") 智能駕駛系統(tǒng)傳感器布置位置及方式探究
智能駕駛系統(tǒng)傳感器布置位置及方式探究
自動駕駛運用了多種傳感器(超聲波雷達、毫米波雷達、智能攝像頭、高清/標清攝像頭、激光雷達等),各類不同的硬件傳感器,對于傳感器探測性能提出了不同程度的要求,而對于探測性能影響尤為重要的一點就是傳感器的布置位置和布置方式。
高級駕駛輔助系統(tǒng)傳感器介紹
高級駕駛輔助系統(tǒng)(Advanced Driving Assistance System,ADAS)是利用傳感器,在汽車行駛過程中實時感應(yīng)周圍的環(huán)境,收集數(shù)據(jù),感知融合并對感知數(shù)據(jù)進行決策分析,最后對車輛進行控制和對駕駛員進行預(yù)警。
攝像頭能獲取包括物體顏色、外形、材質(zhì)等豐富的環(huán)境信息,并且2D計算機視覺已取得很多進展,該領(lǐng)域有許多先進的算法用于信號燈檢測、物體分類等。毫米波雷達能夠獲取精準的距離信息,穿透能力強,能夠抵抗天氣和環(huán)境變化的影響,可實現(xiàn)遠距離感知探測。
目前量產(chǎn)的自動駕駛汽車上的傳感器種類有4種,數(shù)量為22個(表1)。
表1 高級輔助駕駛系統(tǒng)傳感器分類

1.1 前視智能攝像頭
常用有單、雙和三目,主要應(yīng)用于中遠距離場景,能識別清晰的車道線、交通標識、障礙物和行人,但對光照、天氣等條件很敏感,而且需要復(fù)雜的算法支持,對處理器的要求也比較高。
1.2 毫米波雷達
主要有用于中短測距的24 GHz雷達和長測距的77 GHz雷達2種。毫米波雷達可有效提取景深及速度信息,識別障礙物,有一定的穿透霧、煙和灰塵的能力,但在環(huán)境障礙物復(fù)雜的情況下,由于毫米波依靠聲波定位,聲波出現(xiàn)漫反射,導致漏檢率和誤差率比較高。
1.3 超聲波雷達
主要應(yīng)用于短距離場景下,發(fā)送超聲波與接收反射超聲波信號,并把探測結(jié)果發(fā)送給控制器。超聲波的能量消耗較緩慢,穿透性強,測距的方法簡單,成本低。但是它在速度很高情況下測量距離有一定的局限性,當汽車高速行駛時,使用超聲波測距無法跟上汽車的車距實時變化,誤差較大。超聲波散射角大,方向性較差,在測量較遠距離的目標時,其回波信號會比較的弱,影響測量精度。但是,在短距離測量中,超聲波測距傳感器具有非常大的優(yōu)勢。
1.4 環(huán)視攝像頭
主要應(yīng)用于短距離場景,可識別障礙物,但對光照、天氣等外在條件很敏感,技術(shù)成熟,價格低廉。隨著技術(shù)的不斷發(fā)展進步,攝像頭的像素也在逐步提升,從最開始的30萬像素,提升到目前的100萬像素,未來3年內(nèi)200萬像素的攝像頭將會普及。
傳感器實現(xiàn)功能配置組合
高級駕駛輔助系統(tǒng)的不同傳感器之間的組合,可以實現(xiàn)不同的功能,上述介紹的22個傳感器全部搭載到整車,可實現(xiàn)ADASL1/L2/L3,下面介紹詳細的子功能。
2.1 前向智能攝像頭和前向毫米波雷達
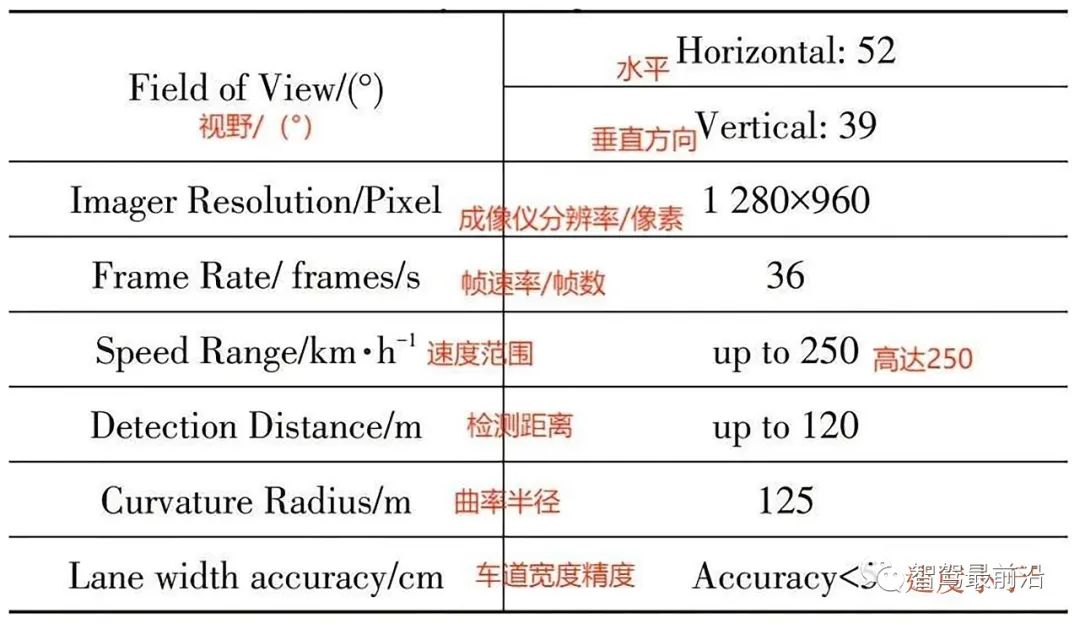
前向智能攝像頭實現(xiàn)AEB-C(自動緊急制動-車)、LDW(車道偏離預(yù)警)、LKA(車道保持輔助)、TSR(交通標志識別),實現(xiàn)L1級駕駛輔助。道路實際情況探測精準(如車道線、隧道、匝道、限速等),但是距離探測不精準。其代表性能參數(shù)見表2。
表2MobileyeEYEQ3部分性能參數(shù)
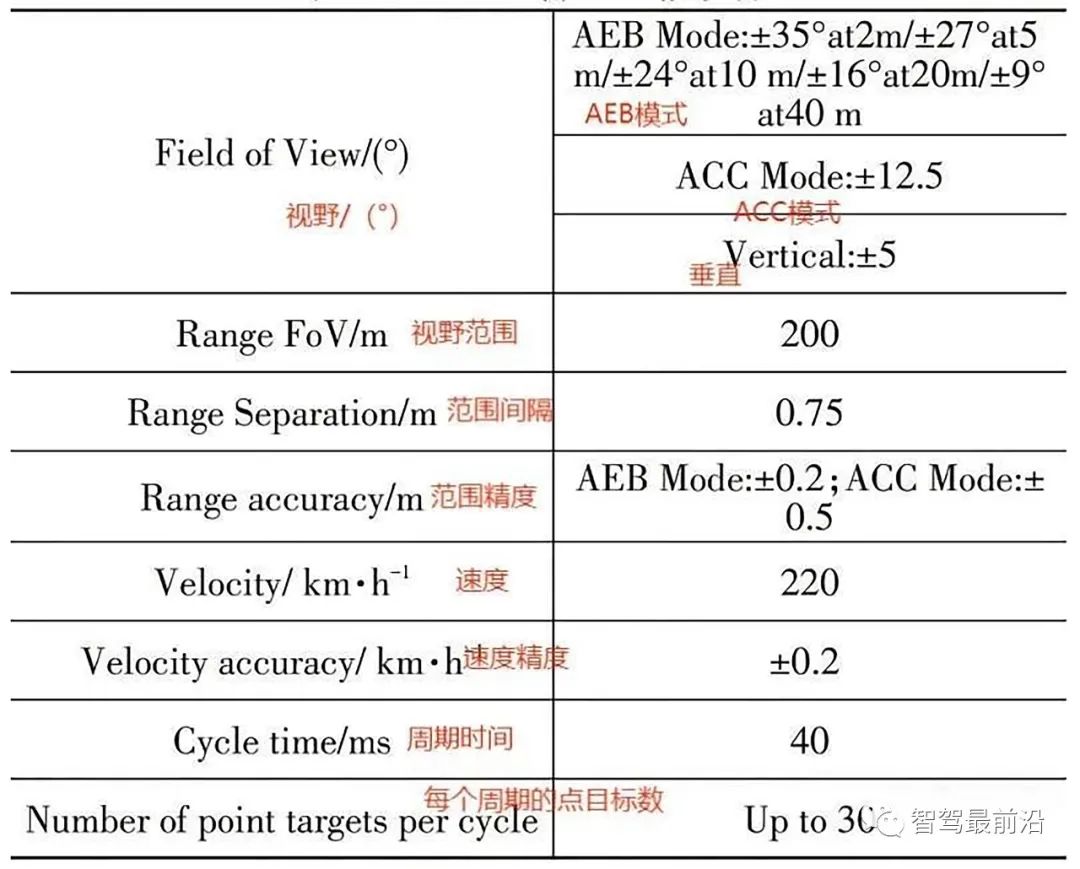
前向毫米波雷達(77 GHz)實現(xiàn)ACC(自適應(yīng)巡航)、AEB-C(自動緊急制動-車)、FCW(前向碰撞預(yù)警),實現(xiàn)L1級駕駛輔助。距離探測精準,但是無法預(yù)測實際情況(如車道線、隧道、匝道、限速等)。其代表性能參數(shù)見表3。
表3AC1000部分性能參數(shù)
前向智能攝像頭和前向毫米波雷達融合,實現(xiàn)ACC、AEB-C/P自動緊急制動-車/人)、LDW、LKA、TSR、TJA(交通擁堵輔助)、ICA(智能巡航輔助),能實現(xiàn)L2級駕駛輔助(圖1)。距離和道路信息均是融合后的數(shù)據(jù),探測精準。單雷達、單攝像頭以及融合方案的對比見表4。
表4 單雷達、單攝像頭以及融合方案的對比
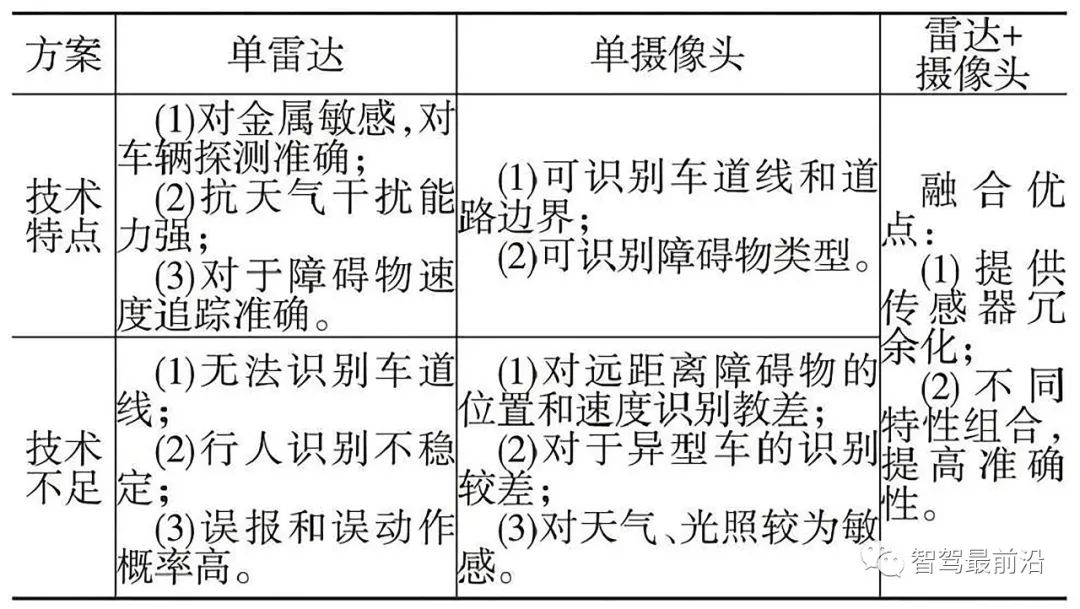
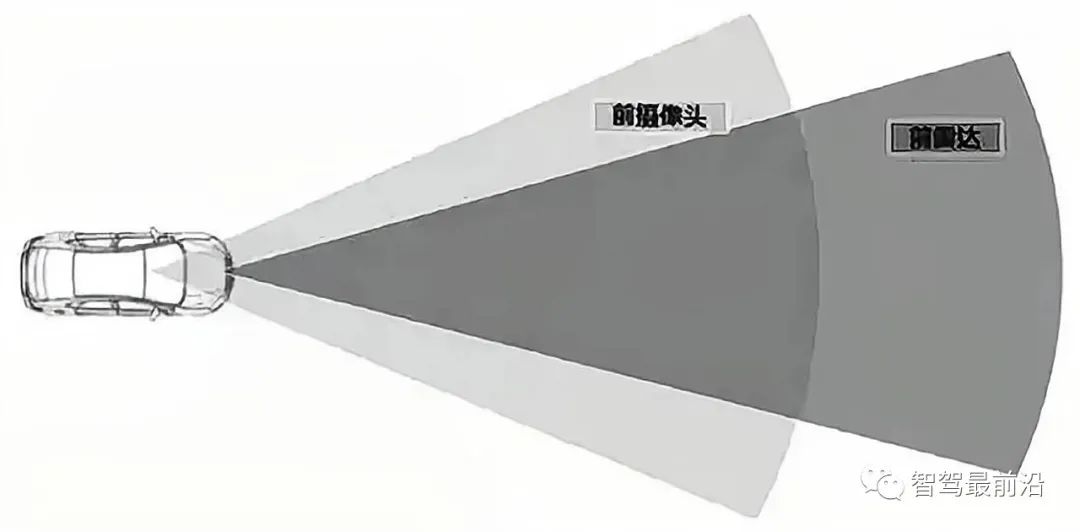
圖1前向智能攝像頭和前向毫米波雷達融合
2.2 側(cè)向毫米波雷達(角雷達)
側(cè)向毫米波雷達(24GHz)實現(xiàn)盲區(qū)監(jiān)測功能,有2種實現(xiàn)方式。后側(cè)方面2個毫米波雷達,實現(xiàn)BSD(盲區(qū)監(jiān)測)、LCW(變道碰撞預(yù)警)、RCTA(后方交通穿行預(yù)警)和DOW(開門預(yù)警)功能;后側(cè)2個毫米波雷達+前側(cè)2個毫米波雷達,除了實現(xiàn)以上功能外,還能實現(xiàn)FCTA(前方交叉路口預(yù)警),支持L2級以上的高級駕駛輔助功能。隨著科技進步,側(cè)向毫米波雷達性能也在逐步提升,見表5。
表5側(cè)向毫米波雷達部分參數(shù)和發(fā)展

側(cè)向毫米波雷達(4個)、前向毫米波雷達(1個)、前向智能攝像頭(1個)組合使用,可實現(xiàn)L2+(或L3-)級自動駕駛。在L2級自動駕駛上,增加TJA/HWAML(高速公路駕駛輔助—多車道)、ALC(主動變道輔助)、TLC(觸發(fā)式變道輔助)、ELK(緊急車道保持)、ESA(緊急轉(zhuǎn)向輔助)、JA(十字路口輔助)、全方位預(yù)警(含BSD/DOW/RCTA/FCTA/LCW)(圖2)。可高速公路工況下,實現(xiàn)自動駕駛功能。
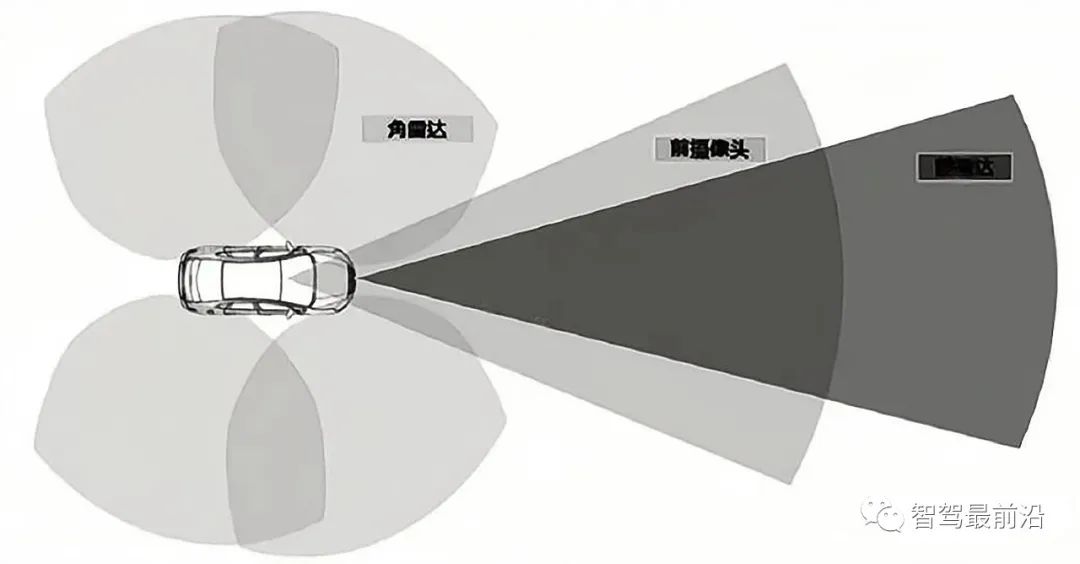
圖2前向攝像頭、前向毫米波雷達、角雷達融合
2.3 超聲波雷達
根據(jù)超聲波雷達短距離探測目標物的特點(表6),超聲波雷達根據(jù)不同數(shù)量組合,可實現(xiàn)PDC(倒車雷達)、APA(自動泊車輔助)和BSD(盲區(qū)監(jiān)測)功能。后保險杠上安裝4個超聲波雷達,可實現(xiàn)PDC功能,有些車輛在前保險杠上同時安裝4個超聲波雷達(前后共8個超聲波雷達),倒車時探測前方障礙物。在前后保險杠側(cè)面安裝4個超聲波雷達,可實現(xiàn)近距離盲區(qū)監(jiān)測功能,同時結(jié)合前后8個超聲波雷達,共12個超聲波雷達,能實現(xiàn)APA功能。如果車輛側(cè)面安裝有毫米波角雷達,實現(xiàn)BSD功能,則側(cè)面的超聲波雷達就不用安裝。BSD安裝超聲波雷達的主要要因是其成本優(yōu)勢。超聲波雷達不同組合及功能見圖3。
表6超聲波雷達部分參數(shù)及特點
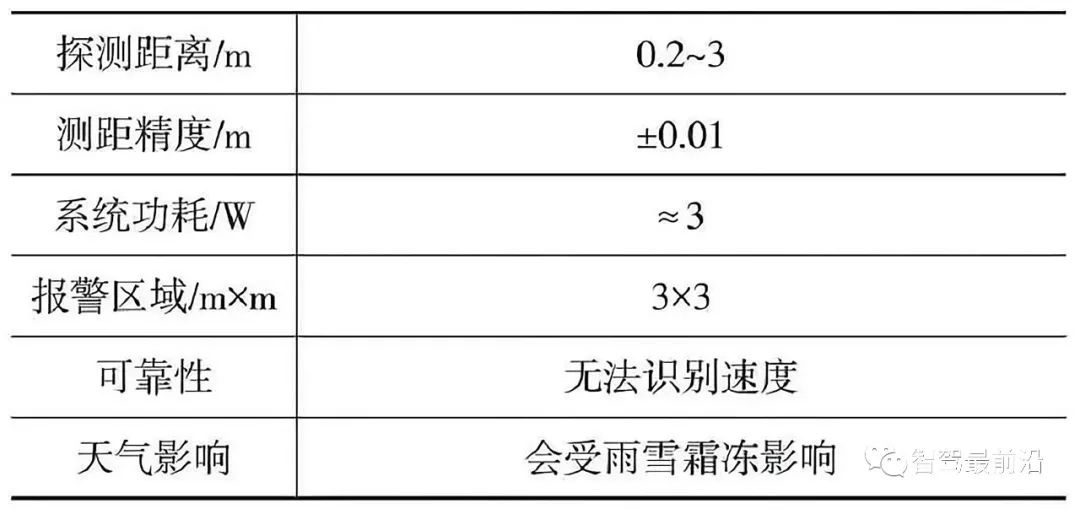
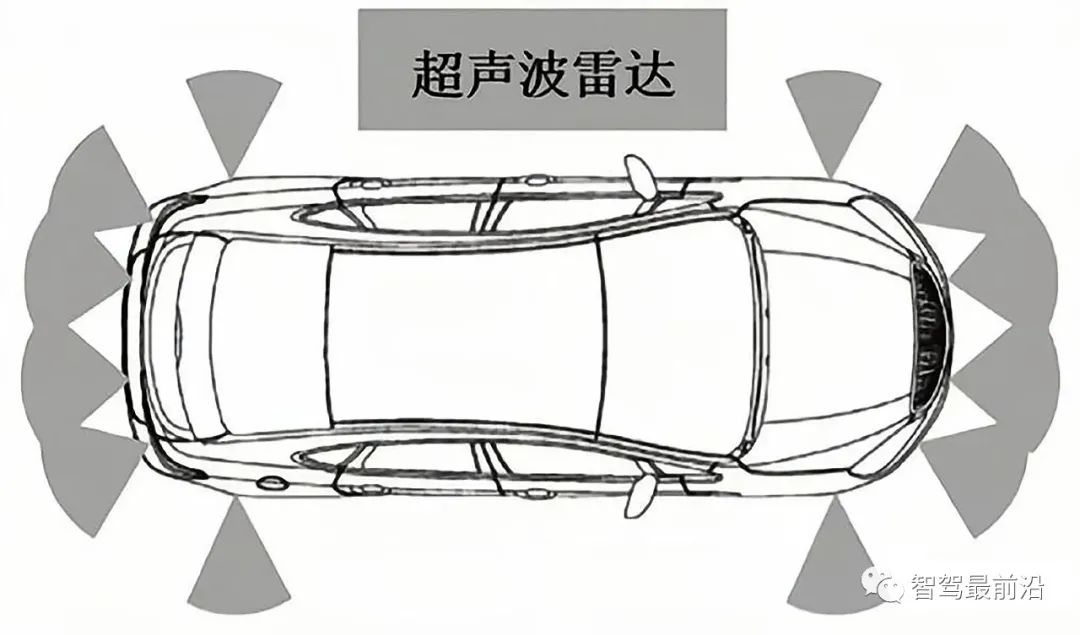
圖3 超聲波雷達方案布局
2.4 環(huán)視攝像頭
AVM(全景式監(jiān)控影像系統(tǒng))通過前后左右4個圖像傳感器(環(huán)視攝像頭)采集車輛周邊環(huán)境數(shù)據(jù),將影像通過CVBS(標清)/LVDS(高清)傳遞給全景影像控制器。如果僅在后方裝1個攝像頭,可實現(xiàn)倒車影像功能。如果同時在前后左右安裝4個攝像頭,通過對4個攝像頭輸入圖像進行畸變校正及裁剪,實現(xiàn)4個視圖及2D俯視圖效果集成,3D旋轉(zhuǎn)效果(高清方案)集成,最終通過MP5進行顯示。環(huán)視攝像頭部分重要參數(shù)見表7,其布置在整車示意見圖4。
表7環(huán)視攝像頭部分參數(shù)
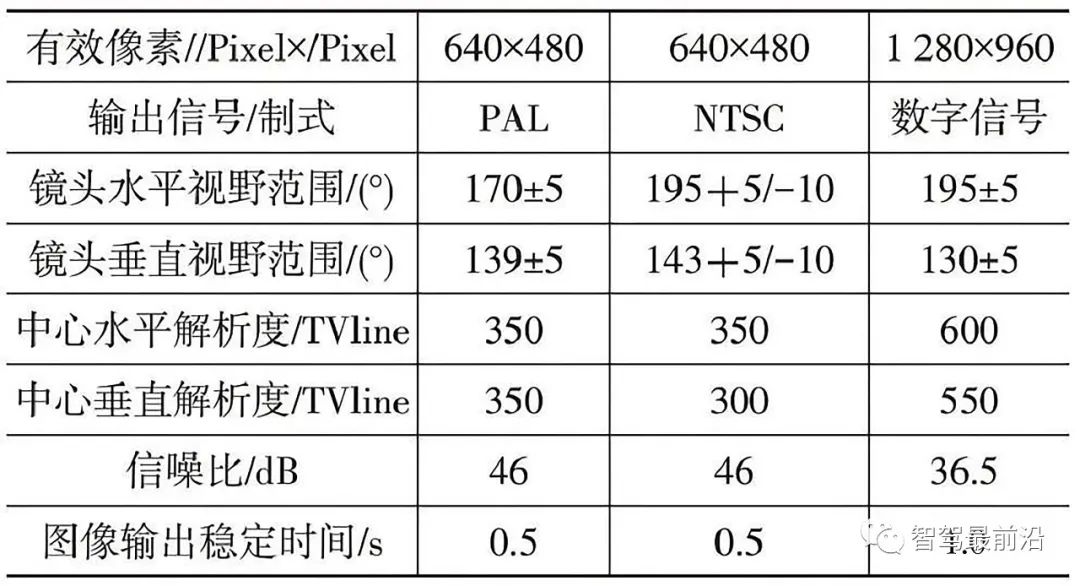
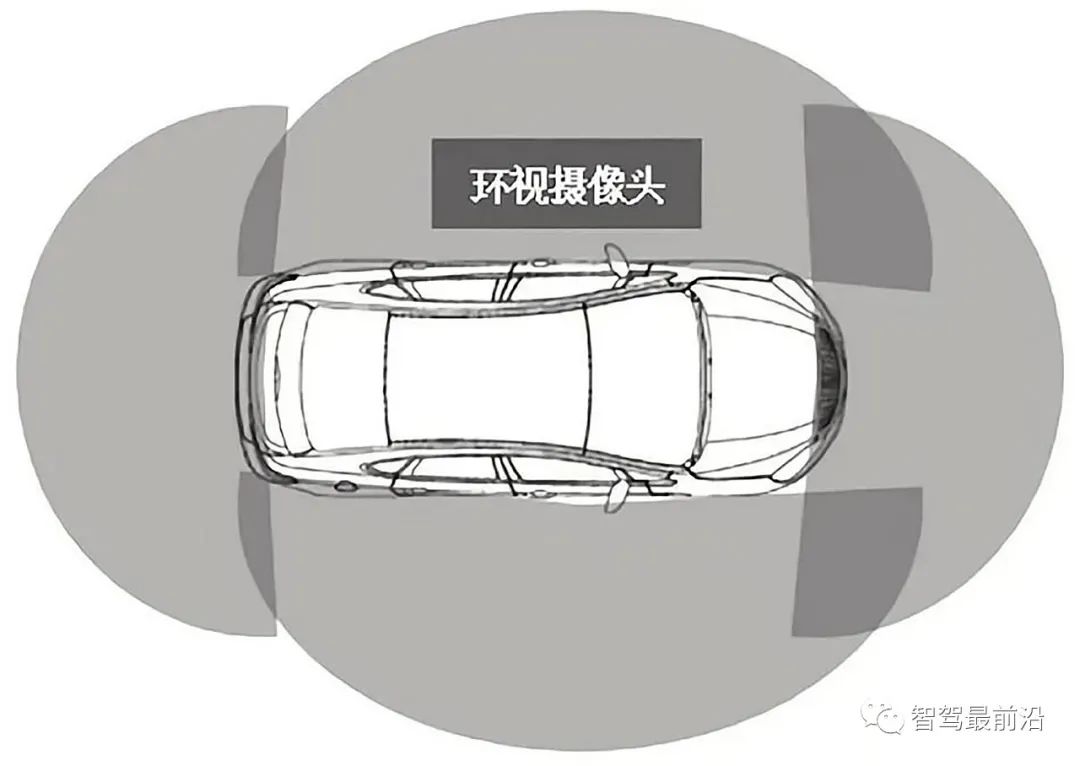
圖4環(huán)視攝像頭方案布局
傳感器整車布置融合
高級駕駛輔助系統(tǒng)的不同傳感器之間的組合布置,需要考慮到覆蓋范圍和冗余性。不同傳感器的感知范圍均有各自的優(yōu)點和局限性,現(xiàn)在發(fā)展的趨勢是通過傳感器信息融合技術(shù),彌補單個傳感器的缺陷,提高整個智能駕駛系統(tǒng)的安全性和可靠性。覆蓋范圍:車體360°均需覆蓋,根據(jù)重要性,前方的探測距離要長(120m),后方的探測距離稍短(80m),左右側(cè)的探測距離最短(20m)。為了保證安全性,每塊區(qū)域需要2個或2個以上的傳感器覆蓋,以便相互校驗,如圖5所示為布置方案。
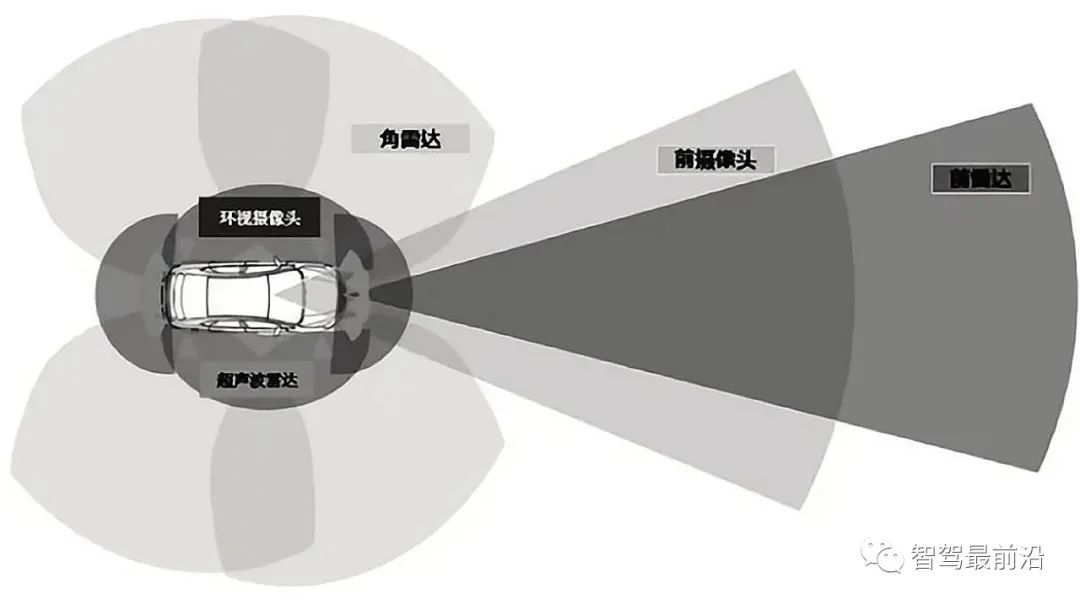
圖5傳感器布置融合示意
3.1 前向智能攝像頭和前向毫米波雷達布置融合
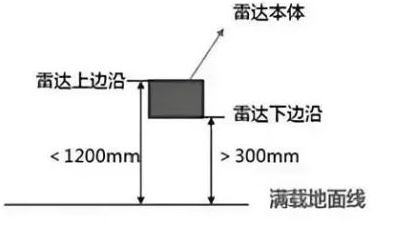
前雷達安裝位置根據(jù)雷達性能參數(shù)要求、車身造型,設(shè)定合理的布置位置。雷達離地高度(雷達天線軸到地面的距離)推薦50cm,30cm到120cm之間都可接受。離地高度接近30cm可能會有過多的地面反射信號干擾直接信號接收和降低探測的風險。雷達與保護蓋之間的距離大于15mm(2倍波長,可以避免復(fù)雜近場對雷達波束的影響),小于40mm(以避免過大的雷達波相交面)。雷達橫向位置坐標在-30cm到30cm之間。雷達如果安裝前蓋板,對蓋板也有特殊要求,比如曲率半徑>600mm、波束與蓋板相交部分厚度均一、型面需要經(jīng)過仿真測試、材質(zhì)需要進行材料電性能測試、非噴涂件等。毫米波雷達波束與周邊結(jié)構(gòu)間距>5mm,與車輛角度-俯仰角、偏航角、側(cè)傾角為0°,雷達FOV與牌照框距離15mm以上,避免安裝牌照后影響雷達探測等等要求。如圖6所示。
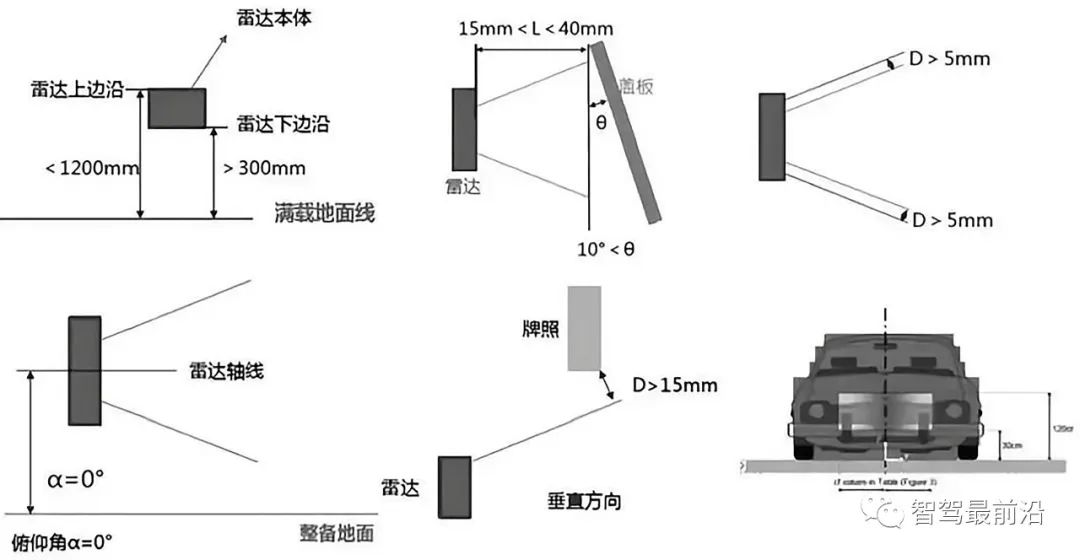
圖6 前向毫米波雷達布置示意
前攝像頭最好的垂直安裝位置是在擋風玻璃的中心,高度在1200mm以上為佳,可以允許偏移擋風玻璃中心線在10cm以內(nèi)。偏航角、側(cè)傾角、俯仰角最好為0°附近(±3°)。支架應(yīng)該安裝在干凈的玻璃區(qū)域,視角區(qū)域不能被絹印或者印刷遮擋。攝像頭視窗與雨刮軌跡線間距大于30mm,鏡頭模塊與擋風玻璃的之間間隙應(yīng)該保證最小1mm。開口應(yīng)該由投影在擋風玻璃各層的視角決定,攝像頭支架和罩蓋上應(yīng)設(shè)計通風孔(開孔面積大于120mm2),保證空氣流通。支架安裝在擋風玻璃的位置公差通常是±1mm(定位)和±2.5°(旋轉(zhuǎn))(圖7)。
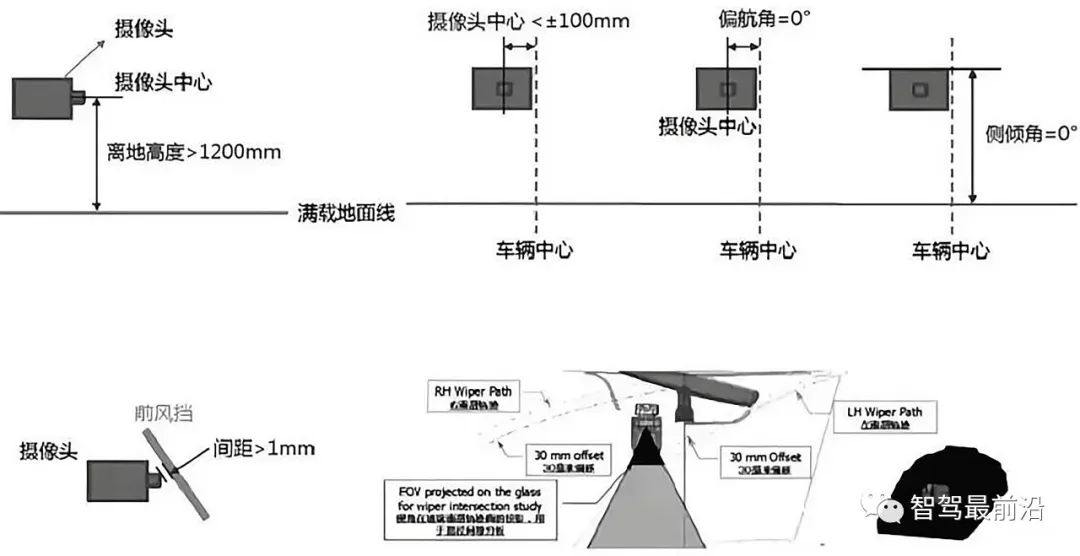
圖7前攝像頭布置示意
3.2 側(cè)向毫米波雷達(角雷達)布置融合
角雷達根據(jù)其性能參數(shù)要求、車身造型,設(shè)定合理的布置位置,車身要預(yù)留布置空間。角雷達布置高度要求:過低泥水污物影響雷達,太高離車輛近處的盲區(qū)會變大(可能會導致±20°以外無視野),推薦高度在400mm到1000mm之間。要達到盲區(qū)最小化,雷達與車輛縱軸線的夾角要在30°到45°之間為宜,雷達與車輛水平面夾角最好控制在90°。雷達FOV視野內(nèi)無金屬,棱線,多層結(jié)構(gòu)或材質(zhì),F(xiàn)OV與覆蓋件的最大角度為70°,覆蓋件要求平整,曲率要求大于350mm。
3.3 超聲波雷達布置融合
為了實現(xiàn)APA功能,整車上要布置12個超聲波雷達,布置數(shù)量較多。超聲波雷達傳感器安裝支架上,通過與保險杠蒙皮的粘接固定上。為了最大限度滿足探測要求,超聲波雷達布置位置提供了具體要求,見圖8。布置具體要求有:避免將雷達布置在凹陷于汽車保保杠的表面、避免拍照干涉雷達探測區(qū)域、遠離熱源排氣管、大功率燈具等等。
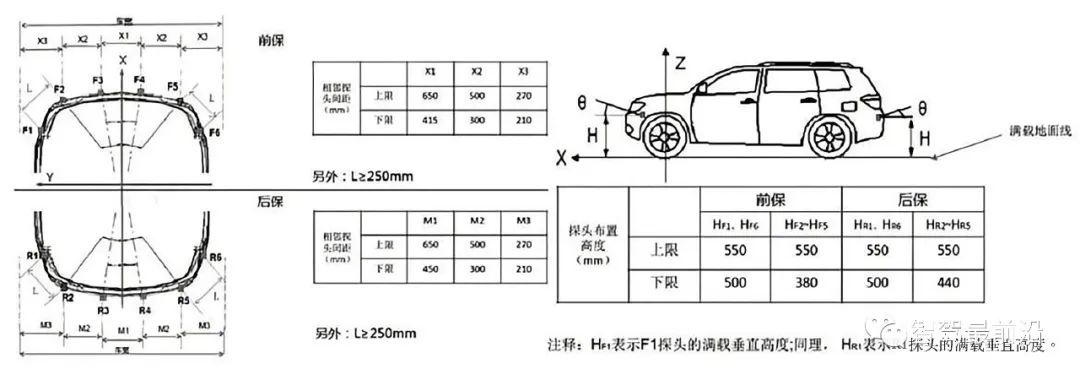
圖8 超聲波雷達布置位置要求
3.4環(huán)視攝像頭
AVM環(huán)視系統(tǒng),共需在車身前后左右布置4個攝像頭。前方攝像頭安裝在前格柵附近區(qū)域。后方攝像頭安裝在后背門牌照燈或附近區(qū)域。左右側(cè)攝像頭需要安裝在后視鏡殼底部,需要在左右后視鏡中預(yù)留一個攝像頭的孔位,以便于左右攝像頭的安裝。攝像頭布置時應(yīng)進行光學校核,保證相鄰攝像頭影像有足夠的重合,并且在攝像頭1°的組裝誤差范圍內(nèi)應(yīng)能保證圖像拼接無黑邊,盲區(qū)不能超過企業(yè)標準所要求。為防止拍攝影像的改變,而導致全景影像無法拼接,攝像頭應(yīng)具有防旋轉(zhuǎn)的定位結(jié)構(gòu)。
前后攝像頭布置要求:車輛滿載時,離地高度≥600mm;偏離中心平面距離≤50mm,建議置于中心平面;視軸與車輛XZ平面平行;視軸與車輛Z軸夾角建議45°到75°,光軸與地面線交點距車身最外側(cè)1000~2000mm;盲區(qū)視野≤200mm;攝像頭垂直視野在3000mm處可完整看到直立于地面3000mm高的物體。如圖9為環(huán)視攝像頭(前)布置要求。
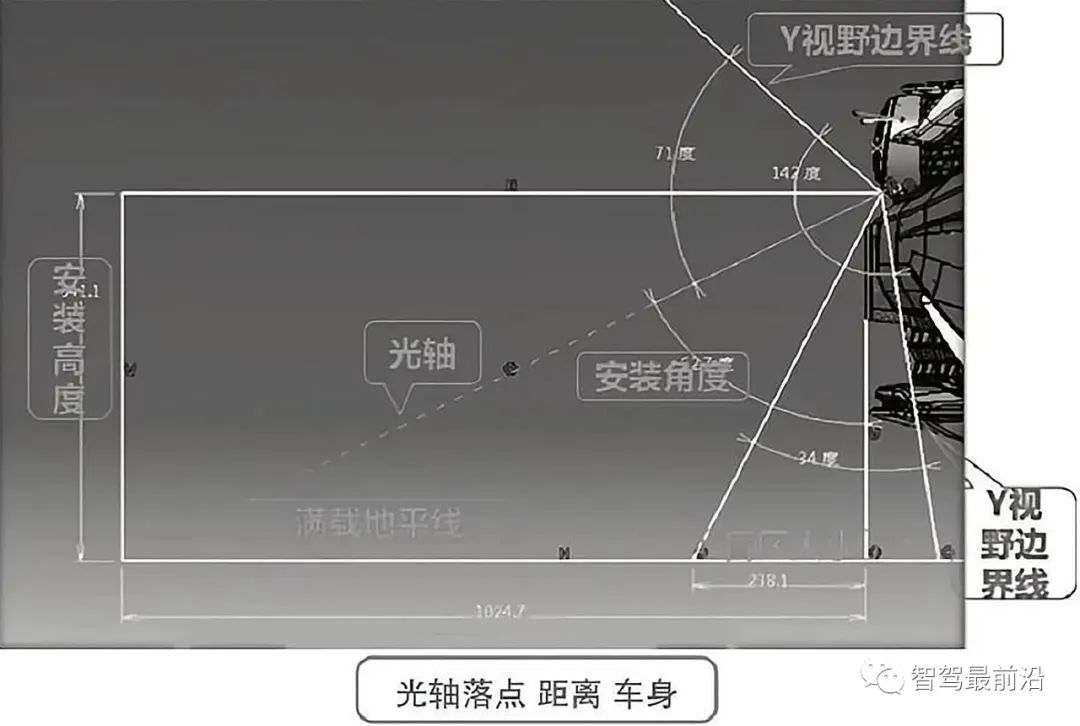
圖9 環(huán)視攝像頭(前)布置要求
左右攝像頭(后視鏡上)布置要求:攝像頭前視圖,視角與垂直線之間夾角建議20~25°;視角與垂直線之間夾角建議1.5~5°;安裝高度大于900mm;車身突出距離大于100mm;視野需覆蓋車輛前后各10m位置,且10m的視野線與后視鏡殼體下邊緣距離大于1mm,前后5m的視野線與光軸面夾角均小于85°,且5m的視野線與后視鏡殼體下邊緣最小距離大于1.2mm;攝像頭外突小于5mm(可調(diào)節(jié))。
總 結(jié)
高級駕駛輔助系統(tǒng)的傳感器除了要保證探測范圍的覆蓋冗余度,在實際安裝中,還要符合每個傳感器和車輛的安裝條件。
審核編輯:湯梓紅
-
傳感器
+關(guān)注
關(guān)注
2550文章
51038瀏覽量
753086 -
攝像頭
+關(guān)注
關(guān)注
59文章
4837瀏覽量
95600 -
adas
+關(guān)注
關(guān)注
309文章
2183瀏覽量
208632 -
智能駕駛
+關(guān)注
關(guān)注
3文章
2505瀏覽量
48737 -
自動駕駛
+關(guān)注
關(guān)注
784文章
13784瀏覽量
166399
原文標題:智能駕駛系統(tǒng)傳感器布置位置及方式探究
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
高級駕駛輔助系統(tǒng)傳感器布置位置及方式探究
高級駕駛輔助系統(tǒng)的傳感器布置策略
可擴展圖像傳感器平臺用于先進駕駛輔助系統(tǒng)和自動駕駛
用于先進駕駛輔助系統(tǒng)和自主駕駛的集成智能傳感器健康監(jiān)測裝置概述
如何利用毫米波雷達和圖像傳感器構(gòu)建智能駕駛控制系統(tǒng)?
基于糧庫壓力場的傳感器網(wǎng)絡(luò)布置模型
自動駕駛汽車的傳感器該如何布置?
自動駕駛的傳感器種類以及布置方案

集成智能傳感器健康監(jiān)測用于先進駕駛輔助系統(tǒng)和自主駕駛






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論