
 proteus:教室自動感應照明控制系統
proteus:教室自動感應照明控制系統

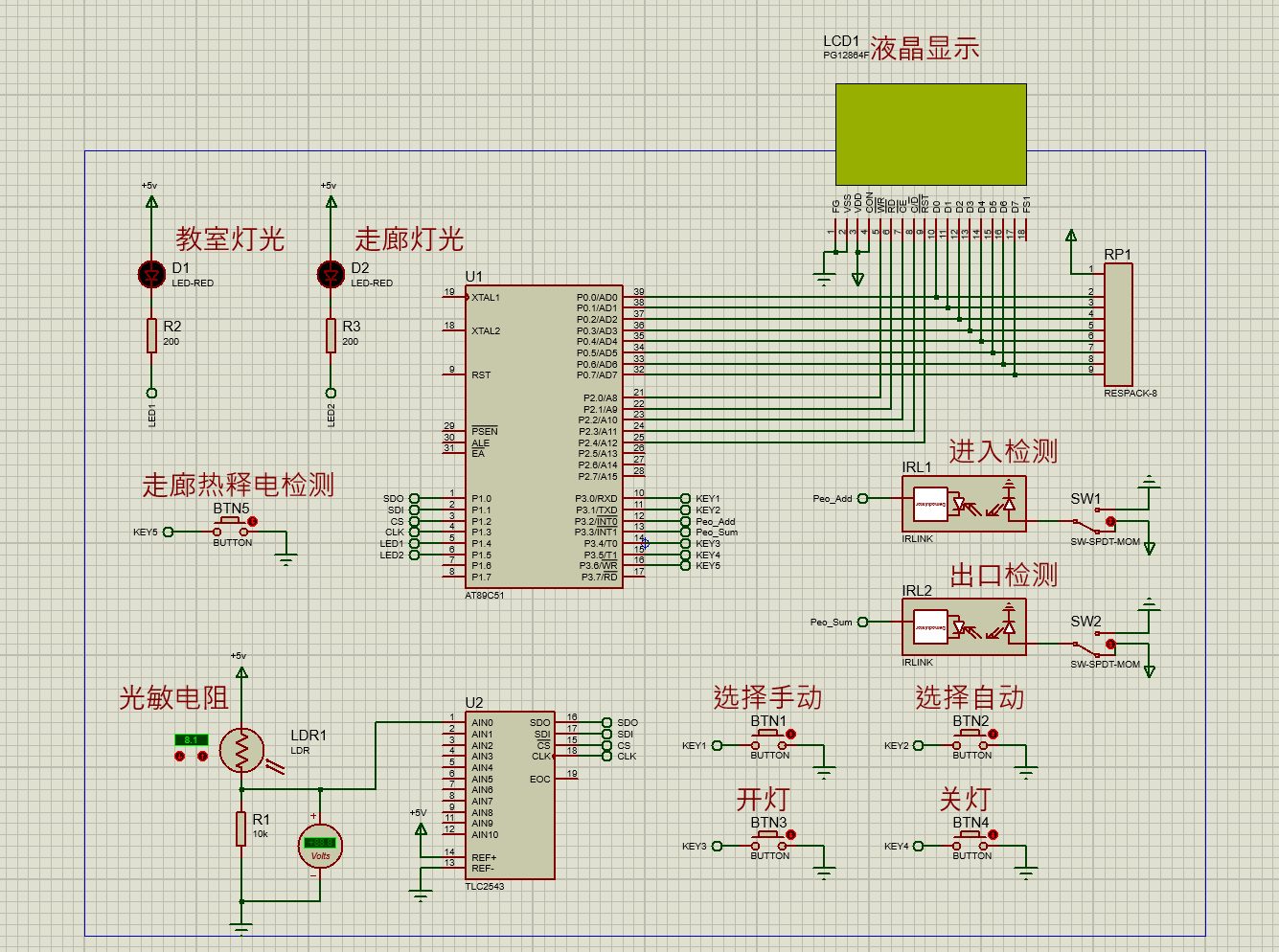
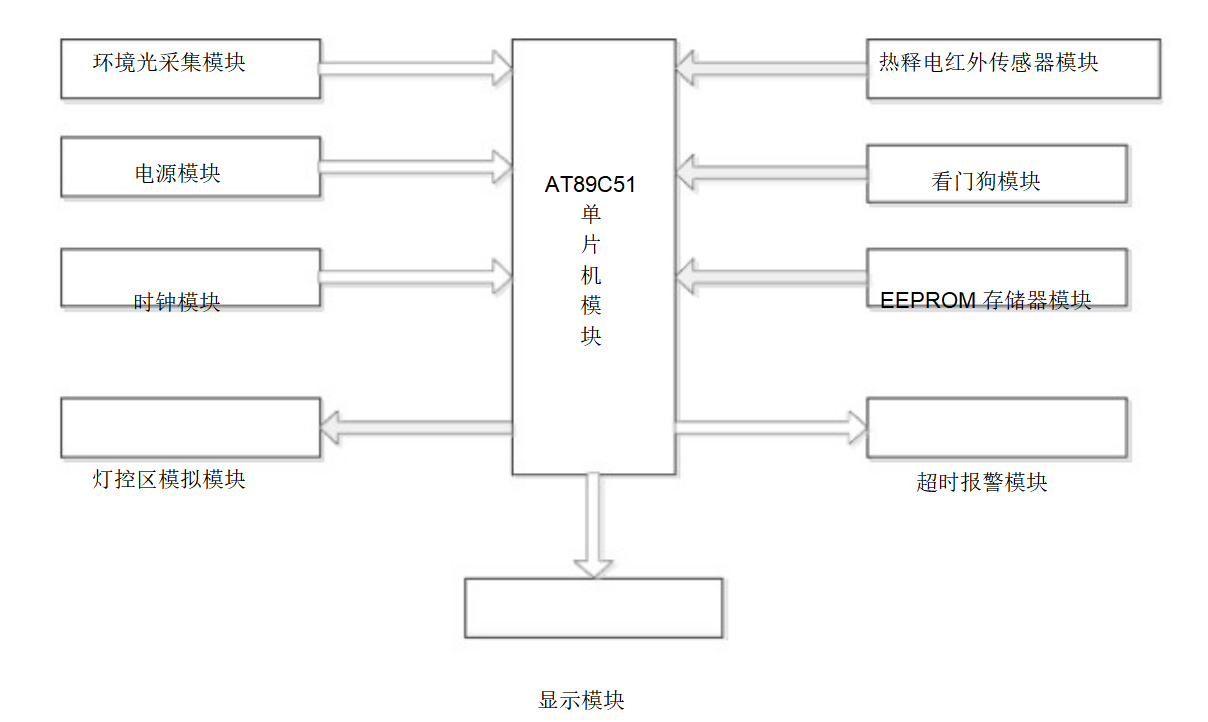
教室自動感應照明控制系統是基于單片機對學校教室照明設備進行控制和管理,教室亮度的調節、自動與手動狀態的切換。整個系統由紅外對管電路、光線檢測電路、獨立按鍵操作電路組成。單片機可以實現對教室內的教室檢測控制元件所采集到的信息的接收、處理,從而可以很輕松的通過自習學生人數對教室光照強度進行實時調節。
教室照明節電控制部分采用STC89C52單片機作為核心控制芯片。教室入口裝有兩個激光傳感器通過高低電平判斷人數輸出信號。樓道和洗手間采用熱釋電傳感器觸發電路使LED燈發亮。
系統實現的主要功能有:
1)紅外對管電路,也是人數檢測電路,可以對進入教室的人數進行統計,然后在光線黑暗的條件下,根據教室的人數決定照明燈的亮度。
2)光敏電阻檢測光線強度,對照明現場的亮度進行檢測,如果現場亮度符合照明要求,系統應關閉照明設備實現智能控制。
3)獨立按鍵操作電路,可以切換自動狀態和手動狀態。手動狀態就是可以手動控制教室的照明燈。
4)樓道部分采用熱釋電傳感器檢測該區域是否有人通過,控制LED燈的開關。
#include "reg52.h"
#define uchar unsigned char
#define uint unsigned int
typedef unsigned int u16; //對數據類型進行聲明定義
typedef unsigned char u8;
#define ulong unsigned long
ulong volt;//測量的電壓值
sbit wr=P2^0; //數據寫
sbit rd=P2^1; //數據讀
sbit ce=P2^2; //片選
sbit cd=P2^3; //指令數據通道,1指令,0數據
sbit rst=P2^4; //復位信號
sbit CLK=P1^3;//定義時鐘信號口
sbit DIN=P1^1;//定義2543數據寫入口
sbit DOUT=P1^0;//定義2543數據讀取口
sbit CS=P1^2;//定義2543片選信號口
sbit LED1 = P1^4; //教室燈光
sbit LED2 = P1^5; //走廊燈光
sbit KEY1 = P3^0;
sbit KEY2 = P3^1;
sbit KEY3 = P3^4;
sbit KEY4 = P3^5;
sbit KEY5 = P3^6;
uchar Peo_Number;
uint LDR_value;
uchar Mode = 0; //當前控制模式 0 為 自動 1 為手動
uchar flag; //當前黑暗程度 0 為 明亮 1 為黑暗
uchar PWM_SET = 0;
uchar PWM_Value;
uchar LED_flag; //走廊燈
uchar code HZ0[][32]={
{0x08,0x20,0x08,0x20,0x7E,0xA0,0x09,0x3E,0x0A,0x44,0xFF,0x44,0x08,0x44,0x7E,0xA4,
0x24,0x28,0x48,0x28,0x8F,0x10,0x78,0x10,0x08,0x28,0x08,0x48,0x28,0x84,0x11,0x02},/*"教",0*/
{0x02,0x00,0x01,0x00,0x7F,0xFE,0x40,0x02,0x80,0x04,0x3F,0xF8,0x04,0x00,0x08,0x20,
0x1F,0xF0,0x01,0x10,0x01,0x00,0x3F,0xF8,0x01,0x00,0x01,0x00,0xFF,0xFE,0x00,0x00},/*"室",1*/
{0x00,0x00,0x7D,0xFC,0x44,0x44,0x44,0x44,0x44,0x44,0x44,0x94,0x7D,0x08,0x44,0xFC,
0x44,0x84,0x44,0x84,0x44,0x84,0x7C,0xFC,0x00,0x00,0x48,0x88,0x44,0x44,0x84,0x44},/*"照",2*/
{0x00,0x00,0x00,0xFC,0x7C,0x84,0x44,0x84,0x44,0x84,0x44,0xFC,0x7C,0x84,0x44,0x84,
0x44,0x84,0x44,0xFC,0x7C,0x84,0x44,0x84,0x01,0x04,0x01,0x04,0x02,0x14,0x04,0x08},/*"明",3*/
{0x00,0xF8,0x3F,0x00,0x04,0x00,0x08,0x20,0x10,0x40,0x3F,0x80,0x01,0x00,0x06,0x10,
0x18,0x08,0x7F,0xFC,0x01,0x04,0x09,0x20,0x11,0x10,0x21,0x08,0x45,0x04,0x02,0x00},/*"系",4*/
{0x10,0x40,0x10,0x20,0x20,0x20,0x23,0xFE,0x48,0x40,0xF8,0x88,0x11,0x04,0x23,0xFE,
0x40,0x92,0xF8,0x90,0x40,0x90,0x00,0x90,0x19,0x12,0xE1,0x12,0x42,0x0E,0x04,0x00},/*"統",5*/
{0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x02,0x80,0x02,0x80,
0x04,0x40,0x04,0x40,0x08,0x20,0x08,0x20,0x10,0x10,0x20,0x08,0x40,0x04,0x80,0x02},/*"人",6*/
{0x08,0x20,0x49,0x20,0x2A,0x20,0x08,0x3E,0xFF,0x44,0x2A,0x44,0x49,0x44,0x88,0xA4,
0x10,0x28,0xFE,0x28,0x22,0x10,0x42,0x10,0x64,0x28,0x18,0x28,0x34,0x44,0xC2,0x82},/*"數",7*/
{0x01,0x00,0x02,0x00,0x04,0x00,0x1F,0xF0,0x10,0x10,0x10,0x10,0x10,0x10,0x1F,0xF0,
0x10,0x10,0x10,0x10,0x1F,0xF0,0x10,0x10,0x10,0x10,0x10,0x10,0x1F,0xF0,0x10,0x10},/*"自",8*/
{0x00,0x40,0x00,0x40,0x7C,0x40,0x00,0x40,0x01,0xFC,0x00,0x44,0xFE,0x44,0x20,0x44,
0x20,0x44,0x20,0x84,0x48,0x84,0x44,0x84,0xFD,0x04,0x45,0x04,0x02,0x28,0x04,0x10},/*"動",9*/
{0x00,0x10,0x00,0xF8,0x3F,0x00,0x01,0x00,0x01,0x00,0x3F,0xF8,0x01,0x00,0x01,0x00,
0x01,0x00,0xFF,0xFE,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x05,0x00,0x02,0x00},/*"手",10*/
{0x00,0x40,0x00,0x40,0x7C,0x40,0x00,0x40,0x01,0xFC,0x00,0x44,0xFE,0x44,0x20,0x44,
0x20,0x44,0x20,0x84,0x48,0x84,0x44,0x84,0xFD,0x04,0x45,0x04,0x02,0x28,0x04,0x10},/*"動",11*/
{0x11,0x10,0x11,0x10,0x17,0xFC,0x11,0x10,0xFC,0x00,0x13,0xF8,0x32,0x08,0x3B,0xF8,
0x56,0x08,0x53,0xF8,0x90,0x40,0x17,0xFC,0x10,0xA0,0x11,0x10,0x12,0x08,0x14,0x06},/*"模",12*/
{0x00,0x48,0x00,0x44,0x00,0x44,0x00,0x40,0xFF,0xFE,0x00,0x40,0x00,0x40,0x3E,0x40,
0x08,0x40,0x08,0x40,0x08,0x20,0x08,0x22,0x0F,0x12,0x78,0x0A,0x20,0x06,0x00,0x02},/*"式",13*/
{0x01,0x00,0x21,0x08,0x11,0x08,0x09,0x10,0x09,0x20,0x01,0x00,0xFF,0xFE,0x04,0x40,
0x04,0x40,0x04,0x40,0x04,0x40,0x08,0x42,0x08,0x42,0x10,0x42,0x20,0x3E,0xC0,0x00},/*"光",14*/
{0x40,0x20,0x40,0x20,0x7F,0x20,0x80,0x3E,0x7E,0x44,0x42,0x44,0x52,0x44,0x4A,0xA4,
0xFF,0xA8,0x42,0x28,0x92,0x10,0x8A,0x10,0xFF,0x28,0x02,0x48,0x14,0x84,0x09,0x02},/*"敏",15*/
{0x00,0x00,0x7D,0xF8,0x45,0x08,0x49,0x08,0x49,0x08,0x51,0xF8,0x49,0x08,0x49,0x08,
0x45,0x08,0x45,0xF8,0x45,0x08,0x69,0x08,0x51,0x08,0x41,0x08,0x47,0xFE,0x40,0x00},/*"阻",16*/
{0x08,0x40,0x08,0x40,0x0F,0xFC,0x10,0x40,0x10,0x40,0x33,0xF8,0x32,0x08,0x53,0xF8,
0x92,0x08,0x13,0xF8,0x12,0x08,0x13,0xF8,0x12,0x08,0x12,0x08,0x1F,0xFE,0x10,0x00},/*"值",17*/
};
uchar code SZ[][16]={
{0x00,0x00,0x00,0x18,0x24,0x42,0x42,0x42,0x42,0x42,0x42,0x42,0x24,0x18,0x00,0x00},/*"0",0*/
{0x00,0x00,0x00,0x08,0x38,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x3E,0x00,0x00},/*"1",1*/
{0x00,0x00,0x00,0x3C,0x42,0x42,0x42,0x02,0x04,0x08,0x10,0x20,0x42,0x7E,0x00,0x00},/*"2",2*/
{0x00,0x00,0x00,0x3C,0x42,0x42,0x02,0x04,0x18,0x04,0x02,0x42,0x42,0x3C,0x00,0x00},/*"3",3*/
{0x00,0x00,0x00,0x04,0x0C,0x0C,0x14,0x24,0x24,0x44,0x7F,0x04,0x04,0x1F,0x00,0x00},/*"4",4*/
{0x00,0x00,0x00,0x7E,0x40,0x40,0x40,0x78,0x44,0x02,0x02,0x42,0x44,0x38,0x00,0x00},/*"5",5*/
{0x00,0x00,0x00,0x18,0x24,0x40,0x40,0x5C,0x62,0x42,0x42,0x42,0x22,0x1C,0x00,0x00},/*"6",6*/
{0x00,0x00,0x00,0x7E,0x42,0x04,0x04,0x08,0x08,0x10,0x10,0x10,0x10,0x10,0x00,0x00},/*"7",7*/
{0x00,0x00,0x00,0x3C,0x42,0x42,0x42,0x24,0x18,0x24,0x42,0x42,0x42,0x3C,0x00,0x00},/*"8",8*/
{0x00,0x00,0x00,0x38,0x44,0x42,0x42,0x42,0x46,0x3A,0x02,0x02,0x24,0x18,0x00,0x00},/*"9",9*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*" ",10*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x18,0x18,0x00,0x00,0x00,0x00,0x18,0x18,0x00,0x00},/*":",11*/
};
void delay(uint j) //1ms
{
uchar i=250;
for(;j>0;j--)
{
while(--i);
i=249;
while(--i);
i=250;
}
}
void Delay_xms(uint x)
{
uint i,j;
for(i=0;i>=1;
volt=ad;//取走轉換結果
volt=volt*1221;//例子的滿量程為5V,轉換分辯率為12位(2的12次方=4096) 。即最大值是255,5/4096=1221mV,即例子中的1V代表實際1221mV
LDR_value = volt / 1000;
}
void KEY_Scan()
{
if(KEY1 == 0)
{
delay(20);
if(KEY1 == 0)
{
while(KEY1==0);
display_HZ(1,0,HZ0[10]);
display_HZ(1,1,HZ0[11]);
display_HZ(1,2,HZ0[12]);
display_HZ(1,3,HZ0[13]);
Mode = 1;
}
}
if(KEY2 == 0)
{
delay(20);
if(KEY2 == 0)
{
while(KEY2==0);
display_HZ(1,0,HZ0[8]);
display_HZ(1,1,HZ0[9]);
display_HZ(1,2,HZ0[12]);
display_HZ(1,3,HZ0[13]);
Mode = 0;
}
}
if(KEY3 == 0)
{
delay(20);
if(KEY3 == 0)
{
while(KEY3==0);
if(Mode==1)
{
LED1 = 0;
}
}
}
if(KEY4 == 0)
{
delay(20);
if(KEY4 == 0)
{
while(KEY4==0);
if(Mode==1)
{
LED1 = 1;
}
}
}
if(KEY5 == 0)
{
delay(20);
if(KEY5 == 0)
{
while(KEY5==0);
LED2 = 0;
delay(1000);
LED2 = 1;
}
}
}
void main()
{
TMOD |= 0x01; //開啟定時器0 0x10時使用定時器1 0x11時啟動兩個
TH0=0XFC; //給定時器賦初值,定時1ms TH1
TL0=0X18; //TL1
ET0=1; //定時器0中斷打開 ET1
TR0=1; //定時器0開關打開 TR1
EA=1; //全局中斷開
EX0=1; //外部中斷0開() EX1 為外部中斷1 (P3^3)
IT0=1; //低電平觸發 IT1為中斷1
EX1=1; //外部中斷0開() EX1 為外部中斷1 (P3^3)
IT1=1; //低電平觸發 IT1為中斷1
init();
Delay_xms(10);
display_HZ(0,1,HZ0[0]);
display_HZ(0,2,HZ0[1]);
display_HZ(0,3,HZ0[2]);
display_HZ(0,4,HZ0[3]);
display_HZ(0,5,HZ0[4]);
display_HZ(0,6,HZ0[5]);
display_HZ(1,0,HZ0[8]);
display_HZ(1,1,HZ0[9]);
display_HZ(1,2,HZ0[12]);
display_HZ(1,3,HZ0[13]);
display_HZ(2,0,HZ0[6]);
display_HZ(2,1,HZ0[7]);
display_SZ(2,4,SZ[11]);
display_SZ(2,5,SZ[Peo_Number/100]);
display_SZ(2,6,SZ[Peo_Number/10%10]);
display_SZ(2,7,SZ[Peo_Number%10]);
read2543(0);
display_HZ(3,0,HZ0[14]);
display_HZ(3,1,HZ0[15]);
display_HZ(3,2,HZ0[16]);
display_HZ(3,3,HZ0[17]);
display_SZ(3,8,SZ[11]);
display_SZ(3,9,SZ[LDR_value/1000]);
display_SZ(3,10,SZ[LDR_value/100%10]);
display_SZ(3,11,SZ[LDR_value/10%10]);
display_SZ(3,12,SZ[LDR_value%10]);
while(1)
{
KEY_Scan();
}
}
void K_INT1( ) interrupt 0 // 這里0對應下表
{
Peo_Number++;
}
void K_INT2( ) interrupt 2 // 這里0對應下表
{
if(Peo_Number!=0)
{
Peo_Number--;
}
}
void Timer0() interrupt 1 //參考上圖 定時器1時為3
{
static uint i; //定義一個自變形變量
TH0=0XFC; //給定時器賦初值,定時1ms TH1
TL0=0X18; //TL1
i++;
PWM_Value++;
if(i==200)
{
i=0;
read2543(0);
display_SZ(3,9,SZ[LDR_value/1000]);
display_SZ(3,10,SZ[LDR_value/100%10]);
display_SZ(3,11,SZ[LDR_value/10%10]);
display_SZ(3,12,SZ[LDR_value%10]);
display_SZ(2,5,SZ[Peo_Number/100]);
display_SZ(2,6,SZ[Peo_Number/10%10]);
display_SZ(2,7,SZ[Peo_Number%10]);
if(Peo_Number == 1)
{
PWM_SET = 1;
}else if(Peo_Number > 20)
{
PWM_SET = 5;
}else if(Peo_Number < 20 && Peo_Number?>1)
{
PWM_SET = Peo_Number/5 + 1;//234
}else if(Peo_Number==0)
{
PWM_SET = 0;
}
if(LDR_value= PWM_SET)//1
{
LED1 = 1;
}else
{
LED1 = 0;
}
}else if(flag == 0 && Mode == 0)
{
LED1 = 1;
}
}
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2567文章
53252瀏覽量
769817 -
控制系統
+關注
關注
41文章
6807瀏覽量
112397 -
Proteus
+關注
關注
79文章
1692瀏覽量
108895
發布評論請先 登錄
相關推薦
熱點推薦
基于PLCBUS協議教室照明智能控制系統設計方案
介紹PLCBUS 電力線通訊協議,利用PLCBUS-9402393 模塊結合教室實際照明電路設計教室智能照明控制系統,給出了智能
自動感應皂液器方案
疫情帶火了這么一款產品,自動感應伸手出泡沫,收手即可關閉。全自動智能紅外感應是它的最大特點所在。這就是當前市場上正備受消費者青睞的一款自動感應皂液器,紅外
發表于 06-16 22:33
34-基于51單片機的教室智能照明控制系統設計 精選資料分享
用51單片機STC89C52、時鐘芯片DS1302、液晶屏LCD1602、光敏電阻、紅外對管,設計一個教室智能照明控制系統。
發表于 07-19 06:30
使用AT89S51單片機設計教室燈光自動控制系統的詳細資料說明
單片機為控制核心,采用光敏三極管作為探頭對環境光線強度進行檢測,采用熱釋電紅外傳感器檢測教室有無人進出; 根據此控制系統對環境光信號和人體存在信號的智能判斷,以及對教室合理開燈的條件
發表于 03-18 08:00
?19次下載
自動感應門
感應自動門是指當人或物體靠近門,通過門信號,觸發自動門控制器實現門自動開啟和關閉[A1][D2],從理論上理解應該是門的概念的延伸,是門的功能根據人的需要所進行的發展和完善。
發表于 04-03 14:28
?2002次閱讀

淺析教室智能照明控制系統的設計
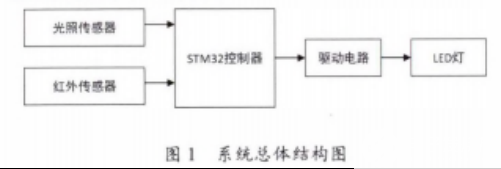
安科瑞 于洋 ? 摘要 :針對室內不同區域對于光照強度的不同要求,設計了一個利用STM32作為控制器的教室智能照明控制系統,能夠依據室內照明
發表于 12-11 15:42
?2333次閱讀
教室智能照明控制系統的設計說明
摘要:針對室內不同區域對于光照強度的不同要求,設計了一個利用STM32作為控制器的教室智能照明控制系統,能夠依據室內照明強度以及室內人員分布
發表于 12-14 14:13
?5279次閱讀





 工商網監
工商網監

評論