 單片機上電復位電路圖分享2
單片機上電復位電路圖分享2
兩種復位的原理:
a:開機時復位原理
單片機接上電源后,電容會開始充電,兩邊的電壓會從0v上升到5v,同時電阻兩邊的電壓(RST引腳電壓)會從5v下降到0v。電容兩邊電壓從0v上升到3.5v(電源電壓的0.7倍)所用的時間為10k*10uF=0.1s,在這0.1s內引腳為高電平,之后就會一直是低電平。開機因為滿足復位條件,所以單片機復位。
b:復位按鈕復位
假如按住復位按鈕的時間是0.1s,則電容兩邊電壓會從5v下降到1.5v。之后因為按鈕松開段路,電容又從1.5v上升到5v。只要電容電壓小于3.5v,RST引腳便是高電平,所以理論上只要開關閉合0.1s,就足夠使單片機復位了。
單片機上電復位電路圖(五) 復位電路設計
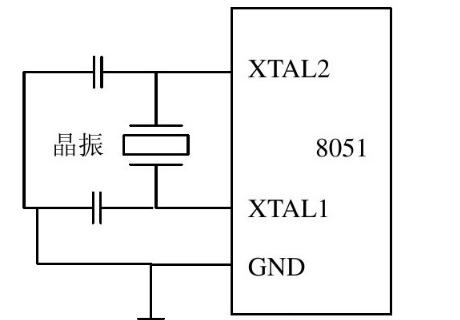
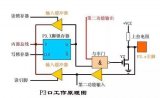
AT89S51的復位是由外部的復位電路實現的。AT89S51片內復位電路結構如圖2-17所示。

復位引腳RST通過一個施密特觸發器與復位電路相連,施密特觸發器用來抑制噪聲,在每個機器周期的S5P2:施密特觸發器的輸出電平由復位電路采樣一次,然后才能得到內部復位操作所需要的信號。
復位電路通常采用上電自動復位和按鈕復位兩種方式。
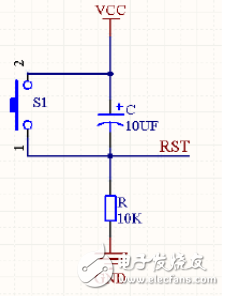
最簡單的上電自動復位電路如圖2-18所示。對于CMOS型單片機,由于在RST引腳內部有一個下拉電阻,故可將電阻R去掉,而將電容C選為10 μF。

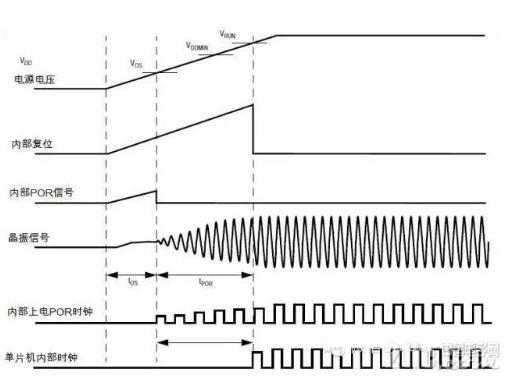
上電自動復位是通過外部復位電路給電容C充電加至RST引腳一個短的高電平信號,此信號隨著VCC對電容C的充電過程而逐漸回落,即RST引腳上的高電平持續時間取決于電容C的充電時間。因此為保證系統能可靠地復位,RST引腳上的高電平必須維持足夠長的時間。
除了上電復位外,有時還需要按鍵手動復位。按鍵手動復位有電平和脈沖兩種方式。
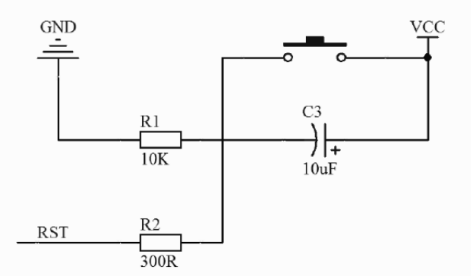
按鍵手動電平復位是通過RST端經電阻與電源Vcc接通來實現,具體電路如圖2-19所示。當時鐘頻率選用6 MHz時,C的典型取值為10μF,R取值為2kΩ。

脈沖復位是利用RC微分電路產生的正脈沖來實現的,脈沖復位電路如圖2-20所示。圖中的阻容參數適于6 MHz時鐘。

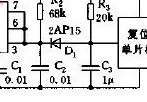
圖2-21所示電路能輸出高、低兩種電平的復位控制信號,以適應外圍I/O接口芯片所要求的不同復位電平信號。圖2-21中,74LS122為單穩電路。實驗表明,電容C選擇約為0.1μF較好。

在實際應用系統設計中,若有外部擴展的I/O接口電路也需初始復位,如果它們的復位端和AT89S51的復位端相連,復位電路中的R、C參數要受到影響,這時復位電路中的R、C參數要統一考慮,以保證可靠復位。如果AT89S51與外圍I/O接口電路的復位電路和復位時間不完全一致,使單片機初始化程序不能正常運行,外圍I/O接口電路的復位也可以不與AT89S51復位端相連,采用獨立的上電復位電路。若RC上電復位電路接施密特電路輸入端,施密特電路輸出接AT89S51和外圍電路復位端,則能使系統可靠地同步復位。一般來說,單片機的復位速度比外圍I/O接口電路快些。為保證系統可靠復位,在初始化程序中應安排一定的復位延遲時間。
單片機上電復位電路圖(六)
積分型上電復位
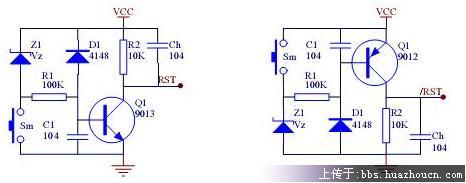
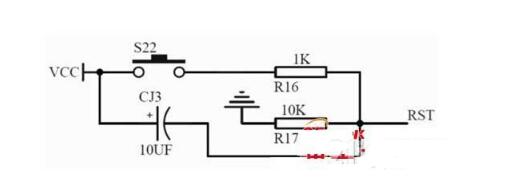
常用的上電或開關復位電路如圖3所示。上電后,由于電容C3的充電和反相門的作用,使RST持續一段時間的高電平。當單片機已在運行當中時,按下復位鍵K后松開,也能使RST為一段時間的高電平,從而實現上電或開關復位的操作。
根據實際操作的經驗,下面給出這種復位電路的電容、電阻參考值。
圖3中:C:=1uF,Rl=lk,R2=10k

專用芯片復位電路
上電復位電路 在控制系統中的作用是啟動單片機開始工作。但在電源上電以及在正常工作時電壓異常或干擾時,電源會有一些不穩定的因素,為單片機工作的穩定性可能帶來嚴重的影響。因此,在電源上電時延時輸出給芯片輸出一復位信號。上復位電路另一個作用是,*正常工作時電源電壓。若電源有異常則會進行強制復位。復位輸出腳輸出低電平需要持續三個(12/fc s)或者更多的指令周期,復位程序開始初始化芯片內部的初始狀態。等待接受輸入信號(若如遙控器的信號等)。

上電復位電路原理分析
5V電源通過MC34064的2腳輸入,1腳便可輸出一個上升沿,觸發芯片的復位腳。電解電容C13是調節復位延時時間的。當電源關斷時,電解電容C13上的殘留電荷通過D13和MC34064內部電路構成回路,釋放掉電荷。以備下次復位啟用。
單片機上電復位電路圖(七)
比較器型復位電路
比較器型復位電路的基本原理如圖8所示。上電復位時,由于組成了一個RC低通網絡,所以比較器的正相輸入端的電壓比負相端輸入電壓延遲一定時間。而比較器的負相端網絡的時間常數遠遠小于正相端RC網絡的時間常數,因此在正端電壓還沒有超過負端電壓時,比較器輸出低電平,經反相器后產生高電平。復位脈沖的寬度主要取決于正常電壓上升的速度。由于負端電壓放電回路時間常數較大,因此對電源電壓的波動不敏感。但是容易產生以下二種不利現象:(1)電源二次開關間隔太短時,復位不可靠;(2)當電源電壓中有浪涌現象時,可能在浪涌消失后不能產生復位脈沖。為此,將改進比較器重定電路,如圖9所示。這個改進電路可以消除第一種現象,并減少第二種現象的產生。為了徹底消除這二種現象,可以利用數字邏輯的方法與比較器配合,設計如圖9所示的比較器重定電路。此電路稍加改進即可作為上電復位與看門狗復位電路共同復位的電路,大大提高了復位的可靠性。

改進型比較器型復位電路
單片機上電復位電路圖(八):手動按鈕復位
手動按鈕復位需要人為在復位輸入端RST上加入高電平(圖1)。一般采用的辦法是在RST端和正電源Vcc之間接一個按鈕。當人為按下按鈕時,則Vcc的+5V電平就會直接加到RST端。手動按鈕復位的電路如所示。由于人的動作再快也會使按鈕保持接通達數十毫秒,所以,完全能夠滿足復位的時間要求。


單片機上電復位電路圖(九):看門狗型復位電路
看門狗型復位電路主要利用CPU正常工作時,定時復位計數器,使得計數器的值不超過某一值;當CPU不能正常工作時,由于計數器不能被復位,因此其計數會超過某一值,從而產生復位脈沖,使得CPU恢復正常工作狀態。典型應用的Watchdog復位電路如圖7所示。此復位電路的可靠性主要取決于軟件設計,即將定時向復位電路發出脈沖的程序放在何處。
一般設計,將此段程序放在定時器中斷服務子程序中。然而,有時這種設計仍然會引起程序走飛或工作不正常。原因主要是:當程序“走飛”發生時定時器初始化以及開中斷之后的話,這種“走飛”情況就有可能不能由Watchdog復位電路校正回來。因為定時器中斷一真在產生,即使程序不正常,Watchdog也能被正常復位。為此提出定時器加預設的設計方法。即在初始化時壓入堆棧一個地址,在此地址內執行的是一條關中斷和一條死循環語句。在所有不被程序代碼占用的地址盡可能地用子程序返回指令RET代替。這樣,當程序走飛后,其進入陷阱的可能性將大大增加。而一旦進入陷阱,定時器停止工作并且關閉中斷,從而使Watchdog復位電路會產生一個復位脈沖將CPU復位。當然這種技術用于實時性較強的控制或處理軟件中有一定的困難。

-
單片機
+關注
關注
6035文章
44554瀏覽量
634663 -
電容
+關注
關注
100文章
6036瀏覽量
150268 -
復位電路
+關注
關注
13文章
322瀏覽量
44588 -
高電平
+關注
關注
6文章
148瀏覽量
21366
發布評論請先 登錄
相關推薦
單片機復位電路的工作原理 單片機上電復位電路圖分享
淺談單片機上電復位后端口的狀態問題
如何解決AVR單片機上電復位工作混亂的問題

單片機上電復位與欠壓復位的過程解析
淺談單片機上電復位后端口的狀態
單片機上電復位后端口的狀態詳細概述

單片機上電復位電路圖資料下載

單片機基礎入門:什么是上電復位,復位電路怎么設計





 工商網監
工商網監
評論