 干貨|虹科KPA MoDK運行環境與搭建步驟(2)——MoDK運行環境搭建
干貨|虹科KPA MoDK運行環境與搭建步驟(2)——MoDK運行環境搭建
“虹科”工業自動化
本系列文章旨在幫助讀者對虹科KPA Automation體系進行一個簡要的理解,并且能使用MoDK快速進行上手操作,包括:虹科KPA Automation、虹科KPA MoDK簡介,虹科KPA MoDK的運行環境搭建與例程測試。本文檔搭建的虹科KPA MoDK運行環境,是基于Win10,并且是以C/C++為開發語言進行的。若您有任何疑問,歡迎您聯系我們(400-999-3848),虹科工程師將給您專業的解答。
MoDK運行環境搭建 STRAT!
程序準備:
# 虹科KPA EtherCAT Studio
#虹科KPA MDK
# 高于2.8版本的CMAKE
#虹科KPA MoDK
Hongke
01. 安裝虹科KPA EtherCAT Studio
虹科KPA EtherCAT Studio是一站式的開發軟件,可以連接至本地或遠程的虹科KPA Master,進行整個EtherCAT網絡的組態掃描,狀態機切換,過程數據地址表確認等等操作,實現EtherCAT網絡的組態、監視、診斷等功能。
結合MoDK使用時,我們需要虹科KPA EtherCAT Studio進行整個ECAT網絡的組態,以及電機軸的各項參數設置,如綁定驅動器(伺服),驅動模式,電機最大速度、加速度、加加速度等等。
安裝虹科KPA EtherCAT Studio
請注意,MoDK所需要的Motion Configuration Utility插件,只有在虹科KPA EtherCAT Studio 2中才有,所以我們安裝的Studio版本,也必須是2.x版本的。步驟流程如下:
獲取Studio安裝包/Download
如果您在虹科的合作伙伴KPA的官網上自行獲取Studio安裝包,那么流程將相對復雜,大致流程如下:注冊KPA賬戶→填寫緣由申請Trial版本的Studio(或者其他的試用產品)→等待KPA批復→KPA確認后在您的帳戶中提供下載鏈接。
由于流程復雜而且KPA批復的時間不定,我們虹科會給您提供所有使用產品的安裝包。如果您有這個需求,歡迎撥打400-999-3848。
安裝Studio/Installation
獲取安裝包后,您會得到一個msi安裝文件,點擊即進入安裝流程。請注意安裝時候的兩個路徑,其中一個是Studio程序本體的安裝路徑,另外一個是Studio所需要調用的一些周邊數據的路徑,包括插件(如MoDK所需要的Motion Configuration Utility)、ECAT從站庫等等。您可以自行修改安裝目錄。
Studio打開時需要掃描從站庫文件夾加載ECAT從站庫,這個過程耗時較長,且其中多數從站都不會用到,導致用戶體驗不佳,您可以參照以下步驟,快速加載Studio:打開從站庫文件夾,進行備份后刪除,然后回到Studio,右鍵從站庫空白處,點擊“Reload collection”,可觀察從站庫已清空,此時重新打開Studio,可以看到Studio的啟動加載時間極大縮短了。
此時開啟Studio后,只需要將將所需設備的xml放入從站庫文件夾,重新加載從站庫即可。
為Studio綁定License/License
請注意,Studio可以運行在無需License的demo模式下,其性能會有所限制,僅允許從站有15個字節的PDO數據,多于15字節則PDO數據無法下發,并且運行其單次運行時間會有限制。MDK/MoDK運行環境的單次運行時間最多為1小時,1小時后運行環境將自動關閉。
Hongke
02. 安裝虹科KPA MDK
虹科KPA MDK(Master Development kit)包括虹科KPA MRT(Master Runtime)和虹科KPA MIP(Master Integration),前者是虹科KPA Master的運行環境,后者是虹科KPA Master的頭文件、庫文件以及例程源代碼。兩者均以安裝包的形式提供,請注意MoDK目前僅支持虹科KPA MDK 1.6及以下版本,虹科KPA MDK 2.0以上暫不支持。
安裝時的注意事項
● 虹科KPA MRT的安裝過程中包括WinPcap 4.1.3的安裝,可能會出現WinPcap不支持當前系統(WIN10)的問題。但點擊確定后仍可以完成安裝。●安裝虹科KPA MIP時,需要記住Installation location的安裝路徑,在下一節CMAKE編譯中,我們需要指定的MDK引用路徑,就在其中。●安裝完成后會提示重啟計算機,您可以在安裝完其余組件后再一次性重啟。03
VS 2019、V-REP機器人仿真平臺安裝
嚴格上來說Visual Studio的版本并沒有嚴格規定,只要不是太過時都可以使用,筆者使用的是VS 2019 community進行開發。Visual Studio的資源及安裝流程在網上比較常見,請您自行查找,或者也可以找我們索要安裝包。由于cmake編譯生成MoDK需要使用現成的編譯器,請務必在cmake編譯生成MoDK工程前完成VS(或其它IDE)的安裝。
V-REP機器人仿真平臺是一個開源的機器人仿真平臺,使用EDU(教育版)可以免費使用其所有功能,其官網下載鏈接為:https://www.coppeliarobotics.com/downloads
04
CMAKE編譯MoDK例程
上文提到,MoDK可根據不同的OSAL庫文件運行于不同的操作系統下,為了實現這種平臺無關性,MoDK本身僅以源代碼和庫的形式提供,包括C文件、頭文件、庫文件以及CMAKE list文件,不包括任何平臺相關的項目文件,需要您自己手動使用CMAKE進行源代碼編譯。
-
自動化
+關注
關注
29文章
5563瀏覽量
79240
發布評論請先 登錄
相關推薦
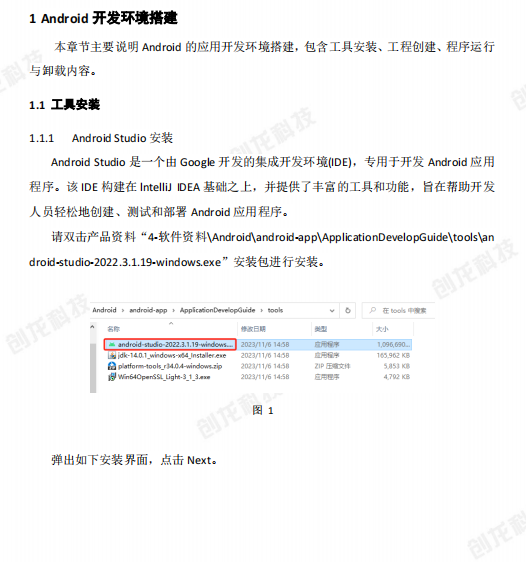
如何搭建企業AI開發環境
超級干貨!本地搭建代碼托管平臺Gitea

SSM開發環境的搭建教程 SSM與Spring Boot的區別
【MM32F5270】Keil開發環境搭建
Docker運行環境安裝
TI RF Transceiver EVM自動化環境搭建方法

pycharm配置pytorch運行環境
pytorch環境搭建詳細步驟
PyTorch深度學習開發環境搭建指南
請問Eclipse環境如何搭建IoT Solution?
云服務器的linux中如何搭建php運行環境?
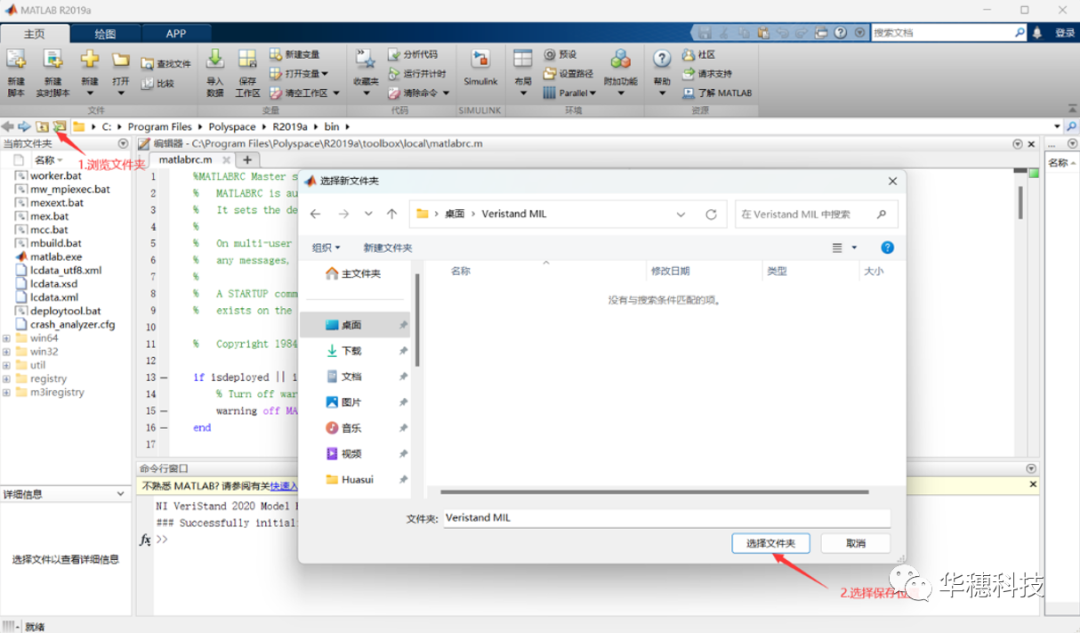
使用VeriStand搭建MIL測試環境





 工商網監
工商網監
評論