") 優(yōu)秀的IC/FPGA開(kāi)源項(xiàng)目:偽紅外圖像處理
優(yōu)秀的IC/FPGA開(kāi)源項(xiàng)目:偽紅外圖像處理
偽紅外圖像處理
副標(biāo)題:優(yōu)秀的IC/FPGA開(kāi)源項(xiàng)目(七)-偽紅外圖像處理
《優(yōu)秀的IC/FPGA開(kāi)源項(xiàng)目》是新開(kāi)的系列,旨在介紹單一項(xiàng)目,會(huì)比《優(yōu)秀的 Verilog/FPGA開(kāi)源項(xiàng)目》內(nèi)容介紹更加詳細(xì),包括但不限于綜合、上板測(cè)試等。兩者相輔相成,互補(bǔ)互充~
演示偽紅外圖像處理。
介紹
紅外攝像機(jī)因?yàn)閷?duì)可見(jiàn)光不敏感,所以在一些特殊行業(yè)應(yīng)用越來(lái)越廣泛。
紅外攝像機(jī)甚至可以透過(guò)太陽(yáng)鏡看到人眼,并且攝像機(jī)圖像不受白天或夜晚的影響,并且?guī)缀鯖](méi)有環(huán)境光。
因?yàn)檎嬲募t外sensor價(jià)格比較昂貴,所以這次選用一種偽紅外sensor,即利用相機(jī)自己的光源,即安裝在鏡頭旁邊的 LED,反射紅外光后進(jìn)項(xiàng)圖像采集,這是一種利用近紅外成像,和我們熟知的紅外攝像頭還是有區(qū)別的。
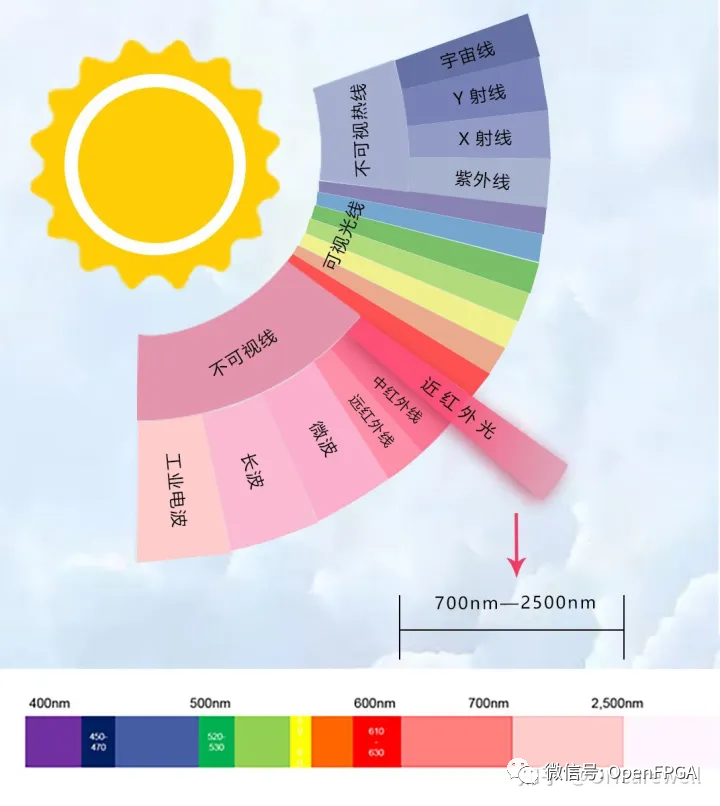
該項(xiàng)目展示了一些紅外圖像處理算法,這些算法可以提高圖像質(zhì)量。
所選FPGA是 ZYNQ-020 SoC,攝像頭是便宜的 Raspberry PI 攝像頭,帶有兩個(gè)紅外 LED,最大分辨率為 1080p@60Hz。
該項(xiàng)目中呈現(xiàn)的體系結(jié)構(gòu)是可擴(kuò)展的,可以輕松添加更多算法。
理論
我選擇了五種基于 3x3 內(nèi)核的圖像處理算法:
壞點(diǎn)校正
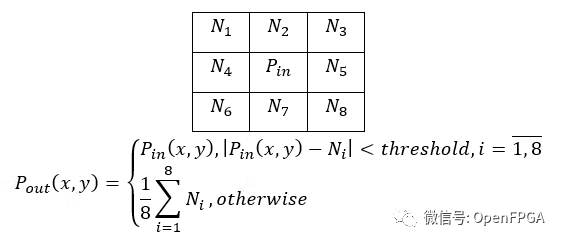
這是所有這類(lèi)傳感器的普遍問(wèn)題,是一種常見(jiàn)的預(yù)處理算法。
中值濾波器
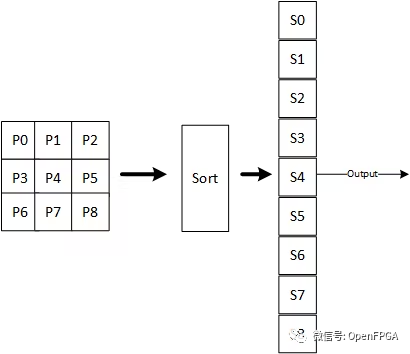
常見(jiàn)的噪聲平滑預(yù)處理算法。
低通濾波器(平滑濾波器)
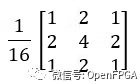
噪聲平滑,這個(gè)算法使圖像平滑,不會(huì)像中值濾波器那樣使圖像模糊。
圖像銳化
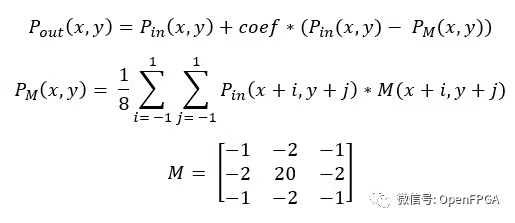
通過(guò)“邊緣銳化”提高圖像質(zhì)量,即強(qiáng)調(diào)邊緣。
邊緣檢測(cè)
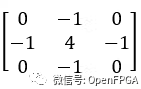
應(yīng)用其中一種算法后,對(duì)圖像邊緣處理后,圖像尺寸會(huì)減小(可選)。
架構(gòu)
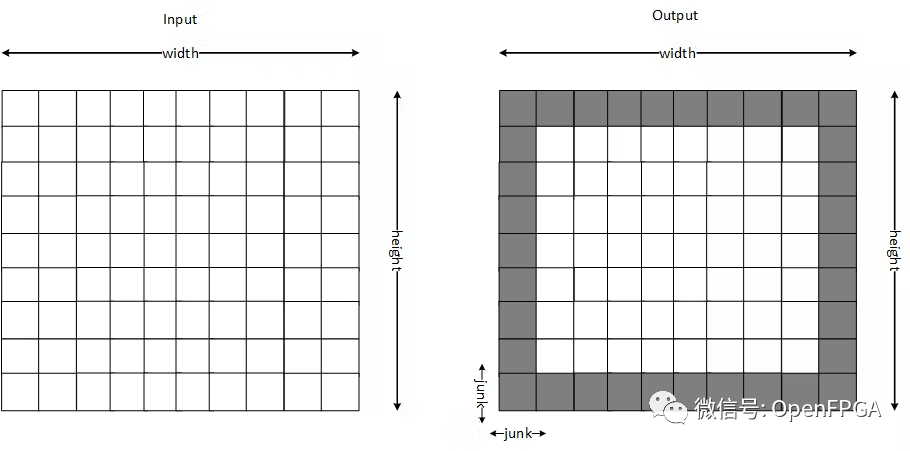
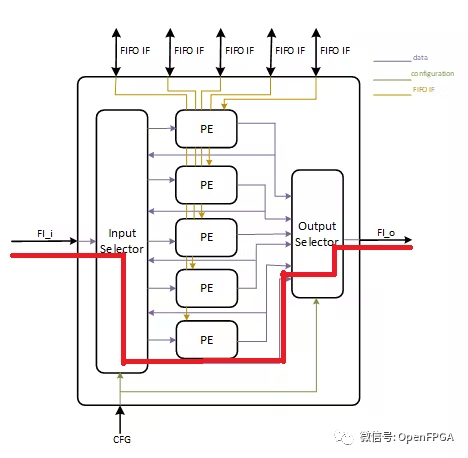
所有算法都基于 3x3 內(nèi)核,這就是為什么所有算法內(nèi)核 (PE) 都必須與 FIFO 通信,每個(gè) PE 都有一行的延遲。只有當(dāng)?shù)诙袛?shù)據(jù)到達(dá)時(shí)才開(kāi)始應(yīng)用算法內(nèi)核,考慮到圖像處理時(shí)候會(huì)對(duì)邊界有影響,但是我們需要輸出端輸出相同的圖像大小。
 架構(gòu)
架構(gòu) 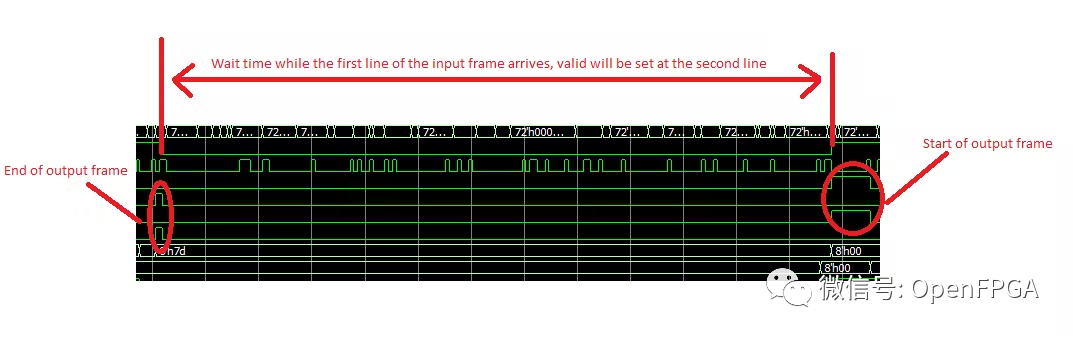
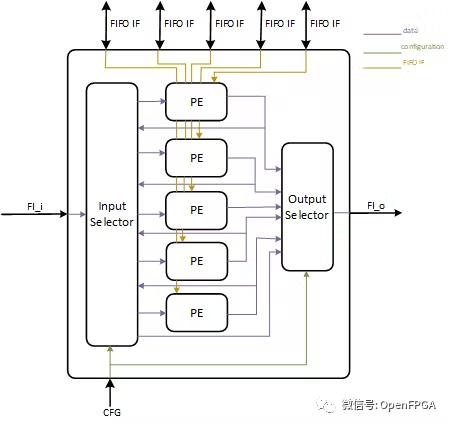
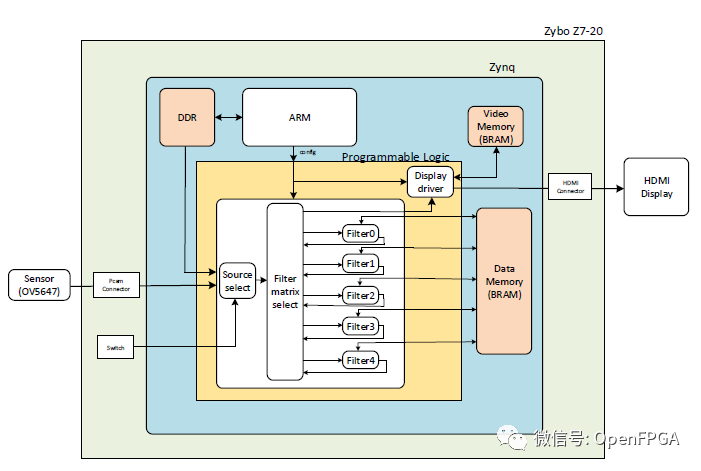
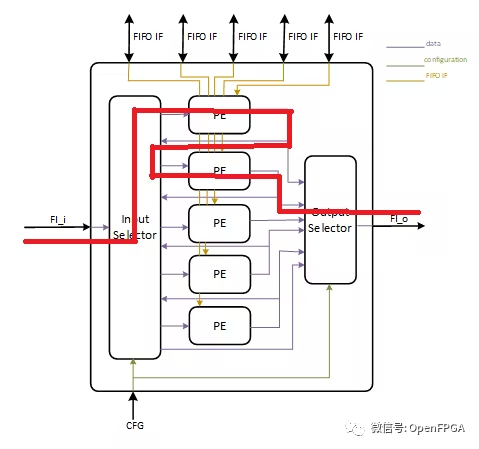
選擇模塊是一個(gè)可擴(kuò)展的 MUX 網(wǎng)絡(luò),在上圖情況下,具有五個(gè)圖像處理算法,由六個(gè)級(jí)聯(lián)的 MUX-es 組成,一個(gè)用于濾波器輸出,一個(gè)用于輸入信號(hào)。數(shù)據(jù)流可以配置,在這種情況下,視頻流從輸入到輸出,它通過(guò)的圖像處理元素的順序和數(shù)量是可配置的。
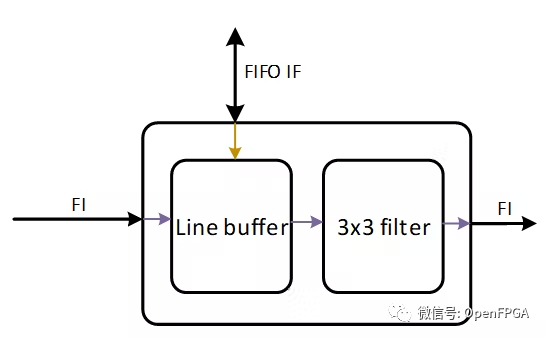
算法內(nèi)核的結(jié)構(gòu)如下所示,基本上在這種情況下是一個(gè)延遲線,它以視頻流作為輸入并輸出一個(gè) 3x3 矩陣,輸出是處理后的幀。
設(shè)計(jì)
在該架構(gòu)中,我在 VDMA 和 Gamma Correction 模塊之間插入了我的模塊。
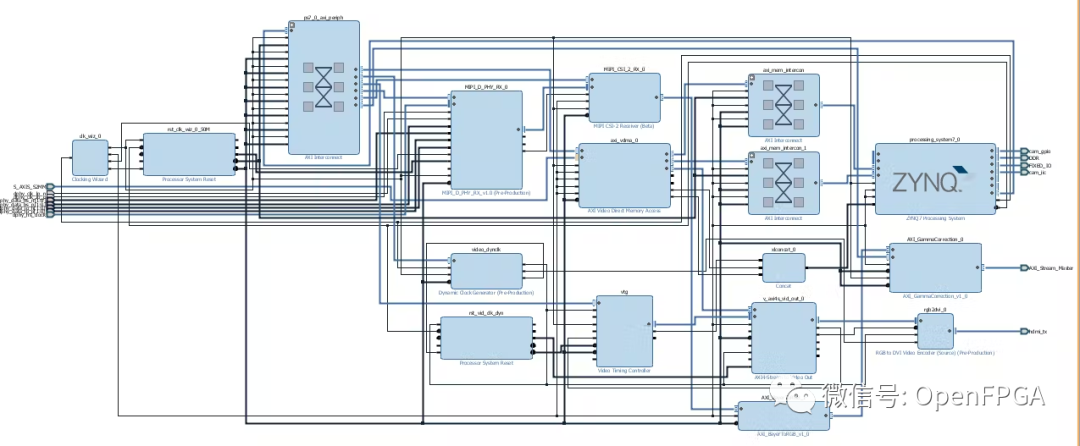
我為每個(gè)行緩沖區(qū)添加了一個(gè) FIFO。
所有模塊都使用規(guī)定好的幀接口 (FI),它與參考設(shè)計(jì)中使用的 AXI Stream 接口非常相似(https://reference.digilentinc.com/learn/programmable-logic/tutorials/zybo-z7-pcam-5c-demo/start),可以在兩者之間進(jìn)行轉(zhuǎn)換。從 AXI Stream 到 Frame 不需要轉(zhuǎn)換,反之則必須生成一些額外的信號(hào)。AXI Stream 接口只有幀開(kāi)始和行結(jié)束控制信號(hào)。
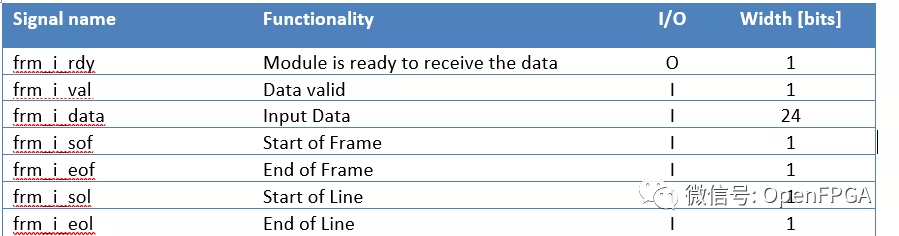
moduleaxi_stream2frame#( parameterDATA_WIDTH=24 )( inputclk,//Systeclock inputrst_n,//Asynchronousresetactivelow //-------------------------Configurationinterface---------------------------------- input[11:0]cfg_img_w,//Imagewidth input[11:0]cfg_img_h,//Imagewidth //-------------------------AXI-Streaminterface------------------------------------- inputm_axi_stream_tuser,//Startofframe inputm_axi_stream_tvalid,//Slavehasvaliddata inputm_axi_stream_tlast,//Endofframe input[DATA_WIDTH-1:0]m_axi_stream_tdata,//Datatransferred outputm_axi_stream_tready,//Masterisreadytoreceive //------------------------------FrameInterface----------------------------------- outputregs_frm_val,//Masterhasvaliddata inputs_frm_rdy,//Slaveisreadytoreceive outputreg[DATA_WIDTH-1:0]s_frm_data,//Datatransferred outputregs_frm_sof,//StartofFrame outputregs_frm_eof,//EndofFrame outputregs_frm_sol,//StartofLine outputregs_frm_eol//EndofLine ); reg[11:0]pix_cnt; reg[11:0]line_cnt; wireinvalrdy; wireoutvalrdy; wireset_eof; assigninvalrdy=m_axi_stream_tvalid&m_axi_stream_tready; assignoutvalrdy=s_frm_rdy&s_frm_val; assignm_axi_stream_tready=s_frm_rdy; assignset_eof=(line_cnt==(cfg_img_h-1'd1))&m_axi_stream_tlast&invalrdy; always@(posedgeclkornegedgerst_n) if(~rst_n)pix_cnt<=?11'd0?????????;?else if(m_axi_stream_tuser?&?invalrdy?)?pix_cnt?<=?11'd0?????????;?else?//?Reset?at?start?of?frame if(m_axi_stream_tlast?&?invalrdy?)?pix_cnt?<=?11'd0?????????;?else?//?Reset?at?end?of?frame if(invalrdy??????????????????????)?pix_cnt?<=?pix_cnt?+?1'd1;??????//?Increment?at?each?pixel always@(posedge?clk?or?negedge?rst_n) if(~rst_n???????????????????????)?line_cnt?<=?11'd0??????????;?else if(m_axi_stream_tuser?&?invalrdy)?line_cnt?<=?11'd0??????????;?else?//?Reset?at?start?of?frame if(m_axi_stream_tlast?&?invalrdy)?line_cnt?<=?line_cnt?+?1'd1;??????//?Increment?at?each?pixel always@(posedge?clk?or?negedge?rst_n) if(~rst_n??????????????????????????????)?s_frm_sol?<=?1'b0;?else if(outvalrdy?&?s_frm_sol???????????????)?s_frm_sol?<=?1'b0;?else?//?Reset?sol?is?transmitted if(m_axi_stream_tuser?&?invalrdy???????)?s_frm_sol?<=?1'b1;?else?//?Set?start?of?line?after?last?pixel?of?line?is?transmitted if(outvalrdy?&?s_frm_eol?&?(~s_frm_eof))?s_frm_sol?<=?1'b1;??????//?Set?at?start?of?frame always@(posedge?clk?or?negedge?rst_n) if(~rst_n???????????????)?s_frm_eof?<=?1'b0;?else if(outvalrdy?&?s_frm_eof)?s_frm_eof?<=?1'b0;?else?//?Reset?after?eof?is?transmitted if(set_eof??????????????)?s_frm_eof?<=?1'b1;??????//?Set?when?last?pixel?is?received always@(posedge?clk?or?negedge?rst_n) if(~rst_n????????????????????????????)?s_frm_val?<=?1'b0;?else if(s_frm_rdy?&?(~m_axi_stream_tvalid))?s_frm_val?<=?1'b0;?else?//?Reset?when?ready?and?no?valid?data?at?the?input if(invalrdy??????????????????????????)?s_frm_val?<=?1'b1;???//?Set?if?data?is?received always@(posedge?clk?or?negedge?rst_n) if(~rst_n???????????????????????)?s_frm_eol?<=?1'b0;?else if(outvalrdy?&?s_frm_eol????????)?s_frm_eol?<=?1'b0;?else?//?Reset?after?eol?is?transmitted if(m_axi_stream_tlast?&?invalrdy)?s_frm_eol?<=?1'b1;??????//?Set?when?last?pixel?in?a?row?is?received always@(posedge?clk?or?negedge?rst_n) if(~rst_n????????????????????????)?s_frm_sof?<=?1'b0;?else if(outvalrdy?&?s_frm_sof?????????)?s_frm_sof?<=?1'b0;?else?//?Reset?after?sof?is???????????????????????????????transmitted if(m_axi_stream_tuser??&?invalrdy)?s_frm_sof?<=?1'b1;??????//?Set?when?first?pixel?is?received always@(posedge?clk?or?negedge?rst_n) if(~rst_n??)?s_frm_data?<=?{(DATA_WIDTH){1'b0}};?else if(invalrdy)?s_frm_data?<=?m_axi_stream_tdata??; endmodule?//axi_stream2Frame
配置sensor
這個(gè)攝像頭是搭配樹(shù)莓派使用的,所有驅(qū)動(dòng)都是閉源的,所以沒(méi)有配置示例。我在 SCL 和 SDA 引腳上的 I2C 引腳上焊接了兩根電線。將相機(jī)連接到 Raspeberry Pi 并將邏輯分析儀連接到焊線,我按照相機(jī)接口指南
https://projects.raspberrypi.org/en/projects/getting-started-with-picamera
邏輯分析儀解碼了I2C,抓取的值將在最后附上excel。

該配置已添加到 C++ 代碼中。
攝像頭是 RGB 攝像頭,只有在房間黑暗時(shí)才會(huì)啟動(dòng)紅外攝像頭。為了解決這個(gè)問(wèn)題,我在sensor前面粘上了一塊塑料,這是紅外 LED 前面的過(guò)濾器。這不是一個(gè)很好的解決方案,但可以。
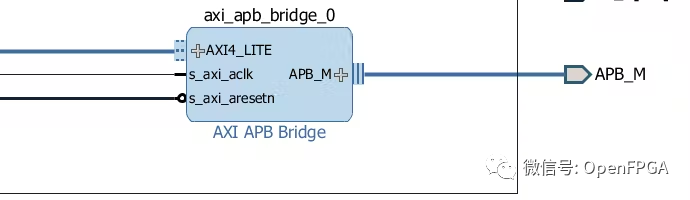
配置模塊
使用 APB 接口進(jìn)行配置。
voidfilter_cfg()
{
Xil_Out32(APB_BASE_ADDR+CFG_IMG_WIDTH_ADDR,IMG_W);
Xil_Out32(APB_BASE_ADDR+CFG_IMG_HEIGHT_ADDR,IMG_H);
Xil_Out32(APB_BASE_ADDR+CFG_PIX_CORR_SEL_ADDR,0);
Xil_Out32(APB_BASE_ADDR+CFG_SHARP_SEL_ADDR,0);
Xil_Out32(APB_BASE_ADDR+CFG_SMOOTH_SEL_ADDR,0);
Xil_Out32(APB_BASE_ADDR+CFG_MEDIAN_SEL_ADDR,0);
Xil_Out32(APB_BASE_ADDR+CFG_LAPLACE_SEL_ADDR,0);
Xil_Out32(APB_BASE_ADDR+CFG_OUTPUT_SEL_ADDR,0);
Xil_Out32(APB_BASE_ADDR+CFG_PIX_CORR_THR_ADDR,0);
Xil_Out32(APB_BASE_ADDR+CFG_SHARP_COEF_ADDR,0);
Xil_Out32(APB_BASE_ADDR+CFG_TEST_MODE_EN_ADDR,0);
}
上面給出的配置是每個(gè)選擇器模塊的選擇。現(xiàn)在它被配置為輸入流不進(jìn)行任何處理的情況下轉(zhuǎn)到輸出。
voidfilter_cfg()
{
Xil_Out32(APB_BASE_ADDR+CFG_IMG_WIDTH_ADDR,IMG_W);
Xil_Out32(APB_BASE_ADDR+CFG_IMG_HEIGHT_ADDR,IMG_H);
Xil_Out32(APB_BASE_ADDR+CFG_PIX_CORR_SEL_ADDR,0);
Xil_Out32(APB_BASE_ADDR+CFG_SHARP_SEL_ADDR,0);
Xil_Out32(APB_BASE_ADDR+CFG_SMOOTH_SEL_ADDR,SMOOTH_IN_CODE);
Xil_Out32(APB_BASE_ADDR+CFG_MEDIAN_SEL_ADDR,0);
Xil_Out32(APB_BASE_ADDR+CFG_LAPLACE_SEL_ADDR,SMOOTH_IN_CODE);
Xil_Out32(APB_BASE_ADDR+CFG_OUTPUT_SEL_ADDR,LAPLACE_IN_CODE);
Xil_Out32(APB_BASE_ADDR+CFG_PIX_CORR_THR_ADDR,0);
Xil_Out32(APB_BASE_ADDR+CFG_SHARP_COEF_ADDR,0);
Xil_Out32(APB_BASE_ADDR+CFG_TEST_MODE_EN_ADDR,0);
}
Xil_Out32(APB_BASE_ADDR+CFG_SMOOTH_SEL_ADDR,SMOOTH_IN_CODE);
將輸入視頻流放入算法核心。
演示
我展示了帶平滑和不帶平滑的拉普拉斯濾波器,我們可以觀察到圖像有噪聲,應(yīng)用平滑濾波器后圖像有所變化。
為了比較原始圖像和處理后的兩個(gè)圖像,在 Gamma 校正之后添加了第二個(gè) VDMA,,現(xiàn)在校正后的圖像和原始圖像都在 DDR 中,因此可以復(fù)制裁剪處理后的圖像并將裁剪區(qū)域替換為原始圖像。
工程鏈接
I2C 解碼的 csv
https://github.com/hszilard13/Infa-red-based-Image-processing-Zybo/blob/master/config_1080p_rgb.csv
整體工程
https://github.com/hszilard13/Infared-based-Image-processing-Zybo
審核編輯:湯梓紅
-
FPGA
+關(guān)注
關(guān)注
1629文章
21729瀏覽量
602984 -
led
+關(guān)注
關(guān)注
242文章
23252瀏覽量
660558 -
光源
+關(guān)注
關(guān)注
3文章
703瀏覽量
67766 -
圖像處理
+關(guān)注
關(guān)注
27文章
1289瀏覽量
56722 -
I2C
+關(guān)注
關(guān)注
28文章
1484瀏覽量
123619
原文標(biāo)題:工程鏈接
文章出處:【微信號(hào):Open_FPGA,微信公眾號(hào):OpenFPGA】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
DSP+FPGA+ASIC設(shè)計(jì)的實(shí)時(shí)紅外圖像處理系統(tǒng)
公司項(xiàng)目外包:圖像處理(FPGA實(shí)現(xiàn))
怎么設(shè)計(jì)多DSP紅外實(shí)時(shí)圖像處理系統(tǒng)?
如何設(shè)計(jì)多DSP紅外實(shí)時(shí)圖像處理系統(tǒng)?
【FPGA開(kāi)發(fā)者項(xiàng)目連載】基于FPGA的紅外激光圖像采集及顯示
基于FPGA的紅外圖像處理系統(tǒng)及算法設(shè)計(jì)
如何使用DSP和FPGA實(shí)現(xiàn)紅外圖像銳化算法的實(shí)現(xiàn)

FPGA中如何使用Verilog處理圖像
優(yōu)秀的 Verilog/FPGA開(kāi)源項(xiàng)目介紹(一)

紅外線板開(kāi)源項(xiàng)目

TTL FPGA開(kāi)源項(xiàng)目
優(yōu)秀的IC/FPGA開(kāi)源項(xiàng)目(二)-NetFPGA






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論