") FPGA入門之復位電路設(shè)計
FPGA入門之復位電路設(shè)計
前面在時序分析中提到過亞穩(wěn)態(tài)的概念,每天學習一點FPGA知識點(9)之時序分析并且在電路設(shè)計中如果不滿足Tsu(建立時間)和Th(保持時間),很容易就出現(xiàn)亞穩(wěn)態(tài);在跨時鐘域傳輸?shù)囊幌盗写胧┮彩菫榱私档蛠喎€(wěn)態(tài)發(fā)生的概率。
今天再說另一個可能會產(chǎn)生亞穩(wěn)態(tài)問題的電路;
復位電路;
1??recovery time和removal time
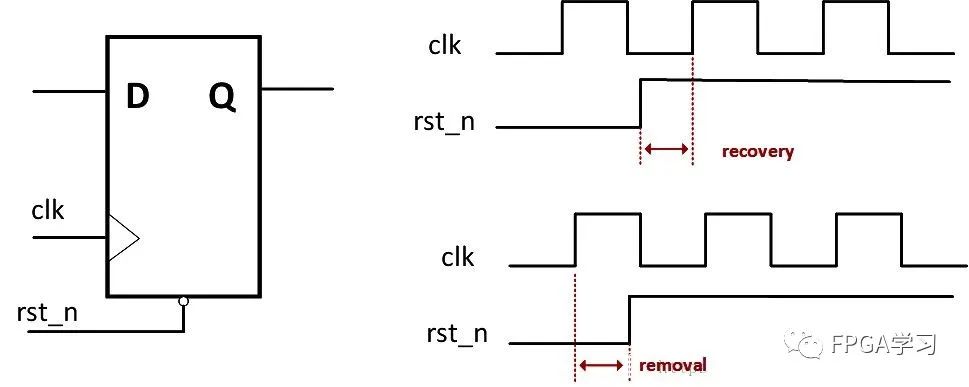
在正式開始復位電路設(shè)計之前,先說明兩個概念,恢復時間(recovery time)和移除時間(removal time)。[注,此處以低電平復位為例]
恢復時間:撤銷復位時,復位信號無效到時鐘有效沿來臨之前需要維持的最小的時間,稱為恢復時間,類似于同步時鐘的建立時間setup time;
移除時間:撤銷復位時,在時鐘有效沿來臨之后復位信號還需要保持復位狀態(tài)的時間為去除時間,類似于同步時鐘的保持時間hold time;
如下圖所示:
[注]:
①概念中所說的兩個時鐘沿并不是同一個時鐘沿,可以從另一個角度解釋:以復位結(jié)束的上升沿(低電平復位的情況下)為基準,復位結(jié)束前一個時鐘沿到復位結(jié)束之間為移除時間;復位結(jié)束后到下一個時鐘沿之間為恢復時間。
②兩個定義都是在復位結(jié)束的時候定義的,因為復位結(jié)束,系統(tǒng)馬上處于工作狀態(tài),所以才需要考慮亞穩(wěn)態(tài)問題。
2??同步復位和異步復位
①同步復位
同步復位:指的是加到所有功能觸發(fā)器上的復位信號完全同步于時鐘信號源。復位信號只有在時鐘上升沿到來時,才能有效,否則,無法完成對系統(tǒng)的復位工作。復位原理如下圖所示:

[圖源:CSDN@小汪的IC自習室]
其代碼如下:
module test(
input sys_clk,
input sys_rst_n,
input din,
output reg dout
);
always@(posedge sys_clk) begin
if(!sys_rst_n)
dout <= 1'b0;
else
dout <= din;
end
endmodule
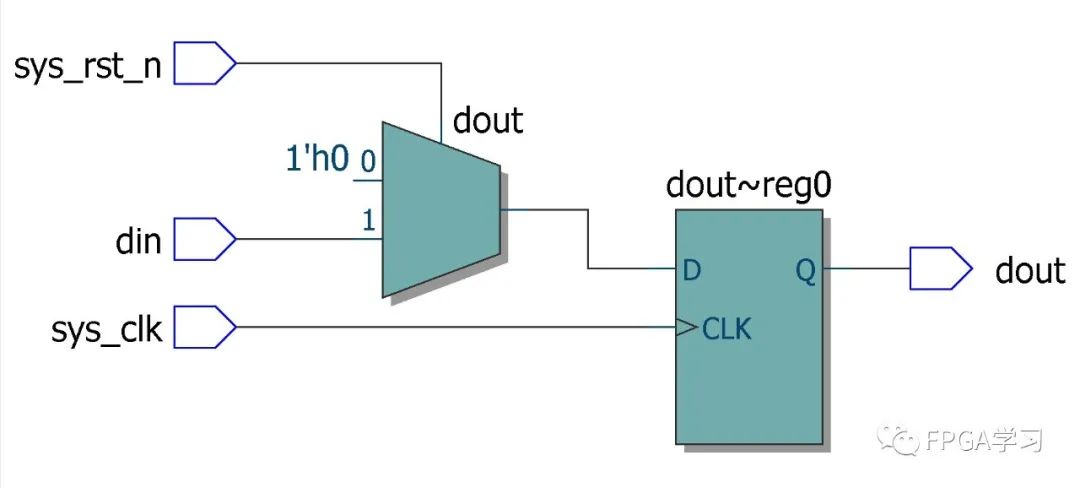
綜合后的電路圖如下:
優(yōu)點 :
*系統(tǒng)為同步時序,有利于時序分析;
*抗干擾性能好,能有效剔除信號中短于時鐘周期的毛刺;
缺點 :
*復位信號的有效時長必須大于時鐘周期,才能真正被系統(tǒng)識別并完成復位。同時還要考慮如:時鐘偏移、組合邏輯路徑延時、復位延時等因素。
*由于大多數(shù)的廠商目標庫內(nèi)的觸發(fā)器都只有異步復位端口,采用同步復位的話,就會耗費較多的邏輯資源(如上圖中使用了一個2選1多路選擇器)。
②異步復位
復位信號直接接到功能觸發(fā)器的異步復位引腳,復位只與復位信號有關(guān),與時鐘無關(guān)。無論時鐘沿是否到來,只要復位信號有效,就對系統(tǒng)進行復位。異步復位的工作原理如下圖所示:

其代碼如下:
module test(
input sys_clk,
input sys_rst_n,
input din,
output reg dout
);
always@(posedge sys_clk or negedge sys_rst_n) begin
if(!sys_rst_n)
dout <= 1'b0;
else
dout <= din;
end
endmodule
綜合出的電路圖,如下圖所示:
 通過這個圖能很明顯得看出來,比同步復位電路少用了一些資源。
通過這個圖能很明顯得看出來,比同步復位電路少用了一些資源。
優(yōu)點 :
*異步復位信號識別方便,很容易應(yīng)用到全局復位;
*可以節(jié)省邏輯資源(對比兩個復位電路即可看出);
缺點 :
*復位信號容易受到毛刺的影響,一點毛刺信號就有可能引發(fā)電路復位,造成系統(tǒng)運行錯誤。
*復位信號的釋放具有隨機性,如果復位信號釋放不滿足recovery或者removal,則會導致亞穩(wěn)態(tài)的產(chǎn)生。
當然了,其實在同步復位情況下,也會有亞穩(wěn)態(tài)問題的產(chǎn)生,詳情參考文章《 FPGA中亞穩(wěn)態(tài)——讓你無處可逃 》,作者博客園:@屋檐下的龍卷風。
3??異步復位同步釋放
對于復位情況下的亞穩(wěn)態(tài),常常是因為不滿足時序要求造成的(主要是recovery和removal),最常用的處理方式是異步復位,同步釋放。
通過異步復位和同步釋放,可以使復位信號到來時,不受時鐘控制,可以立即復位;但是復位信號釋放時,受同步時鐘控制。
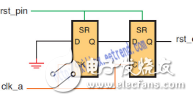
其電路原理圖如下:

先通過兩級觸發(fā)器進行異步復位信號的同步,輸出的信號作為后續(xù)整個系統(tǒng)的復位信號;
其對應(yīng)的代碼如下:
module test(
input sys_clk, //系統(tǒng)時鐘信號
input async_rst_n, //外部輸入的復位信號
input din, //輸入的數(shù)據(jù)信號
output reg dout //輸出的數(shù)據(jù)信號
);
reg sync_rst_n1; //第一級觸發(fā)器輸出
reg sync_rst_n2; //第二級觸發(fā)器輸出,經(jīng)釋放同步后的復位信號
always@(posedge sys_clk or negedge async_rst_n)begin
if(!async_rst_n)begin
sync_rst_n1 <= 1'b0;
sync_rst_n2 <= 1'b0;
end
else begin
sync_rst_n1 <= 1'b1;
sync_rst_n2 <= sync_rst_n1;
end
end
always@(posedge sys_clk or negedge sync_rst_n2) begin
if(!sync_rst_n2)
dout <= 1'b0;
else
dout <= din;
end
endmodule
綜合后的電路圖如圖所示:

接下來,對該電路進行仿真分析,看看是如何異步復位、同步釋放的。testbench文件如下:
`timescale 1ns/1ps
module test_tb;
reg sys_clk; //系統(tǒng)時鐘信號
reg async_rst_n; //外部輸入的復位信號
reg din; //輸入的數(shù)據(jù)信號
wire dout; //輸出的數(shù)據(jù)信號
test test_u1(
.sys_clk(sys_clk), //系統(tǒng)時鐘信號
.async_rst_n(async_rst_n), //外部輸入的復位信號
.din(din), //輸入的數(shù)據(jù)信號
.dout(dout) //輸出的數(shù)據(jù)信號
);
always #10 sys_clk = ~sys_clk;
initial begin
sys_clk = 0;
async_rst_n = 0;
din = 1;
#19;
async_rst_n = 1;
#99;
async_rst_n = 0;
#34;
async_rst_n = 1;
#97;
async_rst_n = 0;
#3;
async_rst_n = 1;
#71;
async_rst_n = 0;
#16;
async_rst_n = 1;
#200;
$stop;
end
endmodule
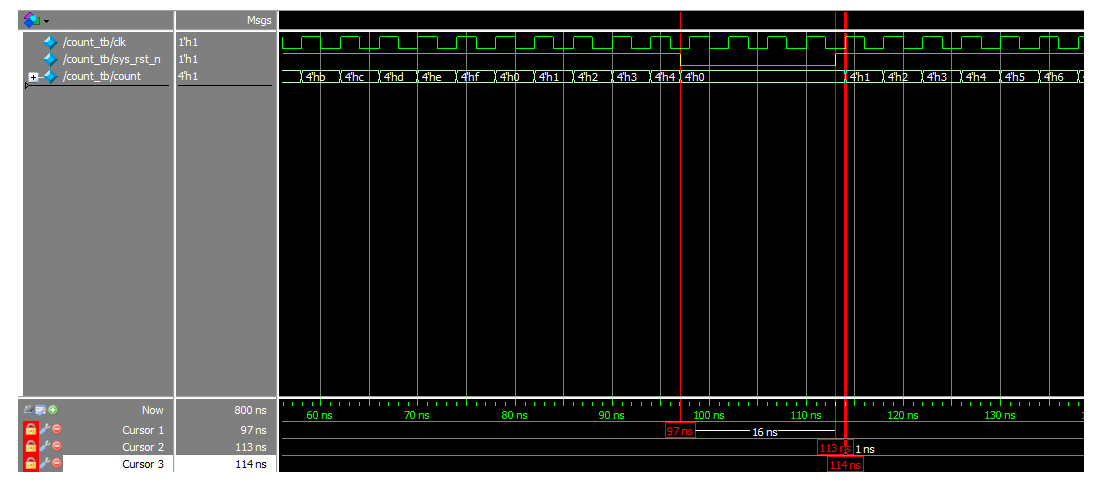
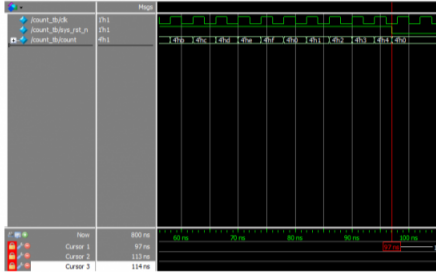
當然了,我只是簡單的仿真一下,也許寫的testbench并不是很好,能說明問題即可,仿真圖如下圖所示:

上圖中,很明顯的可以看出,異步復位信號(低電平)到來時,dout立馬變?yōu)?,但是在復位信號釋放后延遲兩個周期,到第三個周期才真正的恢復到工作狀態(tài);這跟我們一開始使用的兩級觸發(fā)器對釋放信號進行同步有關(guān)系。
異步復位和同步釋放,其實可以分開來看,單純的理解為兩個信號來控制著整個系統(tǒng)。同步釋放信號相對于外部復位信號的釋放總是存在一定的延遲,不過延遲很小,也就兩個周期,實際中也是可以接受的。
關(guān)于復位電路的設(shè)計就暫時說到這里,不過好像沒有說完,還有關(guān)于配置PLL之后的系統(tǒng)復位電路怎么設(shè)計等等,以后再詳細討論
-
FPGA
+關(guān)注
關(guān)注
1629文章
21729瀏覽量
603009 -
亞穩(wěn)態(tài)
+關(guān)注
關(guān)注
0文章
46瀏覽量
13268 -
復位電路
+關(guān)注
關(guān)注
13文章
322瀏覽量
44586 -
時序分析
+關(guān)注
關(guān)注
2文章
127瀏覽量
22565
發(fā)布評論請先 登錄
相關(guān)推薦
FPGA和CPLD內(nèi)部自復位電路設(shè)計方案
fpga設(shè)計實戰(zhàn):復位電路仿真設(shè)計
Xilinx FPGA入門連載17:PWM蜂鳴器驅(qū)動之復位與FPGA重配置功能
復位電路設(shè)計選型指南
FPGA的理想的復位方法和技巧
FPGA怎么搭復位電路 fpga復位電路設(shè)計方案
實現(xiàn)FPGA實戰(zhàn)復位電路的設(shè)計和仿真
FPGA內(nèi)部自復位電路設(shè)計方案
復位電路設(shè)計分析
FPGA復位電路的實現(xiàn)方式
FPGA復位的8種技巧






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論