") 瑞薩e2studio----外部中斷&定時器配置輸入捕獲測量頻率
瑞薩e2studio----外部中斷&定時器配置輸入捕獲測量頻率

1.概述
本篇文章主要介紹如何使用e2studio對瑞薩單片機外部中斷進行輸入捕獲,同時通過定時器計算其頻率和占空比,同時輸入一個PWM驗證是否正確。
2.硬件準備
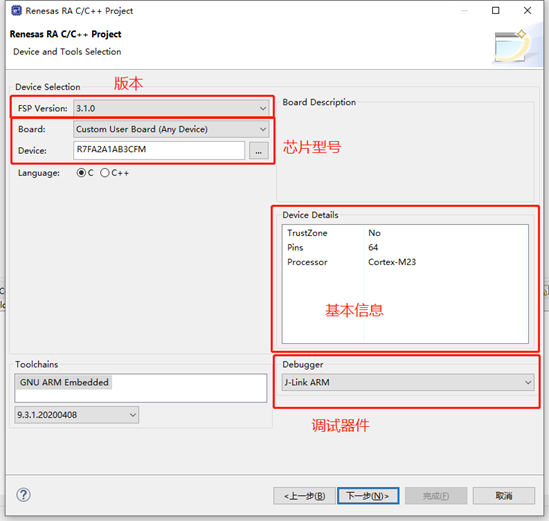
首先需要準備一個開發(fā)板,這里我準備的是芯片型號 R7FA2L1AB2DFL 的開發(fā)板。
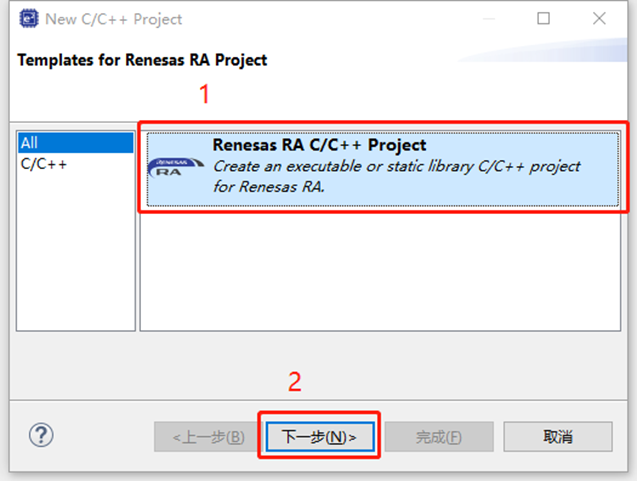
3.新建工程

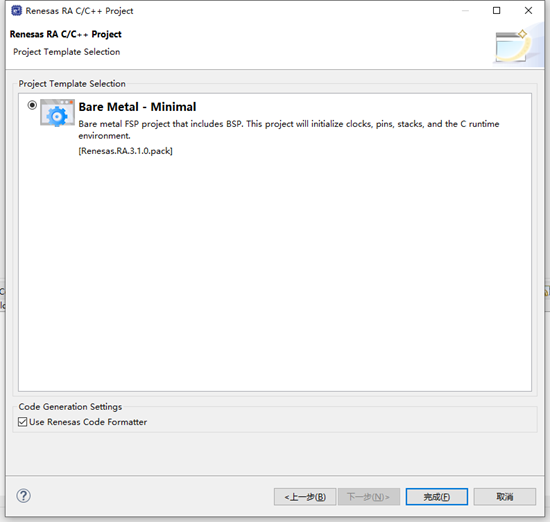
4.工程模板
5.保存工程路徑

6.芯片配置
本文中使用R7FA2L1AB2DFL來進行演示。
7
7.工程模板選擇
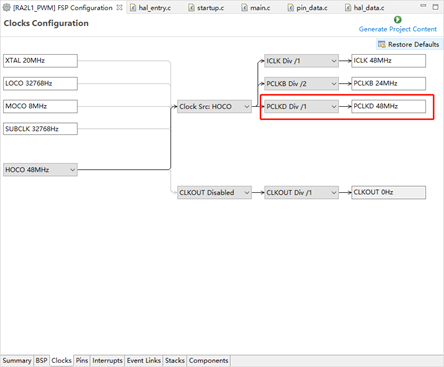
8.選擇定時器

時鐘源在這設置的是PCKLD 48M 。
可以通過修改該頻率來修改占空比頻率。
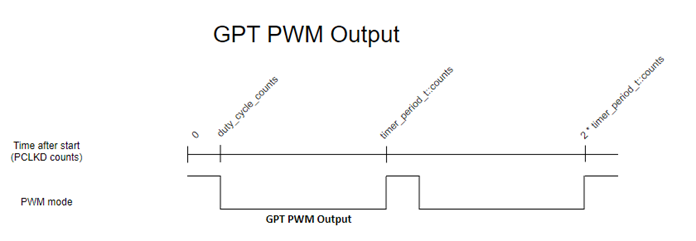
9.PWM(脈沖寬度調(diào)制)
脈沖寬度調(diào)制是一種模擬控制方式,根據(jù)相應載荷的變化來調(diào)制晶體管基極或MOS管柵極的偏置,來實現(xiàn)晶體管或MOS管導通時間的改變,從而實現(xiàn)開關穩(wěn)壓電源輸出的改變。這種方式能使電源的輸出電壓在工作條件變化時保持恒定,是利用微處理器的數(shù)字信號對模擬電路進行控制的一種非常有效的技術。脈沖寬度調(diào)制是利用微處理器的數(shù)字輸出來對模擬電路進行控制的一種非常有效的技術,廣泛應用在從測量、通信到功率控制與變換的許多領域中。
在瑞薩RA系列MCU中有兩種定時器,一種是通用PWM定時器GPT,另外一種是異步通用定時器AGT。
頻率=主頻/period
+占空比=cycle/period
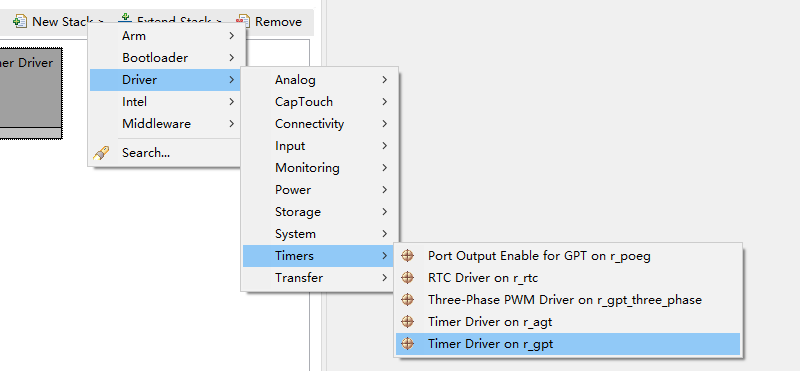
10.定時器配置
點擊Stacks->New Stack->Driver->Timers->Timer Driver on r_gpt。
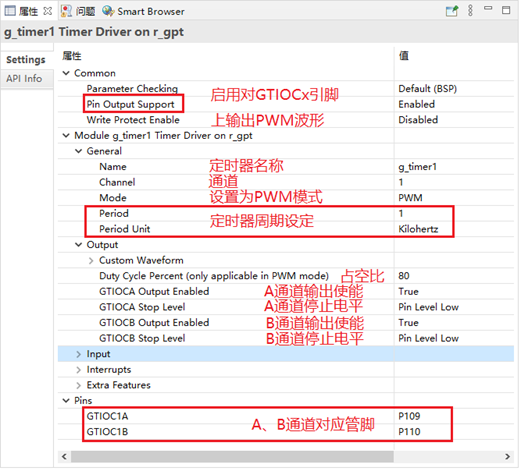
11.定時器輸出PWM配置
設置PWM輸出,輸出頻率為1kHz,占空比為80%。
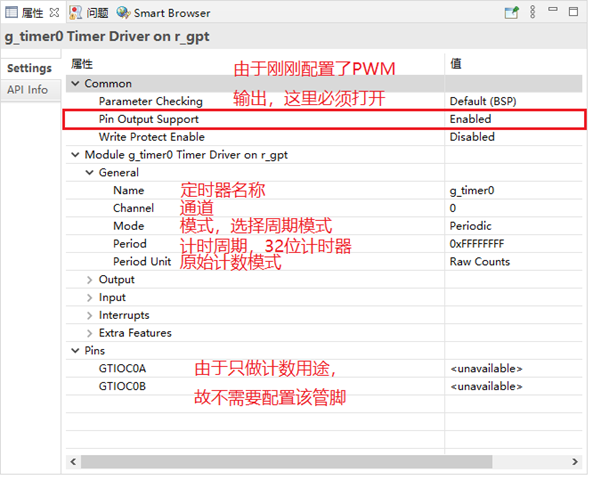
12.定時器輸入捕獲配置
點擊Stacks->New Stack->Driver->Timers->Timer Driver on r_gpt。
設置定時器制作計數(shù)器配置,由于不需要對上升沿和下降沿進行捕獲,故只需配置為計數(shù)模式即可。
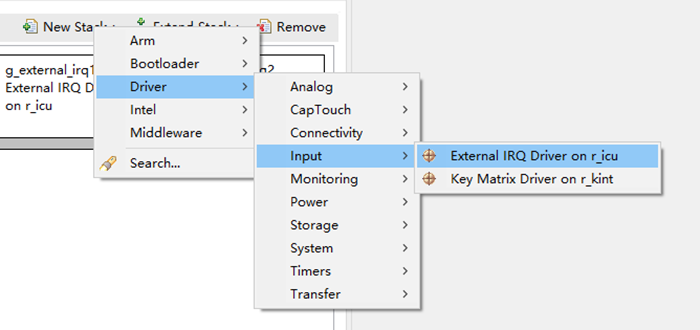
13.IRQ配置
點擊Stacks->New Stack->Driver->Input -> External IRQ Driver on r_icu 。
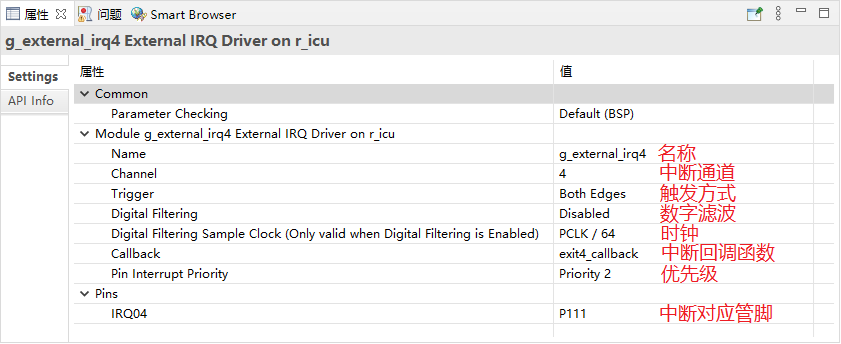
14.IRQ屬性配置
由于需要計算頻率和占空比,故需要設置觸發(fā)方式為雙邊觸發(fā)的模式。
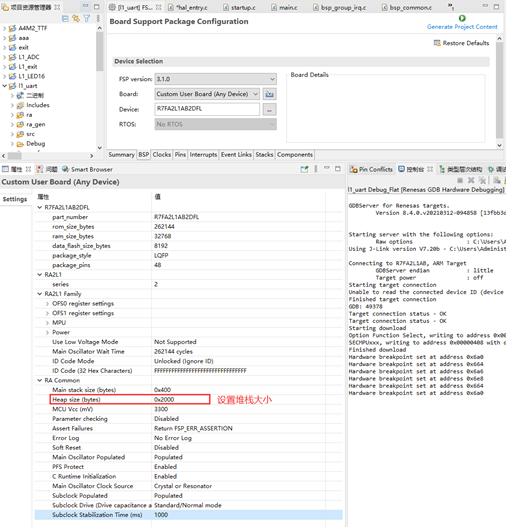
15.設置e2studio堆棧
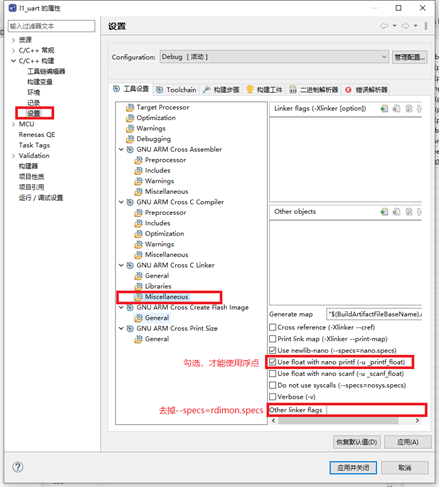
16.e2studio的重定向printf設置
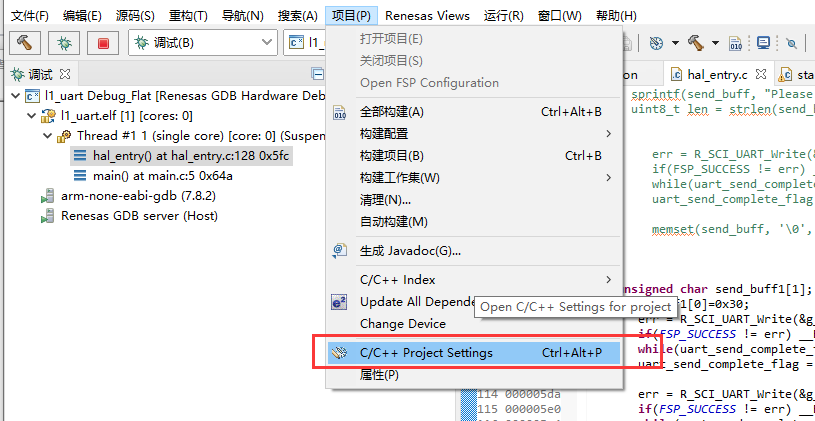
C++ 構建->設置->GNU ARM Cross C Linker->Miscellaneous去掉Other linker flags中的 “--specs=rdimon.specs”
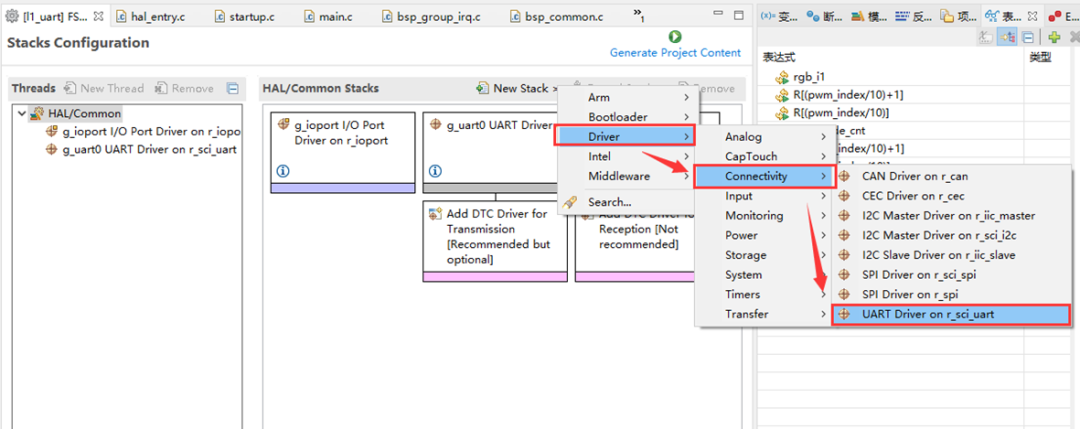
17.UART配置
點擊Stacks->New Stack->Driver->Connectivity -> UART Driver on r_sci_uart。
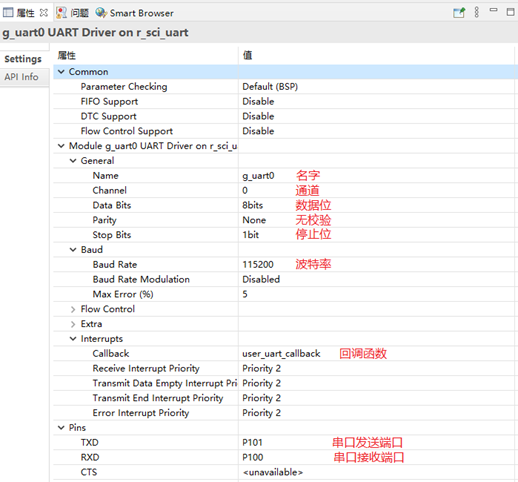
18.UART屬性配置
配置串口,用于打印數(shù)據(jù)。
19.printf輸出重定向到串口
打印最常用的方法是printf,所以要解決的問題是將printf的輸出重定向到串口,然后通過串口將數(shù)據(jù)發(fā)送出去。
注意一定要加上頭文件#include
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i;i++)>
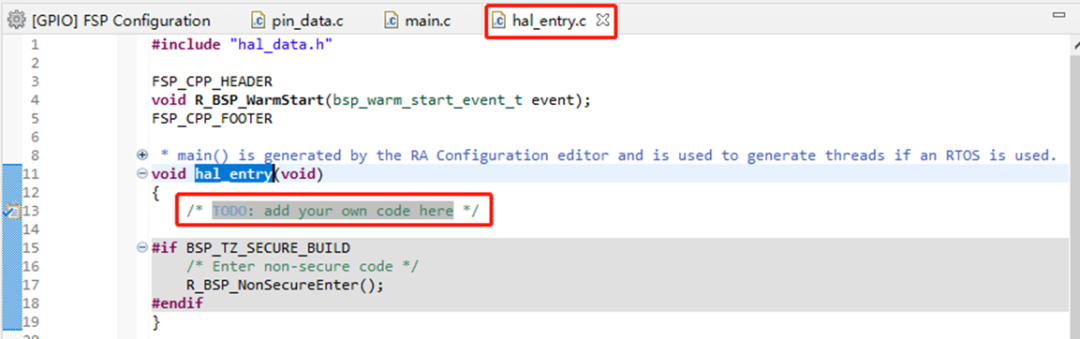
20.工程文件
打開hal_entry.c,可以看到在hal_entry函數(shù)內(nèi),注釋著可以在這輸入自己的代碼。
21.占空比與頻率計算
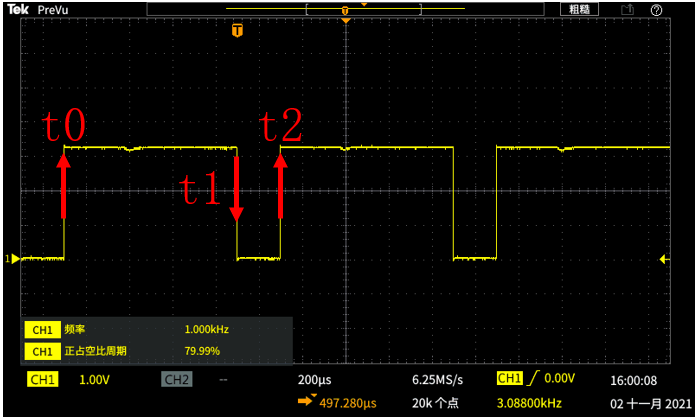
占空比=(t1-t0)/(t2-t0)
頻率=(t2-t0)/時鐘頻率= =(t2-t0)/48M
22.回調(diào)函數(shù)exit4_callback()
由于設置了上升沿和下降沿都會進入回調(diào)函數(shù)中,故需要判斷引腳電平來判斷是屬于高電平還是低電平。
bsp_io_level_t p_port_value_port_111;
/*讀取端口電平狀態(tài),如果是低電平則發(fā)生的是下降沿,高電平則是上升沿*/
R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_01_PIN_11, &p_port_value_port_111);
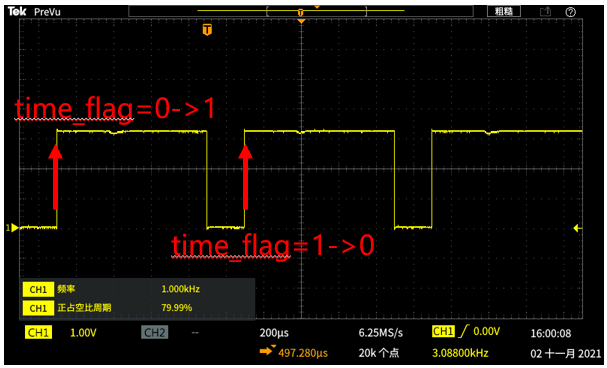
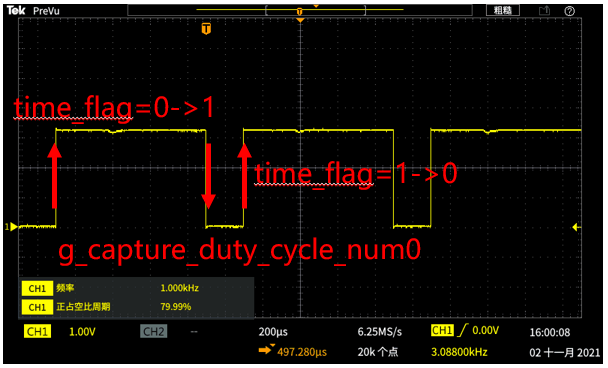
周期需要2個上升沿去判斷,設定第一個上升沿time_flag由0變?yōu)?,則第二個上升沿則為time_flag由1變?yōu)?.
計算周期需要注意定時器周期計數(shù)器溢出,若存在time_flag= 0->1讀取的計數(shù)值大于time_flag= 1->0讀取的計數(shù)值,則一個周期為g_capture_num=current_period_counts+g_capture_num1-g_capture_num0。
若沒有溢出,則g_capture_num=g_capture_num1-g_capture_num0。
頻率則需要計算下降沿到time_flag=1的一個周期,在除以g_capture_num(48M)。
計算頻率需要注意定時器周期計數(shù)器溢出,若存在time_flag= 0->1讀取的計數(shù)值大于g_capture_duty_cycle_num0讀取的計數(shù)值,則一個周期為g_capture_num=current_period_counts+g_capture_num1-g_capture_num0。若沒有溢出,則g_capture_duty_cycle_num=g_capture_duty_cycle_num0-g_capture_num0。
23.代碼
#include "hal_data.h"
#include
FSP_CPP_HEADER
void R_BSP_WarmStart(bsp_warm_start_event_t event);
FSP_CPP_FOOTER
fsp_err_t err = FSP_SUCCESS;
volatile bool uart_send_complete_flag = false;//串口發(fā)送完畢標志位
volatile bool time_flag = 0;//上升沿標志位
volatile uint64_t g_capture_num =0;//兩個上升沿之間的周期
volatile uint64_t g_capture_num0 =0;//第0個上升沿定時器計數(shù)值
volatile uint64_t g_capture_num1 =0;//第1個上升沿定時器計數(shù)值
volatile uint64_t g_capture_frequency = 0;//頻率
volatile float g_capture_duty_cycle =0;//占空比
volatile int g_capture_duty_cycle_num =0;//+占空比周期
volatile uint64_t g_capture_duty_cycle_num0 =0;//下降沿定時器計數(shù)值
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i=g_capture_num0)
g_capture_num=g_capture_num1-g_capture_num0;
else
g_capture_num=current_period_counts+g_capture_num1-g_capture_num0;
g_capture_frequency= frequency/g_capture_num;//計算頻率
}
}
else
{
if(time_flag==1)
{
g_capture_duty_cycle_num0=status.counter;
if(g_capture_duty_cycle_num0>=g_capture_num0)
g_capture_duty_cycle_num=g_capture_duty_cycle_num0-g_capture_num0;
else
g_capture_duty_cycle_num=current_period_counts+g_capture_duty_cycle_num0-g_capture_num0;
g_capture_duty_cycle=(g_capture_duty_cycle_num*100/(float)g_capture_num);//占空比
}
}
}
void hal_entry(void)
{
/* TODO: add your own code here */
err = R_SCI_UART_Open(&g_uart0_ctrl, &g_uart0_cfg);
assert(FSP_SUCCESS == err);
/* Initializes the module. */
err = R_GPT_Open(&g_timer0_ctrl, &g_timer0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
/* Start the timer. */
(void) R_GPT_Start(&g_timer0_ctrl);
/* Enable captures. Captured values arrive in the interrupt. */
(void) R_GPT_Enable(&g_timer0_ctrl);
/* Initializes the module. */
err = R_GPT_Open(&g_timer1_ctrl, &g_timer1_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
/* Start the timer. */
(void) R_GPT_Start(&g_timer1_ctrl);
/* Configure the external interrupt. */
fsp_err_t err = R_ICU_ExternalIrqOpen(&g_external_irq4_ctrl, &g_external_irq4_cfg);
assert(FSP_SUCCESS == err);
/* Enable the external interrupt. */
/* Enable not required when used with ELC or DMAC. */
err = R_ICU_ExternalIrqEnable(&g_external_irq4_ctrl);
assert(FSP_SUCCESS == err);
while(1)
{
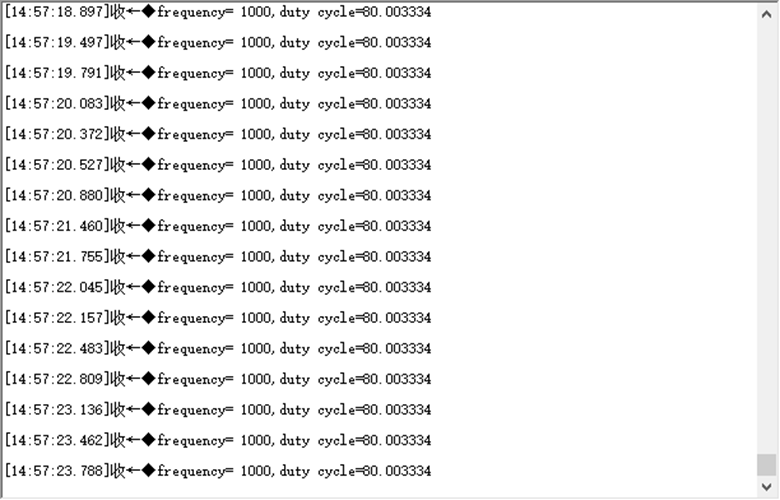
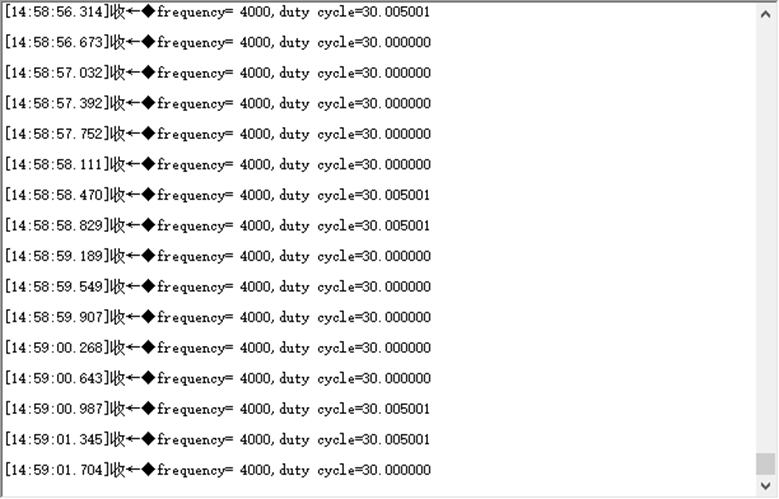
printf("frequency= %lld,duty cycle=%f\n",g_capture_frequency,g_capture_duty_cycle);
g_capture_num=0;
g_capture_duty_cycle=0;
R_BSP_SoftwareDelay (200, BSP_DELAY_UNITS_MILLISECONDS);
}
#if BSP_TZ_SECURE_BUILD
/* Enter non-secure code */
R_BSP_NonSecureEnter();
#endif
};i++)>
24.結果演示
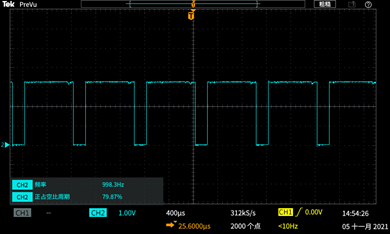
頻率1K 占空比80%
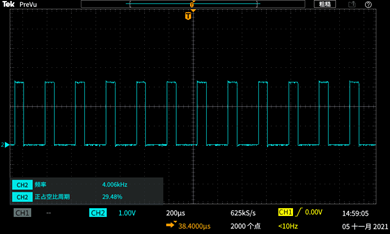
頻率4K 占空比30%
25.視頻教學
視頻教學稍后會在B站官方賬號更新,請留意B站視頻更新~

原創(chuàng):By RA_Billy Xiao
原文標題:瑞薩e2studio----外部中斷&定時器配置輸入捕獲測量頻率
文章出處:【微信公眾號:RA生態(tài)工作室】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
mcu
+關注
關注
146文章
17127瀏覽量
350997 -
ARM
+關注
關注
134文章
9087瀏覽量
367390 -
嵌入式
+關注
關注
5082文章
19107瀏覽量
304830 -
開發(fā)板
+關注
關注
25文章
5033瀏覽量
97375
發(fā)布評論請先 登錄
相關推薦
北美運營商AT&T認證中的VoLTE測試項
北美運營商AT&T的認證測試內(nèi)容涵蓋了多個方面,以確保設備和服務的質(zhì)量、兼容性以及用戶體驗。在AT&T的認證測試中,VoLTE(VoiceoverLTE)測試項是一個重要的組成部分

北美運營商AT&amp;amp;T認證的測試內(nèi)容有哪些?
北美運營商AT&T的認證測試內(nèi)容涵蓋了多個方面,以確保設備和服務的質(zhì)量、兼容性以及用戶體驗。以下是英利檢測整合的AT&T認證的主要測試內(nèi)容:基礎認證測試聯(lián)邦通信委員會(FCC

迅為itop-3568開發(fā)板AMP雙系統(tǒng)使用手冊之燒寫AMP鏡像
迅為itop-3568開發(fā)板AMP雙系統(tǒng)使用手冊之燒寫AMP鏡像
北美運營商AT&amp;amp;T認證的費用受哪些因素影響
申請北美運營商AT&T認證的價格因多種因素而異,包括產(chǎn)品類型、認證范圍、測試難度等。一般來說,申請AT&T認證的費用可能相對較高,因為AT&T作為北美地區(qū)的主要電信運營商,其

onsemi LV/MV MOSFET 產(chǎn)品介紹 &amp;amp; 行業(yè)應用
01直播介紹直播時間2024/10/281430直播內(nèi)容1.onsemiLV/MVMOSFET產(chǎn)品優(yōu)勢&市場地位。2.onsemiLV/MVMOSFETRoadmap。3.onsemiT10

思瑞浦車規(guī)級產(chǎn)品矩陣,全面覆蓋汽車級CAN&amp;amp;LIN、LDO需求
聚焦高性能模擬芯片和嵌入式處理器近期,思瑞浦為廣大工程師帶來了《思瑞浦車規(guī)級產(chǎn)品矩陣,全面覆蓋汽車級CAN&LIN、LDO需求》的在線研討會直播,重點介紹了思

OC7201C資料(PCB &amp; 原理圖)
電子發(fā)燒友網(wǎng)站提供《OC7201C資料(PCB & 原理圖).zip》資料免費下載
發(fā)表于 07-18 16:19
?1次下載
FS201資料(pcb &amp; DEMO &amp; 原理圖)
電子發(fā)燒友網(wǎng)站提供《FS201資料(pcb & DEMO & 原理圖).zip》資料免費下載
發(fā)表于 07-16 11:24
?0次下載
北美運營商AT&amp;amp;T認證入庫產(chǎn)品范圍名單相關
AT&T作為全球領先的通信服務運營商之一,通過AT&T認證不僅是對產(chǎn)品質(zhì)量的認可,更是產(chǎn)品打開北美市場大門的重要憑證。然而,或許您還不清楚AT&T認證入庫的產(chǎn)品范圍,接下來
解讀北美運營商,AT&amp;amp;T的認證分類與認證內(nèi)容分享
在數(shù)字化日益深入的今天,通信技術的穩(wěn)定與安全對于個人、企業(yè)乃至整個國家都至關重要。作為北美通信領域的領軍者,AT&T一直致力于為用戶提供高效、可靠的通信服務。而在這背后,AT&T
在TSMaster中加載基于DotNet平臺的Seed&amp;amp;Key
在UDS診斷過程中,會涉及到安全訪問的問題,也就是所謂的Seed&Key。TSMaster診斷模塊支持通過.dll文件載入Seed&Key算法用于安全訪問解鎖。在最近發(fā)布

瑞薩與RT-Thread推出基于RT-Thread&amp;OpenMV的RA8人機交互方案
瑞薩與戰(zhàn)略合作伙伴RT-Thread攜手于2024年2月底正式發(fā)布了全新的硬件產(chǎn)品——基于RT-Thread&OpenMV的RA8人機交互解決方案Vision Board。
安富利帶你揭秘IP&amp;E元器件的賦能之路
IP&E,是Interconnect(互連)、Passive(無源)和Electromechanical(機電)的縮寫,代表著電子元器件中最為基礎和重要的分支之一。
Open RAN的未來及其對AT&amp;T的意義
3月14日消息,在“Connected America 2024”會議上,AT&T高級副總裁兼網(wǎng)絡首席技術官Yigal Elbaz討論了Open RAN 的未來及其對AT&T的意義。






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論