 怎么設計一個32bit浮點的加法器呢?
怎么設計一個32bit浮點的加法器呢?
設計需求
設計一個32bit浮點的加法器,out = A + B,假設AB均為無符號位,或者換個說法都為正數。
clk為系統時鐘;rst_n為系統復位,低有效;en信號控制數據輸入;busy指示模塊工作狀態,busy拉高時,輸入無效;aIn和bIn是數據輸入,out_vld,指示輸出數據有效。
設計的信號列表如下:
module float_adder(
input clk,
input rst_n,
input en,
input [31:0] aIn,
input [31:0] bIn,
output reg busy,
output reg out_vld,
output reg [31:0] out
);
32bit的浮點格式
EE標準754規定了三種浮點數格式:單精度、雙精度、擴展精度。前兩者正好對應C語言里頭的float、double或者FORTRAN里頭的real、double精度類型。本文設計實現的為單精度。
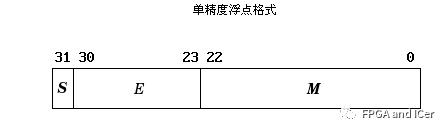
單精度格式
單精度:N共32位,其中S占1位,E占8位,M占23位。
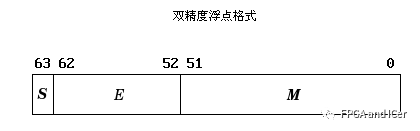
雙精度格式
雙精度:N共64位,其中S占1位,E占11位,M占52位。
浮點數的加法過程
運算過程:對階、尾數求和、規格化、舍入、溢出判斷
對階:
和定點數不相同的是,浮點數的指數量級不一定是一樣的,所以這也就意味著,尾數直接進行加法運算時會存在問題,也就需要首先對階數進行處理。該過程有點像科學計數法的加法處理,把科學計數法的指數化為一致,求出來指數相差多少,然后移位處理后再進行加法減法。所以這里處理也要先求階差。
如果把階碼大的向階碼小的看齊,就要把階碼大的數的尾數部分左移,階碼減小。這個操作有可能在移位過程中把尾數的高位部分移掉,這樣就引發了數據的錯誤,所以,尾數左移在計算機運算中不可取。
如果把階碼小的向階碼大的看齊,在移位過程中如果發生數據丟失,也是最右邊的數據位發生丟失,最右邊的數據位丟失,只會影響數據的精度,不會影響數據的大小。
尾數求和 :
這里就是常規的補碼加法。
規格化:
右規(尾數的絕對值太大時,右規) 尾數右移一位,階碼加1。 當尾數溢出( >1 )時,需要右規 。是否溢出,可以通過兩位的符號位得出:即尾數出現01.xx…xx或10.xx…xx(兩位符號位不同)
提高浮點數的表示精度,這里設計考慮比較簡單,我只考慮了同號數據相加的情況,所以這里只設計了右規的情況,不考慮符號位。
舍入判斷:
這里直接用截斷處理的方式,針對數據相加上溢的情況,規定了運算后上溢后將數據規定為最大值。
實現代碼
module float_adder(
input clk,
input rst_n,
input en,
input [31:0] aIn,
input [31:0] bIn,
output reg busy,
output reg out_vld,
output reg [31:0] out
);
//運算過程:對階、尾數求和、規格化、舍入、溢出判斷
//分離階數、尾數
wire signal_bit = aIn[31];
wire [7:0] pow_a = aIn[30:23];
wire [7:0] pow_b = bIn[30:23];
wire [22:0] val_a = aIn[22:0];
wire [22:0] val_b = bIn[22:0];
//找到輸入指數階數較大,和階數差
//對階:在計算機中,采用小階向大階看齊的方法,實現對階。即右移
reg [22:0] pow_max ;
reg [23:0] pow_dif ;
reg [22:0] val_max ;
reg [22:0] val_min ;
reg en_dly0;
always @(posedge clk or negedge rst_n) begin
if(rst_n==0)begin
pow_max <= 'd0;
val_max <= 'd0;
val_min <= 'd0;
pow_dif <= 'd0;
en_dly0 <= 'd0;
end
else if( en == 1 && busy == 0)begin
if(pow_a >= pow_b)begin
pow_max <= pow_a;
val_max <= val_a;
val_min <= val_b;
en_dly0 <= 'd1;
if ( pow_a - pow_b > 'd23) begin
pow_dif <= 'd23;
end
else begin
pow_dif <= pow_a - pow_b;
end
end
else begin
pow_max <= pow_b;
val_max <= val_b;
val_min <= val_a;
en_dly0 <= 'd1;
if ( pow_b - pow_a > 'd23) begin
pow_dif <= 'd23;
end
else begin
pow_dif <= pow_b - pow_a;
end
end
end
else begin
pow_max <= pow_max;
val_max <= val_max;
val_min <= val_min;
pow_dif <= pow_dif;
en_dly0 <= 'd0;
end
end
//移位忙指示信號
reg shift_busy;
reg [4:0] shift_cnt;
always @(posedge clk or negedge rst_n) begin
if (rst_n==0) begin
shift_busy<='d0;
end
else if(en_dly0 == 1 )begin
shift_busy <='d1;
end
else if(shift_cnt == pow_dif)begin
shift_busy <= 0;
end
end
//移位計數
always @(posedge clk or negedge rst_n) begin
if(rst_n == 0)begin
shift_cnt <= 'd0;
end
else if (shift_busy ==1) begin
if (shift_cnt == pow_dif) begin
shift_cnt <= shift_cnt;
end
else begin
shift_cnt <= shift_cnt + 1'b1;
end
end
else begin
shift_cnt <= 'd0;
end