 三菱定位模塊FX3U-1PG案例分享
三菱定位模塊FX3U-1PG案例分享
1功能應用場合
控制要求:在FX3U本體的3個脈沖軸用完了,還需要在加一個軸的情況,要求這個軸既能手動控制也能自動控制伺服軸,自動控制,伺服目標點位可以更改。
2硬件設備
1、三菱PLC
2、FX3U-1PG模塊
3、伺服驅動器
3軟件
1、GX Work2
2、MR - Configurator2
4三菱PLC控制要求分析和選型
控制要求分析和選型:分析需要添加一個軸的定位,避免浪費,且后期不需要做添加軸的情況下,我們這里添加FX3U-1PG這個模塊,這個模塊控制一個軸,控制采用FX3U-1PG模塊。
5三菱PLC模塊IO口分配
PLC的IO口分配
| IO點 | IO注釋 |
| X0 | 復位信號 |
| X1 | 電機停止信號 |
| X2 | 電機正轉極限 |
| X3 | 電機反轉極限 |
| X4 | 正方向點動 |
| X5 | 反方向點動 |
| X6 | 電機回原點 |
| X7 | 定位啟動 |
FX3U-1PG脈沖模塊指示燈含義
| 字符 | 名稱 | 顏色 | 狀態 | 含義 |
| POWER | 電源指示燈 | 綠燈 | 滅燈 | 可編程控制器沒有供應DC5V |
| 亮燈 | 可編程控制器正在供應DC5V | |||
| STOP | 停止 | 紅燈 | 滅燈 | STOP輸入OFF |
| 亮燈 | STOP輸入ON | |||
| DOG | 原點信號 | 紅燈 | 滅燈 | DOG輸入OFF |
| 亮燈 | DOG輸入ON | |||
| PG0 | 零點信號 | 紅燈 | 滅燈 | 零點信號OFF |
| 亮燈 | 零點信號ON | |||
| FP | 正脈沖指示 | 紅燈 | 滅燈 | 正轉脈沖或脈沖串停止中 |
| 閃爍 | 正轉脈沖或脈沖串輸出中 | |||
| 亮燈 | 旋轉方向輸出中 | |||
| RP | 反轉脈沖指示 | 紅燈 | 滅燈 | 反轉脈沖或脈沖串停止中 |
| 閃爍 | 反轉脈沖或脈沖串輸出中 | |||
| 亮燈 | 旋轉方向輸出中 | |||
| CLR | CLR信號 | 紅燈 | 滅燈 | CLR信號輸出停止中 |
| 亮燈 | CLR信號輸出中 | |||
| ERR | 錯誤指示燈 | 紅燈 | 滅燈 | 正常動作中 |
| 閃爍 | 錯誤發生中 | |||
| 亮燈 | CPU錯誤發生中 |
FX3U-1PG 端子含義
| 名稱 | 含義 | 名稱 | 含義 |
| VIN | 脈沖輸出用電源端子 | PG0+ | 零點信號用電源端子 |
| COM0 | 脈沖輸出用公共端子 | COM1 | CLR信號輸出用公共端子 |
| FP | 正轉脈沖或脈沖串輸出端子 | CLR | CLR信號輸出用端子 |
| RP | 反轉脈沖或旋轉方向輸出端子 | STOP | STOP或中斷輸入1用端子 |
| PG0- | 零點信號用輸入端子 | DOG | DOG或中斷輸入0用端子 |
重要緩沖存儲器
| BFM編號 | 位編號 | 項目 | 內容 |
| #25 | b0 | 錯誤復位 |
發生錯誤時置為 ON后,將錯誤標志位、錯誤代碼 和定位結束標志位復位。(僅發生錯誤時有效) |
| b1 | STOP |
定位運行時(包括 JOG運行、機械原點回歸運行) 置為ON后停止。 |
|
| b2 | 正轉限位 | 正轉脈沖輸出中置為ON后停止。 用于在正轉限位位置停止。 | |
| b3 | 反轉限位 | 反轉脈沖輸出中置為ON后停止。 用于在反轉限位位置停止。 | |
| b4 | 正轉JOG運行 | 置為ON后向當前地址增加方向輸出脈沖。置為OFF后停止脈沖。 | |
| b5 | 反轉JOG運行 | 置為ON后向當前地址減少方向輸出脈沖。置為OFF后停止脈沖。 | |
| b6 | DOG式機械原點 | 回歸運行開始 置為ON后開始DOG式機械原點回歸運行。 | |
| b7 | 相對/絕對地址 |
選擇指定絕對地址或指定相對地址。 OFF:通過指定絕對地址運行。 ON:通過指定相對地址運行。 |
|
| b8 | 1速定位運行開始 | 置為ON后開始1速定位運行。 | |
| b9 | 中斷1 速定位運行 | 開始 置為ON后開始中斷1速定位運行。 | |
| b10 | 2速定位運行開始 | 置為ON后開始2速定位運行。 | |
| b11 | 外部指令定位運行 | 開始 置為ON后開始外部指令定位運行。 | |
| b12 | 可變速運行 | ON:開始可變速運行。 OFF:停止可變速運行。 | |
| b13 | 中斷停止運行開始 | 置為ON后開始中斷停止運行。 | |
| b14 | 中斷2 速定位運行 | 開始 置為ON后開始中斷2速定位運行。 | |
| b15 | 數據集式 | 機械原點回歸運行 開始 置為ON后開始數據集式機械原點回歸運行。 | |
| #28 | b0 | READY |
可進行定位運行時,置為ON。 ? 置為ON的條件 - 電源啟動時 - 定位結束時 - 定位運行中因STOP指令停止中 - 錯誤復位時 置為OFF的條件 - 定位運行中 - 發生錯誤時 |
| b1 | 正轉/反轉 |
ON:正轉脈沖輸出中ON 正轉脈沖停止后仍然保持ON狀態。 OFF:反轉脈沖輸出中OFF 反轉脈沖停止后仍然保持OFF狀態。 |
|
| b2 | 原點回歸 |
已執行 原點回歸結束時,置為ON。 置為ON的條件 - DOG式機械原點回歸結束時 - 數據集式機械原點回歸結束時 置為OFF的條件 - 電源OFF - 在狀態信息中寫入K0時 |
|
| b3 | STOP |
ON:STOP輸入ON OFF:STOP輸入OFF 與1PG的STOP端子ON/OFF狀態相同。 |
|
| b4 | DOG輸入ON | ON:DOG輸入ON OFF:DOG輸入OFF與1PG的DOG端子ON/OFF狀態相同。 | |
| b5 | PG0輸入ON | ON:PG0輸入ON OFF:PG0輸入OFF 與1PG的PG0端子ON/OFF狀態相同。 | |
| b6 | 當前值溢出 | 當前地址(BFM#27、#26或 BFM#59、#58)的值超出±32 位數據的范圍時,置為ON。 | |
| b7 | 錯誤標志位 | 發生錯誤時置為 ON,在錯誤代碼(BFM#29)中儲存錯誤 代碼編號。執行電源OFF或錯誤復位(BFM25 b0)后置為OFF。 | |
| b8 | 定位結束 標志位 |
定位運行正常結束時,置為ON。 機械原點回歸運行開始、定位運行開始(可變速運行除 外)或錯誤復位(僅發生錯誤時)置為OFF。 |
|
| b9 | 第1速結束 標志位 |
2速定位、外部指令定位或中斷2速定位運行的第1速運 行結束時,置為ON。置為ON的條件 - 2速定位、外部指令定位或中斷2速定位運行的第 1速結束時 ? 置為OFF的條件 - 定位結束時 - 發生錯誤時 - 取消剩余距離運行時 - 不進行剩余距離運行時(BFM#3 b15或#37 b15為 ON),以STOP指令減速停止時 |
|
| b10 | 中斷輸入0 |
ON:在中斷輸入0有效的運行模式中,檢測到中斷輸入0 時置為ON。OFF:下次運行開始時置為OFF。 |
|
| b11 | 中斷輸入1 |
ON:在中斷輸入1有效的運行模式中,檢測到中斷輸入1 時置為ON。 OFF:下次運行開始時置為OFF。 |
|
| b12 | 剩余距離運行 | 待機中 定位運行(1 速定位運行、2 速定位運行、中斷停止運 行)中的STOP輸入后減速停止,在剩余距離待機中置為 ON。執行重新開始指令或者向BFM#25以外的BFM寫入后置位OFF。 | |
| b13 ~b15 | 不可使用 |
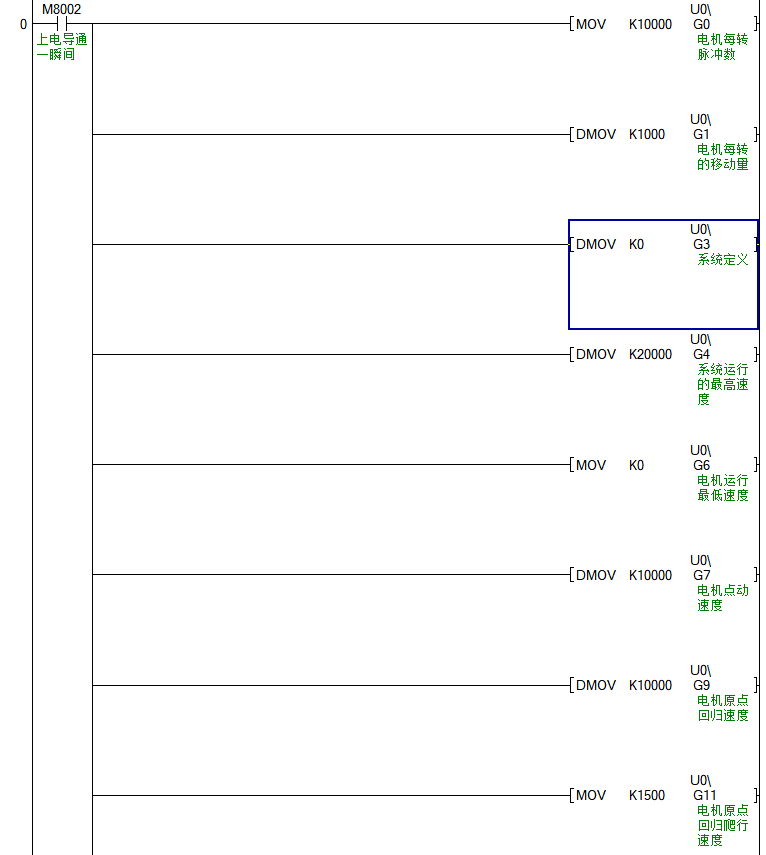
6三菱PLC配方編程實例
程序分析:在上電就設置電機每轉需要的脈沖數,電機每轉移動量,外部電機控制類型,伺服電機的運行最高速度,電機運行的最低速度,電機點動運行速度,電機回原點的一個速度和爬行速度。
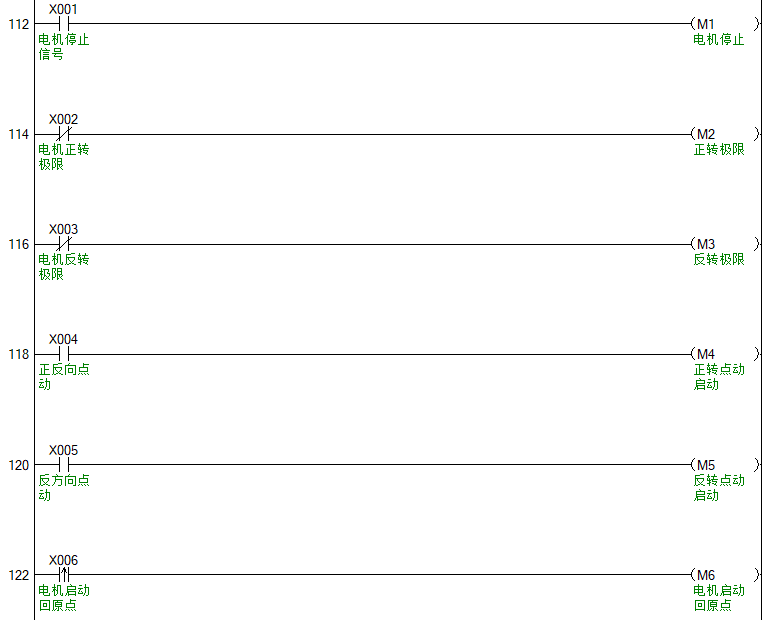
外部輸入信號傳送到M輔助繼電器,一方面是修改外部輸入點的時候更容易,另一方面,是后面的輔助繼電器,更好的使用位組合元件。
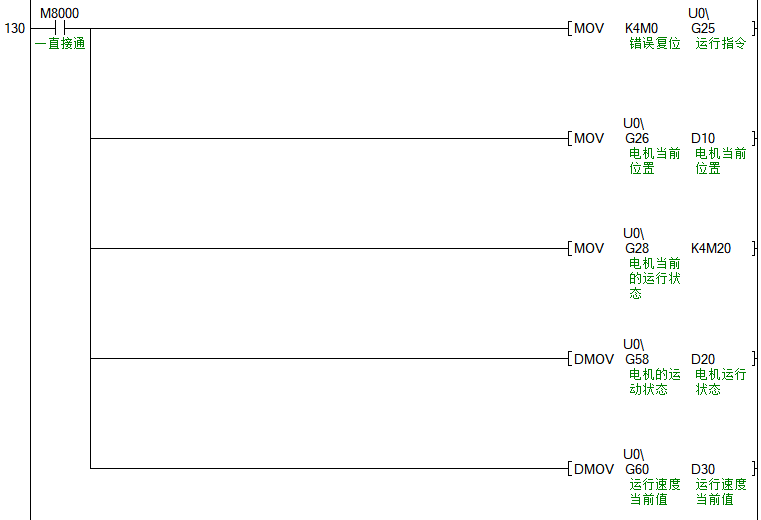
將輸入的信號,進行位組合后傳到運行狀態的特殊寄存器中,用于控制電機的各種運動,詳細參考上面U0G25的每個位的含義。
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
plc
+關注
關注
5010文章
13271瀏覽量
463057 -
三菱
+關注
關注
32文章
802瀏覽量
42798 -
IO口
+關注
關注
3文章
170瀏覽量
24023 -
伺服驅動器
+關注
關注
22文章
481瀏覽量
31543 -
定位模塊
+關注
關注
0文章
104瀏覽量
16362
原文標題:【案例分享】三菱定位模塊FX3U-1PG
文章出處:【微信號:跟我學PLC,微信公眾號:跟我學PLC吧】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
浙江回收三菱PLC 擴展模塊FX2N-16EX 三菱可編程控制器
AJ65SBTB1-16DT,回收三菱plc定位模塊 FX3U-1PG ,回收OMRON歐姆龍PLC模塊
發表于 07-21 13:00
專業回收三菱FX3u可編程控制器,求購三菱Q系列CPU模塊
,高價回收三菱伺服驅動器,J2S系列,J3系列,JE系列,J4系列。回收三菱MITSUBISHI PLC 模塊AJ65SBTB1-16DT,
發表于 08-04 13:54
基于FX3U-1PG構成及接線
FX3U-1PG型脈沖輸出模塊(以下簡稱1PG)是一種特殊功能模塊,最大輸出200kHz的脈沖串,通過單軸伺服放大器或步進電機驅動器,驅動伺服電機或步進電機。特點:
發表于 09-29 18:38
?65次下載
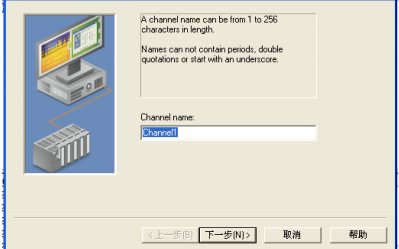
Labview如何通過NI OPC與三菱FX3U PLC進行通訊
本文檔的詳細介紹的是Labview如何通過NI OPC與三菱FX3U PLC進行通訊。
軟件環境:LabVIEW 2014,OPC Servers 2013
硬件條件:三菱 FX3U
發表于 01-09 08:00
?163次下載
FX3U 1PG用戶手冊
。本手冊針對FX3U-1PG型脈沖輸出模塊的使用進行介紹。在使
用之前,請閱讀本書以及相關產品的手冊,希望在充分理解其規格的前提下正確使用產品。
發表于 08-24 15:37
?7次下載

通過PLC網關如何實現三菱FX3U的遠程上下載程序?
FX3U是三菱推出的高性能PLC品牌。基本性能大幅提升,晶體管輸出型的基本單元內置了3軸獨立最高100kHz的定位功能,并且增加了新的定位指
FX3U系列三菱PLC的應用實例
在工業自動化領域中,三菱電機株式會社生產的FX3U系列PLC因其高性能、高可靠性和易用性而備受青睞。FX3U系列PLC擁有強大的處理能力和豐富的功能,廣泛應用于各種工業自動化控制系統中。本文將結合





 工商網監
工商網監
評論