") 埋在沙子中雷達(dá)目標(biāo)的相干雷達(dá)成像和檢測(cè)
埋在沙子中雷達(dá)目標(biāo)的相干雷達(dá)成像和檢測(cè)
無(wú)人機(jī)探地合成孔徑雷達(dá)(SAR)將無(wú)人機(jī)和雷達(dá)技術(shù)結(jié)合起來(lái),可以對(duì)地面進(jìn)行高分辨率的成像。這項(xiàng)技術(shù)可以應(yīng)用于軍事、民用和科學(xué)領(lǐng)域,例如對(duì)地形進(jìn)行三維成像、監(jiān)測(cè)冰川變化、或者搜索失聯(lián)人員等等。它的優(yōu)點(diǎn)是高效、準(zhǔn)確、靈活和經(jīng)濟(jì),可以在短時(shí)間內(nèi)完成大面積成像任務(wù)。此外,它的低視距優(yōu)勢(shì),還可以避免由于氣候和地形等因素所產(chǎn)生的影響。 下面視頻中介紹的是其中一個(gè)應(yīng)用場(chǎng)景:地雷探測(cè)。 視頻簡(jiǎn)單介紹了系統(tǒng)功能,自主導(dǎo)航和定位是生成高質(zhì)量GPSAR圖像的先決條件。該系統(tǒng)采用的是大疆M600 Pro微型無(wú)人機(jī)(MAV),載重高達(dá)6.0kg。用戶能夠指定一個(gè)地理參考的GPSAR任務(wù),然后MAV自主執(zhí)行。著陸后,MAV從同步的GNSS和IMU測(cè)量數(shù)據(jù)中自動(dòng)計(jì)算精確的雷達(dá)天線位置,并輸入到雷達(dá)成像過(guò)程中。 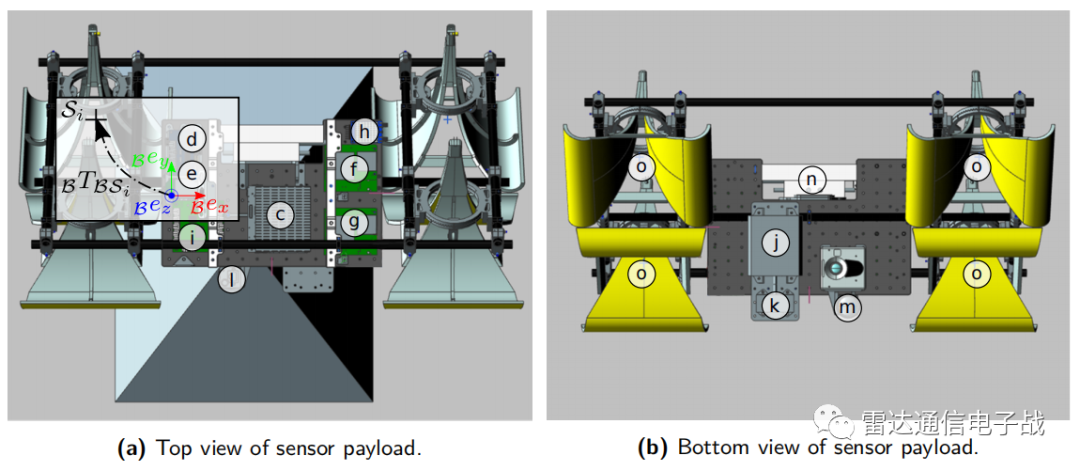 如上圖所示,板載計(jì)算單元(c)功能強(qiáng)大,可以記錄傳感器數(shù)據(jù),在線計(jì)算導(dǎo)航解決方案,并通過(guò)自動(dòng)駕駛儀和機(jī)器人操作系統(tǒng)(ROS)控制來(lái)MAV。VersaVIS (d)是一個(gè)帶有外設(shè)的MCU,用于連接傳感器。IMU(e)和兩個(gè)GNSS接收器(f)和(g),再加上兩個(gè)螺旋三波段天線和校正調(diào)制解調(diào)器(h),構(gòu)成了精確平臺(tái)定位所需的高精度導(dǎo)航解決方案的基礎(chǔ)。 所有組件均由單個(gè)電源板(i)供電,該電源板能夠?qū)AV的18v電源從機(jī)載電池轉(zhuǎn)換為5V,12V和24V。在吊艙的底部,雷達(dá)高度計(jì)(j)和激光雷達(dá)高度計(jì)(k)用于測(cè)量平臺(tái)相對(duì)于地面的高度(AGL)。相機(jī)(l)和鏡頭(m)生成航拍圖像,構(gòu)建用于路徑規(guī)劃和雷達(dá)成像的攝影測(cè)量圖。 另外,定制的1GHz至4GHz FMCW雷達(dá)(n)及其四個(gè)不同極化方向的喇叭天線(o)被用于GPSAR圖像。相機(jī)相對(duì)于IMUBTBS5的姿態(tài)通過(guò)校準(zhǔn)軟件確定。
如上圖所示,板載計(jì)算單元(c)功能強(qiáng)大,可以記錄傳感器數(shù)據(jù),在線計(jì)算導(dǎo)航解決方案,并通過(guò)自動(dòng)駕駛儀和機(jī)器人操作系統(tǒng)(ROS)控制來(lái)MAV。VersaVIS (d)是一個(gè)帶有外設(shè)的MCU,用于連接傳感器。IMU(e)和兩個(gè)GNSS接收器(f)和(g),再加上兩個(gè)螺旋三波段天線和校正調(diào)制解調(diào)器(h),構(gòu)成了精確平臺(tái)定位所需的高精度導(dǎo)航解決方案的基礎(chǔ)。 所有組件均由單個(gè)電源板(i)供電,該電源板能夠?qū)AV的18v電源從機(jī)載電池轉(zhuǎn)換為5V,12V和24V。在吊艙的底部,雷達(dá)高度計(jì)(j)和激光雷達(dá)高度計(jì)(k)用于測(cè)量平臺(tái)相對(duì)于地面的高度(AGL)。相機(jī)(l)和鏡頭(m)生成航拍圖像,構(gòu)建用于路徑規(guī)劃和雷達(dá)成像的攝影測(cè)量圖。 另外,定制的1GHz至4GHz FMCW雷達(dá)(n)及其四個(gè)不同極化方向的喇叭天線(o)被用于GPSAR圖像。相機(jī)相對(duì)于IMUBTBS5的姿態(tài)通過(guò)校準(zhǔn)軟件確定。 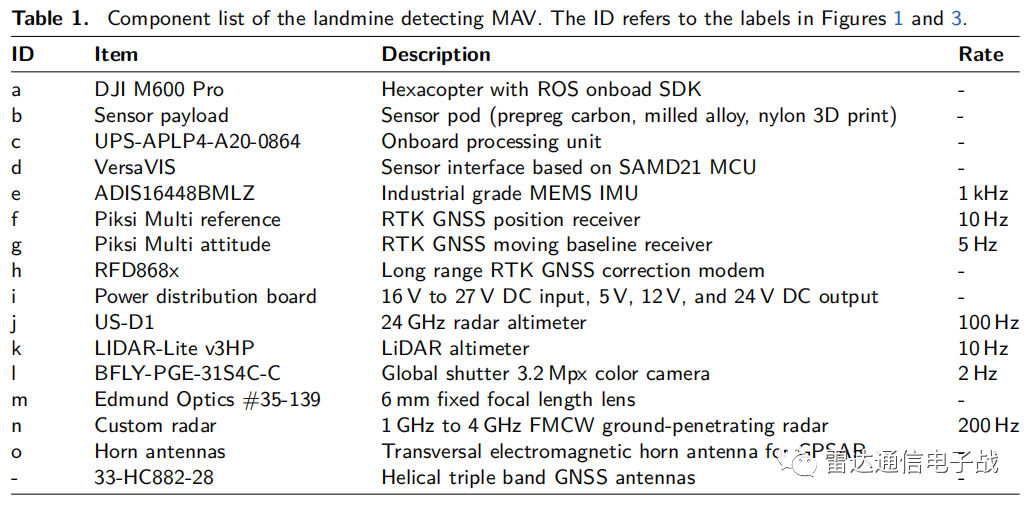 為了安全起見(jiàn),操作人員可以隨時(shí)使用遙控器(RC)中斷任務(wù)。任務(wù)本身也可以根據(jù)地理參考地圖,在現(xiàn)場(chǎng)或辦公室的操作人員筆記本電腦上進(jìn)行規(guī)劃,如下圖b所示。 在測(cè)量RTK GNSS基站位置后,任務(wù)自動(dòng)執(zhí)行,所有處理和數(shù)據(jù)記錄都在圖c所示的有限狀態(tài)機(jī)控制的平臺(tái)上進(jìn)行。有限狀態(tài)機(jī)啟動(dòng)傳感器記錄并自動(dòng)起飛MAV。平臺(tái)上升到無(wú)碰撞高度,例如30米,先飛行到任務(wù)開(kāi)始上方的位置。然后下降到任務(wù)高度,執(zhí)行預(yù)先規(guī)劃的軌跡。完成后,平臺(tái)飛回高空,返回起飛位置,最后自動(dòng)著陸。著陸后從板載計(jì)算機(jī)下載傳感器和定位數(shù)據(jù),傳給光學(xué)或雷達(dá)成像處理器。
為了安全起見(jiàn),操作人員可以隨時(shí)使用遙控器(RC)中斷任務(wù)。任務(wù)本身也可以根據(jù)地理參考地圖,在現(xiàn)場(chǎng)或辦公室的操作人員筆記本電腦上進(jìn)行規(guī)劃,如下圖b所示。 在測(cè)量RTK GNSS基站位置后,任務(wù)自動(dòng)執(zhí)行,所有處理和數(shù)據(jù)記錄都在圖c所示的有限狀態(tài)機(jī)控制的平臺(tái)上進(jìn)行。有限狀態(tài)機(jī)啟動(dòng)傳感器記錄并自動(dòng)起飛MAV。平臺(tái)上升到無(wú)碰撞高度,例如30米,先飛行到任務(wù)開(kāi)始上方的位置。然后下降到任務(wù)高度,執(zhí)行預(yù)先規(guī)劃的軌跡。完成后,平臺(tái)飛回高空,返回起飛位置,最后自動(dòng)著陸。著陸后從板載計(jì)算機(jī)下載傳感器和定位數(shù)據(jù),傳給光學(xué)或雷達(dá)成像處理器。 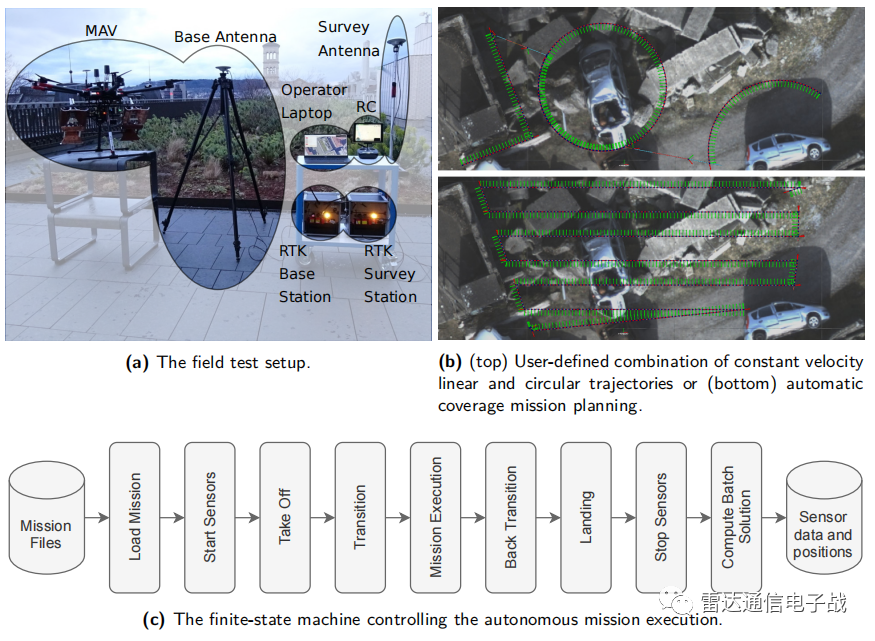 關(guān)于該試驗(yàn)的文獻(xiàn)資料共40頁(yè),詳細(xì)介紹了系統(tǒng)工作原理和過(guò)程,并試驗(yàn)驗(yàn)證了定位精度,實(shí)現(xiàn)了對(duì)埋在沙子中雷達(dá)目標(biāo)的相干雷達(dá)成像和檢測(cè),驗(yàn)證了其用于地雷探測(cè)的潛力。
關(guān)于該試驗(yàn)的文獻(xiàn)資料共40頁(yè),詳細(xì)介紹了系統(tǒng)工作原理和過(guò)程,并試驗(yàn)驗(yàn)證了定位精度,實(shí)現(xiàn)了對(duì)埋在沙子中雷達(dá)目標(biāo)的相干雷達(dá)成像和檢測(cè),驗(yàn)證了其用于地雷探測(cè)的潛力。
-
傳感器
+關(guān)注
關(guān)注
2557文章
51729瀏覽量
758812 -
軟件
+關(guān)注
關(guān)注
69文章
5063瀏覽量
88445 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
2991瀏覽量
118448
原文標(biāo)題:無(wú)人機(jī)探地SAR的應(yīng)用場(chǎng)景之一:地雷探測(cè)
文章出處:【微信號(hào):雷達(dá)通信電子戰(zhàn),微信公眾號(hào):雷達(dá)通信電子戰(zhàn)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
激光雷達(dá)分類(lèi)以及應(yīng)用
雷達(dá)傳感器的新型熱門(mén)應(yīng)用
雷達(dá)傳感器的新型熱門(mén)應(yīng)用
射頻測(cè)量在現(xiàn)代雷達(dá)和電子戰(zhàn)信號(hào)設(shè)計(jì)驗(yàn)證的應(yīng)用
正點(diǎn)原子的EP4可以做雷達(dá)成像嘛?
C2激光相干成像雷達(dá)在巡航導(dǎo)彈導(dǎo)航及戰(zhàn)術(shù)彈道導(dǎo)彈末制導(dǎo)中的應(yīng)
MIMO雷達(dá)的相干脈沖串檢測(cè)性能
基于波動(dòng)方程的近場(chǎng)目標(biāo)成像算法
基于FPGA雷達(dá)成像方位脈沖壓縮系統(tǒng)的設(shè)計(jì)
雙基地MIMO雷達(dá)相干目標(biāo)角度估計(jì)
基于Xilinx開(kāi)發(fā)平臺(tái)和FPGA器件實(shí)現(xiàn)一維成像雷達(dá)目標(biāo)識(shí)別

基于后向散射場(chǎng)數(shù)據(jù)的艦船目標(biāo)高分辨雷達(dá)成像技術(shù)
相干雷達(dá)與偽相干雷達(dá)解析
分析目標(biāo)的雷達(dá)散射截面積研究
現(xiàn)代雷達(dá)成像技術(shù)的常見(jiàn)分類(lèi)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論