 有源鉗位反激(ACF)變換器控制方案(4)
有源鉗位反激(ACF)變換器控制方案(4)
如前幾期內容所述,ACF要實現高效率就必須滿足功率管ZVS的需求。要實現ZVS就需要采用合適的控制方案。前幾期中的控制策略在實現ZVS方面基本都是直接或間接的調節鉗位管的導通時間,增大谷值電流,從而實現主功率管ZVS。這期內容中所采用的動態諧振周期控制(dynamic resonant periodcontrol, DRPC)策略也是通過調節鉗位管的導通時間而調節谷值電流實現的,但是不同的是,該控制策略讓ACF工作在非互補模式,從而降低鉗位管的導通損耗,實現效率的更優化。該控制方法由臺灣交通大學提出,所采用控制框圖如圖1所示,具體的控制模式簡述如下。
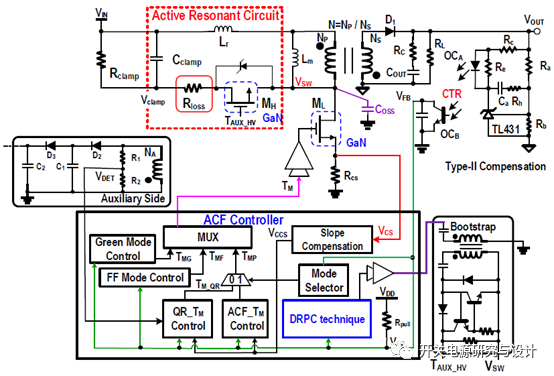
圖1 DRPC控制框圖
1. 重載下的DPRC模式
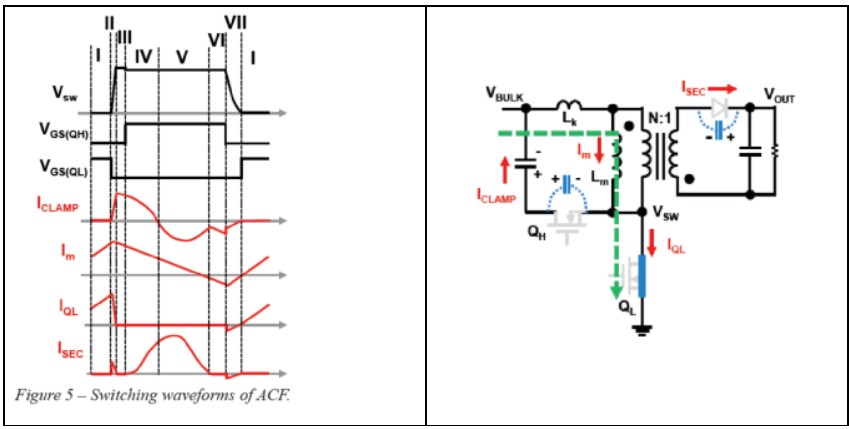
該模式下,ACF的柵驅動信號非互補導通輸出,見圖2所示。其中Tm為主功率管ML工作波形,Taux為鉗位管MH工作波形。Taux只在Tm為0的第③區域為高電平,這樣的好處在于可以盡可能的降低諧振電流的有效值,從而產生較小的鉗位管導通損耗。通過調節Taux的時間長度,可以調節谷值電流的大小。只要Taux的時間調節足夠精確,就可以使ACF在全輸入電壓范圍下都能夠恰好實現ZVS。這樣,通過這種控制方式,即降低了死區損耗的大小,也降低了鉗位管損耗的大小,從而可以進一步優化效率。
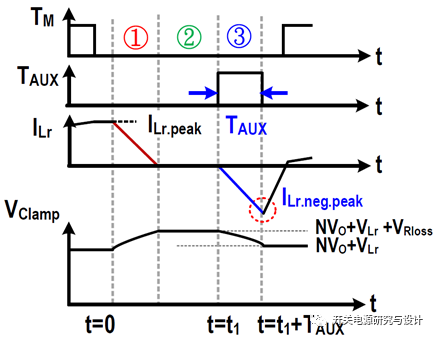
圖2 DRPC下ACF工作波形
2. 中載下的QR模式
當負載下降到一定范圍時,ACF將工作在傳統反激的準諧振QR工作模式,波形見圖3。在該模式下,Tm的時間長度基本不變,通過調節Tm的開通位置實現谷值導通。這樣,系統工作在輕微變頻狀態,從而使輸出電壓能夠在不同負載保持穩定。
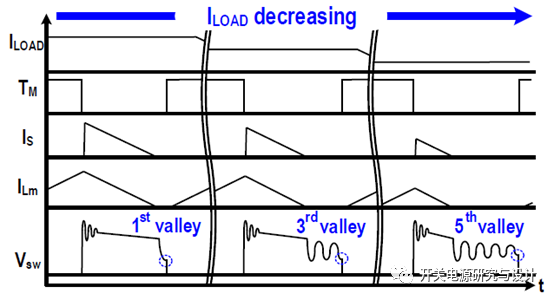
圖3 QR下的ACF工作波形
3. 輕載下的FF模式
當負載進一步下降時,系統工作在頻率折疊(frequency-foldback,FF)模式。該模式和QR剛好相反,谷底導通的位置保持不變,都在第六個谷底時開通主功率管,但Tm的導通時間不斷減小,用于實現不同負載下的調節。該模式下的頻率變化比QR變化劇烈。
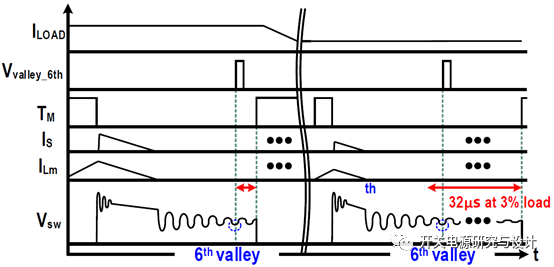
圖4 FF下的ACF工作波形
4. 待機下的綠色模式
當負載非常小時,ACF工作在綠色模式。該模式下,Tm的導通時間保持不變,開關頻率保持不變。
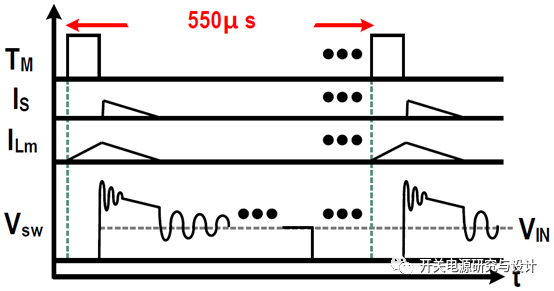
圖5 綠色模式下的ACF工作波形
通過這四個工作模式,ACF既實現在不同負載下的穩壓調節目標,也實現ZVS的調節功能,實現較高的效率工作。開關頻率的變化曲線如圖6所示。
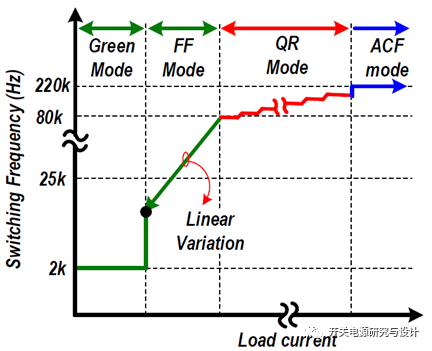
圖6 該控制方式下的頻率變化曲線
該控制方式的優缺點簡單分析如下:
1) ACF真正實現ZVS的負載范圍較窄,只能在DRPC模式下實現。雖然可以提高重載下ACF的峰值效率,但ACF的平均效率預估較低;
2) DRPC模式下實現ACF的能量主要依靠漏感中的能量,需要漏感大于一定的值,ZVS才可以在全輸入范圍內輕松實現;
3) DRPC模式下副邊電流出現“雙包”波形,不利于同步整流控制;
4) DRPC模式下鉗位管并不是嚴格的ZVS開啟,可能會增大鉗位管開關損耗;
5) DRPC模式下鉗位管具有較長的續流時間,不適合采用GaN半導體功率器件;
6) QR模式和FF模式下的谷底導通位置對控制要求較高,也需要考慮實際電路參數的漂移影響;
7)頻率變化范圍較寬,不利于磁性元件設計。
-
負載
+關注
關注
2文章
564瀏覽量
34326 -
變換器
+關注
關注
17文章
2097瀏覽量
109264 -
ZVS
+關注
關注
28文章
84瀏覽量
56533 -
反激變換器
+關注
關注
2文章
145瀏覽量
18189 -
ACF
+關注
關注
1文章
24瀏覽量
10725
發布評論請先 登錄
相關推薦
ACF與AHB反激變換器優缺點的對比分析
Silanna Semiconductor宣布擴展有源鉗位反激控制器(ACF)產品系列

有源鉗位反激(ACF)變換器控制方案(2)
有源鉗位反激(ACF)變換器控制方案(3)
ACF與AHB反激變換器的優缺點對比





 工商網監
工商網監
評論