 測量汽車CAN-BUS總線信號及波形分析-汽修示波器
測量汽車CAN-BUS總線信號及波形分析-汽修示波器
隨著汽車電子裝置的不斷增多,采用串行總線實現多路傳輸,組成汽車電子網絡,是一種既可靠又經濟的做法。
在最初的傳統汽車電路中,動力總成模塊與車身模塊的連接都是點對點的連接,這樣線路會日益復雜,線路的增加,也會導致汽車故障率的增加。
后來CAN總線在汽車上使用越來越廣泛。所謂多路傳輸,指在計算機局域網中,將多種信息混合或交叉通過一個通信信道傳送的方式。一個具有多路傳輸功能的網絡允許多個計算機同時對它進行訪問。
CAN(多路傳輸技術)應用于汽車上,可以使得布線更加簡化,成本降低,電控單元之間交流更加簡單和快捷,更少的傳感器數目,實現信息資源共享。
多路傳輸通信網絡應用于多模塊操作系統上。模塊由普通雙絞線相互連接,并使用數據鏈接插口作為診斷接口。信息的交換以類似于電話合用線的方式進行,模塊之間使用信息及專用的企業標準協議進行通信。信息內容涉及控制、狀態或診斷信息以及運行參數等。雙絞線具有提供冗余備份的優點,即當一條線路中斷時,可由另一條線路保證系統運行。而且,雙絞線降低了外界對多路通信網絡的電子干擾,也降低了多路通信網絡自身產生的電子干擾。
我們來看下如何用示波器來測量汽車的CAN總線信號,首先找到汽車的OBD接口
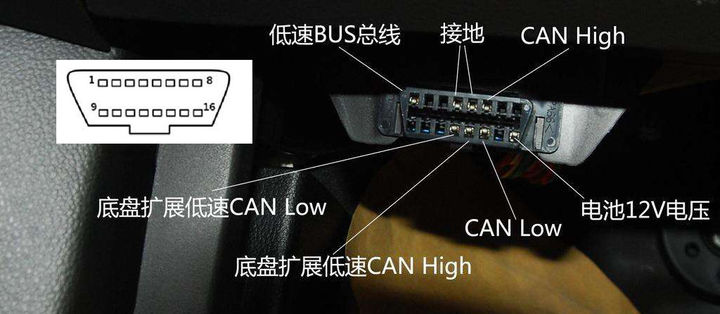
來看下接口引腳定義:
4.車身接地 5.信號接地 6.CAN high(ISO 15765-4)
14.CAN low(ISO15765-4)16.蓄電池電壓
3.CAN high(備用)11.CAN low(備用)
將示波器通道1和2連上BNC轉香蕉頭線,黑色香蕉頭接一個鱷魚夾,連接上4號引腳接地。通道一接上OBD的PIN6 (CAN_H),通道二接上OBD的PIN14(CAN_L) ,打開示波器解碼菜單,進行CAN總線配置。調節總線閾值電平,得到解碼數據,設置觸發方式為解碼觸發,以及數據幀ID穩定波形。調節垂直檔位和時基觀察信號。

如上就是CAN-BUS的正常波形,CAN-H與CAN-L波形一致,但極性相反。
當CAN-BUS系統處于休眠狀態時,電控單元ECU通過EN和STB接頭把蓄電池電壓導入CAN-H和CAN-L線。此時,CAN-H電壓接近12V,CAN-L電壓接近0V
如果CAN-H線對地短路時,則CAN-L為正常傳輸信號波形,CAN-H信號電壓為0V
CAN-L線對地短路時,CAN-H為正常傳輸信號波形,CAN-L信號電壓為0V
當CAN-H和CAN-L線都對地短路時,則2者信號皆為0V電壓。
當CAN-H和CAN-L線互相短路時,其信號電壓極性相同,波形趨于一致。
當CAN-H線對電源短路時,其電壓始終為12V,CAN-L線波形正常。
當CAN-L線對電源短路時,其電壓始終為12V,CAN-H線波形正常。
當CAN-L和CAN-H都對電源短路,則其2者電壓都為蓄電池電壓。
當CAN-H線斷路時,CAN-H線波形依然正常,而CAN-L線則始終處于0電位。
當CAN-L線斷路時,CAN-L線電壓處于高電位,保持5V,而CAN-H線波形依然正常。

CAN幀的類型:
Data Frame:數據幀,用于傳遞0-8byte數據。
Remote Frame:遠程幀,用于要求其它節點發送相同ID的數據幀。
Error Frame:錯誤幀,總線上任何節點發現錯誤均可發送錯誤幀。
Overload Frame:過載幀,總線負荷過高時,在數據幀或者遠程幀之間產生。
有的示波器會內置好設置軟件,點擊即可自動設置好相關參數。

-
示波器
+關注
關注
113文章
6267瀏覽量
185386
發布評論請先 登錄
相關推薦
CAN-Bus總線電纜行業技術發展趨勢及市場空間預測報告
如何使用示波器測試CAN信號

CAN-bus應用筆記:節點篇








 工商網監
工商網監
評論