") 純相位空間光調(diào)制器在PSF工程中的應(yīng)用
純相位空間光調(diào)制器在PSF工程中的應(yīng)用
一、引言
2014年諾貝爾化學(xué)獎(jiǎng)揭曉,美國及德國三位科學(xué)家Eric Betzig、Stefan W. Hell和William E. Moerner獲獎(jiǎng)。獲獎(jiǎng)理由是“研制出超分辨率熒光顯微鏡”,從此人們對點(diǎn)擴(kuò)散函數(shù)(PSF) 工程的認(rèn)識有了顯著提高。
Moerner 展示了 PSF 工程與 Meadowlark Optics SLM 的使用案例,用于熒光發(fā)射器的超分辨率成像和 3D 定位。PSF工程已被證明使顯微鏡能夠使用多種成像模式對樣本進(jìn)行成像,同時(shí)以非機(jī)械方式在模式之間變化。這允許對具有弱折射率的結(jié)構(gòu)進(jìn)行成像,以及對相位結(jié)構(gòu)進(jìn)行定量測量。已證明的成像方式包括:螺旋相位成像、暗場成像、相位對比成像、微分干涉對比成像和擴(kuò)展景深成像。
美國Meadowlark Optics 公司專注于模擬尋址純相位空間光調(diào)制器的設(shè)計(jì)、開發(fā)和制造,有40多年的歷史,該公司空間光調(diào)制器產(chǎn)品廣泛應(yīng)用于自適應(yīng)光學(xué),散射或渾濁介質(zhì)中的成像,雙光子/三光子顯微成像,光遺傳學(xué),全息光鑷(HOT),脈沖整形,光學(xué)加密,量子計(jì)算,光通信,湍流模擬等領(lǐng)域。其高分辨率、高刷新率、高填充因子的特點(diǎn)適用于PSF工程應(yīng)用中。
二、空間光調(diào)制器在PSF工程中的技術(shù)介紹
在單分子定位顯微鏡(SMLM)中,通過從相機(jī)視場中稀疏分布的發(fā)射點(diǎn)來估計(jì)單個(gè)分子的位置,從而克服了分辨率的衍射限制。可實(shí)現(xiàn)的分辨率受到定位精度和熒光標(biāo)簽密度的限制,在實(shí)踐中可能是幾十納米的數(shù)量級。有科研團(tuán)隊(duì)已經(jīng)將這種技術(shù)擴(kuò)展到三維定位。通過在光路中加入一個(gè)圓柱形透鏡或使用雙平面或多焦點(diǎn)成像,可以估算出分子的軸向位置。光斑的拉長(散光)或光斑大小的差異(雙平面成像)對軸向位置進(jìn)行編碼。將空間光調(diào)制器(SLM)與4F中繼系統(tǒng)結(jié)合到成像光路中,可以設(shè)計(jì)更廣泛的點(diǎn)擴(kuò)散函數(shù)(PSF),為優(yōu)化顯微鏡的定位性能提供了可能。
利用空間光調(diào)制器(SLM)對熒光顯微鏡進(jìn)行校準(zhǔn),可以建立一個(gè)遠(yuǎn)低于衍射極限的波前誤差,SIEMONS團(tuán)隊(duì)就利用Meadowlark空間光調(diào)制器實(shí)現(xiàn)了高精度的波前控制。原理證明和實(shí)驗(yàn)顯示,在1微米的軸向范圍內(nèi),在x、y和λ的精度低于10納米,在z的精度低于20納米。對這篇文獻(xiàn)感興趣的話可以聯(lián)系我們查閱文獻(xiàn)原文《High precision wavefront control in point spread function engineering for single emitter localization 》
下面我們來具體看看是如何應(yīng)用的,以及應(yīng)用效果如何。
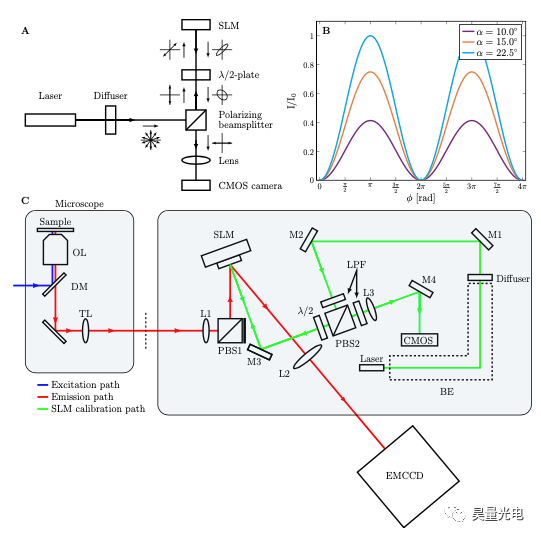
圖2. A)SLM校準(zhǔn)分支和通過光路的偏振傳輸示意圖。額外的線性偏振濾波器沒有被畫出來,因?yàn)樗鼈兣c偏振分光器對齊。B)相機(jī)上的強(qiáng)度響應(yīng)作為λ/2-板不同方向α的SLM的相位延遲的函數(shù)。C) 光學(xué)裝置的示意圖。一個(gè)帶有SLM的中繼系統(tǒng)被添加到顯微鏡的發(fā)射路徑中(紅色),一個(gè)單獨(dú)的SLM校準(zhǔn)路徑(綠色)被納入發(fā)射中繼系統(tǒng)中。這允許在實(shí)驗(yàn)之間進(jìn)行SLM校準(zhǔn)。BE:擴(kuò)束器,DM:分色鏡,L:鏡頭,LPF:線性偏振濾鏡,M:鏡子。OL:物鏡,PBS:偏振分光鏡,TL:管鏡。
光路如上圖2所示,包括一臺尼康Ti-E顯微鏡,帶有TIRF APO物鏡(NA = 1.49,M = 100),一個(gè)200毫米的管狀鏡頭,一個(gè)帶有SLM的中繼系統(tǒng)被建立在顯微鏡的一個(gè)出口端口。中繼系統(tǒng)包括兩個(gè)消色差透鏡,一個(gè)向列型液晶空間光調(diào)制器(LCOS)SLM(Meadowlark,XY系列,512x512像素,像素大小=15微米,設(shè)計(jì)波長=532納米)和一個(gè)偏振分光器,用于過濾未被SLM調(diào)制的X偏振光。第一個(gè)消色差透鏡在SLM上轉(zhuǎn)發(fā)光束。
第二個(gè)中繼鏡頭確保在EMCCD上對熒光物體進(jìn)行奈奎斯特采樣。顯微鏡配備了一套波長為405nm、488nm、561nm和642nm的合束激光器。
這個(gè)配置增加了一個(gè)用于校準(zhǔn)SLM的第二個(gè)光路。這個(gè)空降光調(diào)制器校準(zhǔn)光路是為測量入射到SLM上的X和Y偏振光之間的延遲差而設(shè)計(jì)的,為了測量某個(gè)SLM像素的調(diào)制,需要將SLM映射到校準(zhǔn)路徑的相機(jī)上。這種映射是通過在SLM上施加一個(gè)電壓增加的棋盤圖案來獲得的。平均捕獲的圖像和沒有施加電壓時(shí)的圖像之間的差異被用作角落檢測算法(來自Matlab - Mathworks的findcheckerboard)的輸入,以找到角落點(diǎn)。對這些點(diǎn)進(jìn)行仿生變換,并用于找到對應(yīng)于每個(gè)SLM像素的CMOS像素。
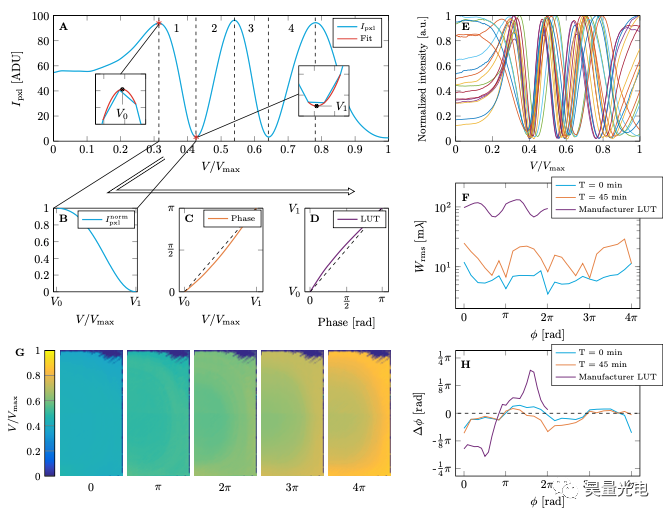
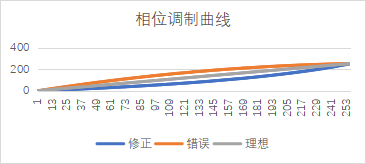
圖3. SLM校準(zhǔn)程序。A) 單個(gè)SLM像素的測量強(qiáng)度響應(yīng)作為應(yīng)用電壓的函數(shù)。每一個(gè)極值都對應(yīng)于等于π的整數(shù)倍的相位變化,并擬合一個(gè)二階多項(xiàng)式以提高尋找極值的精度。強(qiáng)度被分割成四個(gè)部分,它們被縮放為[0 1]。這個(gè)歸一化的強(qiáng)度(B)被轉(zhuǎn)換為相位(C),并反轉(zhuǎn)以創(chuàng)建該特定電壓段和像素的LUT(D)。E)20個(gè)隨機(jī)選擇的SLM像素的歸一化強(qiáng)度響應(yīng),顯示像素間的變化。F) 測量的波前均方根誤差是校準(zhǔn)后立即使用校準(zhǔn)LUT的相位的函數(shù),45分鐘后,以及制造商提供的LUT。G) 在不同的恒定相位下,用于成像光路的SLM部分的LUTs。暗點(diǎn)表示沒有3個(gè)最大值的像素。H) 測量的平均相位和預(yù)定相位之間的差異作為預(yù)定相位的函數(shù)。
圖3解釋了SLM像素的校準(zhǔn)程序。首先,以256步測量作為應(yīng)用電壓函數(shù)的強(qiáng)度響應(yīng),產(chǎn)生一連串的最小值和最大值,它們對應(yīng)于π或2π的遲滯。在被照亮的SLM平面內(nèi)的所有像素似乎有三個(gè)最大值,這意味著總的相位調(diào)制為4π或1094納米。這些極值出現(xiàn)的電壓是通過對極值附近的三個(gè)點(diǎn)進(jìn)行擬合拋物線來找到的,這增加了精度,并充分利用了SLM的16位控制。然后,強(qiáng)度被分為四段,用公式(11)的逆值對這些段進(jìn)行縮放并轉(zhuǎn)換為相位。相位響應(yīng)被用來為每個(gè)SLM像素構(gòu)建一個(gè)單獨(dú)的查找表(LUT),以補(bǔ)償SLM的非均勻性。LUT參數(shù)在SLM上平滑變化,并與肉眼可見的法布里-珀羅條紋大致對應(yīng),表明相位響應(yīng)的差異是由于液晶層厚度的變化造成的。額外的像素與像素之間的變化可能來自底層硅開關(guān)電路的像素與像素之間的變化。完整的校準(zhǔn)需要大約5分鐘(在四核3.3GHz i7處理器上的3分鐘掃描和2分鐘計(jì)算時(shí)間),但原則上可以優(yōu)化到運(yùn)行更快。
實(shí)驗(yàn)結(jié)果:
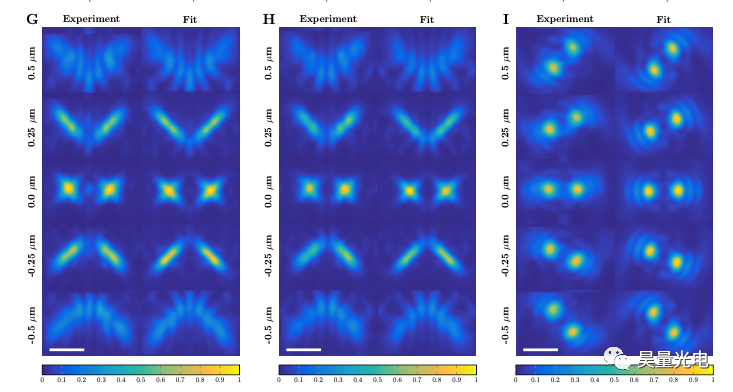
圖4 測量的PSF與矢量PSF模型擬合之間的PSF比較。G-I)平均測量的PSF是由大約108個(gè)光子攜帶的信號通過上采樣(3×)和覆蓋所有獲得的斑點(diǎn)編制而成。比例尺表示1μm。
圖4顯示PSF模型的預(yù)測結(jié)果。通過這種方式,實(shí)驗(yàn)的PSF是由~108個(gè)光子的累積信號建立起來的。實(shí)驗(yàn)和理論上的矢量PSF之間的一致性通常是非常好的,甚至在最大的離焦值的邊緣結(jié)構(gòu)也是非常匹配的。剩下的差異,主要是光斑的輕微變寬,是由于入射到相機(jī)上的光的非零光譜寬度,由于發(fā)射光譜的寬度和四帶分色器的帶通區(qū)域的寬度。邊緣結(jié)構(gòu)中也有一個(gè)小的不對稱性,這可能是由光學(xué)系統(tǒng)中殘留的高階球差造成的。
所有工程PSF的一個(gè)共同特點(diǎn)是,與簡單的二維聚焦斑點(diǎn)相比,它們的復(fù)雜性必須在PSF模型中得到體現(xiàn),該模型被用于估計(jì)三維位置(可能還有發(fā)射顏色或分子方向)的參數(shù)擬合算法。簡化的PSF模型,如高斯模型、基于標(biāo)量衍射的Airy模型、Gibson-Lanni模型,或基于Hermite函數(shù)的有效模型都不能滿足這一要求。一個(gè)解決方案是使用實(shí)驗(yàn)參考PSF,或用花樣擬合這樣的PSF作為模型PSF,或者使用一個(gè)或多個(gè)查找表(LUTs)來估計(jì)Z-位置。矢量PSF模型也可以用于復(fù)雜的3D和3D+λ工程PSF。眾所周知,矢量PSF模型是高NA熒光成像系統(tǒng)中圖像形成的物理正確模型。復(fù)雜的工程PSF的另一個(gè)共同特點(diǎn)是對擾亂設(shè)計(jì)的PSF形狀的像差的敏感性,并以這種方式對精度和準(zhǔn)確性產(chǎn)生負(fù)面影響。為了實(shí)現(xiàn)精確到Cramér-Rao下限(CRLB),即無偏估計(jì)器的最佳精度,光學(xué)系統(tǒng)的像差水平應(yīng)該被控制在衍射極限(0.072λ均方根波前像差),這個(gè)條件在實(shí)踐中往往無法滿足。因此,需要使用可變形鏡或?yàn)楫a(chǎn)生工程PSF而存在的SLM對像差進(jìn)行校正。自適應(yīng)光學(xué)元件的控制參數(shù)可以使用基于圖像的指標(biāo)或通過測量待校正的像差來設(shè)置。后者可以通過基于引入相位多樣性的相位檢索算法來完成,通常采用通焦珠掃描的形式。這已經(jīng)在高數(shù)值孔徑顯微鏡系統(tǒng)、定位顯微鏡中實(shí)現(xiàn),并用于提高STED激光聚焦的質(zhì)量。
三、PSF應(yīng)用對液晶空間光調(diào)制器的要求
1
光利用率
對于這個(gè)應(yīng)用來說,SLM將光學(xué)損失降到最低是很重要的。PSF工程使用SLM來操縱顯微鏡發(fā)射路徑上的波前。在不增加損失的情況下,熒光成像中缺乏信號。使用具有高填充系數(shù)的SLM可以最大限度地減少衍射的損失。
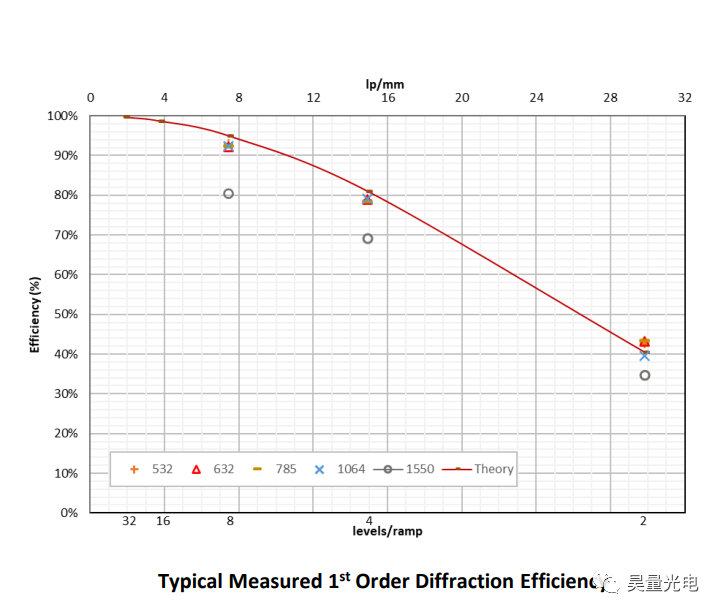
Meadowlark公司能提供標(biāo)速版95.6%的空間光調(diào)制器,分辨率達(dá)1920x1200,高刷新率版像素1024x1024,填充因子97.2%和dielectric mirror coated版本(100%填充率)。鍍介電膜版本的SLM反射率可以做到100%,一級衍射效率可以做到98%。高分辨率能在滿足創(chuàng)建復(fù)雜相位函數(shù)的同時(shí),能夠提升系統(tǒng)的光利用率。
2
刷新率(最高可達(dá)1KHz)
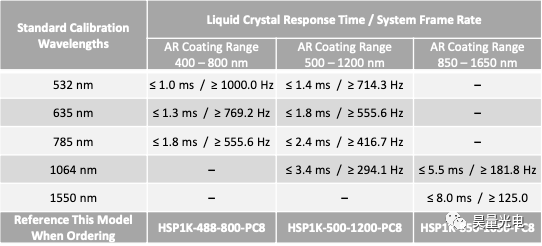
高速度可以實(shí)現(xiàn)實(shí)時(shí)的深層組織超分辨率成像。可見光波段最高可達(dá)1K Hz刷新速度(@532nm)。
3
分辨率(1920x1200)
高分辨率的SLM是創(chuàng)建三維定位所需的復(fù)雜相位函數(shù)的理想選擇,如此能夠?qū)γ總€(gè)小像元區(qū)域的光場進(jìn)行自由調(diào)控。
-
PSF
+關(guān)注
關(guān)注
0文章
6瀏覽量
7086 -
光調(diào)制器
+關(guān)注
關(guān)注
0文章
85瀏覽量
8374
發(fā)布評論請先 登錄
相關(guān)推薦
空間光調(diào)制器自適應(yīng)激光光束整形
設(shè)計(jì)相位型空間光調(diào)制器以生成高帽光束
相位型SLM硬件產(chǎn)品面型性能提升
使用液晶空間光調(diào)制器(SLM)提高激光近場光束質(zhì)量
HDSLM DMD空間光調(diào)制器Smart系列的主要功能

基于DMD空間光調(diào)制器的單像素成像實(shí)驗(yàn)系統(tǒng)設(shè)計(jì)
調(diào)制器在通信系統(tǒng)中有哪些應(yīng)用場景
什么是空間光調(diào)制器?
ΣΔ(Sigma-Delta)技術(shù)詳解(上):離散ΣΔ調(diào)制器
緊湊型矢量光場生成系統(tǒng)
基于空間光調(diào)制器彩色全息顯示--上海瞬渺光電技術(shù)有限公司
H01.6k-B4小體積光纖相位調(diào)制器
面向分布式聲波傳感的硅基超高消光比調(diào)制器
常見的光調(diào)制器有哪些 光調(diào)制器的作用
四種常見的高速光調(diào)制器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論