") 異步電機(jī)速度估計(jì)之直接計(jì)算法
異步電機(jī)速度估計(jì)之直接計(jì)算法
導(dǎo)讀:異步電機(jī)速度估計(jì)的方法主要分為兩大類:模型法和基于非理想特性的方法。本期文章介紹的是直接計(jì)算法(動(dòng)態(tài)速度估計(jì)器),這種方法屬于模型法中的開環(huán)速度估計(jì)。
如果需要文中的仿真模型,關(guān)注微信公眾號(hào):淺談電機(jī)控制,留言獲取。
異步電機(jī)矢量控制系統(tǒng)中,轉(zhuǎn)速的閉環(huán)控制必不可少,其是保證控制穩(wěn)定性和控制性能的保證。矢量控制從其獲取速度的不同方法來分,可以分為有速度傳感器和無速度傳感器兩大類。一般早期的異步電機(jī)矢量控制常采用光電碼盤等速度傳感器來進(jìn)行轉(zhuǎn)速的直接檢測,并反饋被測電機(jī)的轉(zhuǎn)速信號(hào)。但額外的速度傳感器不僅會(huì)增加系統(tǒng)的成本,其次如果傳感器安裝不當(dāng)也易影響測速精度,而且傳感器的安裝還會(huì)使電機(jī)軸向上體積增大,給電機(jī)的日常維護(hù)帶來一定困難,并且速度傳感器還會(huì)降低電機(jī)的機(jī)械魯棒性,在高溫、高濕環(huán)境下傳感器精度也會(huì)受到影響.基于這些不足,為了克服上述問題人們開始研究無速度傳感器矢量控制方法。
本文著眼于無速度傳感器矢量控制系統(tǒng)的研究,重點(diǎn)在于講解異步電機(jī)無速度傳感器矢量控制系統(tǒng)的實(shí)現(xiàn),井給出一些控制系統(tǒng)框圖進(jìn)行試驗(yàn)仿真,接下來就無速度傳感器矢量控制方法速度估計(jì)的一些方法介紹(本期重點(diǎn)先講解動(dòng)態(tài)轉(zhuǎn)速估計(jì)器)。
一、動(dòng)態(tài)轉(zhuǎn)速估計(jì)器介紹
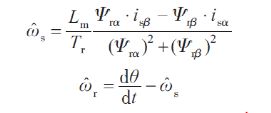
動(dòng)態(tài)轉(zhuǎn)速估計(jì)器是以電機(jī)的動(dòng)態(tài)派克方程為基礎(chǔ)進(jìn)行推導(dǎo),分別由電機(jī)的電磁關(guān)系及轉(zhuǎn)速的定義數(shù)學(xué)方程式中得到關(guān)于轉(zhuǎn)差或轉(zhuǎn)速關(guān)系的表達(dá)式,其推導(dǎo)方法具體可以從以下三個(gè)方面入手:
(1)轉(zhuǎn)子磁場定向控制入手求解電機(jī)的角速度;
(2)定子磁場定向控制方程求解角速度;
(3)電機(jī)方程直接推導(dǎo)角速度;
本文介紹的是一種常用的異步電機(jī)動(dòng)態(tài)轉(zhuǎn)速估計(jì)器方案是磁鏈閉環(huán)估算,速度開環(huán)計(jì)算。
二、仿真系統(tǒng)搭建
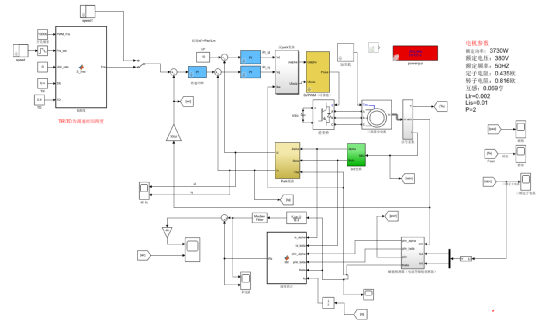
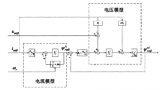
圖1 異步電機(jī)無速度傳感器矢量控制系統(tǒng)仿真
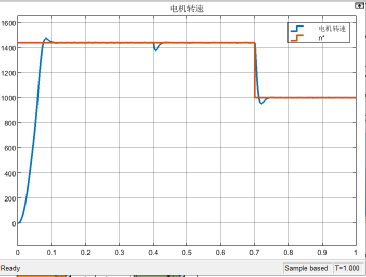
圖2 異步電機(jī)無速度傳感器矢量控制系統(tǒng)仿真波形變化情況
從圖2可以發(fā)現(xiàn),速度估計(jì)的波形在突加載和速度變化的時(shí)候都能很好的跟蹤上給定值,證明該估計(jì)方法的可行性和有效性。
三、總結(jié)
第一節(jié)介紹的三種角速度的估算方法,具有直觀性強(qiáng)、速度的計(jì)算理論上沒有延時(shí), 但這種動(dòng)態(tài)轉(zhuǎn)速估計(jì)的缺點(diǎn)也是十分突出。其缺點(diǎn)具體表現(xiàn)在,該方法計(jì)算中包含磁通量的計(jì)算,因此電機(jī)磁通的觀測與控制好壞直接影響電機(jī)轉(zhuǎn)子轉(zhuǎn)速估計(jì)的精度.其次,由其計(jì)算方程式可以看出方程中包含了大量電動(dòng)機(jī)參數(shù),但由于交流異步電機(jī)是個(gè)非線性系統(tǒng),其電機(jī)參數(shù)會(huì)隨著電機(jī)使用時(shí)間,溫度、濕度,及供電頻率等因素的影響而發(fā)生變化.為了解決電機(jī)參數(shù)變化的影響, 常需要在電機(jī)控制系統(tǒng)中加上參數(shù)的辨識(shí)環(huán)節(jié),但是額外的參數(shù)辨識(shí)環(huán)節(jié)會(huì)使系統(tǒng)過于復(fù)雜,且辨識(shí)過程的延時(shí)十分的嚴(yán)重,但若不加上辨識(shí)環(huán)節(jié),則會(huì)使計(jì)算精度受到影響.再次由于動(dòng)態(tài)轉(zhuǎn)速估計(jì)器是從電機(jī)方程式入手求解角速度的,但電機(jī)的非線性性,會(huì)使電機(jī)速度隨時(shí)發(fā)生變化,而由于動(dòng)態(tài)估計(jì)器估計(jì)電機(jī)速度的方法缺少誤差校正環(huán)節(jié),所以難以保證系統(tǒng)的抗干擾性能,從而導(dǎo)致系統(tǒng)不穩(wěn)定的運(yùn)行情況.總之,如何有效的進(jìn)行電機(jī)參數(shù)辨識(shí),以及利用誤差校正環(huán)節(jié)來提高系統(tǒng)速度估計(jì)的抗干擾能力,是動(dòng)態(tài)轉(zhuǎn)速估計(jì)器方法需要進(jìn)一步研究的方向.
-
傳感器
+關(guān)注
關(guān)注
2557文章
51729瀏覽量
758816 -
算法
+關(guān)注
關(guān)注
23文章
4646瀏覽量
93717 -
異步電機(jī)
+關(guān)注
關(guān)注
6文章
428瀏覽量
33015
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于SVM改進(jìn)的異步電機(jī)直接轉(zhuǎn)矩控制系統(tǒng)設(shè)計(jì)
異步電機(jī)速度估計(jì)方法之直接計(jì)算法
異步電機(jī)的無速度傳感矢量控制設(shè)計(jì)
基于遺傳算法的異步電機(jī)
異步電機(jī)直接轉(zhuǎn)矩控制simulink仿真教程
基于EKF的異步電機(jī)直接轉(zhuǎn)矩控制系統(tǒng)
異步電機(jī)無速度傳感器直接轉(zhuǎn)矩控制系統(tǒng)研究
異步電機(jī)速度估計(jì)學(xué)習(xí)
異步電機(jī)直接轉(zhuǎn)矩控制simulink仿真

異步電機(jī)控制筆記
異步電機(jī)矢量控制之磁通估計(jì)器
異步電機(jī)速度估計(jì)-混合模型磁鏈觀測器法
異步電機(jī)速度估計(jì)-直接計(jì)算法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論