

導(dǎo)讀:本期文章主要介紹的是基于離散域下設(shè)計(jì)PI電流調(diào)節(jié)器,之后與傳統(tǒng)的d、q軸的電流環(huán)的性能做仿真對(duì)比分析。
一、引言
在異步電機(jī)矢量控制系統(tǒng)中,普遍采用在連續(xù)時(shí)間域內(nèi)分析并隨后離散化的方法進(jìn)行電流調(diào)節(jié)器的設(shè)計(jì),而當(dāng)系統(tǒng)運(yùn)行在高速條件下,受電機(jī)  軸耦合以及數(shù)字系統(tǒng)控制延遲的影響,將導(dǎo)致系統(tǒng)性能下降。基于電機(jī)離散化模型,對(duì)使用不同電流調(diào)節(jié)器的系統(tǒng)特性進(jìn)行了對(duì)比和分析,并通過(guò)直接離散的復(fù)矢量電流調(diào)節(jié)器設(shè)計(jì)方法,使電流環(huán)不受電機(jī)轉(zhuǎn)速影響,保證了系統(tǒng)在寬速度范圍內(nèi)運(yùn)行的良好性能。
軸耦合以及數(shù)字系統(tǒng)控制延遲的影響,將導(dǎo)致系統(tǒng)性能下降。基于電機(jī)離散化模型,對(duì)使用不同電流調(diào)節(jié)器的系統(tǒng)特性進(jìn)行了對(duì)比和分析,并通過(guò)直接離散的復(fù)矢量電流調(diào)節(jié)器設(shè)計(jì)方法,使電流環(huán)不受電機(jī)轉(zhuǎn)速影響,保證了系統(tǒng)在寬速度范圍內(nèi)運(yùn)行的良好性能。
二、離散域下PI電流調(diào)節(jié)器的實(shí)現(xiàn)
離散域下的PI電流調(diào)節(jié)器的實(shí)現(xiàn),可分為以下幾個(gè)步驟:
1、對(duì)異步電機(jī)進(jìn)行離散化;
在靜止坐標(biāo)系中感應(yīng)電機(jī)的數(shù)學(xué)模型可以等效成簡(jiǎn)單的 負(fù)載,表示如下:
負(fù)載,表示如下:
為了在離散域內(nèi)對(duì)電流調(diào)節(jié)器的設(shè)計(jì)和性能進(jìn)行分析,對(duì)感應(yīng)電機(jī)在離散域內(nèi)的建模至關(guān)重要。將上式所示的物理系統(tǒng)轉(zhuǎn)換到離散域內(nèi)的通常做法是將逆變器作為一個(gè)理想的零階保持器,則在靜止坐標(biāo)系中感應(yīng)電機(jī)模型在離散域內(nèi)的表示為:

進(jìn)行離散化處理后,得到:
將上式轉(zhuǎn)換成同步旋轉(zhuǎn)坐標(biāo)系下的差分方程,然后得到旋轉(zhuǎn)坐標(biāo)系中的感應(yīng)電機(jī)數(shù)學(xué)模型在離散域中的傳遞函數(shù)為:

2、根據(jù)離散化的異步電機(jī)模型,基于零極點(diǎn)對(duì)消的設(shè)計(jì)方法,直接設(shè)計(jì)含有可調(diào)參數(shù)的同步旋轉(zhuǎn)坐標(biāo)系下的離散域調(diào)節(jié)器;
引入直接離散的復(fù)矢量電流調(diào)節(jié)器,通過(guò)在離散域內(nèi)直接對(duì)電流調(diào)節(jié)器進(jìn)行設(shè)計(jì),使離散電流調(diào)節(jié)器的零點(diǎn)與離散的電機(jī)模型的極點(diǎn)對(duì)消,避免了由離散化導(dǎo)致電流調(diào)節(jié)器性能的偏差。

3、可調(diào)參數(shù)K的分析計(jì)算;
4、最終離散域下電流調(diào)節(jié)器表達(dá)式的確定X;
5、根據(jù) ,進(jìn)行Z的反變換,求得
,進(jìn)行Z的反變換,求得 的差分方程,進(jìn)而求得。
的差分方程,進(jìn)而求得。
三、仿真對(duì)比分析
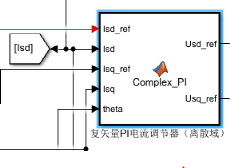
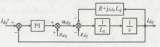
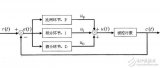
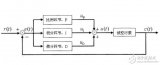
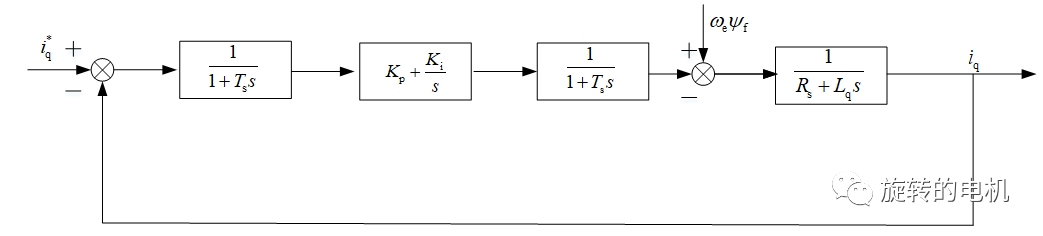
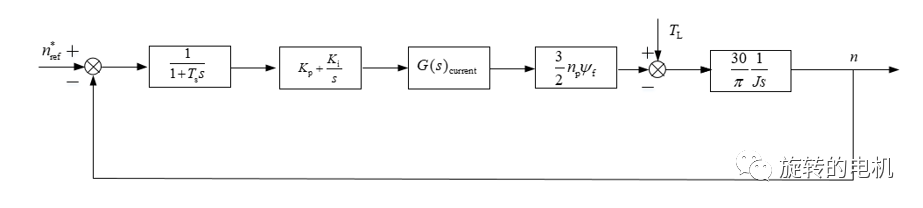
圖3-1 離散域下PI電流調(diào)節(jié)器的實(shí)現(xiàn)
(a)傳統(tǒng)PI電流調(diào)節(jié)器
(b)離散域下設(shè)計(jì)的復(fù)矢量PI電流調(diào)節(jié)器
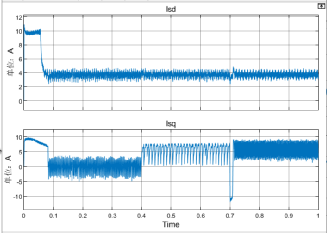
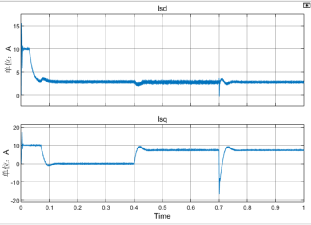
圖3-2 采樣率為5KHz時(shí)d、q軸電流變化情況
(a)傳統(tǒng)PI電流調(diào)節(jié)器
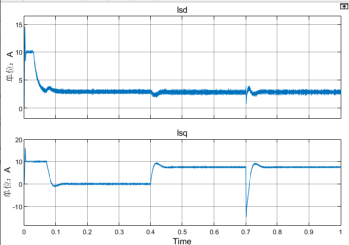
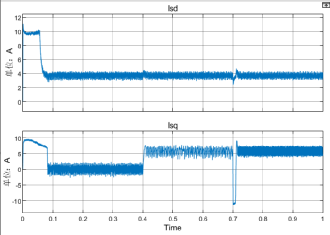
(b)離散域下設(shè)計(jì)的復(fù)矢量PI電流調(diào)節(jié)器 圖3-2 采樣率為10KHz時(shí)d、q軸電流變化情況
傳統(tǒng)的PI電流調(diào)節(jié)器因?yàn)閐、q、軸分離,所以有兩個(gè)PI電流調(diào)節(jié)器獨(dú)立控制d、q、軸電流。d、q軸并未完全解耦,且耦合項(xiàng)與 成正比,并且調(diào)節(jié)器還需要進(jìn)行離散才能實(shí)現(xiàn),這不可避免的就會(huì)引入離散誤差。圖3-2中的圖(a)是傳統(tǒng)PI調(diào)節(jié)器的d、q軸電流的變化情況,可以發(fā)現(xiàn)d、q軸的電流在采樣率為5KHz、10KHz時(shí)紋波很大,基于離散域下設(shè)計(jì)的PI調(diào)節(jié)器下的d、q軸電流的紋波非常小。
成正比,并且調(diào)節(jié)器還需要進(jìn)行離散才能實(shí)現(xiàn),這不可避免的就會(huì)引入離散誤差。圖3-2中的圖(a)是傳統(tǒng)PI調(diào)節(jié)器的d、q軸電流的變化情況,可以發(fā)現(xiàn)d、q軸的電流在采樣率為5KHz、10KHz時(shí)紋波很大,基于離散域下設(shè)計(jì)的PI調(diào)節(jié)器下的d、q軸電流的紋波非常小。
四、總結(jié)
本文給出了直接離散的復(fù)矢量電流調(diào)節(jié)器的設(shè)計(jì)方法,通過(guò)在離散域內(nèi)直接使電流調(diào)節(jié)器的零點(diǎn)與電機(jī)模型極點(diǎn)對(duì)消,保證了系統(tǒng)性能不受轉(zhuǎn)速影響。仿真結(jié)果表明采用這種電流調(diào)節(jié)器設(shè)計(jì)方法能夠在寬速度范圍內(nèi)獲得良好的性能。
審核編輯:湯梓紅
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6753瀏覽量
111801 -
仿真
+關(guān)注
關(guān)注
51文章
4236瀏覽量
135305 -
異步電機(jī)
+關(guān)注
關(guān)注
6文章
428瀏覽量
33258 -
調(diào)節(jié)器
+關(guān)注
關(guān)注
5文章
874瀏覽量
47336
原文標(biāo)題:離散域下PI調(diào)節(jié)器設(shè)計(jì)學(xué)習(xí)與實(shí)現(xiàn)
文章出處:【微信號(hào):淺談電機(jī)控制,微信公眾號(hào):淺談電機(jī)控制】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
PI電流調(diào)節(jié)器的工作原理和種類
基于離散域下設(shè)計(jì)的PI電流調(diào)節(jié)器

離散域下內(nèi)置式永磁同步電機(jī)復(fù)矢量電流調(diào)節(jié)器設(shè)計(jì)
在離散域中怎樣去設(shè)計(jì)一種電流調(diào)節(jié)器
pi調(diào)節(jié)器原理_pi調(diào)節(jié)器電路圖_pi調(diào)節(jié)器參數(shù)作用
pi調(diào)節(jié)器的輸入和輸出_pi調(diào)節(jié)器的傳遞函數(shù)
PI調(diào)節(jié)器介紹及設(shè)計(jì)
PI調(diào)節(jié)器的概念及設(shè)計(jì)
永磁同步電機(jī)磁場(chǎng)定向控制電流環(huán)PI調(diào)節(jié)器的參數(shù)整定
永磁同步電機(jī)磁場(chǎng)定向控制轉(zhuǎn)速環(huán)PI調(diào)節(jié)器的參數(shù)整定
串聯(lián)型PI和并聯(lián)型PI調(diào)節(jié)器的比較





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論