


一,邏輯門電路
我們在設計數字電路時,都希望器件的功耗低、速度快并且封裝(器件價格)便宜。但這如同所有的“神秘三角”一樣,是不可兼得的。所有的邏輯器件都是在權衡了功耗、速度和封裝之后的折衷方案:
——“神秘三角”有項目的管理三角:范圍、時間和成本;病毒三角:傳染性、毒性和適應性(新冠病毒之所以沒有滅絕人類,就是因為它受到了這“神秘三角”的約束);等。
- 標準封裝在制造時節省了費用,但降低了器件的靈活性;
- 標準封裝限制了每個封裝單元內的門電路和管腳數量,迫使設計者將大的系統拆分成多個器件;
——器件之間的信號連接響應明顯比同一封裝內信號要慢,所需的功率更大;即,使得系統的性能降低,功耗增加。
- 標準的封裝結構限定了器件所允許的最大散熱能力,如果要改進封裝的散熱能力,則需要花費額外的成本;
- 隨著芯片制造工藝的改進,每個邏輯單元尺寸變的更小,在相同的封裝內可以集成更多的門電路數量;高密度的封裝有助于降低產品尺寸和組裝成本,但這意味著需要更大的單位面積散熱的能力;
——每個封裝所允許的最大散熱功耗限定了封裝內的門電路數量。
- 高速器件通常消耗更大的功率,速度和功率在一定程度上可以相互對應;所以封裝的最大散熱功耗,也稱為了高速的限制因素。
——在相同制造工藝下,速度越高的器件功耗會越大。
所以對于邏輯門電路高速特性,我們主要考慮如下三個方面:
- 功耗:分為靜態功耗和 動態功耗 ;
- 速度:
1, 理論上:數字邏輯的設計重點是關注 邏輯門電路的傳輸延時 ;
2, 實際上:通常取決于 最小輸出轉換時間(邊沿時間) 。
——較快的轉換時間會導致回流,串擾和振鈴等與傳輸延時無關的問題倍增。
- 封裝,對于任何高速器件封裝都會引入:管腳寄生電感、寄生電容以及散熱的問題。
二,功耗
我們想要知道一個邏輯器件的功耗,一般會查看其數據手冊上的典型電流值Icc,但這并非是器件的實際功耗,或則說在一些條件下器件的功耗會遠大于標稱的Icc電流值。舉個栗子:常用的16位驅動器74LVTH16245,如果16個輸出管腳同時快速翻轉,那么其實際功耗應該會遠超規格書中的Icc,如下圖所示。

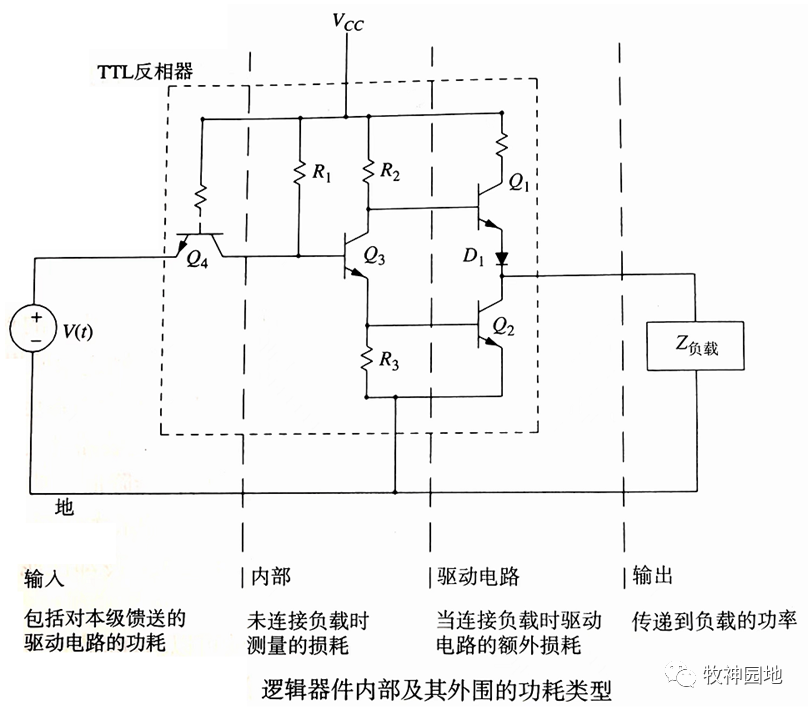
如下圖所示,為一個簡單的TTL反相器的內部邏輯結構,從功耗角度分為4部分:
——如下每一種功耗都可以進一步細分為:靜態功耗和動態功耗。
- 輸入功耗;
- 內部功耗;
- 驅動電路功耗;
- 輸出功耗。
1,靜態功耗和動態功耗
這里非常重要的概念是:靜態功耗和動態功耗。我們所有的功耗都可以將它分為這兩部分。
靜態功耗:指邏輯電路保持一個邏輯狀態時消耗的功率。靜態功耗可以由每個阻性單元兩端電壓V和電流I的乘積計算所得(P靜態 = V*I),并且求和得到總功率,這是在沒有負載情況下的靜態功耗(即數據手冊上看到的Icc標稱值)。
——需要強調的是:靜態功耗是不計負載損耗的器件自身功耗。
但實際上邏輯電路不跳變則無法傳遞信息,也就成了無用之物,我們需要器件“動”起來,那么器件就要消耗超過它正常靜態功耗之外的“額外功率”。當這個變化很有節奏時,舉個栗子:以時鐘信號頻率跳變;那么:動態功耗 = 周期頻率* 每個周期額外的功率。
——動態損耗最常見的原因:負載電容(RC充電)和偏置電流。
如下圖所示為驅動一個容性負載時的情形:

- t1時刻電路開關A閉合(B斷開):負載電容充電至Vcc,在電容充電時電流流過驅動電阻“R充電”,有功率消耗;
- t2時刻電路開關B閉合(A斷開):負載電容通過電阻“R放電”進行放電,電流流過驅動電阻,也有功率消耗;
- t1和t2之間有一個“死區時間”(A和B都斷開):此死區時間是為了防止電源Vcc直接通過開關短路到GND,造成器件損耗增加,甚至燒壞內部開關。
——該“死區時間”的原理同開關電源,在邏輯門電路中,其主要影響器件的功耗和電平切換速率(I/O管腳支持的最大速率)。
那么一個電壓源通過電阻R對容性負載C充電或放電時,是如何計算它的功耗呢?
- 胖友們已經知道電容是一個儲能元件,并不會耗電,所以在容性負載充放電過程中不會耗電;
——如果有胖友還對這個問題有疑問:電容器有ESR,有寄生電阻呀等等;建議再回顧《阻容感基礎01》中的內容,另外我想說的是:我們要區分電容與電容器這兩個概念;電容是指容性,而電容器是指具體的器件,對于容性本身來說,它是不會造成電能的損耗,而造成損耗的是阻性。
- 我們來考慮RC充/放電電路中電阻R的能量消耗,有如下兩個計算方法:
1, 直接計算電阻R在充電RC充電電路中的功耗:P = I2 * R,由于電流并非線性的,而是指數函數:(U/R)*exp(-t/τ);所以需要用到積分公式來進行計算,具體計算如下:

RC放電電路是充電的反向過程,同理其消耗在電阻R上的功耗也為(1/2)* CV2cc;所以充放電的總功耗為:P = CV2cc;
——指數函數的積分(面積)是1(即指數函數積分從-至x的積分值就是其本身,t 是-∞至0,那么可得積分為e?= 1),具體請參考《傳遞函數和波特圖》的“說在開頭”章節關于自然常數e的描述。
2, 將RC電路看成一個整體,同時將充電和放電看成一個整體;那么器件給R/C充電的總能量,就等于RC充電和RC放電兩個過程中總共消耗的能量;電源消耗總能量:P = VccIt = VccQ = Vcc Vcc C = C V2cc;
——電源總能量是指器件Vcc通過“R充電”給容性負載C充電,然后由容性負載C通過“R放電”釋放掉的總電能量;經過整個充電和放電過程,容性負載上并無能量儲存,所以所有的能量都被電阻所消耗,即,我們可認為Vcc釋放出來的能量都消耗在了電阻上。
3, 所以我們得到結論:對于恒壓電源充電 / 放電電路來說 ,不管串接的電阻R阻值是多少,每個充電周期消耗掉的能量是總電源能量的一半:(1/2)* CV2cc;而整個充放電周期(管腳輸出一個時鐘周期)消耗的能量是:C V2cc。
- 如果器件管腳以f Hz頻率循環工作,那么驅動電路的功率為:f * C* V2cc。
——舉個栗子:輸出10MHz時鐘信號,負載電容為10pF,電壓為3.3V,那么驅動功率:1010?Hz1010?12F3.33.3V2 ≈ 1.110?3W = 1.1mW;這么一算單個管腳的功耗還是比較小的;但這只考慮了理想情況,后續還有跟個詳細的分析。
2,疊加偏置電流的動態功耗
如上圖TTL反相器的輸出驅動電路在H(高電平)和L(低電平)之間較低轉換,Q1和Q2交替處于導通狀態,而非兩者同時導通;這種電路配置有兩個激勵電路:一個把輸出電壓上拉到H,另一個將輸出電壓下拉到L,通常稱之為推挽輸出電路。TTL和CMOS都有推挽輸出,如下左圖為CMO推挽式輸出電路。
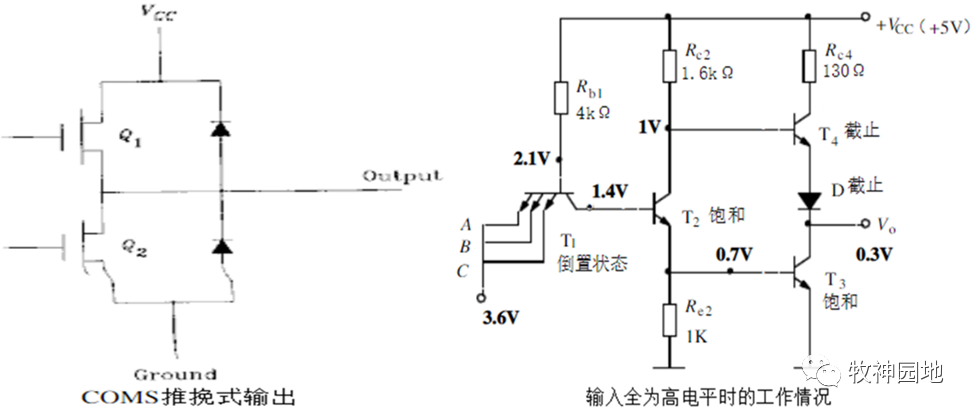
TTL推挽式輸出結構工作原理如上右圖所示,結構中各個器件的作用如下:
- 二極管D保證了在T2和T3全飽和時,輸出電平鉗位輸出是低電平,防止T3和T4同時導通產生大的交越電流;
——所有推挽式輸出電路都需要有保護電路,防止高驅動和低驅動電路同時導通。
- 如果輸入電平轉換很快時,每個周期都有一個交越電流并消耗一定的功耗(如下圖所示),交越電流產生的額外功耗與轉換速率成正比;
——對于一個快速的輸入轉換,重疊電流脈沖的大小和波形在每個周期都是一致的,并且每個周期消耗的能量也相同,所以這部分額外功耗與轉換速率成正比,與容性負載導致的功耗不同:交越電流產生的功耗并不隨電源電壓的平方增加。
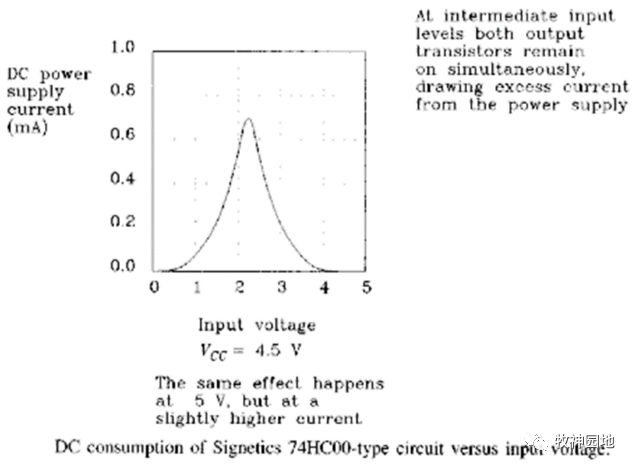
- 減緩輸入信號邊沿,會導致交越時間延長;如上圖為門電路典型直流電源電流與輸入電壓的函數關系曲線。
——減緩輸入電壓的轉換時間往往會延長交越時間,導致T3和T4同時導通的電壓附近停留的時間會更長,所以很多器件會對輸入信號邊沿時間有要求。
- 對于TTL電路來說,交越效應相比CMOS更顯著;如果將一個TTL反相器的輸入端與其輸出端相連,會產生自我偏置,從而進入交越范圍內,消耗大量能量。
——因此TTL電路不適合用作線性的小信號處理器(如:振蕩器),因為它們在線性工作狀態是要消耗額外的能量。
3,輸入功耗
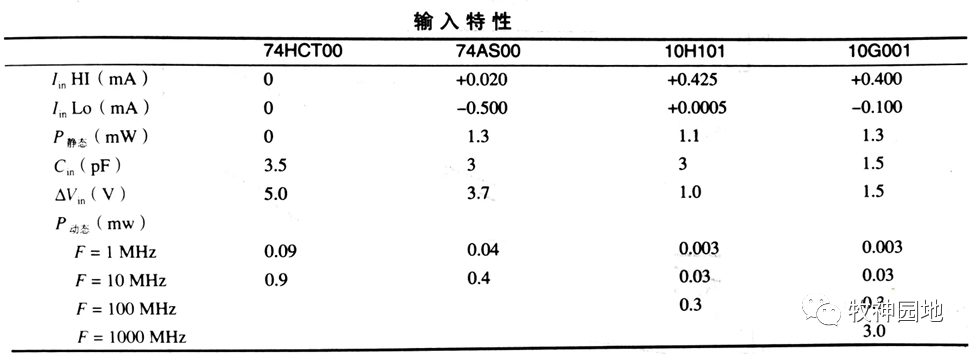
芯片的輸入功耗,來自于輸出器件,并由它來激活輸入電路。對于輸入電路的偏置和觸發來說是必需的。如下表對比了4種不同邏輯器件的靜態和動態輸入特性:
- 靜態輸入功耗:驅動電壓和輸入電流的乘積;它包含了接收邏輯器件內部功耗和驅動器的功耗之和。
- 動態輸入功耗:需要計算輸入電容、典型供電電壓和工作頻率代入公式:功率 = f * C*V2cc;計算出電路驅動該輸入時的總功耗。
——這些功耗相對比較小,只有較大數量扇出(Fanout)或系統要求在極低功耗運行時,才能體現其重要性。
4,內部功耗
內部功耗是指邏輯器件內部偏置電流和內部邏輯翻轉的功耗,包括靜態和動態功耗。
- 靜態內部功耗:是指在無負載驅動、輸入端處于隨機狀態條件下的功耗,是所有輸入狀態(高/低/高阻)下的平均值;
- 動態內部功耗:是指內部動態耗散常數“K動態”是在輸出懸空,預設輸入頻率為時測量得到總功率P總,而后計算動態功耗常數: K動態 = (P總 – P靜態)/f ;
——動態常數K動態表示周期頻率每增加1Hz將額外消耗的功率。
- 計算任意頻率下的總功耗:總 = P靜態 + f*K動態。
——動態頻率在相對較頻率(>10MHz)時才會比較明顯。
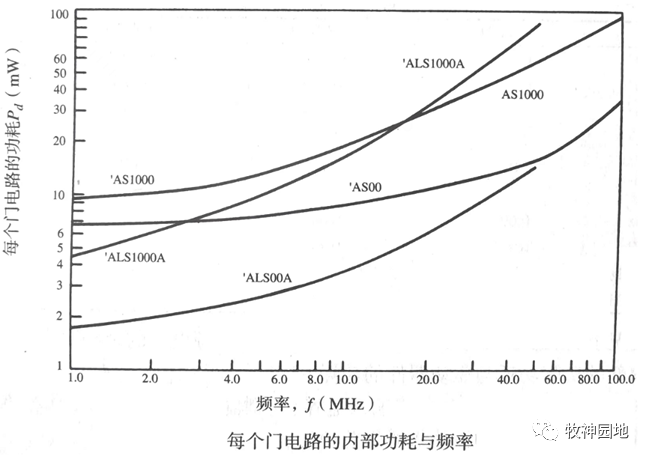
在非常寬的頻率范圍內,CMOS器件的內部功耗和周期頻率呈明顯的線性關系,這是因為CMOS電路的內部靜態功耗非常低;而TTL器件由于內部靜態功耗較大,所以直到工作頻率接近器件的最大工作頻率時才呈現出線性關系。如下圖所示為不同類型TTL邏輯器件的門電路內部功耗與工作頻率的關系曲線:
- 在10MHz以上:動態功耗遠大于靜態功耗,總功耗曲線幾乎與頻率成正比;
- 在1MHz以下:動態功耗小于靜態功耗,總功耗曲線相對于頻率是平坦的。
CMOS器件數據手冊用等效電容Cpd來表示內部功耗,CMOS內部功耗 = Cpd * V2 * f。可得到CMOS器件功耗的關聯因素:
- 與管腳工作頻率和負載電容成正比;
1,器件工作頻率越來越高,是整個行業的發展方向,所以不能以降低管腳工作頻率為代價來減小器件功耗;
2,負載電容與器件封裝技術相關,器件小型化是發展趨勢,但負載電容不能無限制地減小,需要付出更多的成本代價。
- 與I/O工作電壓的平方成正比。
——減小I/O工作電壓對功耗影響非常大(平方正比關系),是最明確可行的方案,舉個栗子:I/O電壓從5V減小至1V,那么功耗將減小至1/25;所以我們看到器件工作電壓是越來越小的趨勢。
5,驅動電路功耗
邏輯器件中的主要能量消耗在輸出驅動電路上,而驅動電路功耗由:輸出電路的結構、邏輯電平、輸出負載以及運行速度決定。我們主要考慮2種輸出結構:
- 推挽電路輸出;
- 射極跟隨器輸出;
5.1 推挽電路輸出
如下左圖所示為理想TTL驅動器在H(高電平)和L(低電平)狀態下的靜態功耗,對于標準TTL器件來說Q2處于飽和狀態(低電平)時的壓降VL固定在大約0.3V;在高電平H狀態下,壓降由Q1的VBE和正向偏置二極管D1鉗位(Vcc - VHI),約為1.4V。此時TTL驅動電流電路總靜態功耗平均值近似為:P靜態 = (0.3I灌+1.4I源)/2。
——此時Q1不會進入飽和狀態,因為其B極電壓不會上升到高于它C極電壓(三極管飽和狀態判斷,具體參考《三極管原基礎》相關章節)。
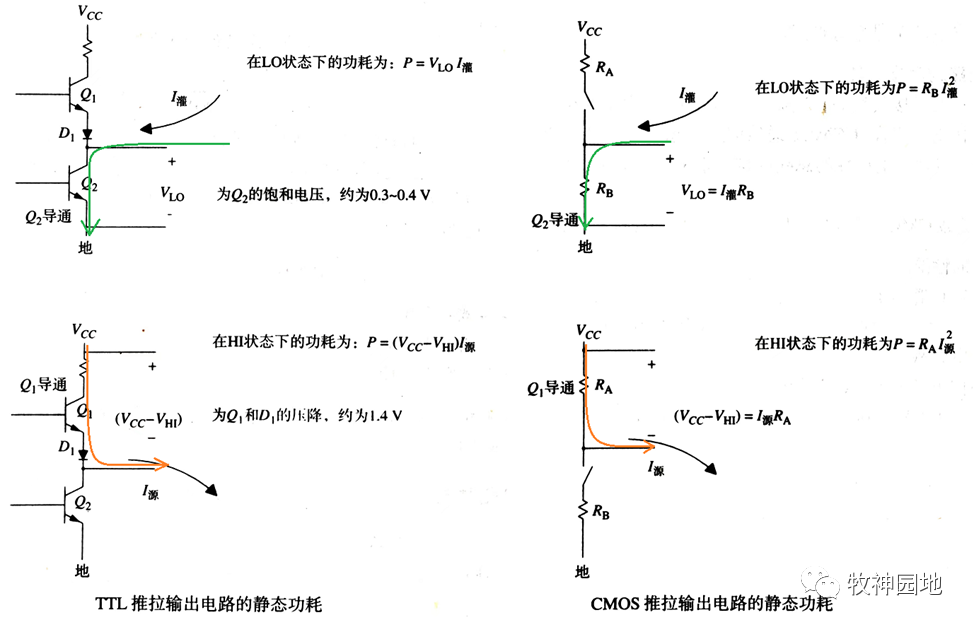
如上右圖所示為CMOS驅動器電路,MOS管的導通壓降很低,通常等效串聯了上拉和下拉電阻;所以CMOS驅動器在高電平和低電平狀態下的靜態功耗:P靜態 = (RbI2灌+RaI2源)/2。
——舉個栗子:某器件VOL(Io = 4mA),25℃時典型值為0.15V,最大值為0.33V;某器件VOH(Io = -4mA),25℃時典型值為4.32V,最大值為3.48V;那么根據R = V/I,可計算Ra的阻抗范圍是:37Ω83Ω;Rb的阻抗范圍是:45Ω165Ω。在不同電源電壓下,CMOS驅動器的輸出電阻變化很大。
推挽電路輸出負載能力,如果只按照所接負載直流輸入要求進行計算,使輸出負載能力達到它的直流最大扇出,特別是CMOS總線理論上的扇出能力是無限的;重負載的總線結構會帶來兩個問題:
- 邊沿時間會變緩;
- 驅動器功耗增大。
輸出總負載電容為:器件管腳寄生電容(10pf/pin)+PCB走線寄生電容(2pf/in)。舉個栗子:我們有20個負載和10in長度的PCB走線,那么總電容 = 負載電容+走線電容 = 2010pf/pin + 10in 2pf/in = 220pF;此時信號邊沿時間會變緩以及線路延遲會非常大。充電時間常數約等于驅動器輸出電阻乘以輸出負載電容,Trc = RC = 110Ω 220pF = 24ns(假設總線驅動器輸出電阻為110Ω)。
——充電時間常數是指:電容從0充電至0.63Vcc所需的時間,升至高電平90%所需時間是Trc的兩倍多:T10-90 = 2.2Trc = 53ns。
計算推挽電路動態輸出功耗:f * C* V2cc;假設最差供電電壓為5.5V,負載電容如上所述為220pF,信號線輸出頻率為10MHz,那么可得每個驅動器的功耗:1010?Hz22010?12F5.5V2 ≈ 0.067W,如果這是一個16bit的驅動器,那么同時翻轉產生的器件總功耗:P總 = 16*0.067w ≈ 1.1W。而且當上升時間緩慢時,驅動器的功耗會更高。
5.2 射極跟隨器(ECL)電路輸出
如下圖所示為ECL射極跟隨器輸出電路,該電路在HI(高電平)和LO(低電平)兩個狀態下都有電流流過。HI(高電平)和LO(低電平)輸出電壓都是相近的,這些器件一般用-5.2V電源供電,高電平VHI= -0.9V,低電平VLO = -1.7V;同時射極耦合邏輯電路需要有一個上拉電阻R,用于端接至Vt = -5.2V或中間電壓 -2.0V(戴維南匹配,具體參考《反射與阻抗匹配》),那么可得輸出電路的靜態功耗:
P靜態 = (1/2) [(Vcc-Vhi) (Vhi-Vt)+(Vcc-Vlo)*(Vol-Vt)]/R
其中,Vcc =0V,VHI= -0.9V,VLO = -1.7V, Vt = -5.2V;那么計算可得:P靜態 = 4.91/R。
同樣,如果將R下拉至-2.0V時,可以計算得到:P靜態 = 0.75/R。
那么我們可以得到:對于相同的電阻值R,使用中間電壓(-2.0V)端接時表現出明顯的功耗優勢;這是因為當電源電壓被下拉到-2.0V時,下拉電阻汲取的電流比較小(意味著低功耗)。
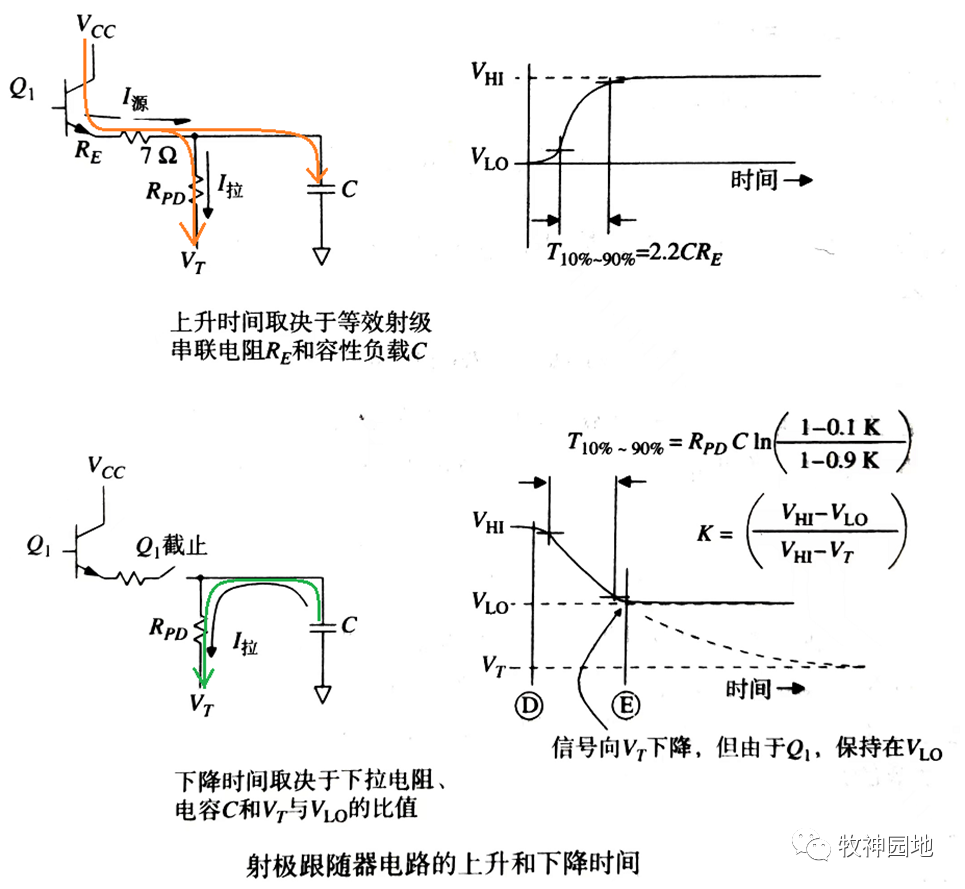
- 如上圖所示,當晶體管Q1導通(信號上升沿),電流從晶體管輸出流向下拉電阻Rpd和容性負載;由于Rpd相對于Re更大,Rpd的下拉電流相對于Re輸出的I源電流可以忽略不計,所以輸出電壓上升時間不受下拉電流的影響;
——上圖中給出Re = 7Ω,當給容性負載C充電時,其充電時間常數為:Trc = Re* C;而充電至90%所需的時間為T10-90 = 2.2*Trc。
- 當晶體管Q1截止(信號下降沿),從而不再有電流流過發射極;只有容性負載C通過下拉電阻Rpd放電:下降時間與電容C放電的速度成正比,功耗與靜態下拉電流成正比;此時需要有一個大電流迅速地將電容C放電;
——如果Q1完全截止(忽略其漏電流),從90%-10%的下降時間為:T90-10 = RpdCln[(1-0.1K)/(1-0.9K)];其中常數K = (Vhi-Vlo)/(Vhi-Vi);如上面栗子參數(Vt = -5.2V),可計算K = 0.186, T90-10 = 0.164RpdC。若Vt = -2.0V,那么計算K = 0.727,T90-10 = 0.987RpdC。
- 當Vt = -2.0V時雖然功耗相對較小,但是邊沿時間會更長,為了達到相同的相同時間,必須要求所采用的下拉電阻相比于Vt = -5.2V電阻的阻值更小,而一旦選擇了較小的電阻,其兩種匹配方式的功耗數也大致相等。
——同時考慮其它方面:1,采用Vt = -5.2V不需要引入單獨的新電源;2,采用Vt = -2.0V時下拉電阻范圍在50100Ω,正好可以作為線路的終端匹配(阻抗匹配),而Vt = -5.2V時端接電阻在330680Ω,不適合做終端匹配(關于終端匹配相關知識參考:《反射與阻抗匹配》章節內容)。
- ECL輸出電路相對于推挽輸出電路的好處是:
1, 由于電壓擺幅小,所以電路動態功耗非常小(下拉電阻產生的損耗);
2, 沒有推挽輸出電路的高低電平切換“死區時間”,切換的速率更快,且無額外損耗。
-
驅動器
+關注
關注
54文章
8699瀏覽量
150110 -
邏輯電路
+關注
關注
13文章
502瀏覽量
43369 -
TTL反相器
+關注
關注
0文章
6瀏覽量
7138 -
RC充電
+關注
關注
0文章
3瀏覽量
5157 -
GND
+關注
關注
2文章
545瀏覽量
39861
發布評論請先 登錄





 工商網監
工商網監

評論