 Mastercam后處理機器定義說明
Mastercam后處理機器定義說明
Mastercam后處理在開發5軸后處理的時候,始終繞不開的一個就是機器的定義,由于機器的結構種類繁多,各個廠家生產不同結構的5軸機器,那么在開發5軸后處理時,比如要定義機器各軸的結構類型,否則后處理無法正確的計算刀軌。
在Mastercam后處理中,5軸機器中的2個旋轉軸共分為6大類,各旋轉軸的類型如下:
旋轉軸類型:雙轉臺
#0 = Table/Table
旋轉軸類型:一轉臺一擺頭
#1 = Tilt Head/Table
旋轉軸類型:雙擺頭
#2 = Head/Head
旋轉軸類型:非正交雙轉臺
#3 = Nutator Table/Table
旋轉軸類型:非正交一轉臺一擺頭
#4 = Nutator Tilt Head/Table
旋轉軸類型:非正交雙擺頭
#5 = Nutator Head/Head
同時機器的類型有如下分類:
1:主軸平行Z軸,Z軸垂直地面,代表類型:立式機器
2:主軸平行Z軸,Y軸垂直地面,代表類型:臥式機器
3:C軸Z軸平行,Z軸平行地面,代表類型:車銑5軸類
4:其他類型 :其他類型
在開發5軸后處理時首先需要定義機器XYZ軸的結構,只有3個基礎軸確定了,才能夠定義2個旋轉軸的旋轉方向及旋轉軸。
機器基礎軸的定義函數:
matb1$-matb9$
由于機器有3個基礎軸,每個基礎軸有存在多種形式,所有機器的基礎軸同樣采用了一個3x3的矩陣來定義及體現機器的3個基礎軸的各種類型。
3x3矩陣中,每一行代表著一個基礎軸,如下:
matb1$–matb3$:表示X軸,即Xx,Xx,Xzmatb4$–matb6$:表示Y軸,即Yx,Yy,Yzmatb7$–matb9$:表示Z軸,即Zx,Zy,Zz
如下圖所示:
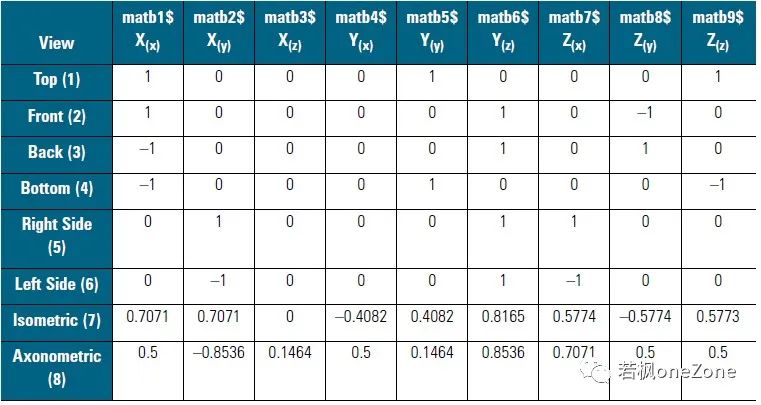
由上表可以看出通過3x3矩陣的方式可以定義出任何結構的形式機器。
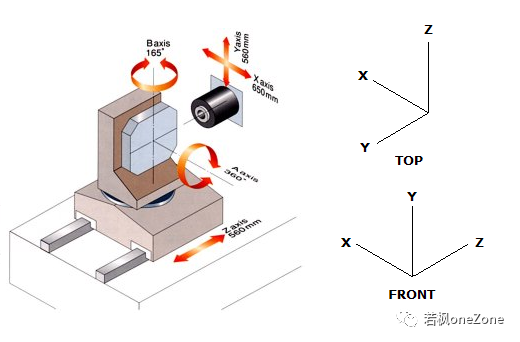
那么如何定義機器的3個基礎軸,如下圖機器的機構,首先通過右側的坐標系可以判斷機器的類型為臥式機器(Front),因此,通過上圖可以看出臥式機器的定義如下:
matb1$ : 1
matb2$ : 0
matb3$ : 0
matb4$ : 0
matb5$ : 0
matb6$ : 1
matb7$ : 0
matb8$ : -1
matb9$ : 0
最終的定義如下:
# --------------------------------------------------------------------------
# Machine settings
# --------------------------------------------------------------------------
#Machine base matrix (Base to map positions into)
#Base is relative 2 WCS# T S F B
matb1$ : 1 # 1 0 1 0 Enter base?
matb2$ : 0 # 0 1 0 -1 Enter base?
matb3$ : 0 # 0 0 0 0 Enter base?
matb4$ : 0 # 0 0 0 0 Enter base?
matb5$ : 0 # 1 0 0 0 Enter base?
matb6$ : 1 # 0 1 1 1 Enter base?
matb7$ : 0 # 0 1 0 -1 Enter base?
matb8$ : -1 # 0 0 -1 0 Enter base?
matb9$ : 0 # 1 0 0 0 Enter base?
3個基礎軸定義好了之后,就可以定義2個旋轉軸.
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
處理器
+關注
關注
68文章
19265瀏覽量
229671 -
WCSP
+關注
關注
0文章
15瀏覽量
3887
發布評論請先 登錄
相關推薦
危險品處理機器人控制電路設計 —電路圖天天讀(47)
本文首先簡要介紹了危險品危險品處理機器人的作用,機械手的結構形式,著重從控制系統、硬件設計和軟件設計3 個方面介紹了危險品處理機器人機械手控制系統的設計與實現。最后給出了實驗測得的機械手的各項技術指標。
發表于 11-17 11:49
?1829次閱讀
Mastercam 2025 官方電腦配置推薦
Windows 11。
2、CPU處理器
處理器的速度將影響軟件計算和完成任務的速度。隨著每個發行版本,Mastercam 提供越來越多的功能以支持多核處理器。使用多核
發表于 12-20 12:33
一種柔性圖像并行處理機
一種柔性圖像并行處理機摘 要:探討了多指令流多數據流圖像并行處理拓撲結構,設計了一種具有柔性結構的圖像并行處理機。分析比較了柔性圖像并行處理機與典型圖像并行
發表于 10-06 08:57
linux處理機調度與死鎖
linux處理機調度與死鎖
掌握處理機的三級調度
掌握作業調度及進程調度的概念
理解調度算法的評價準則
掌握并靈活運用常用的幾種作業調度、
發表于 04-28 14:59
?0次下載
MasterCAM后處理文件應用
CAD/CAM技術的發展,使得在數控加工中直接利用CAD的設計數據成為可能,特別是DNC系統微機與數控機床的聯接,使得設計、工藝規劃及編程的整個過程全部在計算機上完成,一般不需
發表于 09-11 17:03
?0次下載
基于自定義架構的局部處理機
針對企業生產過程中存在大量原始數據需要實時處理的問題,設計并實現了一個基于自定義架構的局部處理機。在設計之初以Hadoop的并行架構為參考,對MapReduce的工作原理和緩存方式進行了分析
發表于 01-10 16:18
?0次下載
解析PCB電鍍后處理的12類處理方法工藝
完整的PCB電鍍工藝包括電鍍的后處理,廣義地說,所有電鍍層在完成電鍍以后都要進行后處理。最簡單的后處理包括最簡單的后處理包括熱水清洗和干燥。而許多鍍層還要求有鈍化、著色、染色、封閉、涂
使用Python的焊接后處理的詳細說明
后處理是數值計算的關鍵技術之一,是分析數值模型結果以及預測焊接結構和工藝的重要步驟。采用合理方法和思路,才能很好的實現后處理功能。 MSC. Marc提供了 Pvpost后處理函數接口,充分體現了
發表于 10-20 16:16
?6次下載

為大家帶來后處理尿素泵針腳定義總結
隨著排放法規的升級,越來越多的車輛配備尿素后處理系統。本期小編為大家帶來后處理尿素泵針腳定義總結,希望師傅們認真閱讀,收藏,轉發起來!
出保的車后處理有問題該怎么辦?
? ? 總有些師傅認為出保的車,后處理有問題,更換新的后處理配件,成本很高。所以后處理出問題以后寧愿去屏蔽后處理,甚至為了貪圖便宜加一些惡劣尿素。那么這么做真的省錢了嗎?和修





 工商網監
工商網監
評論