") 聊聊3D激光SLAM開(kāi)源算法-LeGo-LOAM
聊聊3D激光SLAM開(kāi)源算法-LeGo-LOAM
SLAM技術(shù)從大的類(lèi)別來(lái)講,可以分為激光SLAM和視覺(jué)SLAM,激光SLAM建圖精度高,但是激光雷達(dá)價(jià)格比較貴,視覺(jué)SLAM的性能目前還和激光SLAM有一定差距,然而相機(jī)成本低,也在快速發(fā)展之中。激光SLAM相對(duì)更成熟一點(diǎn),門(mén)檻也更高一點(diǎn)。
從哪里開(kāi)始學(xué)起,怎樣才能更高效的學(xué)習(xí),進(jìn)入相關(guān)企業(yè)需要達(dá)到什么樣的要求,這也是很多初學(xué)者面臨的難題。
根據(jù)小編的多年經(jīng)驗(yàn),總結(jié)了三點(diǎn):首先,要有扎實(shí)的數(shù)學(xué)基礎(chǔ);其次,要對(duì)整個(gè)SLAM大框架及細(xì)節(jié)部分理解到一定深度;再次,要有比較高度的編程能力。這三點(diǎn)都絕非易事,需要花很大的功夫,中間也有不少?gòu)澛芬摺K赃@門(mén)課程的推出,一方面是帶領(lǐng)大家入門(mén)基于LeGo-LOAM框架的3D激光SLAM技術(shù),另一方面是教大家高效的SLAM學(xué)習(xí)方法。LeGo-LOAM在工業(yè)中有非常廣泛的應(yīng)用,也是應(yīng)聘者必須掌握的框架。
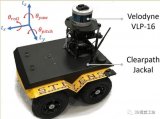
相對(duì)于LOAM算法,LeGo-LAOM能夠進(jìn)行地面優(yōu)化,同時(shí)保證了輕量級(jí),也加入了回環(huán)檢測(cè)模塊。本課程從必備的數(shù)學(xué)知識(shí),到算法框架、源碼,再到最后的實(shí)踐,力求銜接清晰,通俗易懂,便于大家消化吸收。
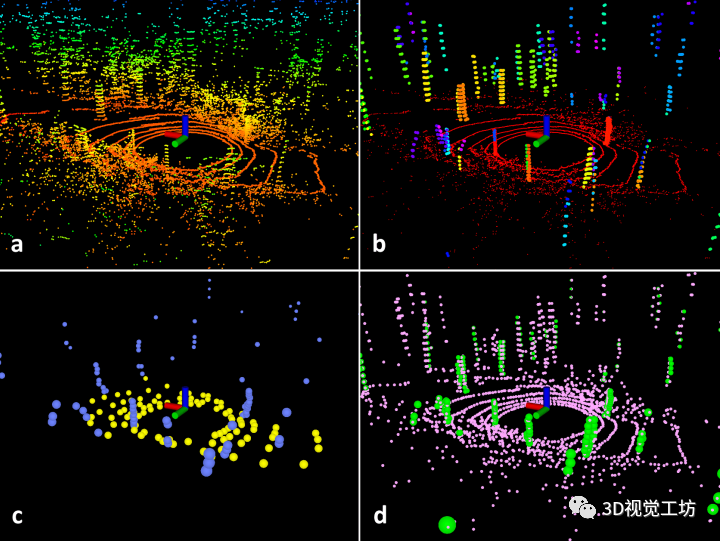
LeGo-LOAM地面優(yōu)化
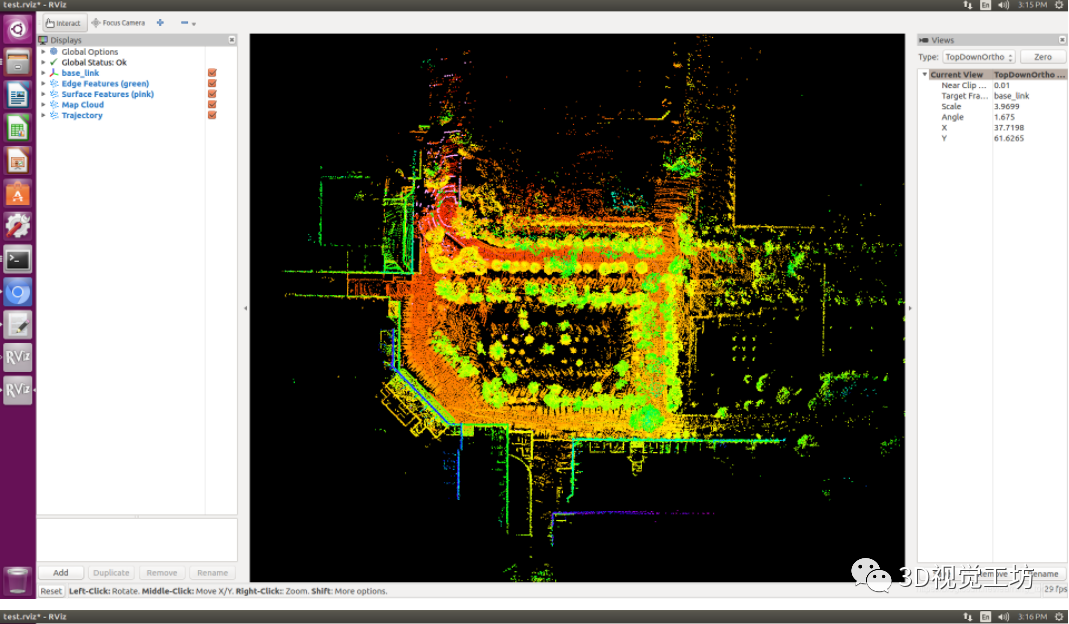
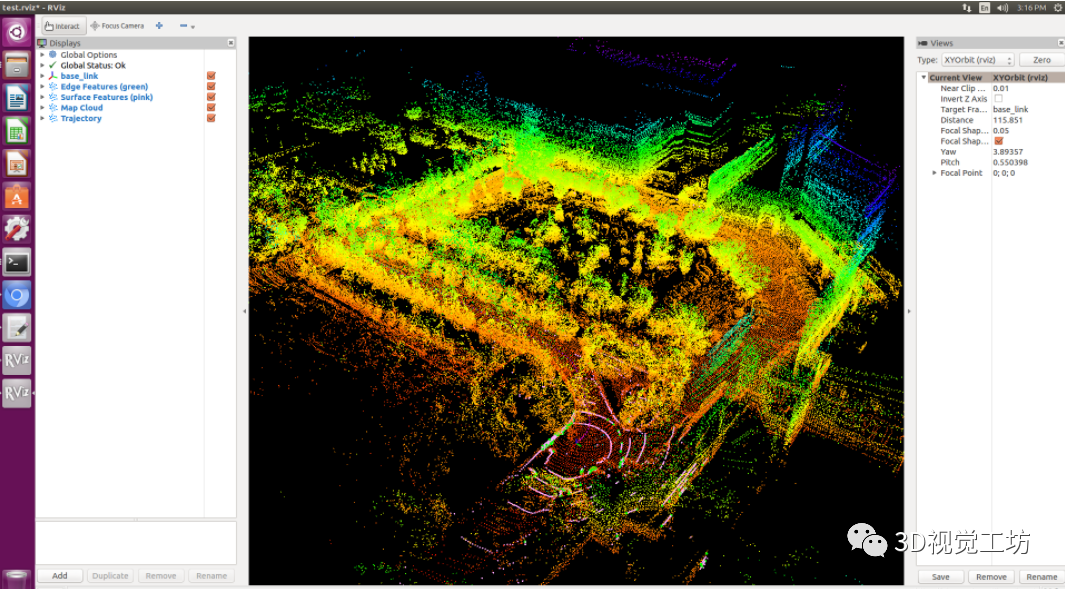
LeGO-LOAM運(yùn)行效果展示:

-
SLAM
+關(guān)注
關(guān)注
23文章
425瀏覽量
31861 -
3D激光
+關(guān)注
關(guān)注
0文章
30瀏覽量
7503
原文標(biāo)題:聊聊3D激光SLAM開(kāi)源算法-LeGo-LOAM
文章出處:【微信號(hào):3D視覺(jué)工坊,微信公眾號(hào):3D視覺(jué)工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
5 款激光雷達(dá):iDAR、高清3D LiDARInnovizPro、S3、SLAM on Chip、VLS-128
3D激光雷達(dá)SLAM技術(shù)的應(yīng)用趨勢(shì)
測(cè)試的SLAM方案
用于3D激光雷達(dá)SLAM回環(huán)檢測(cè)的實(shí)時(shí)詞袋模型BoW3D
多智能體協(xié)同感知 協(xié)同動(dòng)態(tài)調(diào)度決策的系統(tǒng)

基于LeGo-LOAM框架的激光SLAM技術(shù)解析
詳解激光SLAM框架LeGO-LOAM
3D激光SLAM是用LOAM還是LeGo-LOAM?

基于LeGo-LOAM框架的3D激光SLAM技術(shù)
3D激光SLAM,為什么要選LeGo-LOAM?

不同3D激光SLAM方案對(duì)比分析
對(duì)于3D激光SLAM,LeGo-LOAM到底有多重要?

中強(qiáng)光智能3D激光SLAM無(wú)人叉車(chē)技術(shù)特點(diǎn)詳解
基于深度學(xué)習(xí)的LiDAR SLAM框架(DeepPointMap)

激光雷達(dá)在SLAM算法中的應(yīng)用綜述






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論