
") Protues教程第二講:動(dòng)態(tài)數(shù)碼管
Protues教程第二講:動(dòng)態(tài)數(shù)碼管

視頻教程:https://www.bilibili.com/video/BV1gJ411a7iN
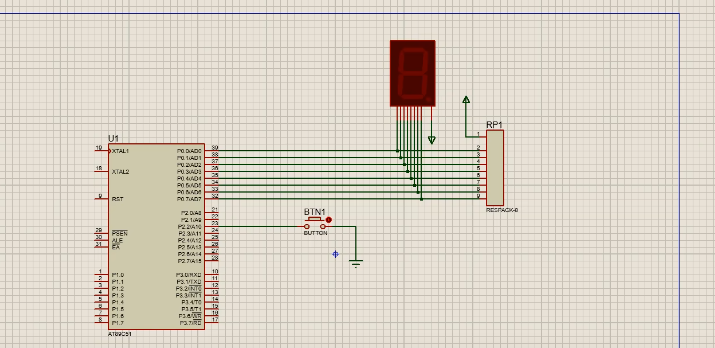
/* 超聲波模塊的TRIG管腳接在單片機(jī)的P20口,ECHO管腳接在單片機(jī)的P21口 其他的電源管腳接在單片機(jī)
開發(fā)板上電源口即可。 */
#include"reg51.h"
#include
#define uchar unsigned char
#define uint unsigned int
#define GPIO_KEY P1
uchar KeyValue; //用來存放讀取到的鍵值
sbit RX=P2^1;
sbit TX=P2^0;
unsigned int time=0;
unsigned int timer=0;
unsigned char posit=0;
unsigned int DIstance;
unsigned long S=0;
bit flag =0;
//--定義使用的IO--//
#define GPIO_DIG P0
sbit BEEP = P2^5;
sbit LSA=P2^2;
sbit LSB=P2^3;
sbit LSC=P2^4;
uchar flag_X;
uchar flag_wei;
uchar flag_buff[3];
unsigned int Set_dis=80;
uchar number;
uchar dat;
//--定義全局變量--//
uchar code smgduan[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};//顯示0~F的值
//0、1、2、3、4、5、6、7、8、9、A、b、C、d、E、F的顯示碼
unsigned char disbuff[4] ={ 0,0,0,0,};
unsigned char timm;
/*******************************************************************************
* 函 數(shù) 名 : delay
* 函數(shù)功能 : 延時(shí)函數(shù),i=1時(shí),大約延時(shí)10us
*******************************************************************************/
void delay(uint i)
{
while(i--);
}
/********************************************************/
void Conut(void)
{
time=TH0*256+TL0;
TH0=0;
TL0=0;
S= (long)(time*0.17); //算出來是CM
DIstance = S;
}
/********************************************************/
void zd0() interrupt 1 //T0中斷用來計(jì)數(shù)器溢出,超過測距范圍
{
flag=1; //中斷溢出標(biāo)志
}
/********************************************************/
void zd3() interrupt 3 //T1中斷用來掃描數(shù)碼管和計(jì)800MS啟動(dòng)模塊
{
TH1=0XFC; //給定時(shí)器賦初值,定時(shí)1ms TH1
TL1=0X18; //TL1
dat++;
if(dat==2)
{
dat = 0;
//GPIO_DIG=0x00;//消隱
switch(number) //位選,選擇點(diǎn)亮的數(shù)碼管,
{
case(0):
LSA=0;LSB=0;LSC=0; GPIO_DIG=smgduan[DIstance%10/1];break;//顯示第0位
case(1):
LSA=1;LSB=0;LSC=0; GPIO_DIG=smgduan[DIstance%100/10];break;//顯示第1位
case(2):
LSA=0;LSB=1;LSC=0; GPIO_DIG=smgduan[DIstance%1000/100];break;//顯示第2位
case(3):
LSA=1;LSB=1;LSC=0; GPIO_DIG=smgduan[DIstance%10000/1000];break;//顯示第3位
case(4):
LSA=0;LSB=0;LSC=1; GPIO_DIG=smgduan[0];break;//顯示第4位
case(5):
LSA=1;LSB=0;LSC=1; GPIO_DIG=smgduan[flag_buff[2]];break;//顯示第5位
case(6):
LSA=0;LSB=1;LSC=1; GPIO_DIG=smgduan[flag_buff[1]];break;//顯示第6位
case(7):
LSA=1;LSB=1;LSC=1; GPIO_DIG=smgduan[flag_buff[0]];break;//顯示第7位
}
number++;
if(number>7)number=0;
}
}
/*********************************************************/
/*******************************************************************************
* 函 數(shù) 名 : KeyDown
* 函數(shù)功能 : 檢測有按鍵按下并讀取鍵值
* 輸 入 : 無
* 輸 出 : 無
*******************************************************************************/
void KeyDown(void)
{
char a=0;
GPIO_KEY=0x0f;
if(GPIO_KEY!=0x0f)//讀取按鍵是否按下
{
delay(1000);//延時(shí)10ms進(jìn)行消抖
if(GPIO_KEY!=0x0f)//再次檢測鍵盤是否按下
{
//測試列
GPIO_KEY=0X0F;
switch(GPIO_KEY)
{
case(0X07): KeyValue=0;break;
case(0X0b): KeyValue=1;break;
case(0X0d): KeyValue=2;break;
case(0X0e): KeyValue=3;break;
}
//測試行
GPIO_KEY=0XF0;
switch(GPIO_KEY)
{
case(0X70): KeyValue=KeyValue;break;
case(0Xb0): KeyValue=KeyValue+4;break;
case(0Xd0): KeyValue=KeyValue+8;break;
case(0Xe0): KeyValue=KeyValue+12;break;
}
while((a
審核編輯:湯梓紅
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報(bào)投訴
-
半導(dǎo)體
+關(guān)注
關(guān)注
335
文章
28967
瀏覽量
238821
-
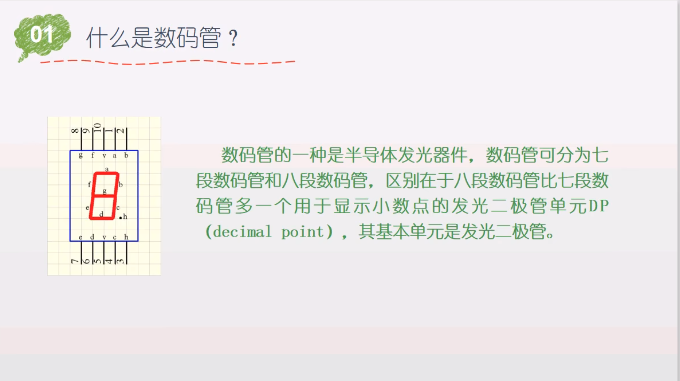
數(shù)碼管
+關(guān)注
關(guān)注
32
文章
1889
瀏覽量
92677
-
Protues
+關(guān)注
關(guān)注
41
文章
184
瀏覽量
72416
-
動(dòng)態(tài)數(shù)碼管
+關(guān)注
關(guān)注
1
文章
11
瀏覽量
7584
發(fā)布評論請先 登錄
相關(guān)推薦
熱點(diǎn)推薦
動(dòng)態(tài)數(shù)碼管顯示原理詳解
動(dòng)態(tài)顯示的特點(diǎn)是將所有數(shù)碼管的段選線并聯(lián)在一起,由位選線控制是哪一位數(shù)碼管有效。選亮數(shù)碼管采用動(dòng)態(tài)掃描顯示。所謂
![的頭像]() 發(fā)表于 11-10 11:38
?5753次閱讀
發(fā)表于 11-10 11:38
?5753次閱讀
數(shù)碼管動(dòng)態(tài)顯示
數(shù)碼管動(dòng)態(tài)顯示,要讓數(shù)碼管顯示0到7這8個(gè)數(shù)字,如上所示為主函數(shù)代碼。我的問題是為什么要加上P0=0xff這行代碼?按照動(dòng)態(tài)顯示的原理,剛開始選中數(shù)
發(fā)表于 08-27 15:33
關(guān)于數(shù)碼管的protues問題
我是新人,學(xué)protues也沒有幾天,所以問的題目希望大神么不要見笑,還望多多指導(dǎo)為什么我畫的這個(gè)數(shù)碼管的仿真數(shù)碼管根本點(diǎn)不亮換了很多的數(shù)碼管共陰共陽都試過了就是點(diǎn)不亮,是電路圖的問題
發(fā)表于 07-04 22:10
LED數(shù)碼管循環(huán)移位顯示如何去完成呢
單片機(jī)系統(tǒng)基礎(chǔ)實(shí)驗(yàn)——LED數(shù)碼管循環(huán)移位顯示第一部分 前言第二部分 數(shù)碼管的原理構(gòu)成LED數(shù)碼管的結(jié)構(gòu)LED數(shù)碼管的工作原理LED
發(fā)表于 11-18 06:38
數(shù)碼管的動(dòng)態(tài)顯示原理是什么
數(shù)碼管的動(dòng)態(tài)顯示原理第一個(gè)數(shù)碼管顯示0,1s后第二個(gè)數(shù)碼管顯示1,直到第六個(gè)數(shù)碼管顯示5后又重新開始#include #define uin
發(fā)表于 12-08 06:03
動(dòng)態(tài)數(shù)碼管與靜態(tài)數(shù)碼管介紹
數(shù)字就根據(jù)圖中a-g發(fā)光二極管的亮來調(diào)節(jié);比如要1亮,那就b、c二極管發(fā)光,也就是1100 0000,轉(zhuǎn)為16進(jìn)制就是P0=0xf92.數(shù)碼管靜態(tài)顯示原理靜態(tài)顯示:必須選擇一個(gè)8位數(shù)據(jù)線來保持顯示的字碼形;輸入的字碼會(huì)一直保持到
發(fā)表于 01-24 06:32
數(shù)碼管動(dòng)態(tài)掃描電路
數(shù)碼管動(dòng)態(tài)掃描電路
在ME500B、ME300B開發(fā)系統(tǒng)中,均采用了8位數(shù)碼管動(dòng)態(tài)掃描顯
發(fā)表于 05-22 09:29
?7431次閱讀
動(dòng)態(tài)數(shù)碼管顯示技術(shù)
動(dòng)態(tài)數(shù)碼管顯示技術(shù)
1. 實(shí)驗(yàn)任務(wù)
如圖4.13.1所示,P0端口接動(dòng)態(tài)數(shù)碼管的字形碼筆段,P2端口接動(dòng)態(tài)數(shù)
發(fā)表于 11-06 13:48
?1153次閱讀
數(shù)碼管(動(dòng)態(tài)顯示)【C語言版】
數(shù)碼管(動(dòng)態(tài)顯示)【C語言版】數(shù)碼管(動(dòng)態(tài)顯示)【C語言版】數(shù)碼管(動(dòng)態(tài)顯示)【C語言版】
發(fā)表于 12-29 15:51
?0次下載
動(dòng)態(tài)數(shù)碼管顯示程序
動(dòng)態(tài)數(shù)碼管顯示程序,動(dòng)態(tài)數(shù)碼管顯示程序,動(dòng)態(tài)數(shù)碼管顯示程序,
發(fā)表于 01-12 14:55
?60次下載
MIN數(shù)碼管動(dòng)態(tài)顯示
數(shù)碼管動(dòng)態(tài)顯示,MIN數(shù)碼管動(dòng)態(tài)顯示,MIN。
發(fā)表于 05-03 10:48
?11次下載
動(dòng)態(tài)數(shù)碼管
動(dòng)態(tài)數(shù)碼管 基于51單片機(jī)的動(dòng)態(tài)數(shù)碼管源代碼。
發(fā)表于 05-09 09:41
?9次下載
數(shù)碼管動(dòng)態(tài)顯示的原理概述
動(dòng)態(tài)顯示的特點(diǎn)是將所有數(shù)碼管的段選線并聯(lián)在一起,由位選線控制是哪一位數(shù)碼管有效。選亮數(shù)碼管采用動(dòng)態(tài)掃描顯示。所謂
發(fā)表于 11-04 08:00
?0次下載
基于單片機(jī)的LED數(shù)碼管循環(huán)移位顯示
單片機(jī)系統(tǒng)基礎(chǔ)實(shí)驗(yàn)——LED數(shù)碼管循環(huán)移位顯示第一部分 前言第二部分 數(shù)碼管的原理構(gòu)成LED數(shù)碼管的結(jié)構(gòu)LED數(shù)碼管的工作原理LED
發(fā)表于 11-11 15:06
?16次下載

靜態(tài)數(shù)碼管和動(dòng)態(tài)數(shù)碼管
目錄一,什么是數(shù)碼管二,靜態(tài)數(shù)碼管的驅(qū)動(dòng)三,動(dòng)態(tài)數(shù)碼管四,動(dòng)態(tài)
發(fā)表于 01-12 18:31
?40次下載





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論