 全面講解系統診斷管理模塊設計
全面講解系統診斷管理模塊設計
1.診斷故障基礎
當人患了疾病,便需要醫治,醫生根據各種檢驗結果找出病因,并得出診治策略。當汽車出現故障時,DTC故障碼就等同于“檢驗結果”,汽車工程師通過該標識碼便可以查表的方式獲得該故障信息,如故障觸發條件、故障解除條件、系統功能表現等,得出解決該故障的策略。 DTC(DiagnosticTrouble Code)顧名思義診斷故障碼,一種用來記錄當ECU發生或者檢測到某種故障時呈現給大家的標識碼。
1.1 DTC的組成
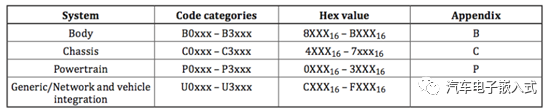
DTC故障碼是一個4個字節的標識符,由以下兩部分組成:DTC Catogory與Failure Type,其中DTC Catogory 又可以根據Powertrain、Body、Chasis、N etwork四大子系統來進一步定義其范圍,簡稱PBCU四大子系統,如下表所示:
1.2 DTC的意義
故障碼有以下兩點意義:
1)產線下線檢測:一輛車的零部件的開發,系統集成,整車組裝,其中涉及的流程之長,零部件數量之多,可以說是相當復雜。為了產線生產的車能正常下線,安全上路,就需要確保在車輛下線前,各零部件本身以及零部件相互配合是沒有問題的。因此在產線電檢流程中,會讀取整車故障碼,通過故障碼說明車輛是否正常。
2)車輛維修:當車輛出故障時,維修工程師是如何快速定位到故障零部件呢?車輛是由上萬個零部件組成,如果依賴于維修工程根據經驗慢慢排查,效率會極其低下。因此,維修工程師會使用診斷儀讀取整車故障碼,并將故障碼與故障現象對照,快速得出維修策略。
1.3 DTC故障類型
以非排放相關的ECU為例,可以將DTC故障類型分為以下幾個部分:
硬件故障:如RAM、Flash、CPU時鐘等硬件本身失效的問題
軟件故障:如配置字故障,標定故障或客戶定義的軟件功能性故障
外部環境故障:電壓過高或者欠壓、環境溫度過高或過低等
通訊相關故障:如報文丟失、信號無效,Checksum/Rolling 障等
1.4DTC狀態位介紹
每個DTC都有一個字節用來表示該故障的狀態,這個字節中每個bit的含義如下:
| status Of DTC: bit field name | Bit | Bit state | Description |
| testFailed | 0 | 0 | DTC is not failed at the time of the request |
| testFailedThisOperationCycle | 1 | 0 | DTC failed during the current operation cycle |
| pendingDTC | 2 | 0 |
DTC was not failed on the current or previous operation cycle |
| confirmedDTC | 3 | 0 | DTC is not confirmed at the time of the request |
| testNotCompletedSinceLastClear | 4 | 0 | DTC test was completed since the last code clear |
| testFailedSinceLastClear | 5 | 0 | DTC test never failed since last code clear |
| testNotCompletedThisOperationCycle | 6 | 0 | DTC test completed this operation cycle |
| warningIndicatorRequested | 7 | 0 | Server is not requesting warningIndicator to beactive |
具體解釋如下: Bit0:請求時刻測試結果為失敗; Bit1:在當前點火循環至少失敗過1次;
Bit2:在當前或者上一個點火循環測試結果不為失敗;
Bit3:請求時刻DTC被確認,一般確認是在一個點火周期內發生錯誤1次;
Bit4:自上次清除DTC之后測試結果已完成,即測試結果為PASS或者FAIL結果;
Bit5:自上次清除DTC后測試結果都不是FAIL;
Bit6:在當前點火周期內測試結果已完成,即為PASS或FAIL狀態;
Bit7:ECU沒有得到點亮警示燈請求
1.5凍結幀與擴展數據
從上文可知,DTC中8bit位可以描述DTC狀態,但8個bit位能夠承載的信息是有限的,僅能說明故障是當前故障還是歷史故障。故障發生時的車速,溫度,油量,電量等關鍵信息怎么記錄呢?
UDS中規定了凍結幀可以用來記錄故障發生時的詳細情況,擴展數據可以提供故障碼相關的擴展信息,包括老化計數器。
| 類型 | 組成 | 內容 |
| 凍結幀 | 由一系列DID組成,用戶可以自定義DID內容 | 描述車速,溫度,油量,等信息 |
| 擴展信息 | 由一系列DID組成,DID內容由BSW規定 | 描述故障碼的額外信息,比如老化周期數量。 |
2.DEM詳解
2.1 DEM主要功能
Dem全稱Diagnostic Event Manager,負責診斷故障事件的處理,存儲診斷故障事件以及故障事件相關聯的數據(故障發生時溫度,車速等)。簡而言之,Dem發揮了AUTOSAR架構中故障”中央處理器作用”,用戶軟件模塊只需要將故障上報給DEM,所有故障信息的處理都由DEM執行:
1.故障確認前:用戶模塊上報故障的Debounce防抖處理,確保對應故障不為誤報故障。
2. 故障確認時:故障事件確認時的故障數據存儲至NVM,保證故障能長期保存。
3. 故障確認后:故障的老化,替代,實現故障修復后,故障能被清除的功能。例如,儀表上的發動機故障燈,在發動機修好后一段時間后就會熄滅。
2.2 DEM與其他模塊關系
1)DEM在AUTOSAR架構位置
Dem位于AUTOSAR架構系統服務層,系統服務層提供了以下服務:
1.操作系統調度與監控服務、
3.存儲服務
4.診斷服務(UDS通信服務以及故障服務)
5.ECU狀態管理服務
從下面架構圖可以看出,Dcm與Dem作為“診斷雙雄”,完整提供了所有的診斷服務。區別在于,Dcm主修“UDS診斷通信服務”,對下與通信協議棧聯系,與外部診斷儀交互提供診斷通信服務(10,22等服務);Dem主修故障診斷服務,與上層SWC,BSW模塊交互,接收故障上報,與NVM交互使用存儲功能。
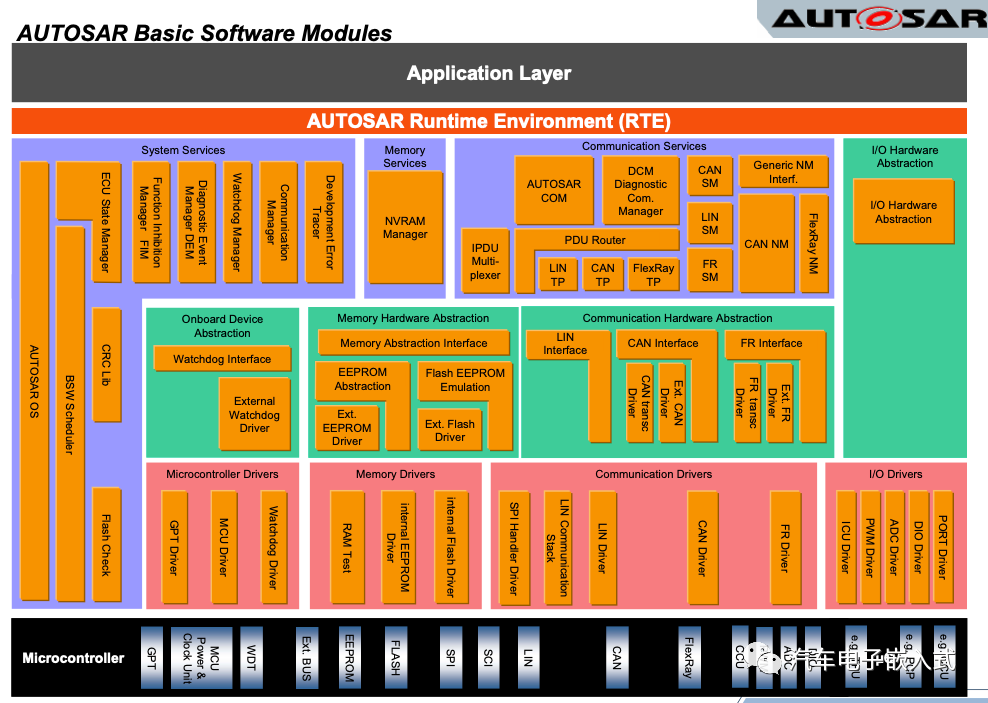
AUTOSAR架構圖
2)Dem與其他模塊依賴關系
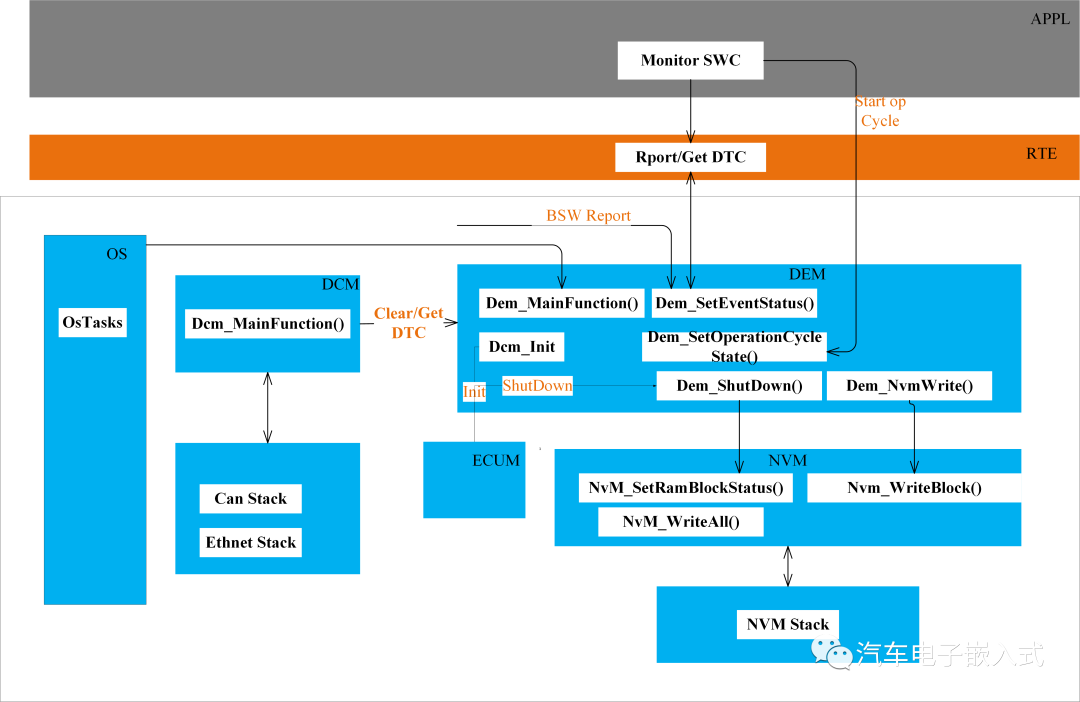
Dem與其他模塊關系鏈路圖
NVM: Nvm能夠提供存儲服務給Dem使用,即提供診斷故障存儲所需的NVM BLOCK。需要注意的是,Nvm給Dem提供了兩類存儲服務接口,Nvm_WriteBlock()供DEM實時存儲診斷故障,NvM_SetRamBlockStatus()供Dem下電存儲診斷故障,上述存儲模式可以在DTC配置屬性中體現。
DCM:從上圖中可以看出,DCM在接收到診斷儀的19服務(get Dtc),14服務(Clear Dtc)時,需要實時通過Dem獲取DTC數據以及對DTC進行清除操作。
ECUM:對Dem模塊執行初始化以及ShutDown操作。
SWC(Monitor):監控診斷故障事件Event,通過使用Dem_SetEventStatus()函數,將Event狀態上報給Dem。使用Dem_SetOperationCycleState()對操作循環狀態進行控制。
2.3 DEM核心Event
在介紹DEM的具體功能前,先引入概念“Diagnosticevent”,“Diagnostic event”也是DEM模塊中最重要的元素。對于AUTOSAR軟件架構,DTC只是展示給診斷儀使用者,而Event才是DTC狀態實際操控者,同時Event也是診斷NVM數據存儲實際控制者。
各位讀者肯定會有如下問題:
為什么要引入 “Diagnostic event”呢?
“Diagnostic event”來源?
“Diagnostic event”有哪些特性呢?
“Diagnostic event”怎么控制DTC?
“Diagnostic event”怎么控制診斷數據存儲?
接下來將會給大家一一解答上述問題。
1)Event與DTC的聯系與區別
區別:
1.描述層級:DTC是系統層面對于故障的描述,而Event是軟件層面對故障監控的最小單元。
例子:某個電機故障會由電壓過高造成,但軟件是無法直接識別該故障,軟件只能監控是否產生了電壓過高的時間Event,從而計算出是否產生DTC.
2.鏈接關系:多個event可以mapping 同一個DTC;而同一個event不能mapping 多個DTC;
3.可見度:DTC可以直接可見,但Event需通過進一步手段才能看到,有時僅對ECU供應商可見;
聯系:
1.DTC代表某類event集中表現,而event則是某個DTC的具體實例;
2.event的優先級決定了DTC的優先級;
3.event之間的依賴關系決定了DTC的依賴關系;
2)“Diagnostic event的上報方式
上文提到了SWC監控故障Event的狀態,并可以通過Dem_SetEventStatus(EventId,EventStatus)向DEM上報Event狀態。那么對于SWC,應該怎樣上報Event狀態呢?周期調用Dem_SetEventStatus上報即為周期循環上報;當Event狀態變化時,調用Dem_SetEventStatus上報為觸發上報。兩種上報方式各有優缺點,如下圖所示,切不可一刀切。
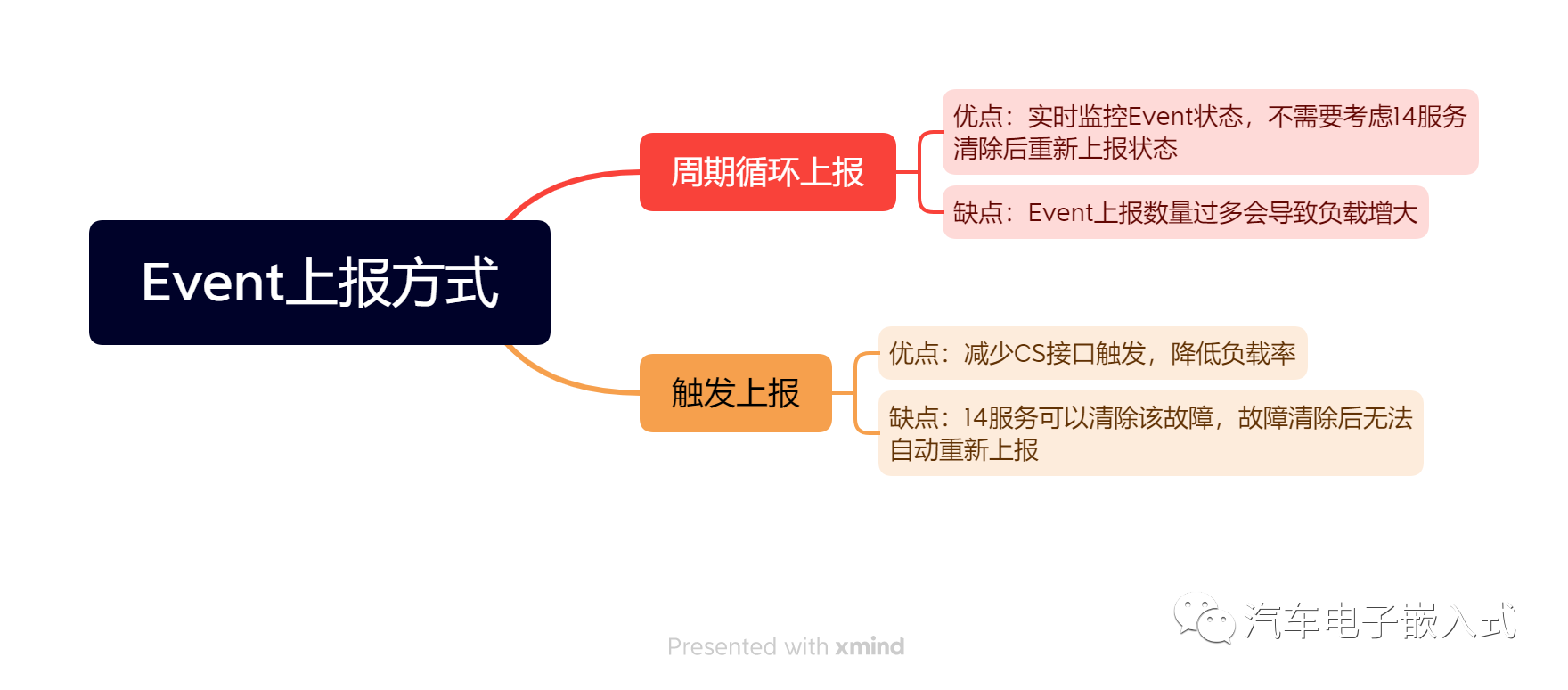
一般來說,對于小型控制器,需要上報Event數量不多,可以選擇周期循環上報。
對于域控制器,需要上報的Event數量龐大,為了保證負載率穩定,應該選擇觸發上報。
3)“Diagnostic event”有哪些特性呢?
1.Event Kind
Event Kind根據故障事件上報方式可分為:BSW Event與SWC Event。
| Event Kind | 來源 | 上報方式 | 函數名 |
| BSW Event | BSW模塊 | 標準C接口 | Dem_ReportErrorStatus |
| SWC Event | SWC模塊 | RTE接口 | SetEventStatus(RTE) |
2.Event priority
對于診斷,能夠存儲的故障事件以及對應凍結幀等相關數據的數量是恒定的,需要軟件開發工程師提前配置。當內部存儲的故障事件已經滿了,Event優先級可以解決新的故障事件如何存儲的問題。
一般來說,診斷優先級的設定由診斷系統工程師從整車功能出發,根據診斷故障的重要性,安全性,嚴重性綜合評估。比如汽車的動力故障遠比空調故障嚴重,所以動力相關故障優先級一般會大于空調相關故障。
診斷事件優先級有下面幾個重要特點:
1)診斷事件優先級數值越小,優先級越高,數值為1優先級最大。
2)Event優先級僅在診斷事件已經存滿情況下發揮作用,其余情況根據FIFO原則存儲。
3.Event occurrence
Event occurrence顧名思義就是故障事件上報計數器,故障上報次數越多,Event occurrence值越大,標志著該故障越“老”。“新”‘老’故障標簽在后續新的故障事件如何存儲的仲裁機制上也會發揮重要作用,這部分內容在后面的內容會詳細說明。
Event occurrence存在以下特點,如下所示:
1.每一個event memory entry都有對應的Event occurrence。
2.Event occurrence最大值為255。
3.Event occurrence的計數方式有如下兩種配置選擇:
| 配置屬性 | 計數方式 |
| DEM_PROCESS_OCCCTR_TF | Bit0(TestFail)由0跳變至1,Event occurrence +1 |
| DEM_PROCESS_OCCCTR_CDTC | Bit0(TestFail)由0跳變至1和Bit3由0跳變至1,Event occurrence +1 |
2.4 EventMemory存儲內容
上文對Event,凍結幀,擴展數據等作了詳細描述,那么,這些數據在DEM中是怎么存儲的呢?DEM提供了Event Memory概念,將Event,凍結幀,擴展數據全部歸納起來做了統一管理。廢話不多說,開始探索Event Memory吧。
EventMemory分類:
| 類型 | 含義 |
| DemPrimaryMemory | 存儲EventId,故障狀態,凍結幀,擴展數據 |
| DemMirrorMemory | |
| Permanent Event Memory | 用于存儲OBD相關的DTC |
Event Memory的組成架構如下圖所示:
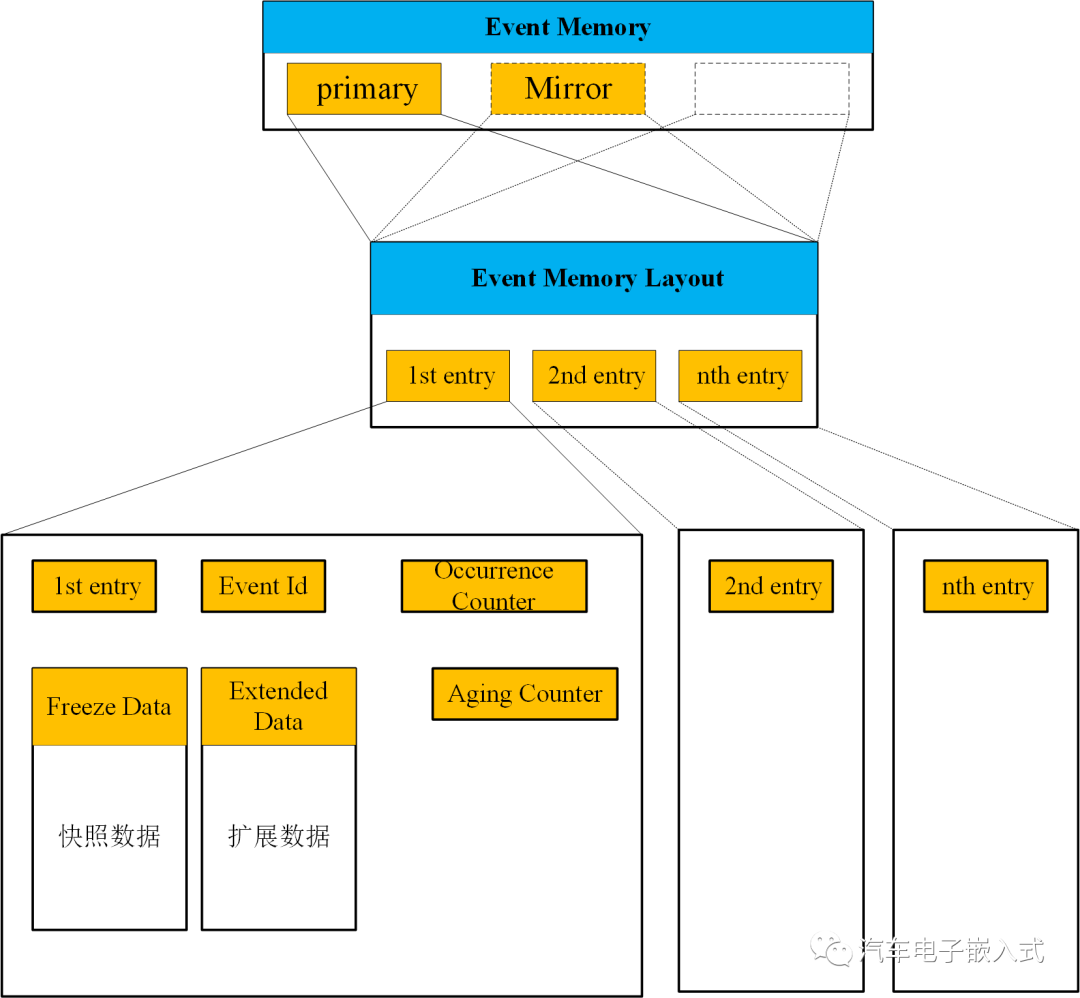
Event Memory組成架構圖
S1:Dem模塊必須支持PrimaryMemory,Mirror和Permanent memory可根據用戶需要具體選擇,一般用不上。
S2: Primary Memory是一個大小為DemMaxNumberEventEntryPrimary用于存儲故障數據的非易失性存儲空間。也就是PrimaryMemory由DemMaxNumberEventEntryPrimary個EventMemory Entry組成。
本質上,DemMaxNumberEventEntryPrimary設置為多少,NVM就會提供多少個NVMBlock用于存儲Primary Memory,就只能存儲多少個Event信息。
S3:每個Event Memory Entry存儲的內容有:EventId,Occurance Counter,凍結幀,擴展數據,老化周期等。
2.5 EventMemory management
當SWC或者BSW上報Event后,會經過哪些處理最終變成Flash中的Event Memory呢?
從下圖中可以看出,Event上報后需要經過下列處理: Event使能條件檢測
Event控制DTC Bit位更新 Event Memory Retention
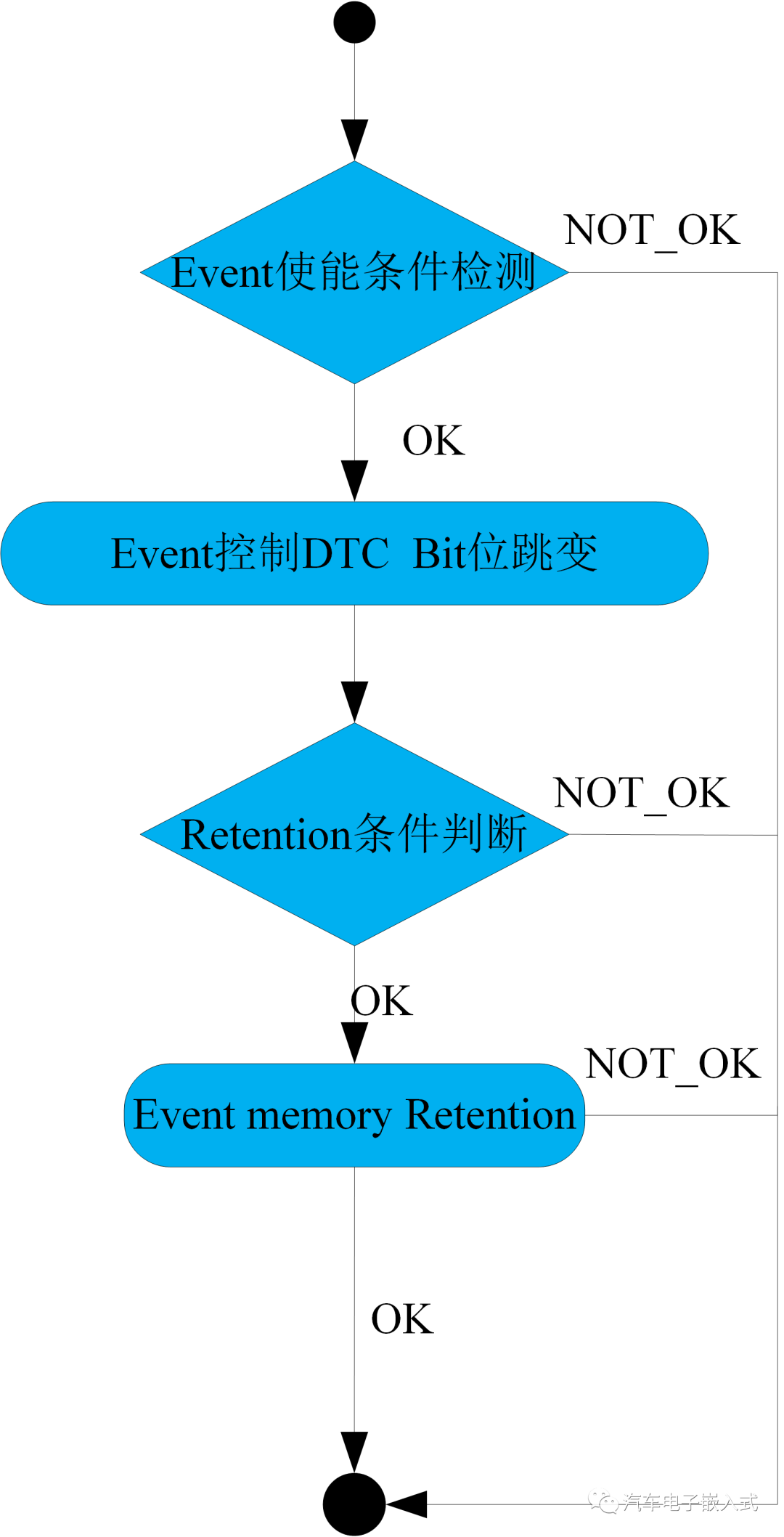
Event Memory management流程圖
1)Event使能條件檢測
Event使能條件就相當于Dem中的一個閘門,只有在條件合適的情況下Event才能真正進入Dem的處理流程中。
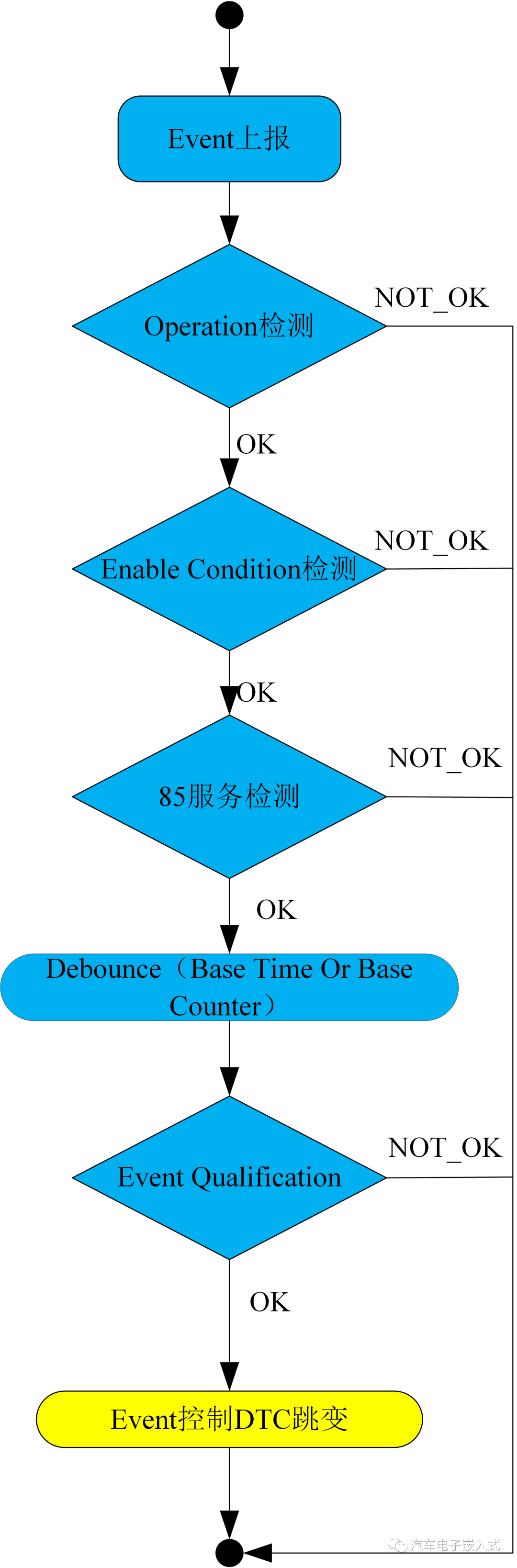
Event使能條件流程圖
從圖中可以看出,Event上報至最終能到第二階段Event控制DTC bit位跳變,需要經歷很多流程,接下來對上述流程進行詳解。
S1:首先,需要判斷當前是否開啟了操作循環,操作循環一般指的是點火循環,一個操作循環可以認為是DTC檢測的一個周期。如果操作循環開啟了,則開始下列的Enable Condition判斷,否則直接退出整個Event Memorymanagement流程。
S2::EnableCondition判斷指的是Event上報增加的一個附加條件判斷,Dem通過對應的接口給SWC使用,SWC實現附件條件處理。一般可以用來處理一些電壓,車輛模式等限制條件。如果Enable Condition條件滿足,則進行85服務判斷;如果Enable Condition條件不滿足,則直接退出Event Memorymanagement流程。
S3: 若現在使用了85服務抑制DTC使能,則直接退出整個Event Memory management流程。若沒有執行85服務,開始Event Debounce流程。
S4:經過Debounce后,如果最終Event結果為Pass或者Fail,則開始下一階段Event控制DTC跳變;否則直接跳出退出整個Event Memory management流程。
Event Debounce “Debounce”顧名思義,指對于Event的防抖處理,防止Event誤報導致DTC誤報。 SWC通過Dem_SetEventStatus(EventId,EventStatus)上報Passed/Failed/PrePassed/Prefailed四種狀態。 1)當SWC上報Passed和Failed狀態時,Dem不需要進行Debounce處理。 2)當SWC上報Prefailed和Prepassed狀態時,Dem需要進行Debounce處理。
本質上,Dem提供的Debounce為通過特定機制,處理PrePassed/Prefailed至Passed/Failed狀態變化。
Dem提供了兩種Debounce機制,即“Base Time”和“Base Counter”。
1.基于計數器的Debounce策略
基于Counter的Debounce策略的幾個重要參數如下表格:
| 參數 | 含義 |
| FDC(Fault Detection Counter) | 錯誤計數器,值范圍為-128-127 |
| DemDebounceCounterFailedThreshold | 使Event診斷事件狀態最終為Failed的Debounce Counter閾值 |
| DemDebounceCounterPassedThreshold | 使Event診斷事件狀態最終為Passed的Debounce Counter閾值 |
| DemDebounceCounterIncrementStepSize | 當SWC上報Prefailed,錯誤計數器增加量 |
| DemDebounceCounterDecrementStepSize | 當SWC上報Prepassed,錯誤計數器增加量 |
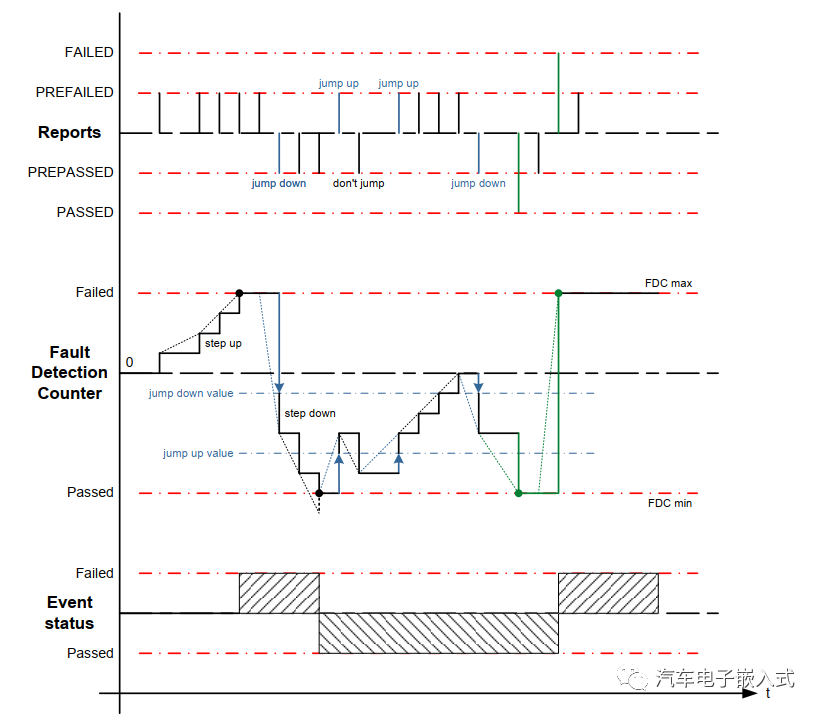
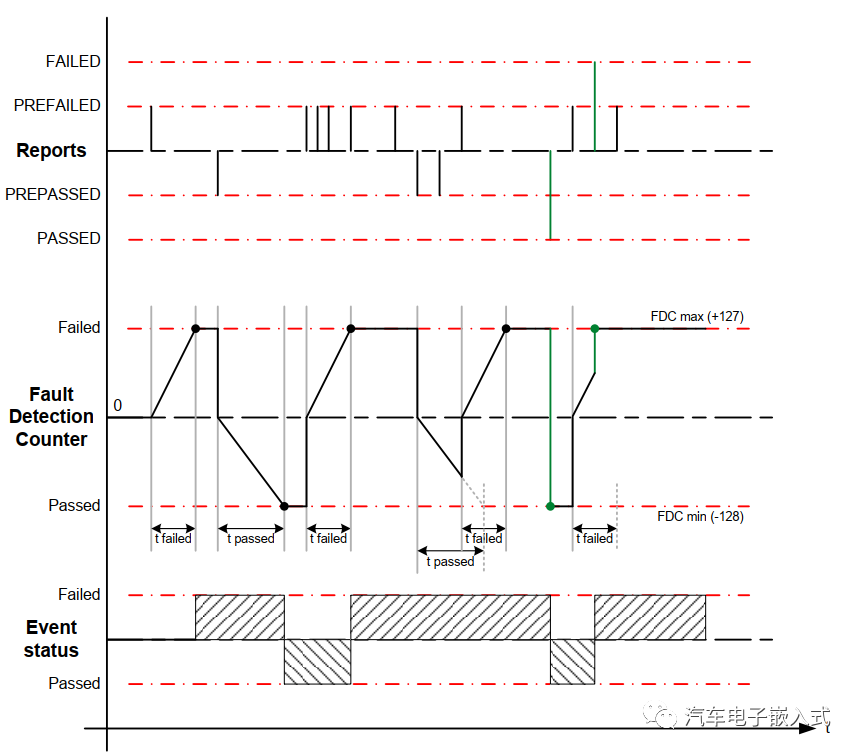
基于Couneter的Debounce機制
如上圖所示,在基于Counter的Deboucne機制中,Dem會提供一個計數器(FDC)用于記錄判斷的結果,當SWC上報給Dem的Event狀態為Prefialed,計數器會按照步長增加,當達到設定的限值時,故障狀態變成Failed。當上報狀態為PrePassed時,計數器按照步長減少,當達到設定的限值時,故障狀態變成Passed。
2.基于時間的Debounce策略
基于時間的Debounce策略的幾個重要參數如下表格:
| 參數 | 含義 |
| DebounceTimeBasedTaskTime | 基本的檢測周期 |
| DemDebounceTimeFailedThreshold | 定義故障狀態從PreFailed跳轉至Failed需要多少個DebounceTimeBasedTaskTime周期 |
| DemDebounceTimePassedThreshold | 定義故障狀態從PrePassed跳轉至Passed需要多少個DebounceTimeBasedTaskTime周期 |
基于時間的Debounce機制
在這種策略下,當SWC開始上報Event狀態后,Dem模塊會提供一個計時器用于記錄判斷的結果,計時器的增長方向由Event狀態決定。當計時器累積到一定閾值后,故障狀態變為Passed或者Failed。
3)Event 控制DTC狀態更新
當Event經過一系列處理,最終能夠對DTC狀態進行更新,DTC 8個bit更新邏輯如下:
DTC Bit0 更新邏輯
| Bit位更新 | 條件 |
| 0 -> 1 | 經Debounce后最終上報狀態為Failed |
| 1 -> 0 |
經Debounce后最終上報狀態為Passed OR 使用14服務清除DTC OR 復位事件狀態 |

DTC Bit0 更新邏輯圖
DTC Bit1更新邏輯
| Bit位更新 | 條件 |
| 0 -> 1 | 經Debounce后最終上報狀態為Failed |
| 1 -> 0 |
操作循環更新 OR 使用14服務清除DTC |

DTC Bit1 更新邏輯圖
DTC Bit2更新邏輯
| Bit位更新 | 條件 |
| 0 -> 1 | 經Debounce后最終上報狀態為Failed |
| 1 -> 0 |
(操作循環更新 AND TestFailedThisOperationCycle == 0) OR 使用14服務清除DTC OR TestNotCompeleteThisOperationCycle == 0 |

DTC Bit2 更新邏輯圖
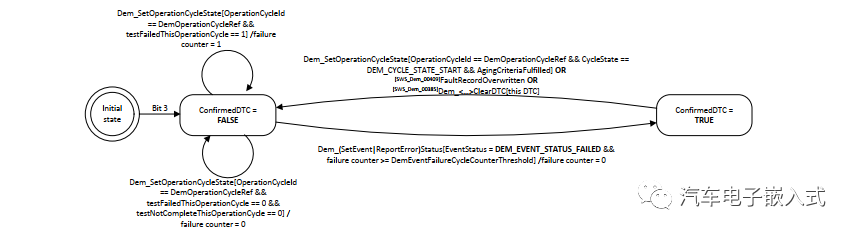
DTC Bit3更新狀態
| Bit位更新 | 條件 |
| 0 -> 1 |
經Debounce后最終上報狀態為Failed AND Fialure Counter > = 故障確認閾值 |
| 1 -> 0 |
達到老化條件 OR 使用14服務清除DTC OR 故障溢出被替換 |
DTC Bit3 更新邏輯圖
DTC Bit4更新邏輯
| Bit位更新 | 條件 |
| 0 -> 1 | 經Debounce后最終上報狀態為Failed |
| 1 -> 0 | 使用14服務清除DTC |

DTC Bit4 更新邏輯圖
DTC Bit5更新邏輯
| Bit位更新 | 條件 |
| 0 -> 1 | 經Debounce后最終上報狀態為Failed |
| 1 -> 0 | 使用14服務清除DTC |

DTCBit5 更新邏輯圖
DTC Bit6更新邏輯
| Bit位更新 | 條件 |
| 0 -> 1 | 經Debounce后最終上報狀態為Failed |
| 1 -> 0 |
使用14服務清除DTC OR 操作循環更新 |

DTCBit6更新邏輯圖
DTC Bit7更新邏輯
| Bit位更新 | 條件 |
| 0 -> 1 |
經Debounce后最終上報狀態為Failed AND 點燈條件滿足 |
| 1 -> 0 |
使用14服務清除DTC OR 點燈條件不滿足 |
DTCBit7更新邏輯
4)Retention條件檢測
當DTC狀態完成更新后,Dem將開始進行Retention條件檢測。Dem給用戶提供多種策略用以判斷是否需要分配Event Memory Entry。分配策略由配置DemEventMemoryEntryStorageTrigger決定,具體如下面表格所示:
| DemEventMemoryEntryStorageTrigger | 分配條件 |
| DEM_TRIGGER_ON_TEST_FAILED | DTC bit0 由0跳變成1 |
| DEM_TRIGGER_ON_CONFIRMED | DTC bit3 由0跳變成1 |
| DEM_TRIGGER_ON_PENDING | DTC bit2 由0跳變成1 |
| DEM_TRIGGER_ON_FDC_THRESHOLD |
DTC bit0 由0跳變成1 OR DTC bit1由0跳變成1 OR DTC bit2由0跳變成1 OR DTC bit3由0跳變成1 |
5)Event Memory Retention處理
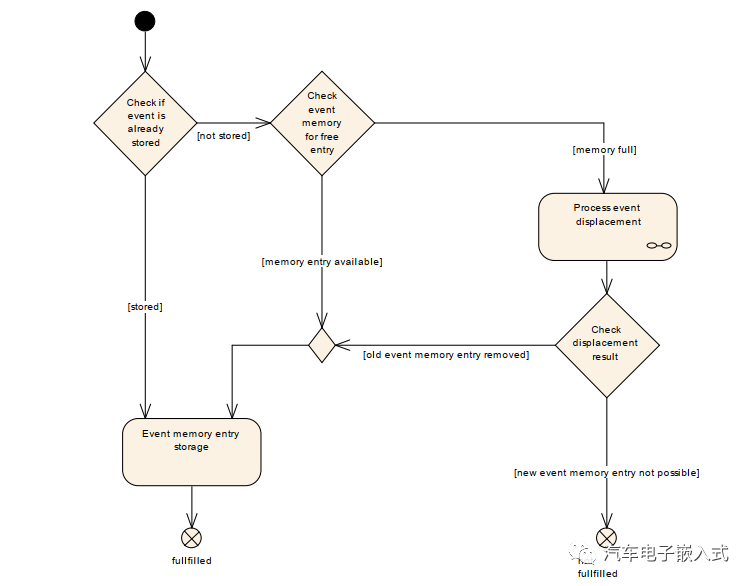
Event上報經過了使能條件檢測,Event控制DTC Bit位狀態更新,Retention條件檢測重重難關,最終被允許進入Event Memory,Dem會怎樣將Event(DTCs),DTC狀態,快照,擴展數據存入Event Memory中呢?
基本思路如下:
Event Memory Retention處理機制
S1:在Event Mmeory所有Event Mmeory Entry中搜索,檢查該Event及相關數據是否已經存入Event Memory中,如果已經存在,則進入Event MemoryEntry Storage。如果不存在,則在Event Memory中尋找空間用于存儲Event內容,如果Event Memory中空間已滿,則需要使用Replacement機制。
S2:當進入Event memory Storage,Occurance Counter需要加1,判斷是否需要更新凍結幀,擴展數據。 EventDisplacement處理 Event Memory存儲了數量為DemMaxNumberEventEntryPrimary的Event MemoryEntry,當Event Memory Entry已滿,需要進行Replacement,即根據一定的策略決定新增的Event如何存儲。Dem模塊提供了一套完善的機制用于Replacement,該機制有三個核心原則:
1.Event Priority(數字越小存儲優先級越高)
2.Event Active或者Event Passive狀態(Active優先級高于Passive優先級)
3.Event Occurance Counter(最近發生的存儲優先級高于之前發生的)
被替換的Event對應DTC中Bit2,Bit3 ,Bit5會被設置為0.
下圖展示了整套Event Displacement機制,體現了三個核心原則在替換機制中的作用。
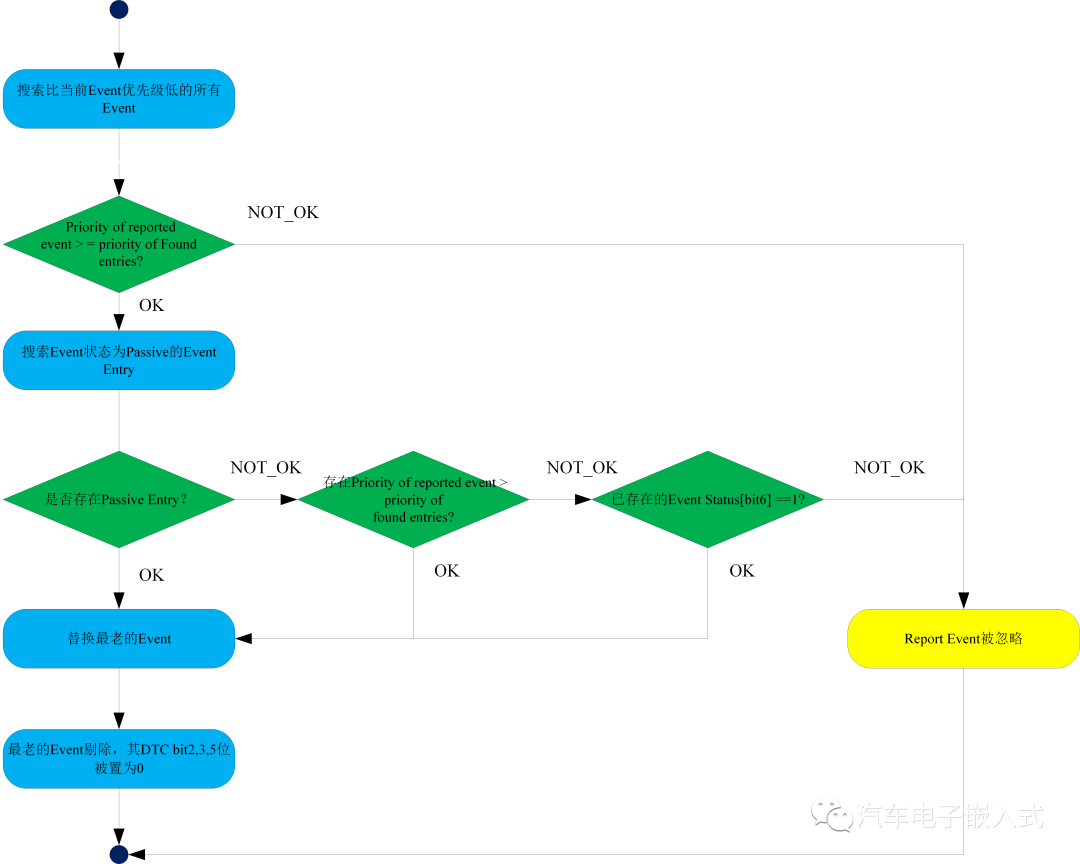
Event Displacement機制
總結
DEM是以DTC為核心的AUTOSAR基礎軟件模塊,實現了對DTC的監控上報,存儲等功能,如果需要對AUTOSAR診斷進行進一步學習,還需要對DCM,Doip,Cantp等模塊進行系統性學習。
審核編輯:劉清
-
FlaSh
+關注
關注
10文章
1634瀏覽量
147967 -
RAM
+關注
關注
8文章
1368瀏覽量
114658 -
MUDS
+關注
關注
0文章
2瀏覽量
5589 -
DTC控制
+關注
關注
0文章
18瀏覽量
1173
原文標題:全面講解系統診斷管理模塊設計
文章出處:【微信號:eng2mot,微信公眾號:汽車ECU開發】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
RFID應急物資管理系統該怎么來規劃?


?MES系統如何精準采集與對接設備數據,全面優化設備管理
光伏電站故障預警與在線監測智能診斷系統 一鍵運檢 多維度故障對比
TSMaster 的 CAN UDS 診斷操作指南(下)

全面介紹智慧樓宇IBMS管理系統

AC/DC電源模塊的故障診斷與維修技巧

如何從0到1設計診斷系統
智慧園區管理系統的全面介紹與優勢
PLC自診斷的方式
智慧園區綜合管理系統:定制化解決方案助力工廠園區高效運轉

汽車故障診斷UDS網絡層原理講解






 工商網監
工商網監
評論