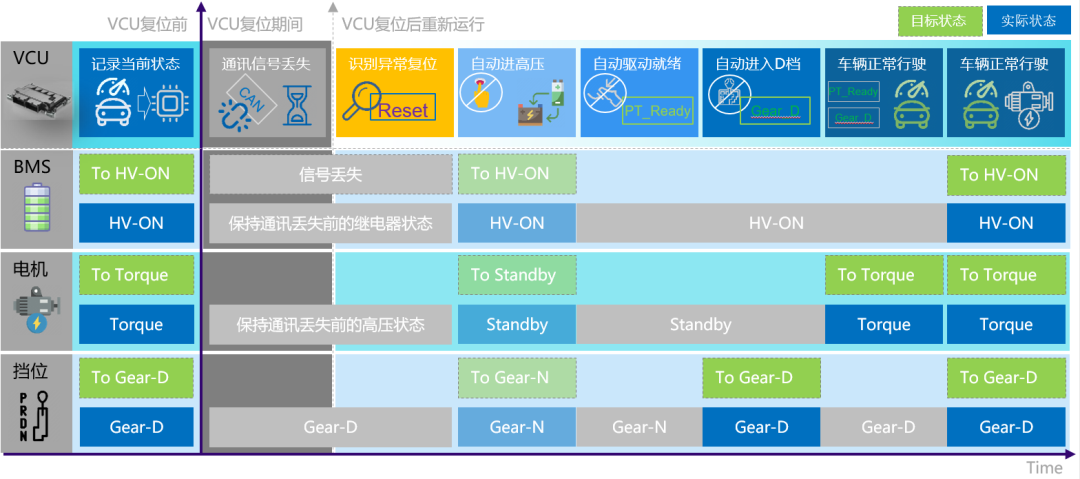
圖1 VCU 復(fù)位后自動(dòng)恢復(fù)可行駛狀態(tài)
上述方案經(jīng)過(guò)實(shí)車(chē)測(cè)試,在VCU發(fā)生復(fù)位后約0.11s后恢復(fù)通訊,該功能可以在0.19s內(nèi)自動(dòng)恢復(fù)高壓狀態(tài),0.25s后自動(dòng)恢復(fù)整車(chē)驅(qū)動(dòng)就緒狀態(tài),0.38s后自動(dòng)恢復(fù)D擋并完成整個(gè)恢復(fù)過(guò)程。不需要駕駛員任何操作,整車(chē)恢復(fù)正常行駛狀態(tài)且沒(méi)有發(fā)生長(zhǎng)時(shí)間動(dòng)力丟失的現(xiàn)象(圖2)。
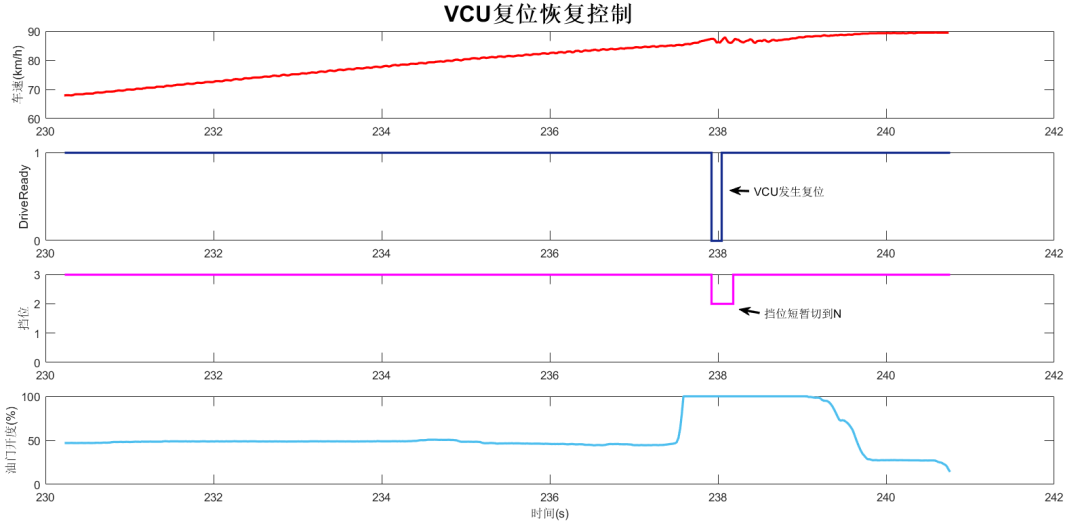
圖2 VCU 復(fù)位后自動(dòng)恢復(fù)可行駛狀態(tài)實(shí)測(cè)效果
支持多種協(xié)議的VCU充電主控功能
充電控制功能負(fù)責(zé)識(shí)別不同模式的充電需求,根據(jù)不同的模式選擇對(duì)應(yīng)充電控制過(guò)程。與供電設(shè)備(EVSE)、動(dòng)力電池BMS等充電相關(guān)部件協(xié)調(diào)交互,實(shí)現(xiàn)充電使能條件判斷,充電過(guò)程監(jiān)控,充電結(jié)束條件判斷等功能。開(kāi)發(fā)的軟件不僅能實(shí)現(xiàn)支持國(guó)標(biāo)交流/直流充電協(xié)議,也能滿(mǎn)足歐洲和北美的聯(lián)合充電系統(tǒng)(CCS)以及日本CHAdeMO充電協(xié)議(圖3)。為了解決充電設(shè)備的兼容性和充電時(shí)長(zhǎng)難以滿(mǎn)足電動(dòng)車(chē)車(chē)主的需求,軟件也實(shí)現(xiàn)了超級(jí)充電標(biāo)準(zhǔn)的充電控制功能。
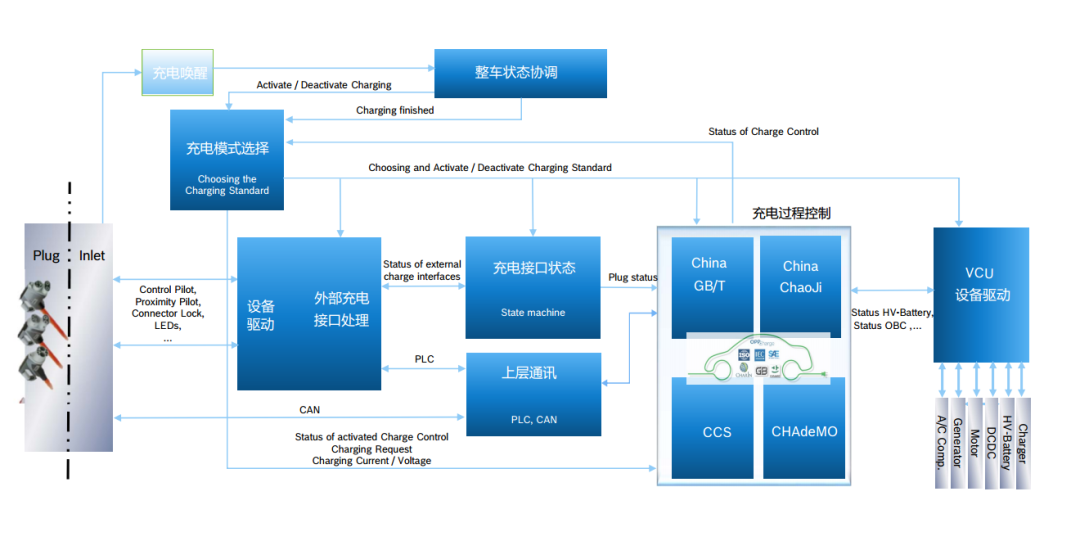
圖3 充電控制軟件架構(gòu)
剩余充電時(shí)間是指電動(dòng)車(chē)開(kāi)始充電到充電結(jié)束所花費(fèi)的時(shí)間,充電時(shí)間隨著車(chē)輛電量增多逐漸減小。剩余充電時(shí)間估算功能要求車(chē)輛在充電開(kāi)始階段就能準(zhǔn)確預(yù)測(cè)整個(gè)充電過(guò)程所花費(fèi)的時(shí)間,但電動(dòng)車(chē)充電過(guò)程中,充電時(shí)間受電芯特性、充電策略、樁輸出能力、整車(chē)熱管理和SOX估算精度等多個(gè)因素的影響,因此,高精度的剩余充電時(shí)間估算一直是行業(yè)難題。
聯(lián)合電子采用的是一種基于充電工況動(dòng)態(tài)修正的自適應(yīng)剩余充電時(shí)間估算算法,該算法將充電過(guò)程分為低電壓預(yù)充電,恒流充電和恒壓充電三個(gè)階段,算法根據(jù)每一階段的充電特征,分別估算各階段充電時(shí)間,然后累加求和得出總時(shí)間。在恒流充電階段,可以根據(jù)客戶(hù)需求配置基于電芯電壓或SOC階梯式充電策略的充電時(shí)間估算。
在充電過(guò)程中,算法通過(guò)增加充電樁輸出能力修正因子來(lái)預(yù)測(cè)未來(lái)充電樁最大輸出電流。對(duì)于高低溫工況,除了在充電開(kāi)始前計(jì)算電池預(yù)熱、預(yù)冷時(shí)間外,充電時(shí)間算法在充電過(guò)程中也會(huì)基于電池?zé)崮P秃碗姵匕鼰峁芾聿呗裕A(yù)測(cè)未來(lái)電池溫度,進(jìn)而確定電池未來(lái)的充電電流。對(duì)于充電末端,由于SOC精度造成充電時(shí)間偏差,算法增加基于單體電壓的充電時(shí)間倒計(jì)時(shí)算法以提高末端充電時(shí)間估算精度(圖4)。
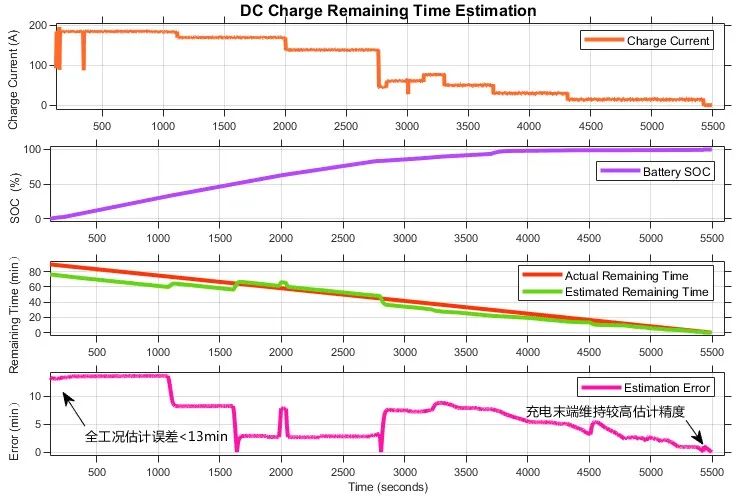
圖4 直流充電剩余時(shí)間計(jì)算實(shí)測(cè)效果
支持充電預(yù)熱的中低溫回路熱管理控制
熱管理控制功能可以協(xié)調(diào)來(lái)自于電池、電機(jī)、發(fā)動(dòng)機(jī)和駕駛艙等的加熱或冷卻需求(圖5),結(jié)合整車(chē)模式來(lái)決策和切換熱管理控制模式,進(jìn)而控制各子系統(tǒng)準(zhǔn)確的響應(yīng)各種來(lái)源的熱管理需求。開(kāi)發(fā)的軟件可以適用于純電和混動(dòng)項(xiàng)目中的多種熱管理拓?fù)浣Y(jié)構(gòu)。
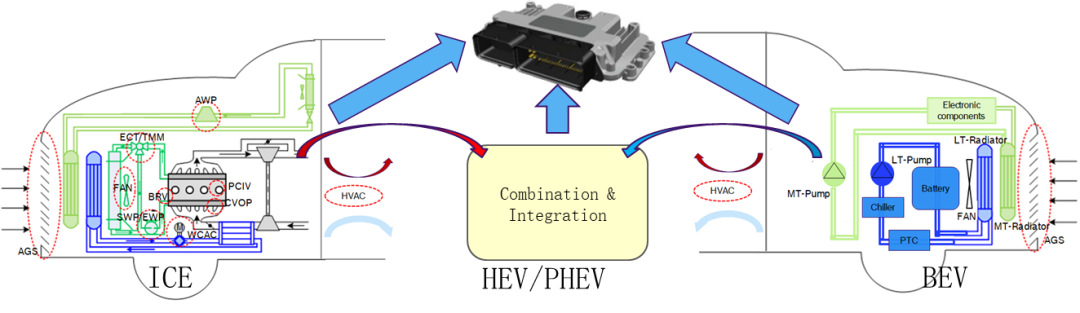
圖5 VCU熱管理需求來(lái)源
為了提升低溫環(huán)境下車(chē)輛上電后快速達(dá)到電池合適的運(yùn)行狀態(tài),開(kāi)發(fā)的電池遠(yuǎn)程預(yù)熱功能可以結(jié)合駕駛員的出行時(shí)間、電池狀態(tài)、充電狀態(tài)以及整車(chē)能量狀態(tài)對(duì)電池進(jìn)行預(yù)熱,在駕駛員用車(chē)時(shí)使電池性能達(dá)到最優(yōu)狀態(tài)。方案引入了一次喚醒計(jì)算預(yù)熱時(shí)間和二次喚醒執(zhí)行預(yù)熱的概念,并且在駕駛艙有預(yù)調(diào)節(jié)需求時(shí),引入特定的電管理和能量協(xié)調(diào)方案,進(jìn)而實(shí)現(xiàn)能耗、電池性能、駕駛艙舒適性最優(yōu)。
充電預(yù)熱控制可以實(shí)現(xiàn)用戶(hù)在低溫插槍充電時(shí),根據(jù)電池的預(yù)熱請(qǐng)求,控制電池處于預(yù)熱模式。在充電機(jī)輸出能力范圍內(nèi),由充電機(jī)輸出功率通過(guò)電池加熱器(PTC)對(duì)電池加熱。因?yàn)樵诔潆婎A(yù)熱模式下,電池的主繼電器在斷開(kāi)狀態(tài),能確保電池不會(huì)有電流輸入或輸出,確保不會(huì)對(duì)低溫條件下的電池造成損壞。當(dāng)電池被加熱到合適溫度后,再控制電池退出預(yù)熱模式進(jìn)入正常的充電模式。方案實(shí)現(xiàn)了在低溫下給電池充電有效保護(hù)電池的同時(shí),縮短充電時(shí)間,給用戶(hù)帶來(lái)更好的充電體驗(yàn)(圖6)。
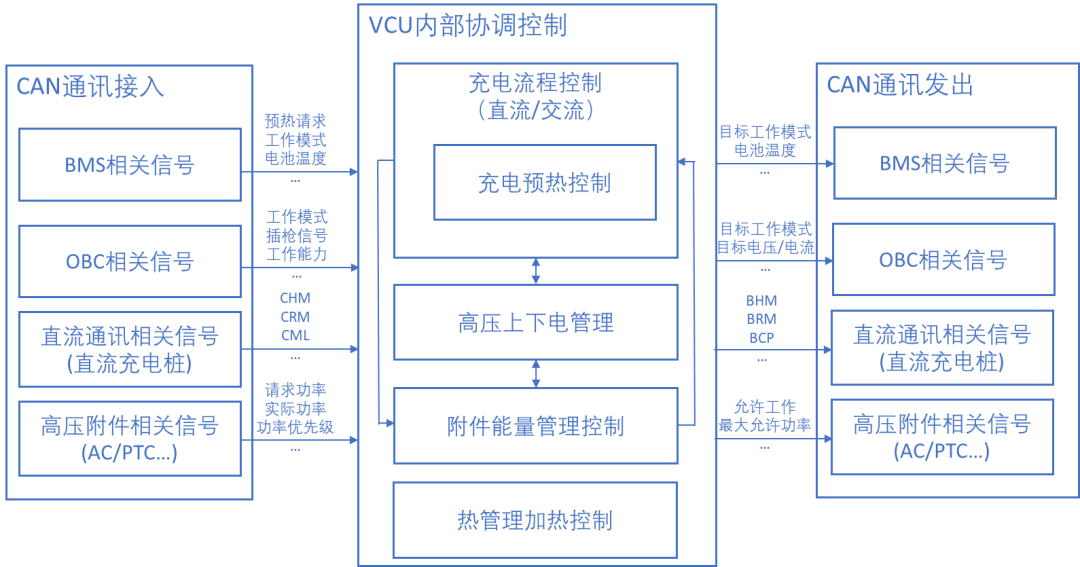
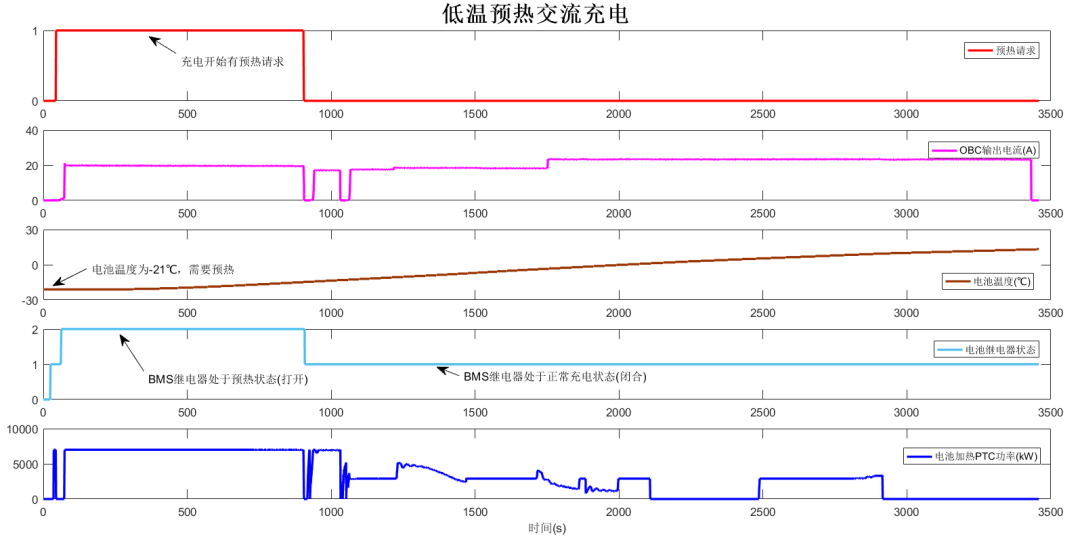
圖6 低溫交流充電預(yù)熱實(shí)測(cè)效果
低溫環(huán)境兼顧功率保護(hù)和駕駛性改善策略
在電池溫度很低時(shí)電池的充放電功率受限,行車(chē)過(guò)程中會(huì)經(jīng)常用到電池的功率邊界。當(dāng)整個(gè)系統(tǒng)在功率邊界附近運(yùn)行時(shí),會(huì)非常容易導(dǎo)致電池過(guò)充或過(guò)放發(fā)生。此時(shí)系統(tǒng)會(huì)進(jìn)行快速閉環(huán)調(diào)節(jié)以把電池功率調(diào)整到正常范圍內(nèi),但這會(huì)導(dǎo)致駕駛性變得很差。因此如何在低溫環(huán)境下同時(shí)兼顧功率邊界保護(hù)和可接受的駕駛性?xún)煞矫嬉恢笔切袠I(yè)的有個(gè)難題。
尤其對(duì)于多電機(jī)串并聯(lián)四驅(qū)拓?fù)浣Y(jié)構(gòu),各個(gè)電機(jī)實(shí)際功率都會(huì)相互影響彼此的功率邊界,是一個(gè)相互影響的多層閉環(huán)控制,某一個(gè)高壓部件功率抖動(dòng)都會(huì)影響其他部件的抖動(dòng)(圖7)。因此,在極低溫度時(shí)電池輸入輸出功率受限,并且拓?fù)浣Y(jié)構(gòu)中存在多電機(jī)耦合時(shí),更容易造成電池過(guò)充過(guò)放以及駕駛性抖動(dòng)。
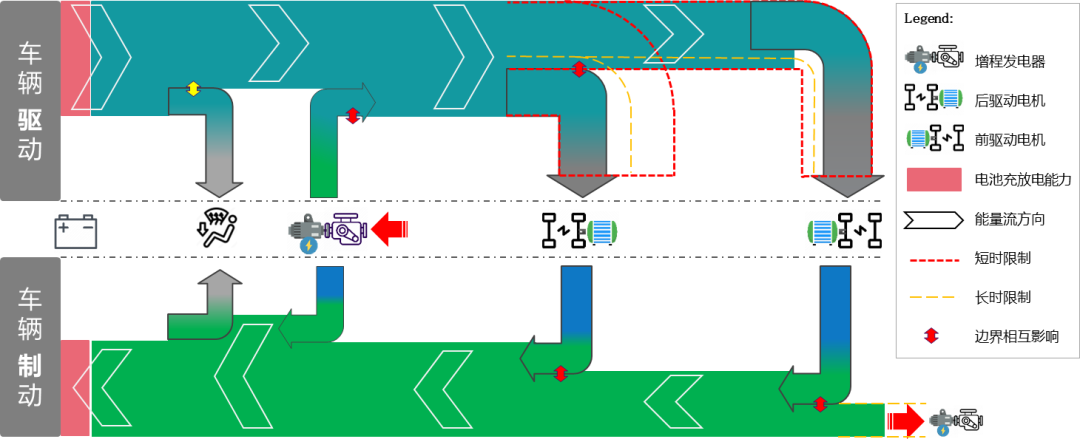
圖7 多電機(jī)串并聯(lián)四驅(qū)拓?fù)涔β蔬吔缬绊懯疽鈭D
針對(duì)多電機(jī)耦合的混動(dòng)系統(tǒng),通過(guò)大量策略?xún)?yōu)化以及低溫駕駛性試驗(yàn)驗(yàn)證對(duì)比,軟件將電池長(zhǎng)時(shí)功率進(jìn)行動(dòng)態(tài)邊界調(diào)節(jié),在扭矩結(jié)構(gòu)以及模式切換過(guò)程中,用電機(jī)長(zhǎng)時(shí)扭矩邊界對(duì)駕駛員驅(qū)動(dòng)需求進(jìn)行限制,用電機(jī)短時(shí)扭矩邊界對(duì)類(lèi)似ESP干涉、發(fā)動(dòng)機(jī)啟動(dòng)預(yù)留等扭矩需求進(jìn)行限制,保證滿(mǎn)足駕駛需求的同時(shí),不會(huì)出現(xiàn)電池過(guò)充過(guò)放的情況。通過(guò)電池功率預(yù)測(cè),電池限制功率閉環(huán)調(diào)節(jié),以及預(yù)測(cè)功率變化趨勢(shì)提前收窄或放寬功率限制邊界等方式。很好的解決了低溫環(huán)境下兼顧功率保護(hù)和駕駛性的效果(圖8)。
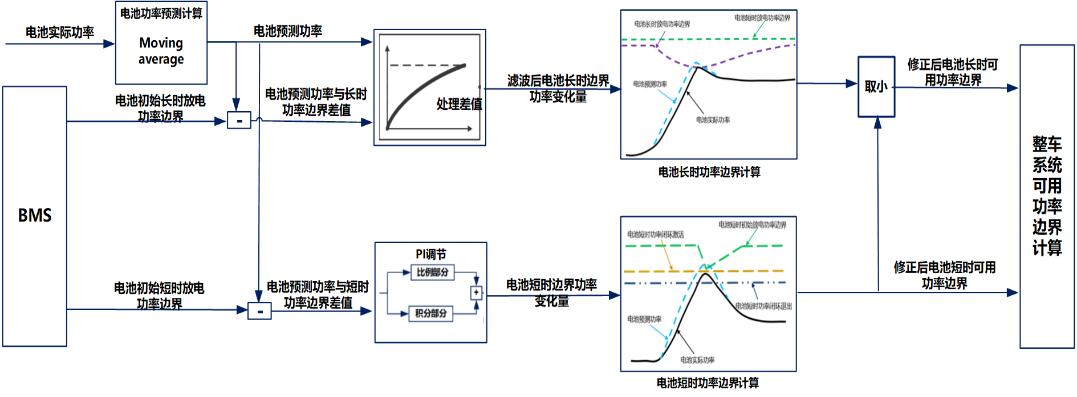
圖8 功率閉環(huán)保護(hù)功能框架
以低溫環(huán)境下起步全油門(mén)加速工況為例,通過(guò)上述軟件優(yōu)化措施,當(dāng)?shù)蜏毓r發(fā)電機(jī)實(shí)際功率波動(dòng)情況下,也可以保證電池功率不過(guò)放,并且前后電機(jī)準(zhǔn)確響應(yīng)扭矩邊界限制,避免駕駛抖動(dòng)的發(fā)生(圖9)。
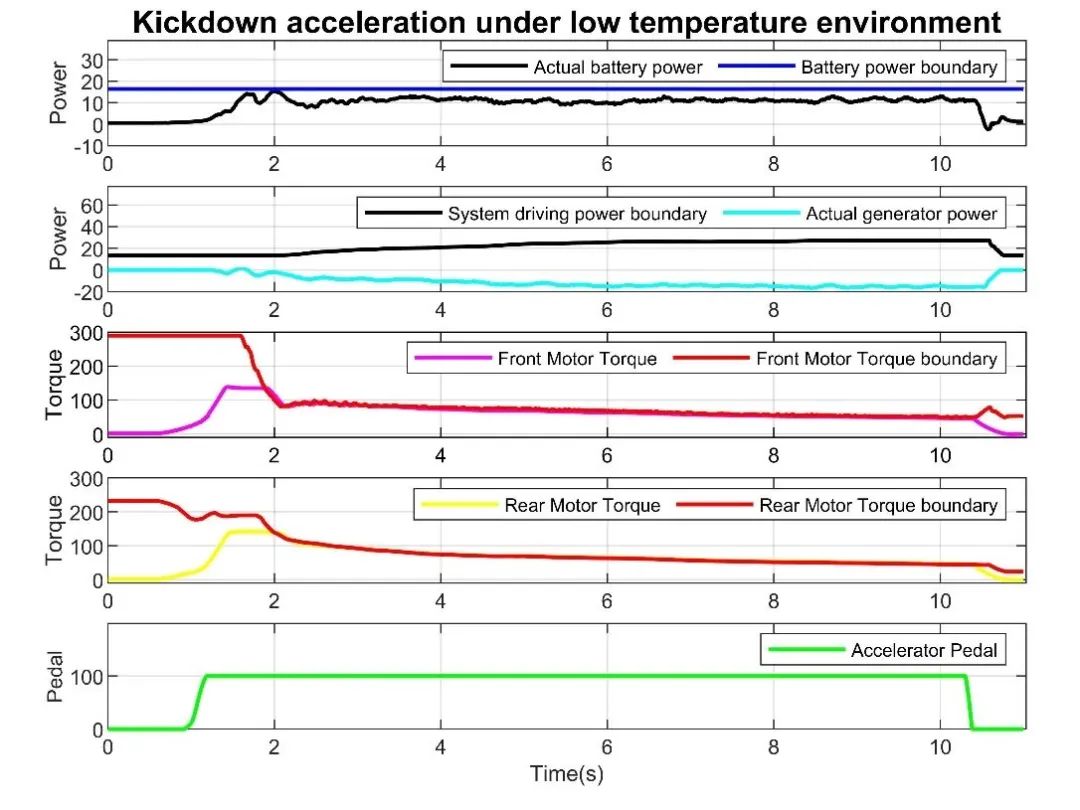
圖9 低溫全油門(mén)加速駕駛性實(shí)測(cè)效果
故障診斷和響應(yīng)
新能源汽車(chē)的動(dòng)力和高壓部件比傳統(tǒng)車(chē)多很多,車(chē)輛可能發(fā)生的故障類(lèi)型和數(shù)量以及不同場(chǎng)景下(駐車(chē)、充電、行車(chē)等)的故障發(fā)生后的后處理的方式也很多。故障診斷的及時(shí)性、故障后處理的合理性對(duì)駕駛員的駕駛體驗(yàn)和車(chē)輛安全性都有很大的影響。
基于對(duì)整車(chē)所有驅(qū)動(dòng)部件的700多個(gè)故障原因和影響梳理,結(jié)合整車(chē)可能的故障響應(yīng)方式,軟件針對(duì)不同場(chǎng)景下發(fā)生故障的嚴(yán)重性,設(shè)計(jì)了多個(gè)等級(jí)的故障響應(yīng)方式。在確保車(chē)輛安全的前提下,盡可能做到了駕駛體驗(yàn)的友好性。此外VCU作為整車(chē)OBD的主控制器,根據(jù)法規(guī)實(shí)現(xiàn)了不同部件發(fā)生故障發(fā)生后的亮燈需求協(xié)調(diào)和故障提示功能(圖10)。
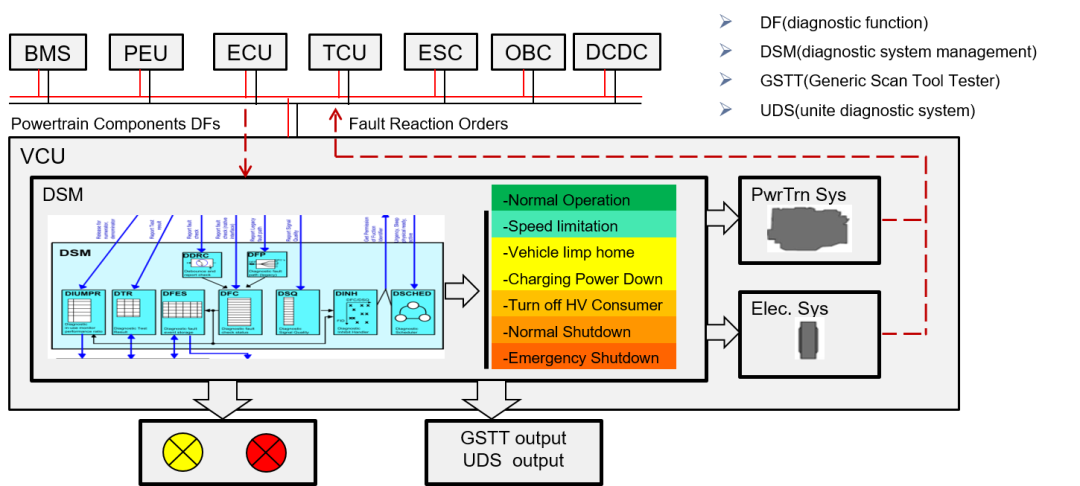
圖10 故障診斷和響應(yīng)功能框架
客戶(hù)收益
VCU系統(tǒng)軟件已支持多個(gè)客戶(hù)項(xiàng)目實(shí)現(xiàn)批產(chǎn),積累了豐富的車(chē)輛運(yùn)動(dòng)相關(guān)系統(tǒng)能力,有助于支持客戶(hù)充分定義、分解、驗(yàn)證相關(guān)系統(tǒng)需求。
完整且成熟的VCU平臺(tái)化軟件功能,可以滿(mǎn)足不同客戶(hù)化需求開(kāi)發(fā),為新項(xiàng)目開(kāi)發(fā)提供強(qiáng)有力的技術(shù)支撐。強(qiáng)大的本地開(kāi)發(fā)能力和靈活的開(kāi)發(fā)方式,有助于客戶(hù)快速實(shí)現(xiàn)VCU客戶(hù)化功能開(kāi)發(fā)驗(yàn)證和能力建設(shè)。
強(qiáng)大的本地開(kāi)發(fā)能力和靈活的開(kāi)發(fā)方式,快速實(shí)現(xiàn)客戶(hù)化功能需求開(kāi)發(fā)驗(yàn)證和能力建設(shè)。
全面的控制器產(chǎn)品線(xiàn)和智能網(wǎng)聯(lián)算法,實(shí)現(xiàn)基于VCU的功能融合拓展,為客戶(hù)在電子電器架構(gòu)快速變革的時(shí)代提供更多支持。
審核編輯 :李倩
-
新能源汽車(chē)
+關(guān)注
關(guān)注
141文章
10521瀏覽量
99415 -
VCU
+關(guān)注
關(guān)注
17文章
80瀏覽量
20547
原文標(biāo)題:新能源汽車(chē)的大腦——VCU核心功能介紹(下)
文章出處:【微信號(hào):聯(lián)合電子,微信公眾號(hào):聯(lián)合電子】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
新能源汽車(chē)散熱解決方案
NTC溫度傳感器:護(hù)航新能源汽車(chē)電池安全運(yùn)行
新能源汽車(chē)控制器詳解:VCU、ECU、MCU和電池BMS
整車(chē)控制器VCU應(yīng)用層算法開(kāi)發(fā)流程
新能源熱門(mén)方案_汽車(chē)充電樁/槍 Demo
解決方案丨PPEC車(chē)載DCDC轉(zhuǎn)換器:新能源汽車(chē)的高效能源動(dòng)力系統(tǒng)
新能源汽車(chē)驅(qū)動(dòng)系統(tǒng)控制之VCU核心功能

【換道賽車(chē):新能源汽車(chē)的中國(guó)道路 | 閱讀體驗(yàn)】 新能源到底新在何處?新能源在國(guó)內(nèi)如何發(fā)展?
【換道賽車(chē):新能源汽車(chē)的中國(guó)道路 | 閱讀體驗(yàn)】 A 序
【換道賽車(chē):新能源汽車(chē)的中國(guó)道路 | 閱讀體驗(yàn)】新能源汽車(chē)值得買(mǎi)嗎?未來(lái)又會(huì)如何發(fā)展
【換道賽車(chē):新能源汽車(chē)的中國(guó)道路 | 閱讀體驗(yàn)】1.汽車(chē)產(chǎn)業(yè)大變局
從0到1實(shí)現(xiàn)VCU:新能源汽車(chē)整車(chē)控制器

名單公布【書(shū)籍評(píng)測(cè)活動(dòng)NO.27】換道賽車(chē):新能源汽車(chē)的中國(guó)道路
新能源汽車(chē)的三大核心部件是什么





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論