


前言
本章節是對上一章節的補充,上一章節恒壓頻比開環控制系統采用SPWM控制方式實現,本章節采用SVPWM控制方式實現,也為后續章節的分析奠定一個基礎。
一、SVPWM
有關SVPWM控制方式在本章節不展開分析,后續會專門寫一章節進行分析。交流電機需要輸入三相正弦電流的最終目的就是在電機空間形成圓形磁場,從而產生恒定的電磁轉矩。把逆變器和交流電機視為一個整體,以圓形旋轉磁場為目標來控制逆變器的工作,這種控制方法稱為“磁鏈跟蹤控制”,磁鏈軌跡的控制是通過交替使用不同的電壓空間矢量實現的,所以又稱為“電壓空間矢量PWM控制”,即SVPWM。
與SPWM控制相比,SVPWM有更高的電壓利用率,其輸出電壓最高可提高15%左右。
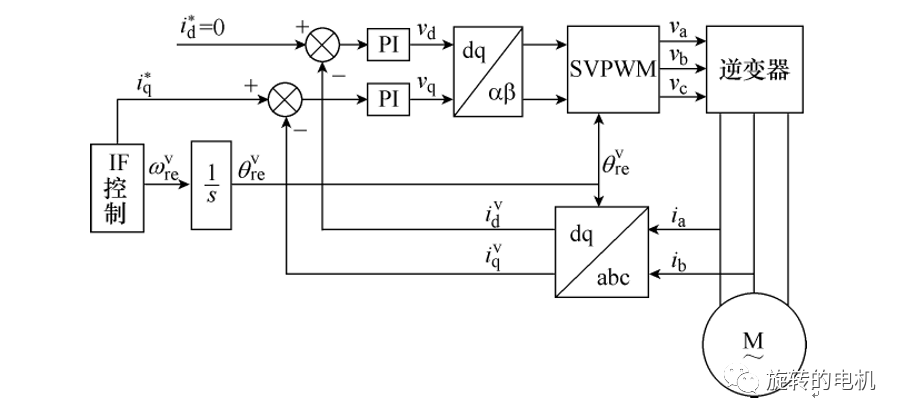
二、永磁同步電機恒壓頻比開環控制系統Matlab/Simulink仿真分析
永磁同步電機恒壓頻比開環控制系統Matlab/Simulink仿真框圖如下:
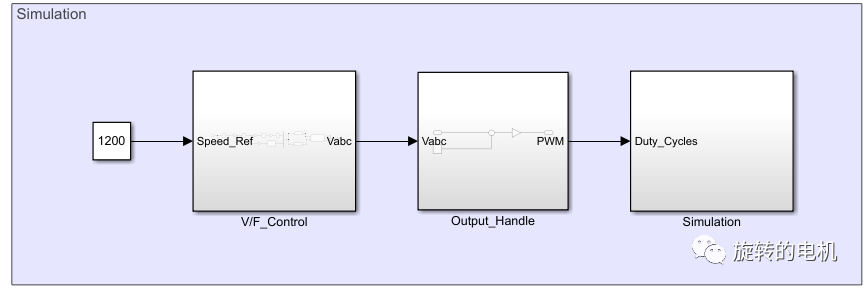
2.1.仿真電路分析
2.1.1.恒壓頻比控制算法
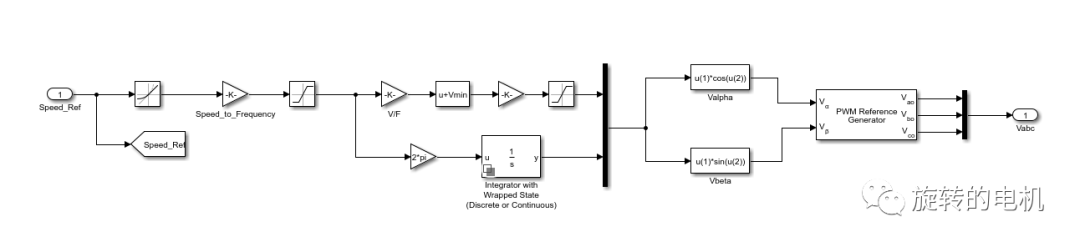
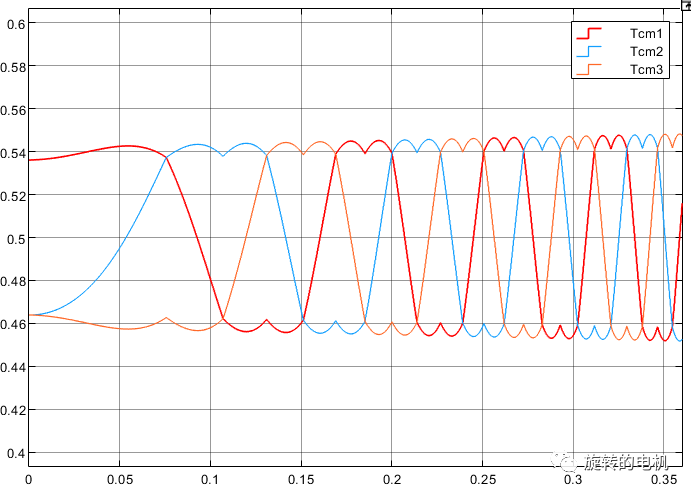
與上一章節的不同點就是,生成的αβ坐標系下的電壓沒有經過反Clark變換生成輸入到電機的三相電壓實現SPWM控制,而是生成馬鞍波實現SVPWM控制。
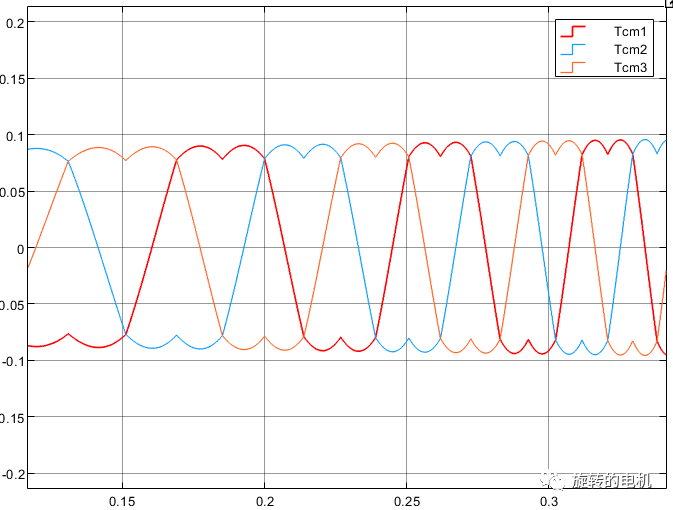
目標轉速1200r/min時的SVPWM波形如下所示:
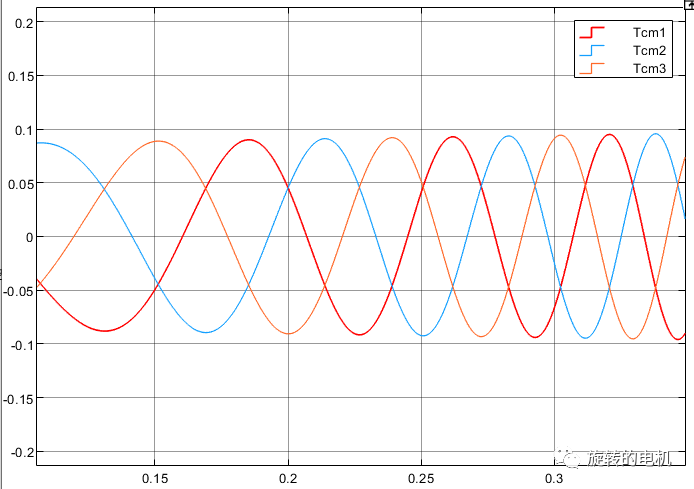
上一章節兩相坐標系經反Clark變換生成的是標準的正弦波如下所示:
2.1.2.輸出處理
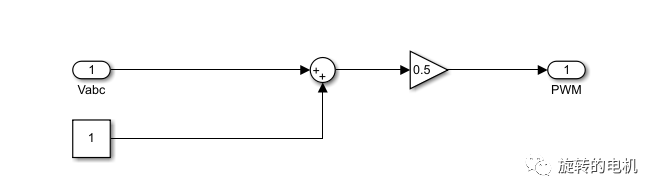
與上一章節一致,此處作了一個歸一化處理,使SVPWM輸出的波形在[0 1]區間內。
2.1.3.主電路
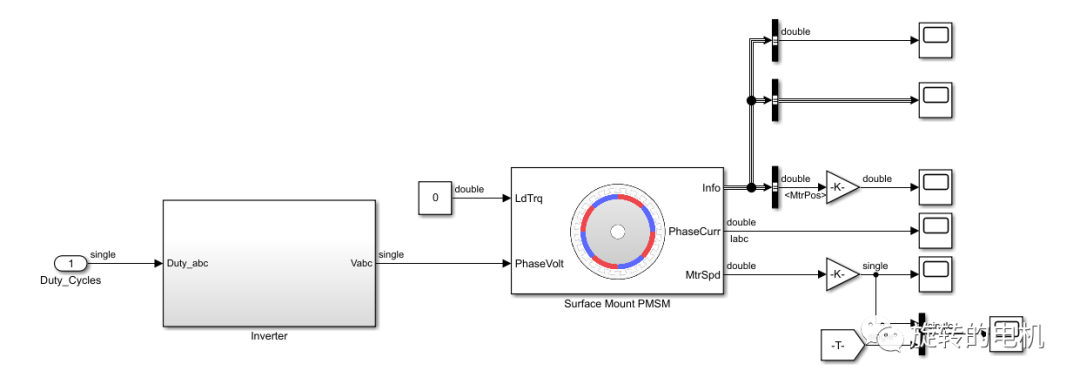
主電路為三相逆變電路與永磁同步電機,設置同上一章節。
2.2.仿真結果分析
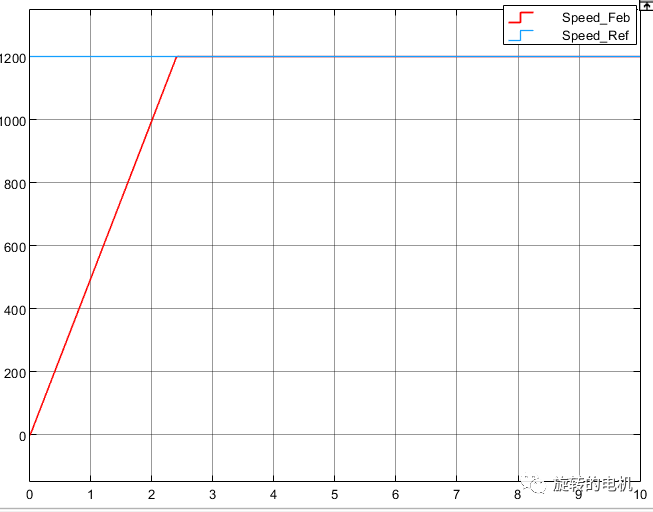
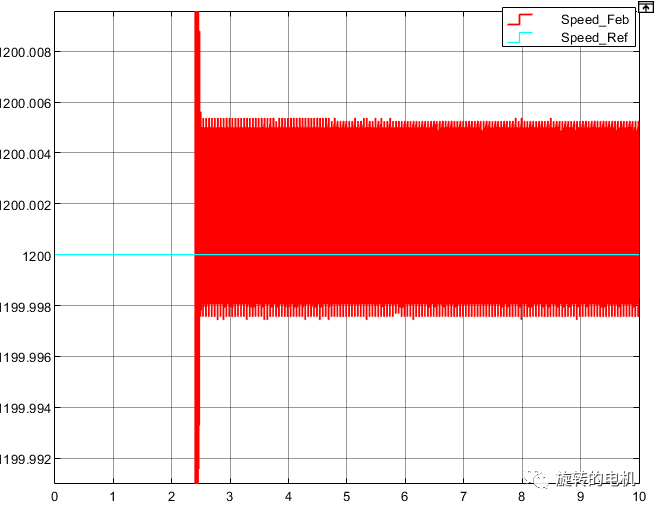
2.2.1.設定目標轉速為1200r/min
目標轉速與實際轉速的波形曲線:
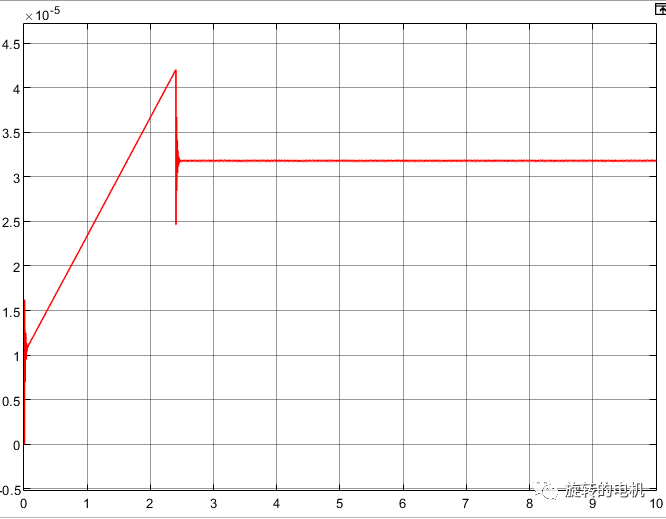
穩態時,目標轉速與實際轉速的誤差:
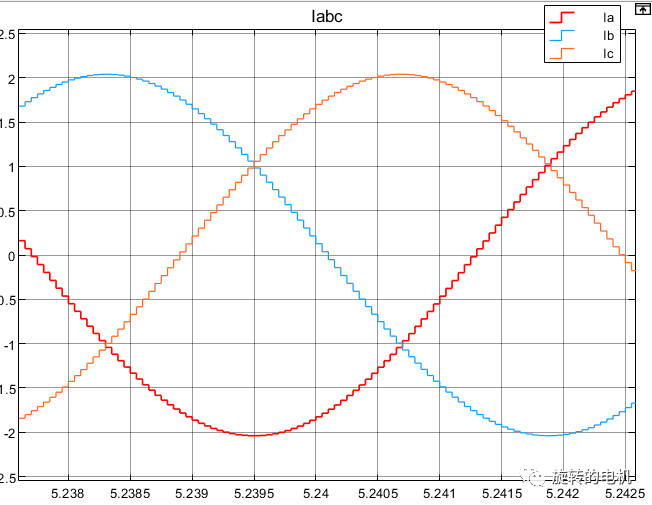
穩態時,電機定子電流:
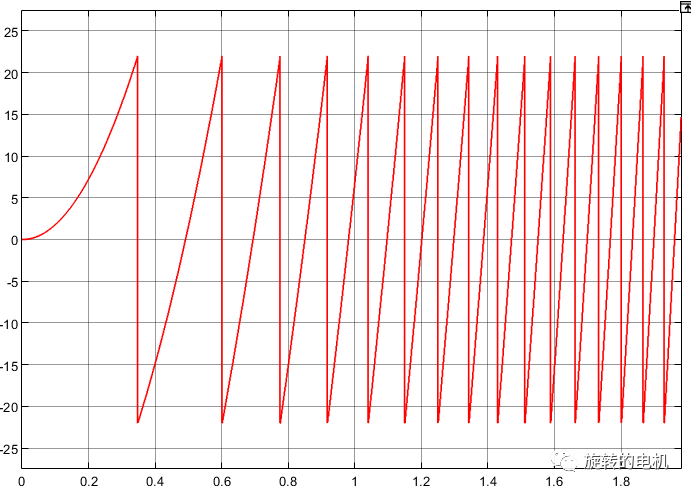
電機轉子位置:
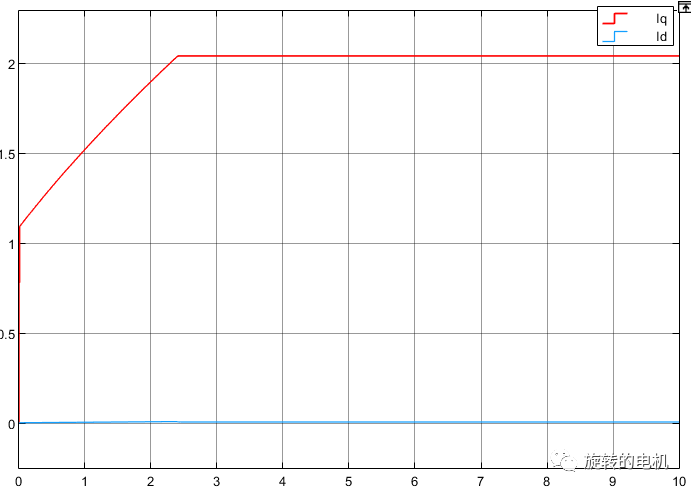
dq坐標系下的定子電流值:
電磁轉矩:
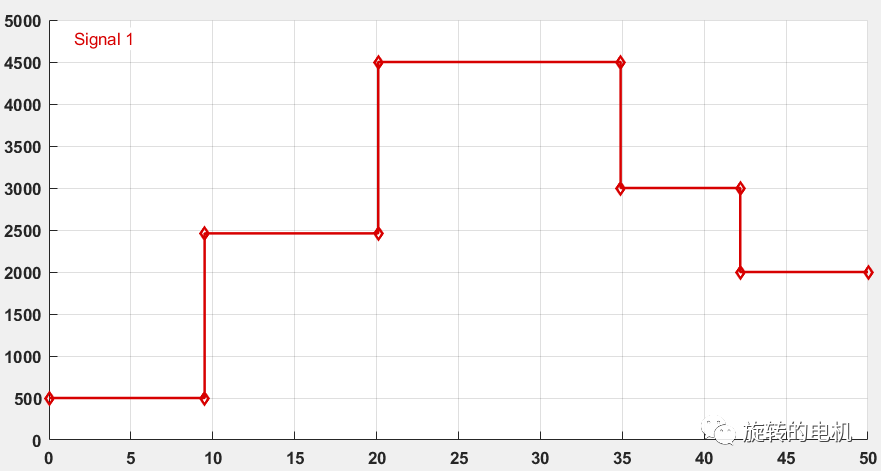
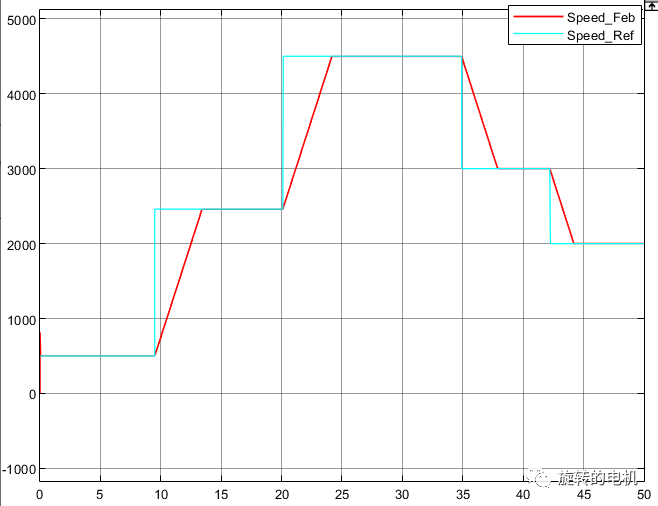
2.2.1.設定目標轉速為變化值
目標轉速:
目標轉速與實際轉速:
三、永磁同步電機恒壓頻比開環控制系統代碼生成及工程實現
功能需求、硬件設計、軟件設計以及代碼生成同上一章節。
3.1.仿真驗證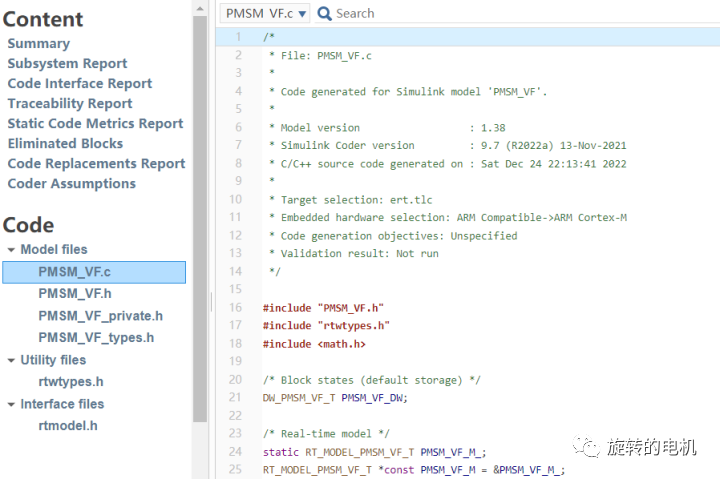
3.1.仿真驗證
編譯下載到開發板觀察實驗現象
總結
作為上一章節的補充,本章節采用SVPWM的控制方式實現了永磁同步電機恒壓頻比開環控制的Matlab/Simulink仿真及工程實現,為后續章節的分析奠定基礎。
-
matlab
+關注
關注
189文章
3003瀏覽量
234320 -
永磁同步電機
+關注
關注
28文章
878瀏覽量
50718 -
仿真
+關注
關注
52文章
4297瀏覽量
135978 -
SPWM
+關注
關注
14文章
361瀏覽量
61984 -
SVPWM
+關注
關注
15文章
615瀏覽量
91657
發布評論請先 登錄
太實用!永磁同步電機控制方案及MATLAB仿真模型大全
永磁同步電機直接轉矩控制系統中的MATLAB/Simulink建模方法
永磁同步電機控制系統的模型建立和仿真資料說明

永磁同步電機FOC控制的基本原理及Matlab/Simulink仿真分析





 工商網監
工商網監

評論