 智嵌物聯ZQWL八路串口繼電器控制器用戶使用說明
智嵌物聯ZQWL八路串口繼電器控制器用戶使用說明
一、關于手冊
1.1命名規則
智嵌物聯繼電器控制設備的命名規則如圖1.1所示。
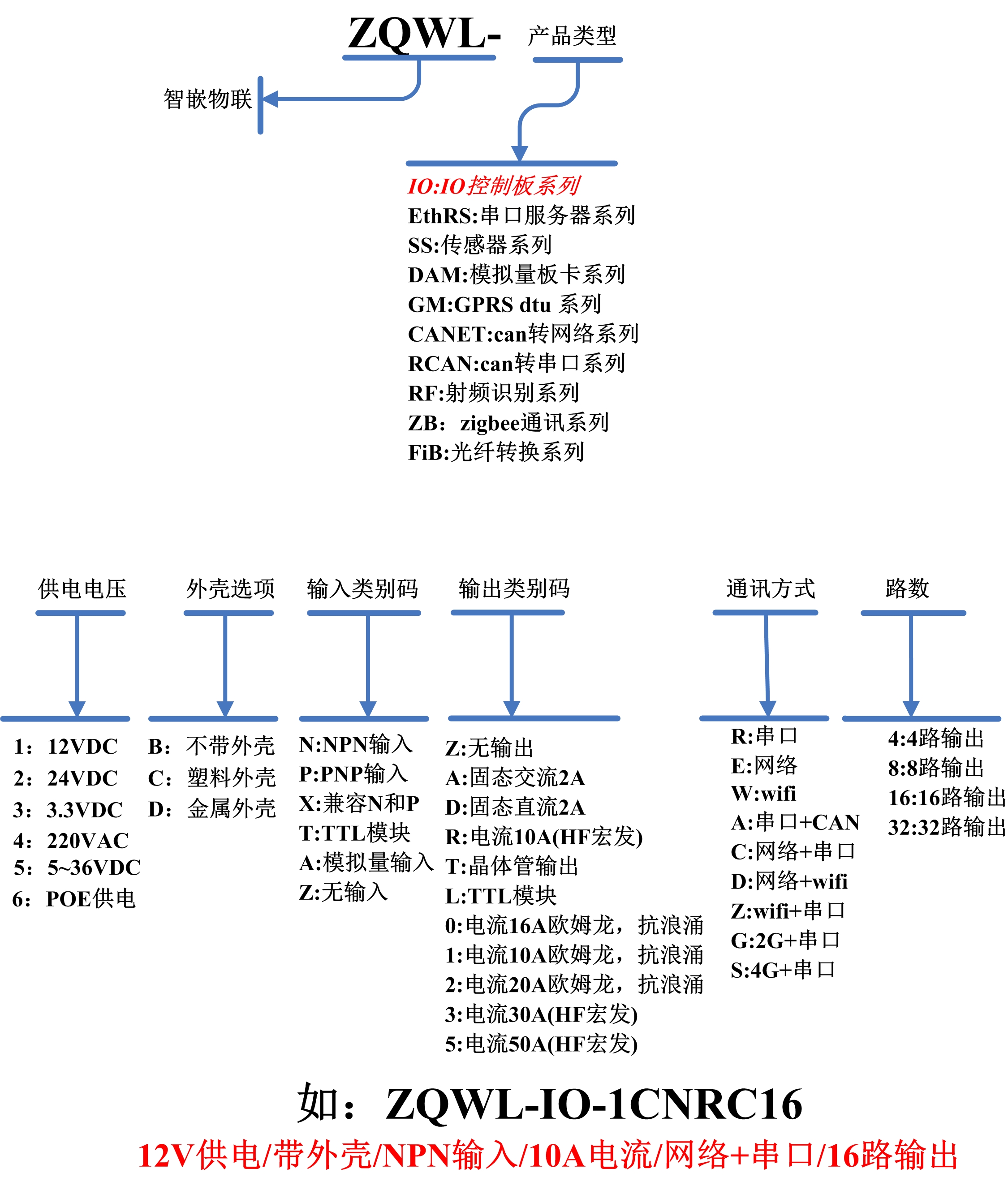
圖1.1命名規則
1.2本手冊適用型號
除特別說明,本手冊所介紹的功能均適用型號如表1.1所示。
不同型號的設備在硬件參數上有所差別,軟件功能上完全一樣,本手冊的案例以ZQWL-IO-1BX1R8為例進行說明,其他型號的設備用法完全一樣。

1.3相關產品資料下載
4路串口繼電器控制器使用手冊下載地址:點擊下載
8路串口繼電器控制器使用手冊下載地址:點擊下載
16路串口繼電器控制器使用手冊下載地址:點擊下載
32路串口繼電器控制器使用手冊下載地址:點擊下載
ZQWL-IO-1BN1A8使用手冊下載地址:點擊下載
ZQWL-IO-1BX1A16使用手冊下載地址:點擊下載
配置工具下載地址:點擊下載
二、產品快速入門
8路串口繼電器控制器,是實現8路開關量采集(輸入)和8路繼電器輸出的IO控制板。控制板具有RS232和RS485通訊接口,可以通過Modbus RTU或自定義協議實現對該控制板的控制,也可以通過本公司開發的上位機控制軟件控制。
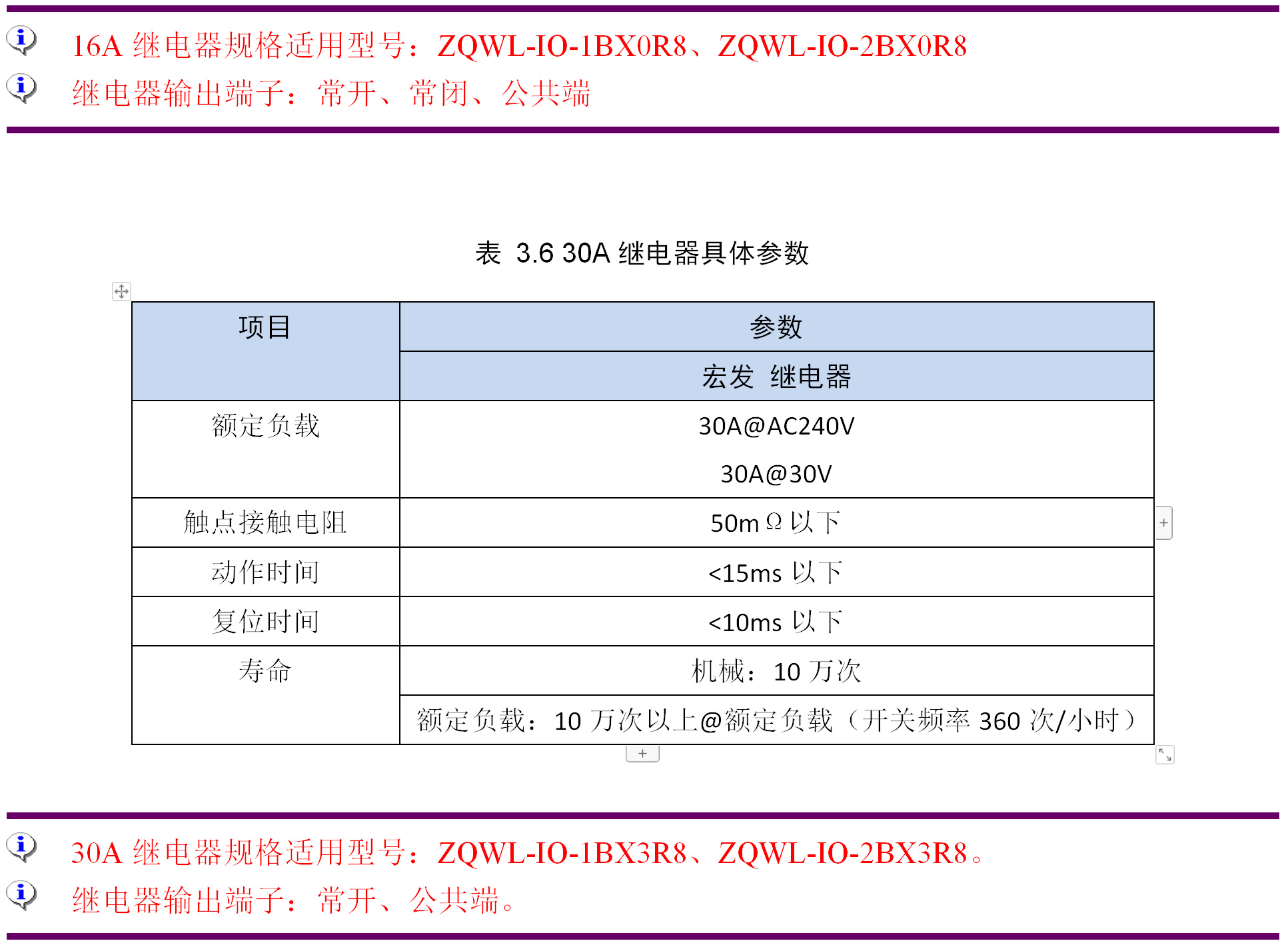
繼電器輸出負載電流從10A到30A可選,繼電器品牌可選,具體型號說明詳見表1.1所示,或直接向公司業務咨詢。
2.1功能特點
- 工業級;
- 8路DI、8路DO、1路RS485、1路RS232;
- 支持主動上報、聯動控制、延時斷開等;
- 支持脈沖計數;
- 支持通過RS485總線級聯多臺設備;
- 支持ModBus RTU協議控制;
- 支持自定義指令控制;
- 設備地址可修改;
- 豐富的LED狀態指示燈,快速定位問題;
- 支持本地升級;
- 支持二次開發,提供二次開發SDK
本節是為了方便用戶快速對該產品有個大致了解而編寫,第一次使用該產品時建議按照這個流程操作一遍,可以檢驗下產品是否有質量問題。
注意,測試前請務必檢查電源適配器是否與控制板型號相符合,如果沒有特別注明,本文檔均以ZQWL-IO-1BX1R8為例說明。
所需要的測試軟件可以到官網下載:
http://www.zhiqwl.com/
2.2硬件準備
為了測試ZQWL-IO-1BX1R8,需要以下硬件:
- ZQWL-IO-1BX1R8一個;
- DC12V 1A電源適配器一個;需要把圓頭剪開,露出紅黑兩根線。
- 串口線一個(如果不測RS232功能,可以不用);
- 串口(或USB)轉RS485接頭一個(如果不測RS485功能,可以不用);

2.3使用配置軟件控制
本公司提供有控制軟件,第一次使用時建議使用該智嵌物聯的配置軟件來控制。
控制板的出廠默認參數如表2.1所示。

1.硬件連接
用串口線(USB轉RS485/232)將電腦和設備的串口連起來,并接上電源適配器(注意,“VCC”接電源正極(紅線),“GND”接電源負極(黑線),如下圖2.2所示。
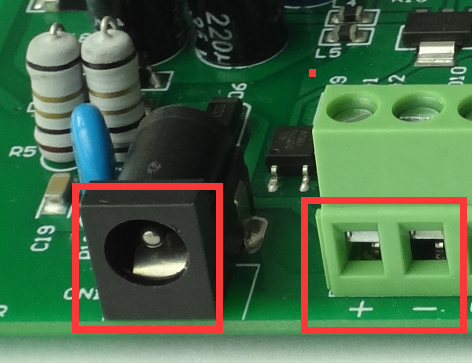
圖2.2電源接口
2.打開“智嵌物聯IO控制板控制軟件”
選擇合適的串口號,波特率選擇115200,控制板地址選“控制板1”,“通訊協議”任選一種(一共有兩種:自定義模式和Modbus協議),如圖2.3所示。然后點擊“打開串口”,打開成功后就可以和控制板通訊了。
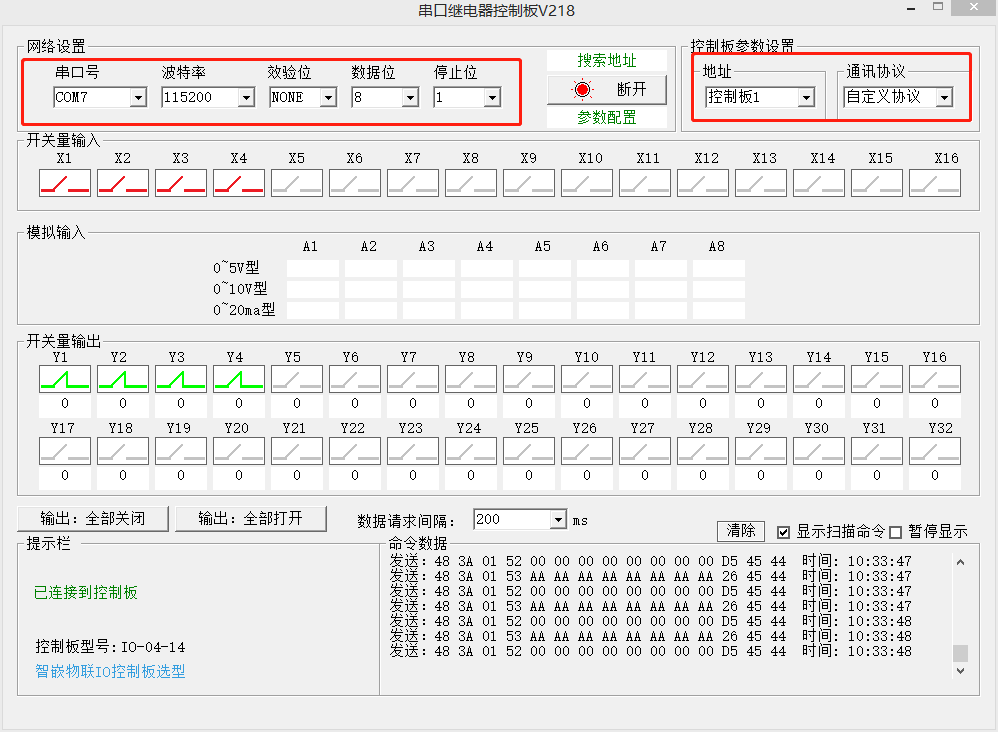
圖2.3配置軟件
說明:
開關量輸入:X1~X4即為控制板的開關量輸入狀態,紅色表示無信號,綠色表示有信號;
開關量輸出:Y1~Y4即為控制板的輸出狀態,紅色表示繼電器常開與公共端觸點斷開,綠色表示繼電器常開與公共端觸點閉合,可以通過單擊來改變狀態。
輸入輸出狀態的數據請求間隔可以設定,默認是200ms。如果將“顯示掃描命令”打勾,則會看到輸入輸出的數據請求指令發發送以及控制板的返回。
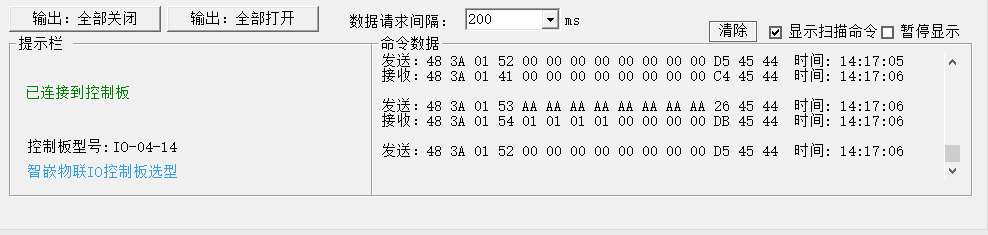
圖2.4命令顯示欄
3.調試時一般不將該選項打勾,以便手動發送的命令和返回的數據方便看到。例如,手動點“輸出:全部打開”。
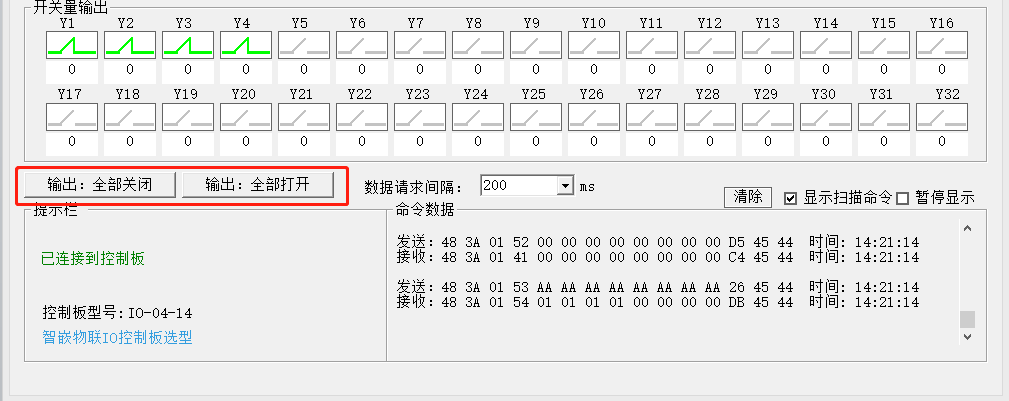
圖2.5手動控制
至此,已實現通過智嵌物聯專用的配置軟件對設備的DO、DI進行控制的目的了。
2.4使用串口調試助手控制
打開串口調試助手,并設置相應的串口號,波特率選擇115200,并將要發送的命令碼填到發送區(一定要選中“按十六進制發送”), 有關詳細控制命令請參考本文檔的第7章。
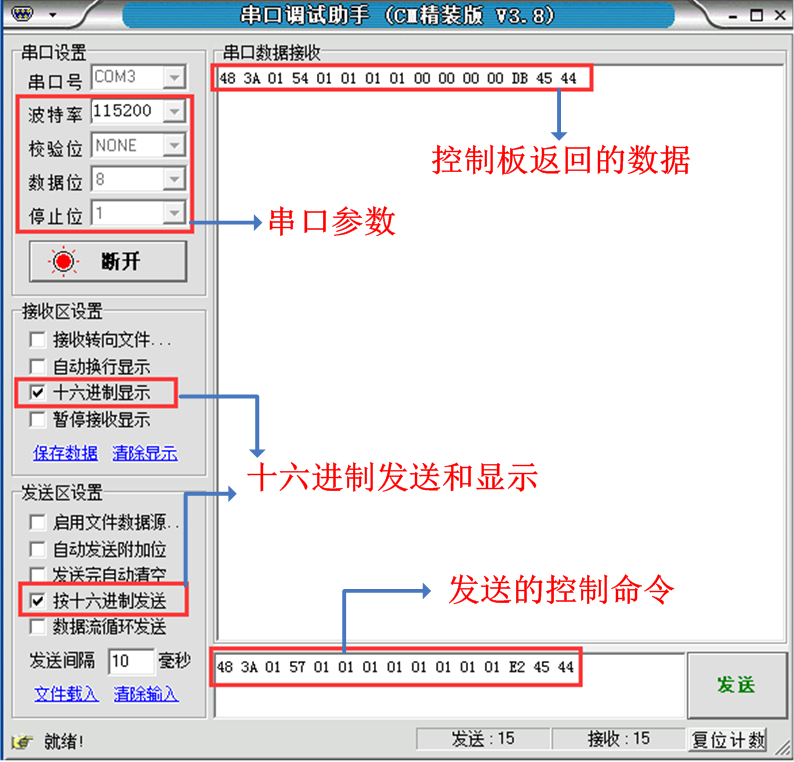
圖2.6串口調試助手發送控制指令
2.5使用Modbus poll軟件工具控制
本控制板兼容標準的Modbus RTU協議,可以通過該協議來與其他Modbus RTU設備或軟件通訊。本測試使用“Modbus poll”軟件作為控制軟件(該軟件的安裝過程這里不做介紹)。
控制板默認地址為1,波特率為115200/9600。
(1)讀取寄存器地址從0x0000到0x000e的15個寄存器的值,這些寄存器的含義詳見7.2小節。
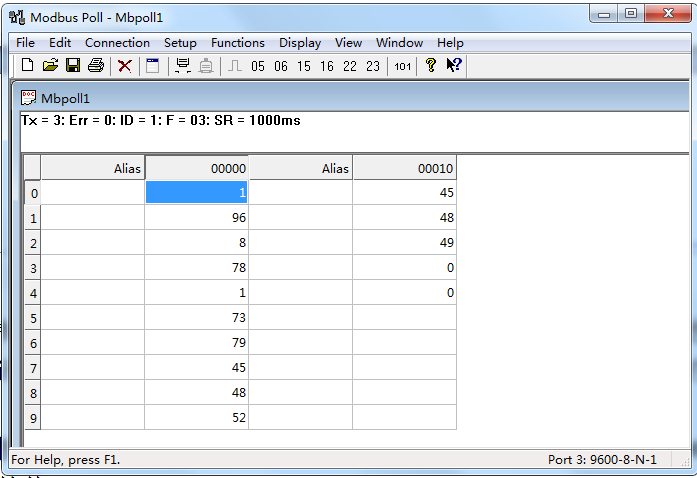
圖2.7Modbus poll讀設備信息
(2)控制一路繼電器輸出
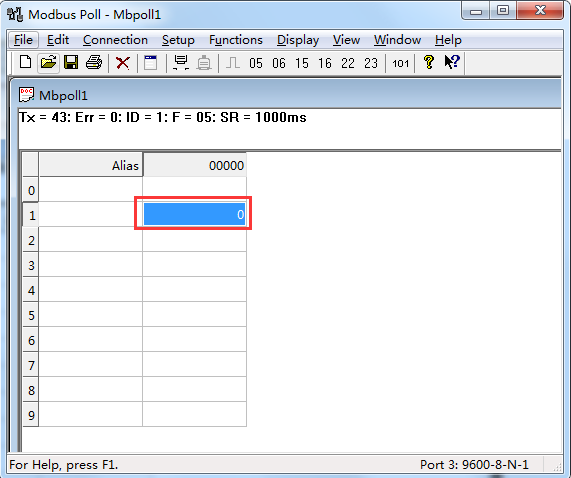
圖2.8Modbus poll控制繼電器
上圖中紅色框即為繼電器的狀態:0表示繼電器常開與公共端觸點斷開,1表示繼電器常開與公共端觸點閉合,可以用鼠標選中該方框,再按一下空格鍵來改變狀態:
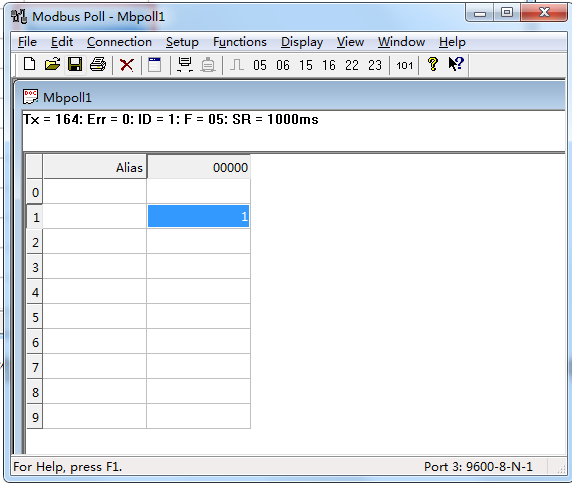
圖2.9Modbus poll控制繼電器
通過該軟件也可以讀取輸入狀態,這里不再列舉。
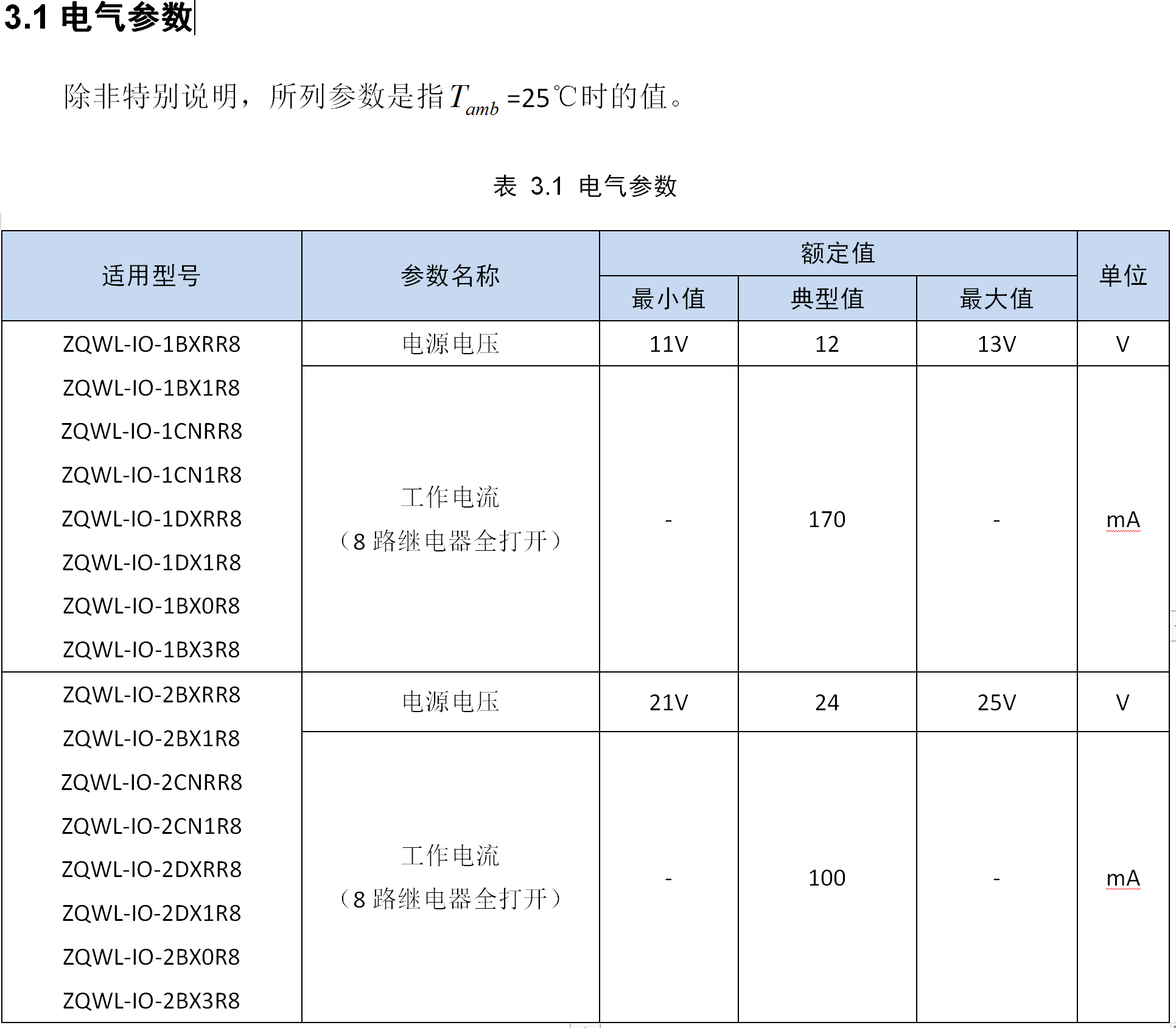
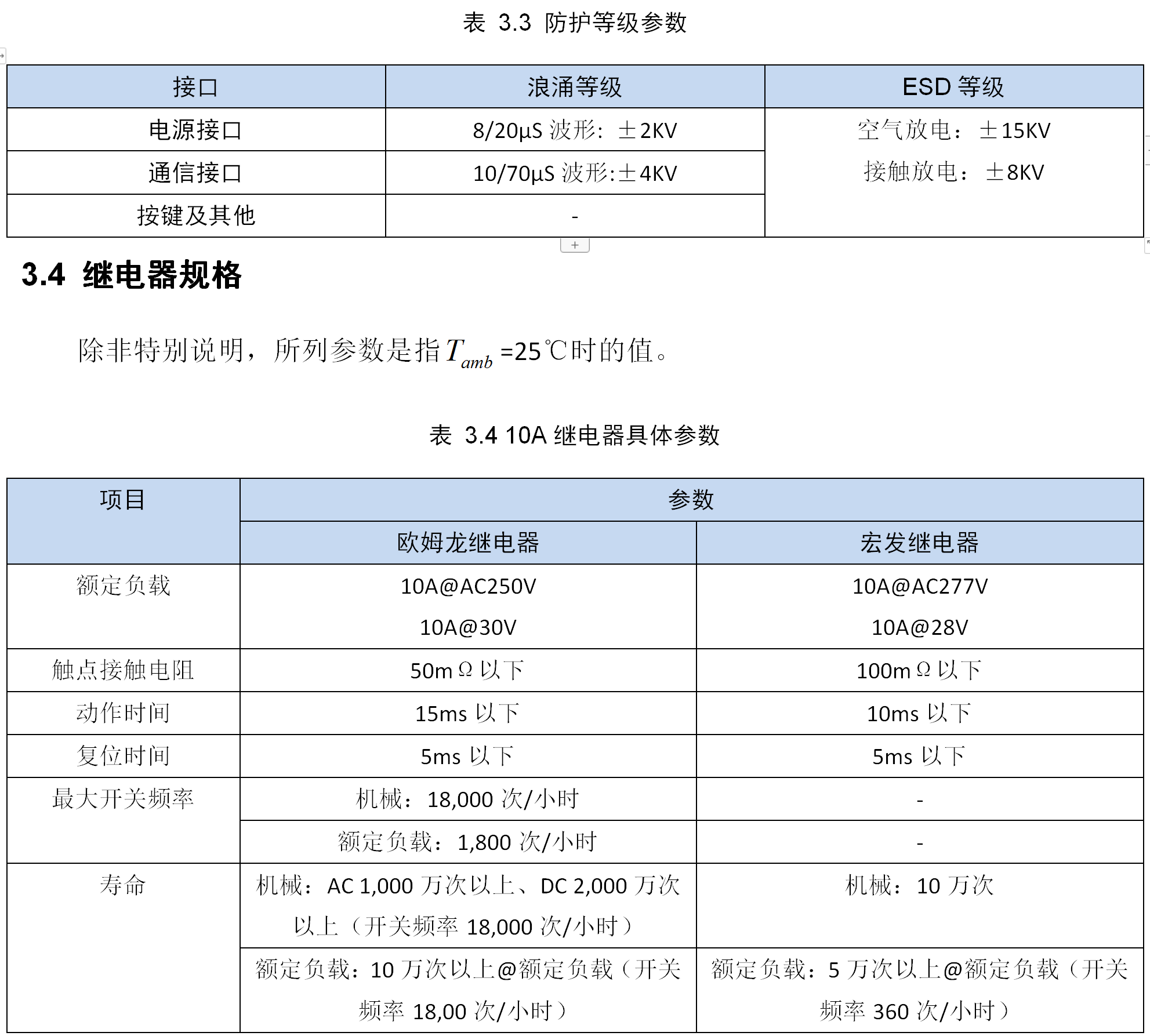
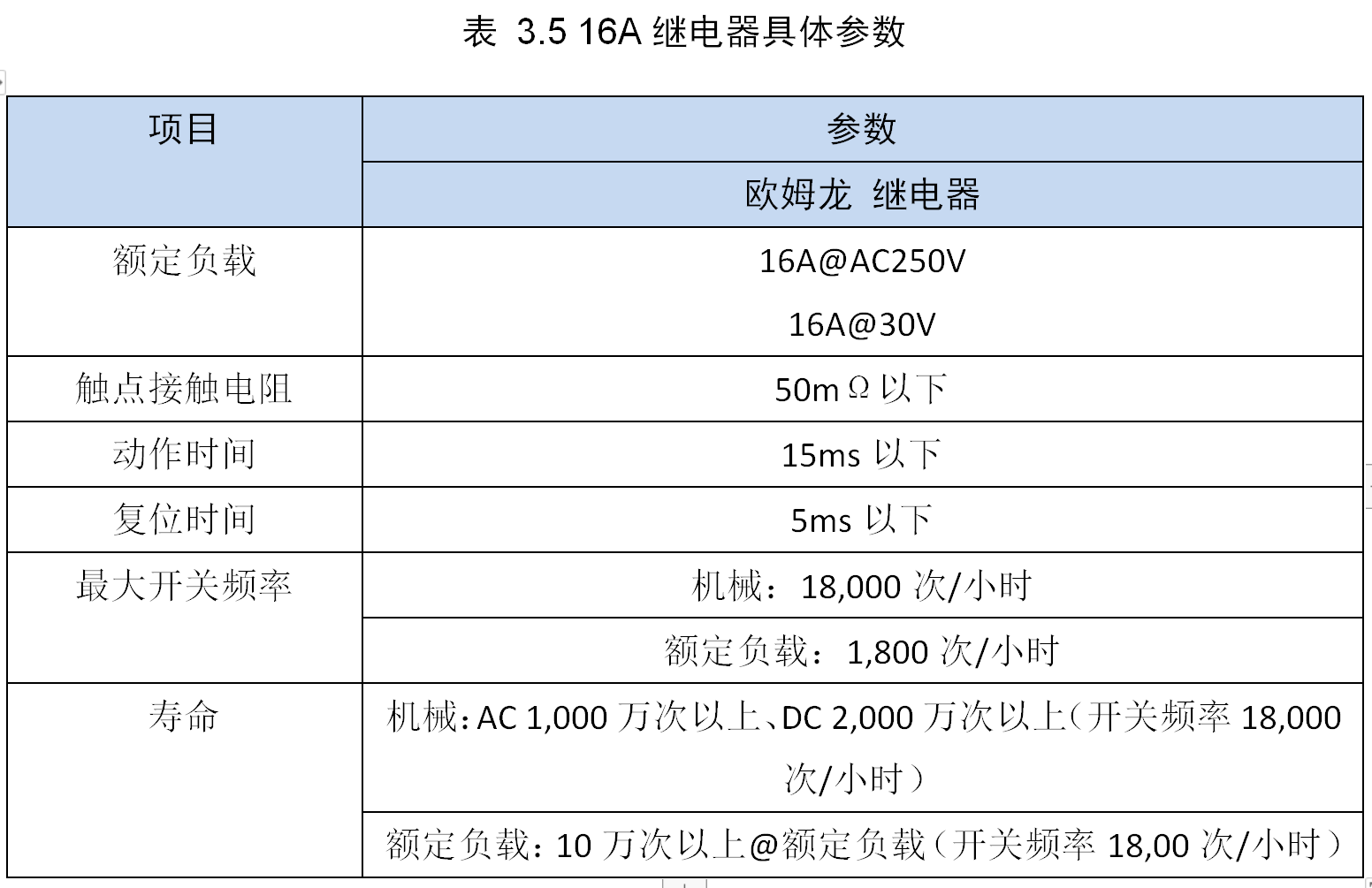
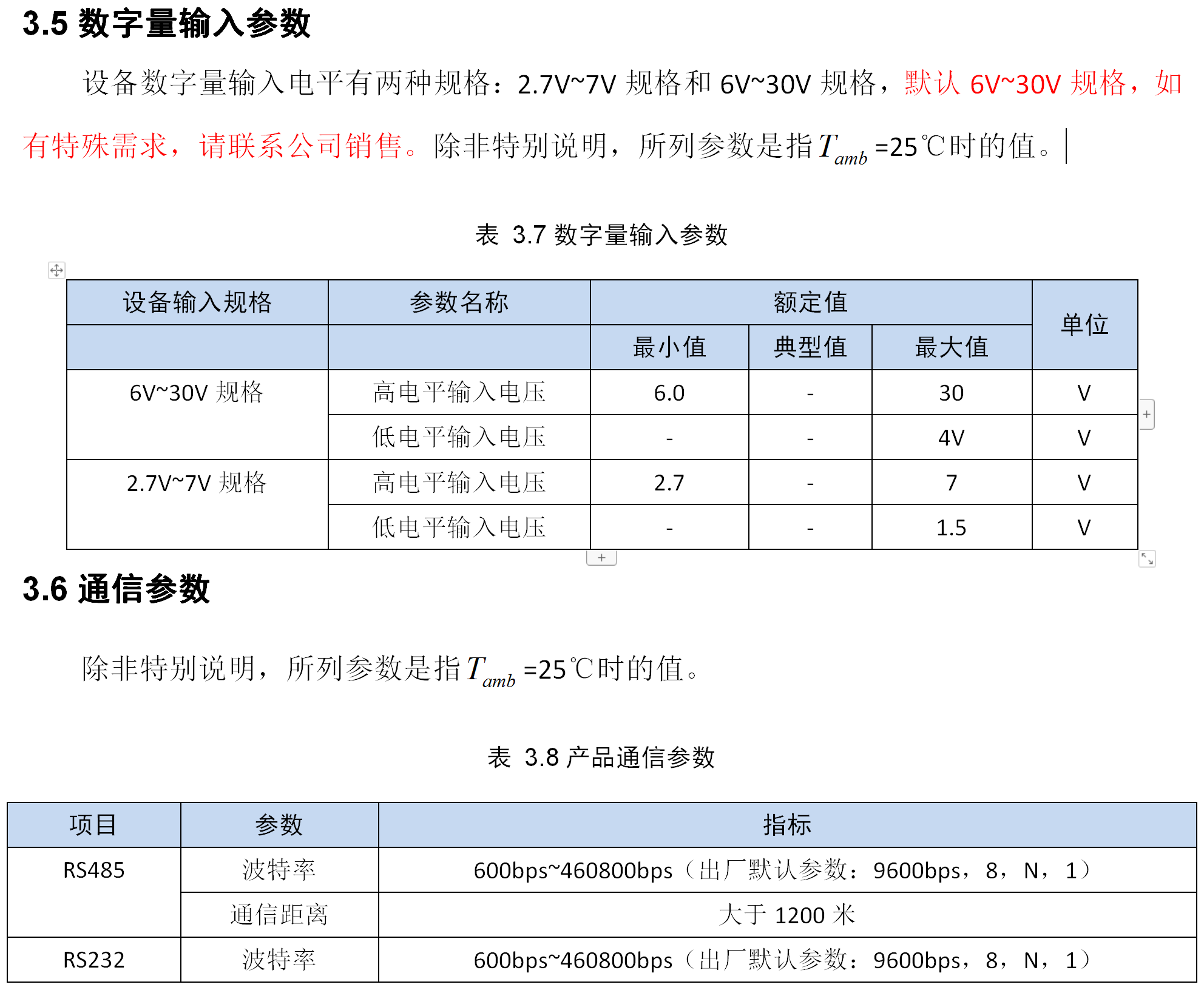
三、產品規格
本小節除特別說明,所列參數均適用表3.1所示的型號。
四、硬件接口及機械尺寸
4.1產品接口布局
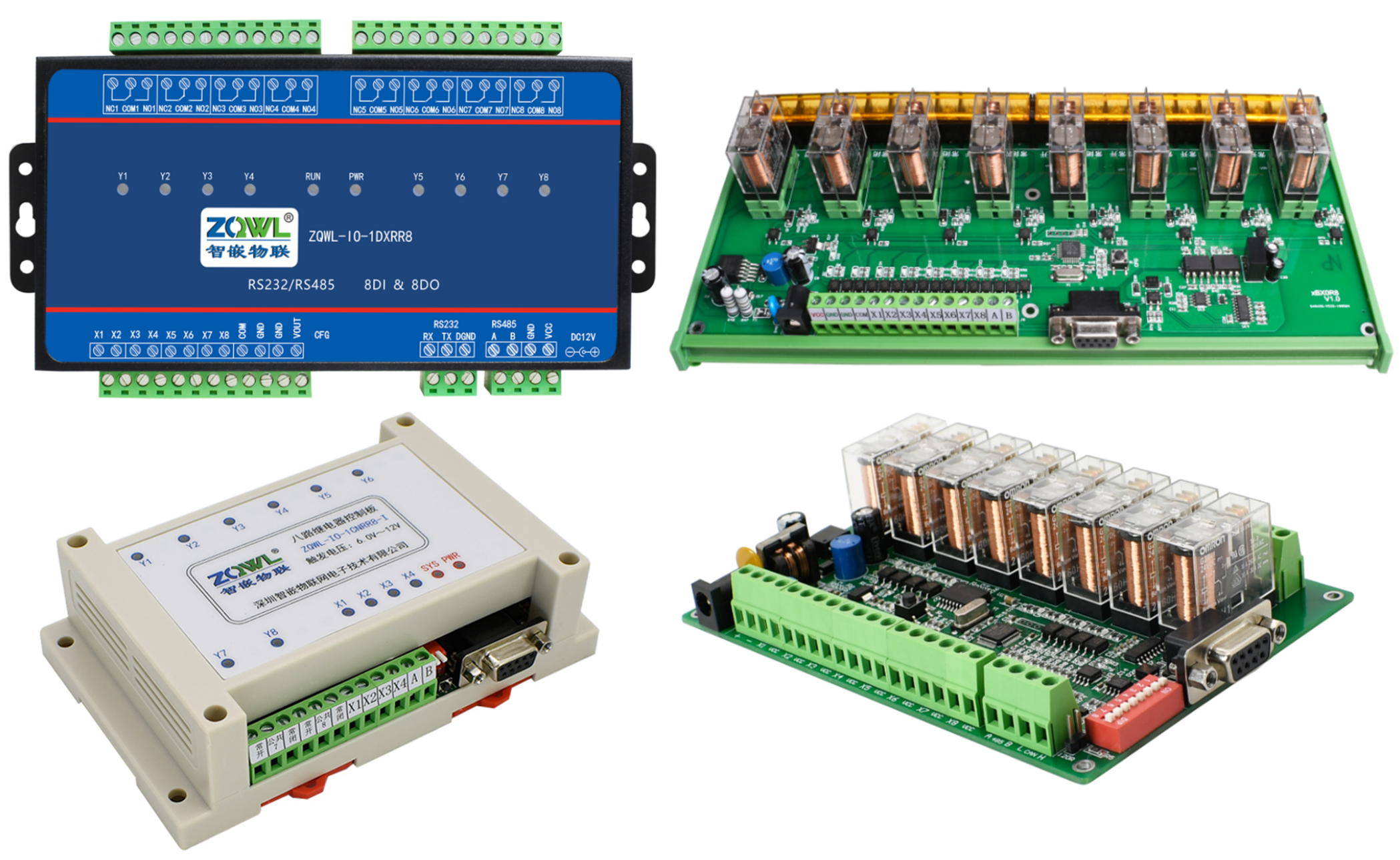
1.1.1ZQWL-IO-1BXRR8、ZQWL-IO-2BXRR8接口布局
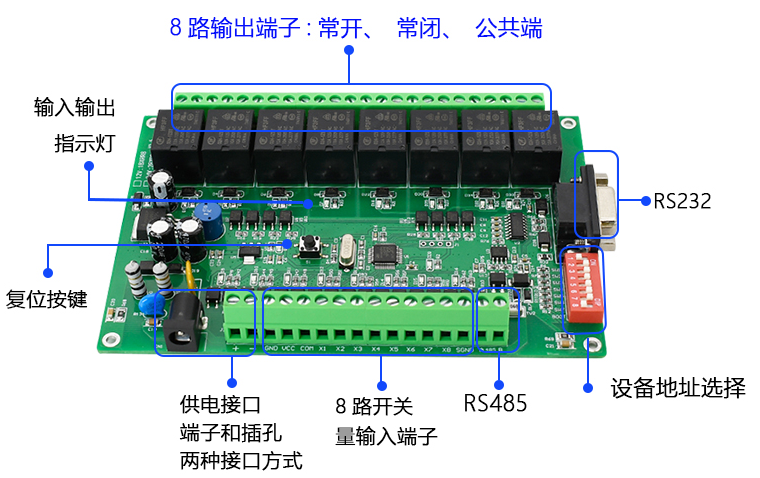
圖4.1設備的接口布局1
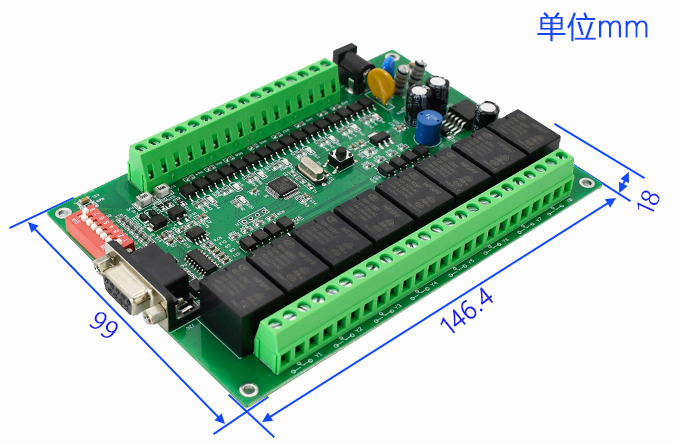
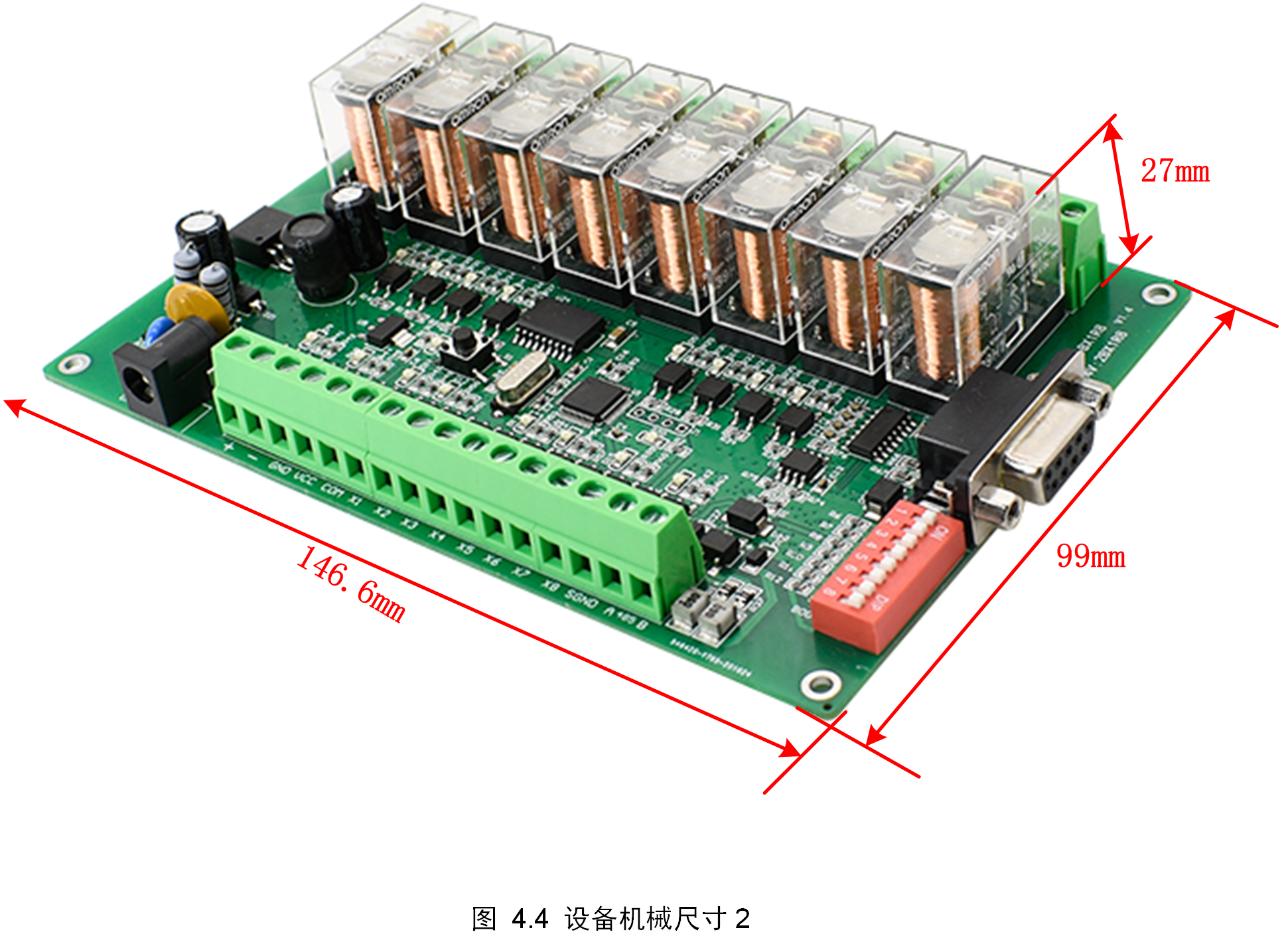
圖4.2設備機械尺寸1
4.1.2ZQWL-IO-1BX1R8、ZQWL-IO-2BX1R8接口布局
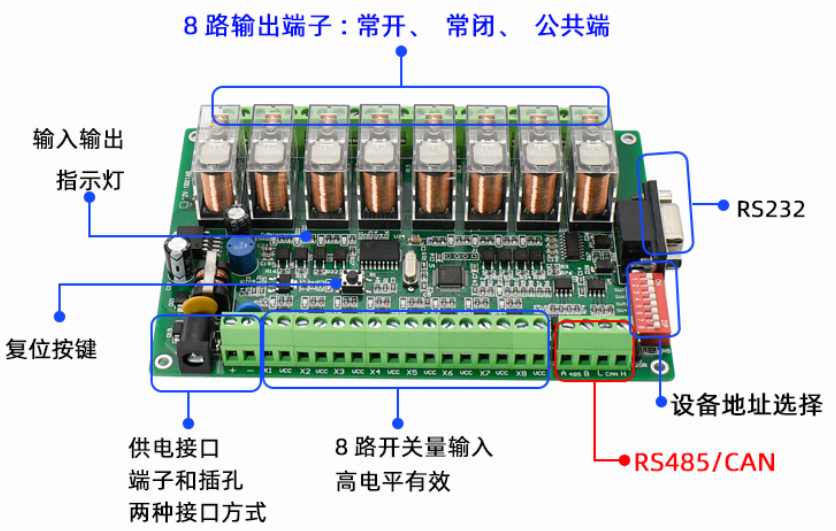
圖4.3設備的接口布局2
4.1.3ZQWL-IO-1CNRR8、ZQWL-IO-2CNRR8接口布局
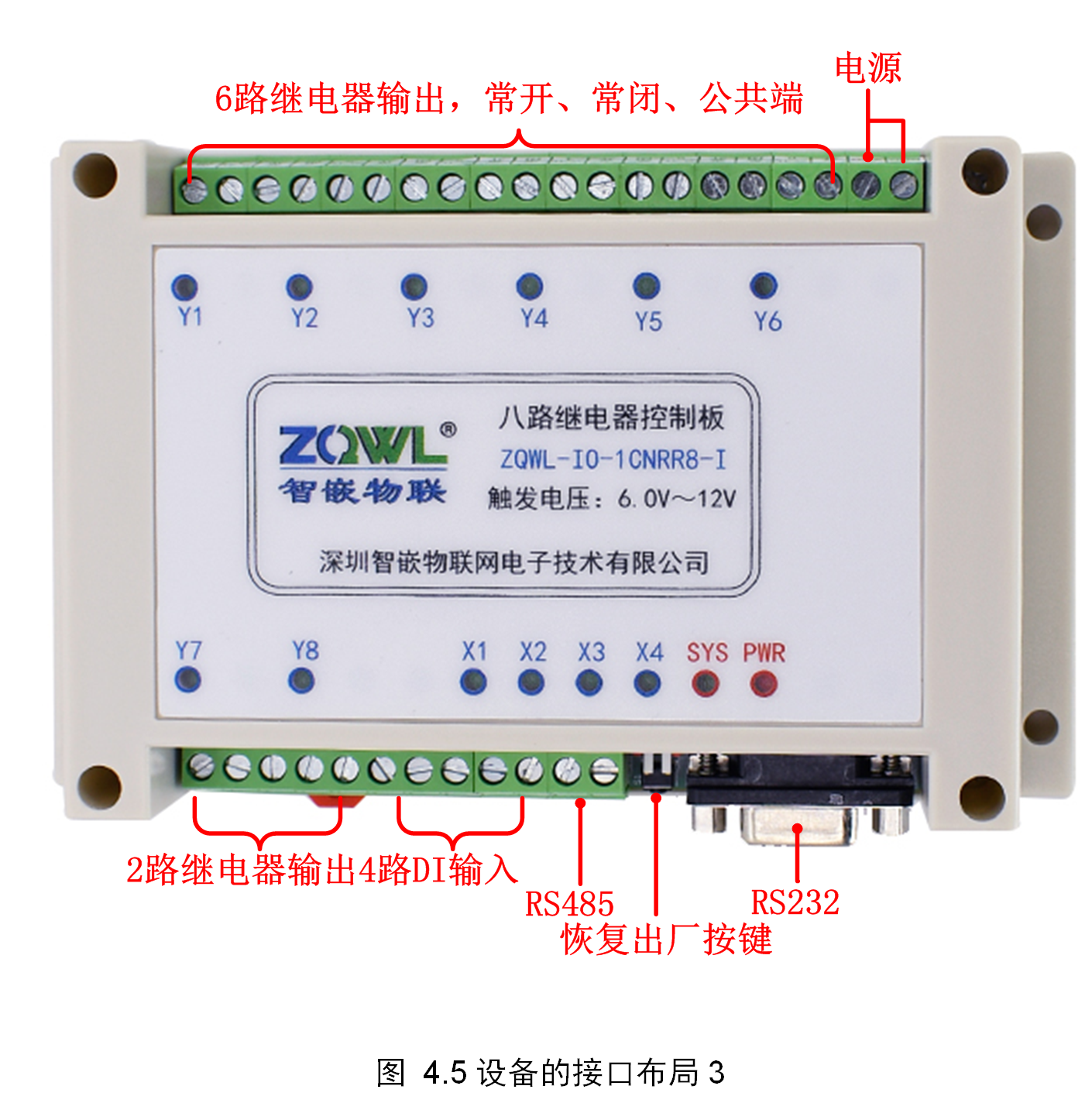
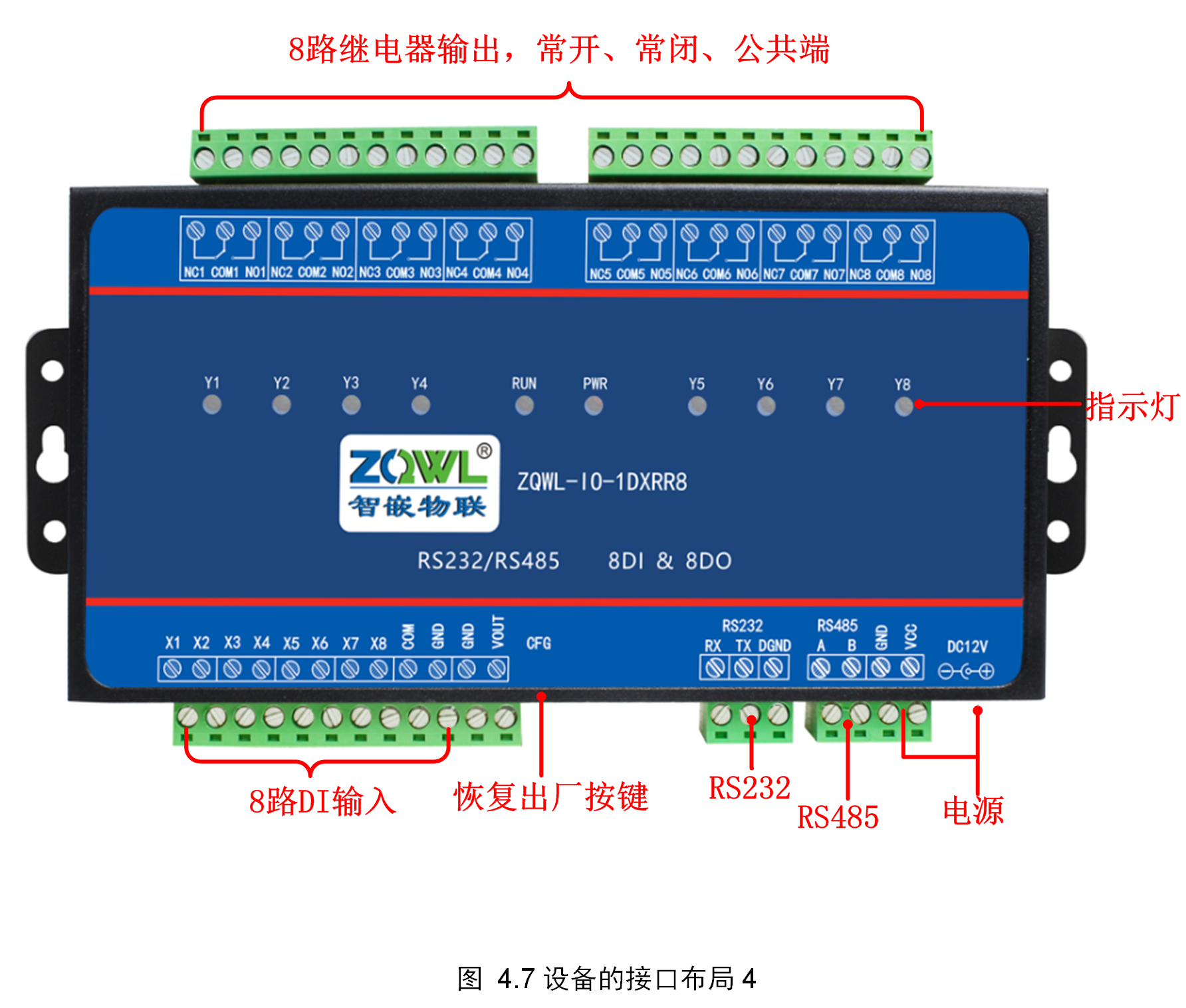
4.4.4ZQWL-IO-1DXRR8、ZQWL-IO-2DXRR8接口布局
4.1.5ZQWL-IO-1BX0R8、ZQWL-IO-2BX0R8接口布局
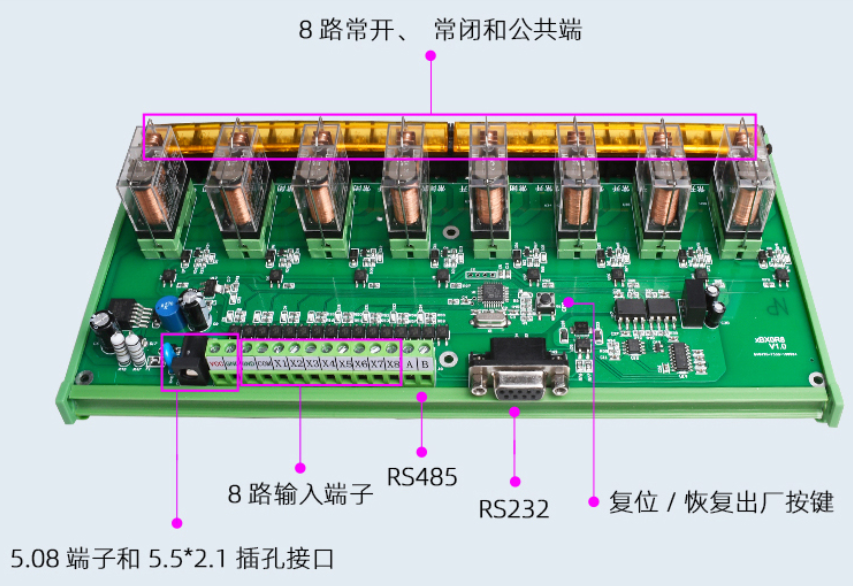
圖4.9設備的接口布局5
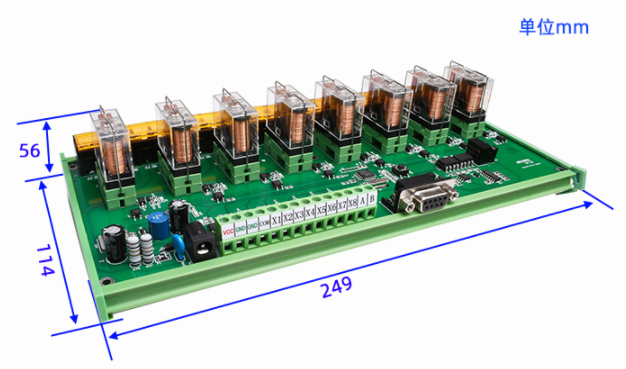
圖4.10設備機械尺寸5
4.1.6ZQWL-IO-1BX3R8、ZQWL-IO-2BX3R8接口布局
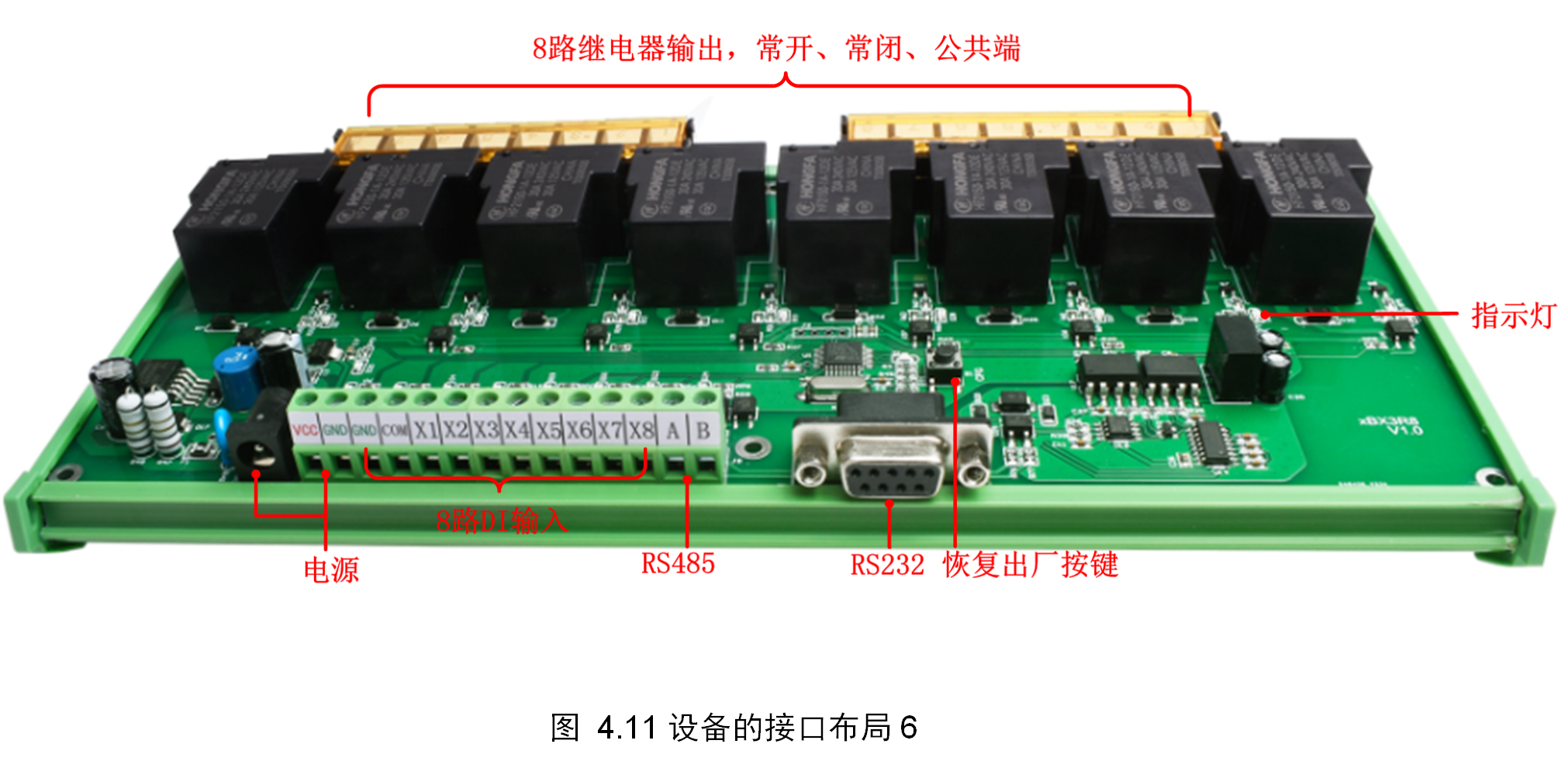
4.1.7設備開關量輸入
本控制板共有8個開關量輸入,支持干節點、濕節點、NPN、PNP的接線方法,部分型號的DI輸入只支持高電平有效,具體型號詳見表1.1所示。
1.PNP輸入接線
PNP型輸入時,公共端“COM”為信號“地”(即共陰極,共負極),X1~X4輸入高電平時,有信號,邏輯示意圖如圖4.13所示(以X1為例)。
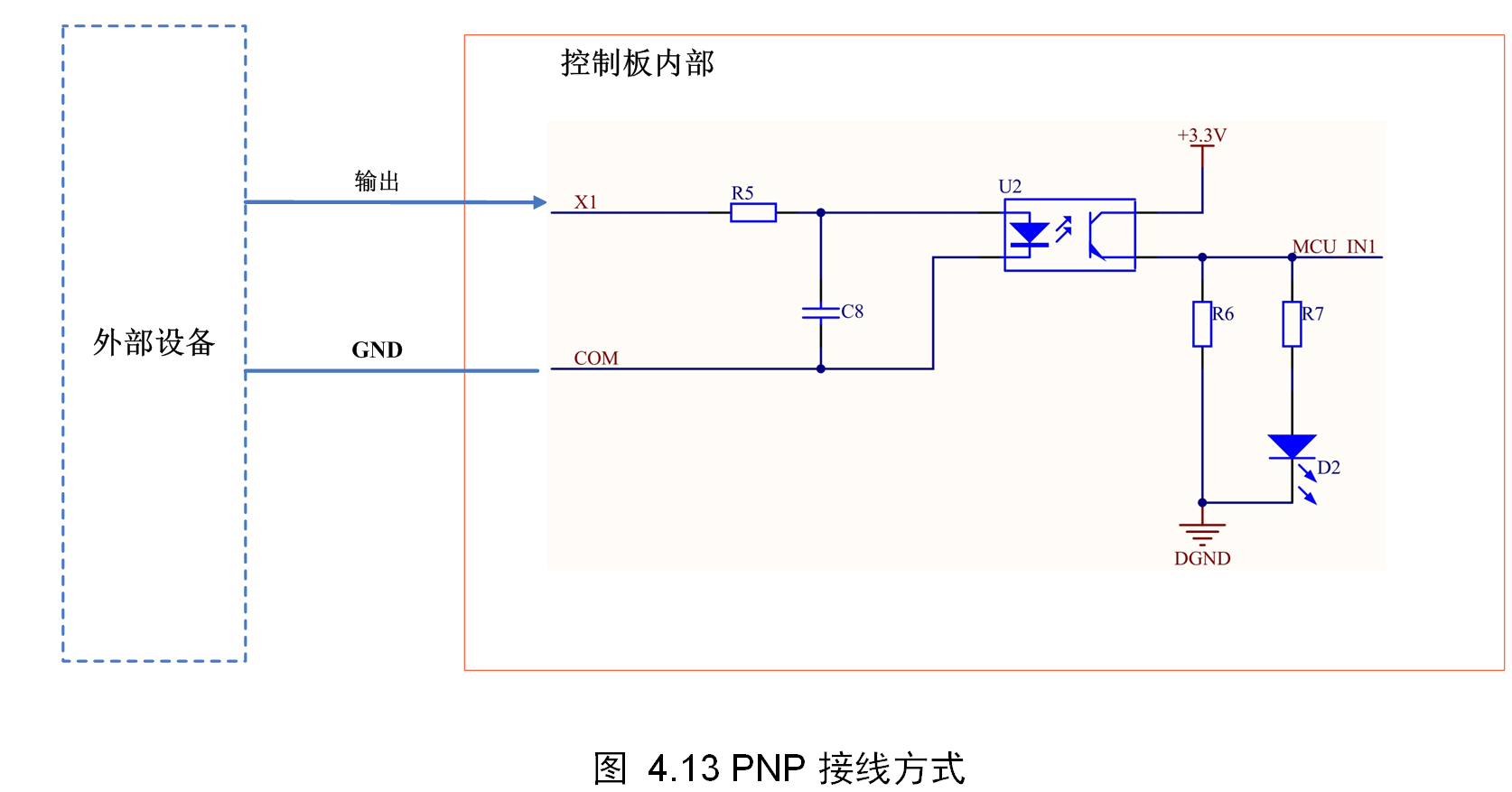
例如,COM接GND上,X1接到VCC上,則第一路輸入有信號。
2.NPN輸入接線
NPN型輸入時,公共端“COM”接VCC(即共陽極,共正極),X1~X4輸入低電平時,有信號,邏輯示意圖如圖4.14所示(以X1為例)。
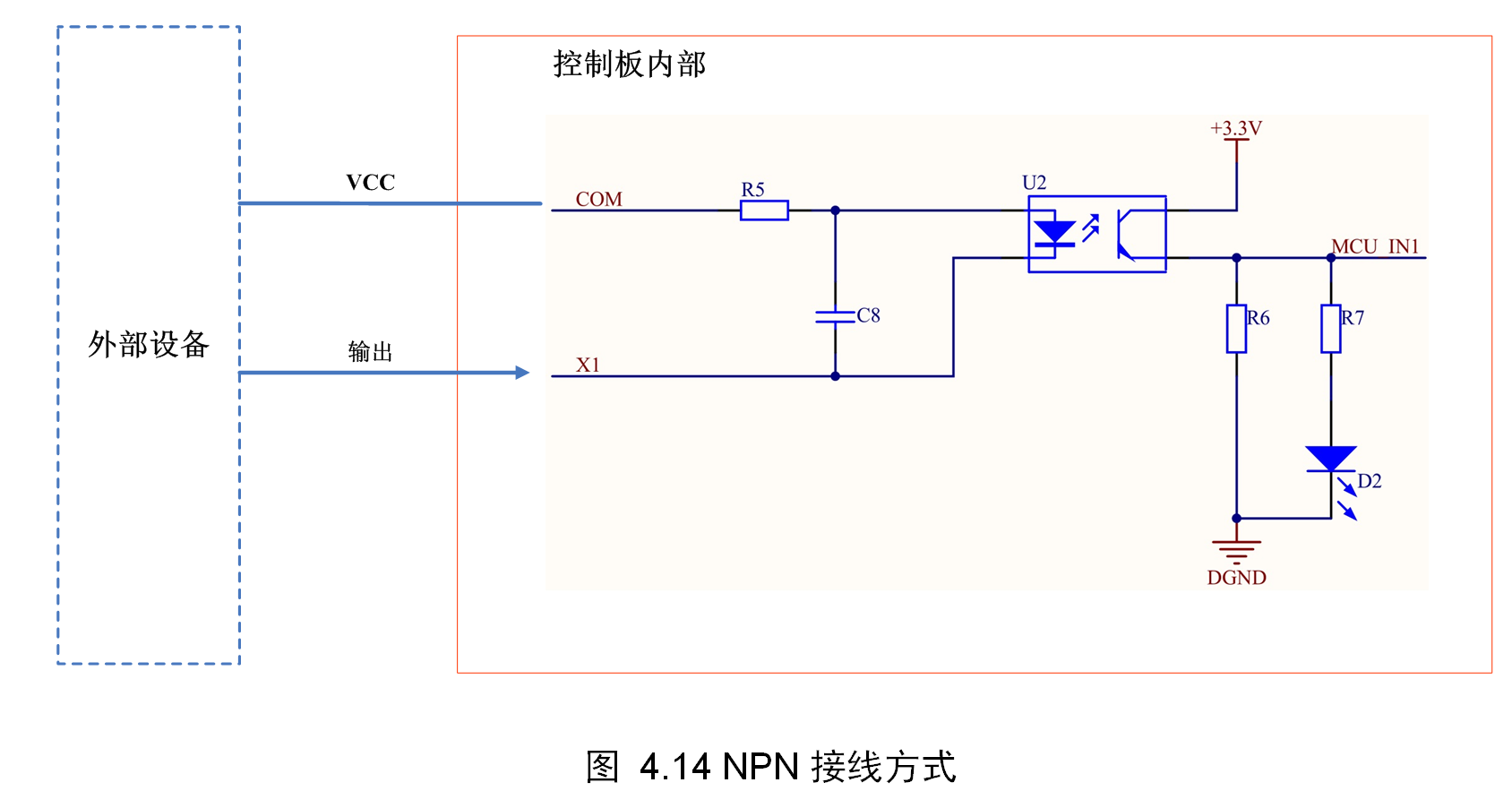
例如,COM接VCC上,X1接到GND上,則第一路輸入有信號。
3.干節點接線
若用戶需要檢測的是無源開關信號,可以使用干節點的接線方式。
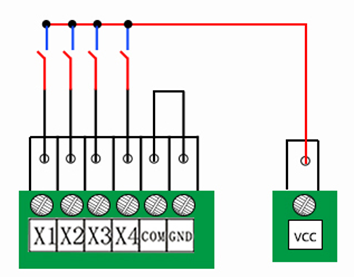
圖4.15干節點接法
4.濕節點接線方式
若用戶需要檢測有源的開關信號,可以采用濕節點的接線方式。
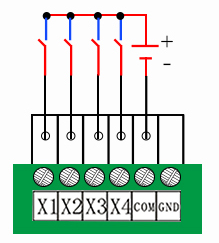
圖4.16濕節點接法
4.2設備繼電器輸出接線
該設備共有8路繼電器輸出,每路都有常開、常閉和公共端三個觸點,每路繼電器的公共端觸點互相獨立,8路可以分別控制不同的電壓,每個端子均有標示。接線圖詳見《智嵌物聯IO控制器接線說明》。
4.3撥碼開關
設備的地址可通過撥碼開關設置,適用型號:ZQWL-IO-1BXRR8、ZQWL-IO-1BX1R8、ZQWL-IO-1BXRR8、ZQWL-IO-1BX1R8。其他型號的設備地址可通過配置軟件進行配置。
設備有一個8位撥碼開關,如圖4.17所示。
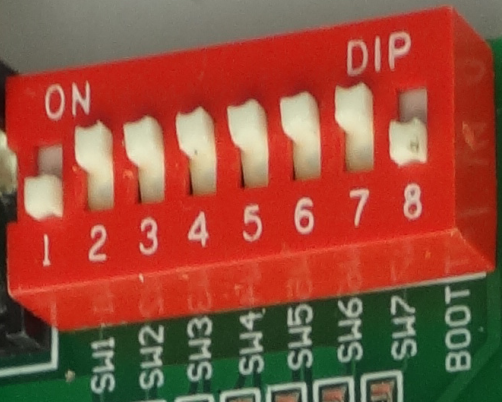
圖4.17撥碼開關
撥碼開關的第8位(“BOOT”)是程序更新設置位,正常工作時該位撥到“OFF”。
撥碼開關的第1~7(對應板子絲印SW1~SW7)為地址選擇位,二進制表示。撥到“ON”時該位取“0”,反之該位取“1”。
如圖4.17對應撥碼開關值為:
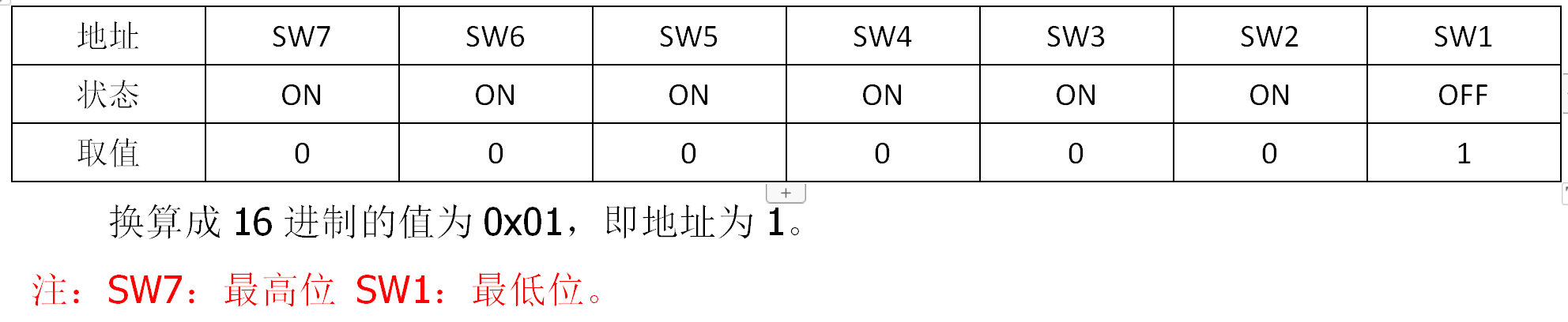
舉例:

即十六進制為0x02。
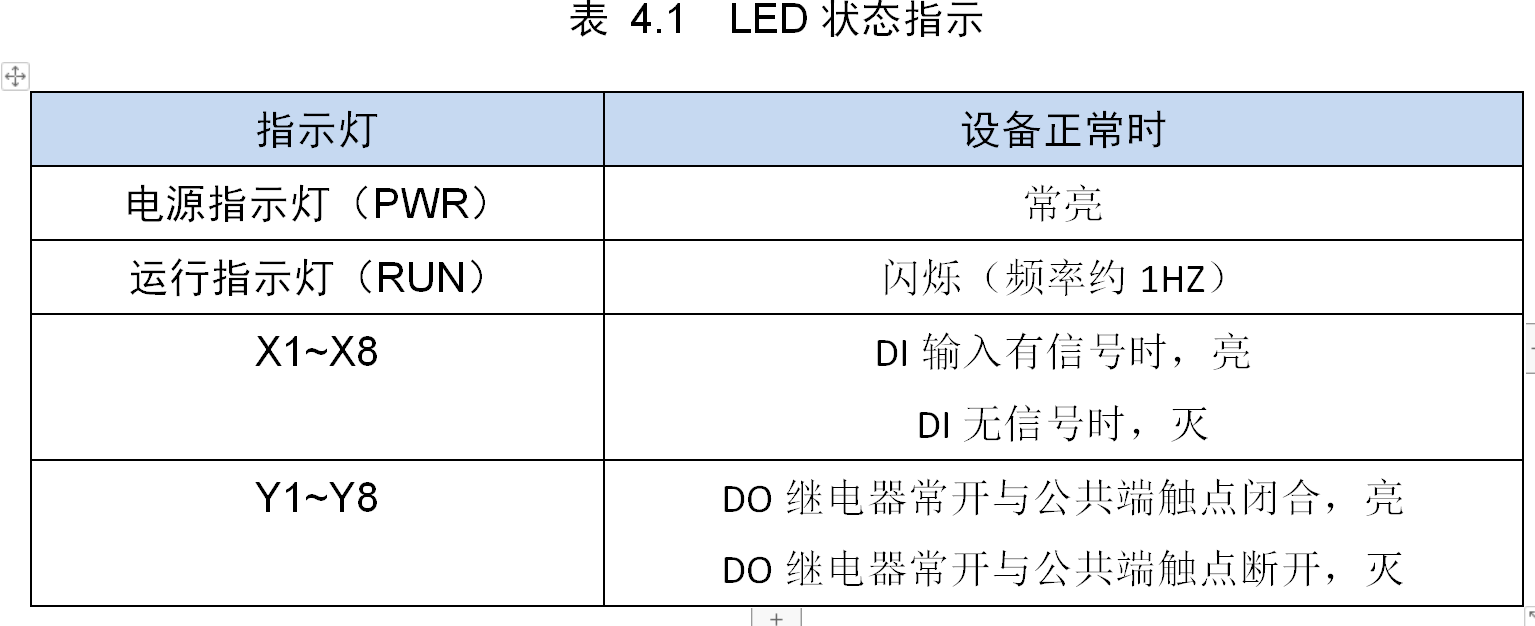
4.4指示燈
五、模塊參數配置
本模塊可以通過“智嵌串口IO控制板配置軟件”進行參數的配置。注意,模塊只有重啟后,新設置的參數才生效。
5.1智嵌串口IO配置軟件
可以通過配置軟件對模塊的參數配置,可以配置的參數:設備的地址、串口參數、使能主動上報、使能聯動控制等。
使用方法如下:
1.將模塊通過串口線(USB轉RS232或USB轉RS485)和電腦連接,并給模塊上電,SYS燈閃爍(約1Hz)表示模塊啟動正常。
2.打開配置軟件并配置參數
打開配置軟件,點擊參數配置,進入設備參數配置界面。
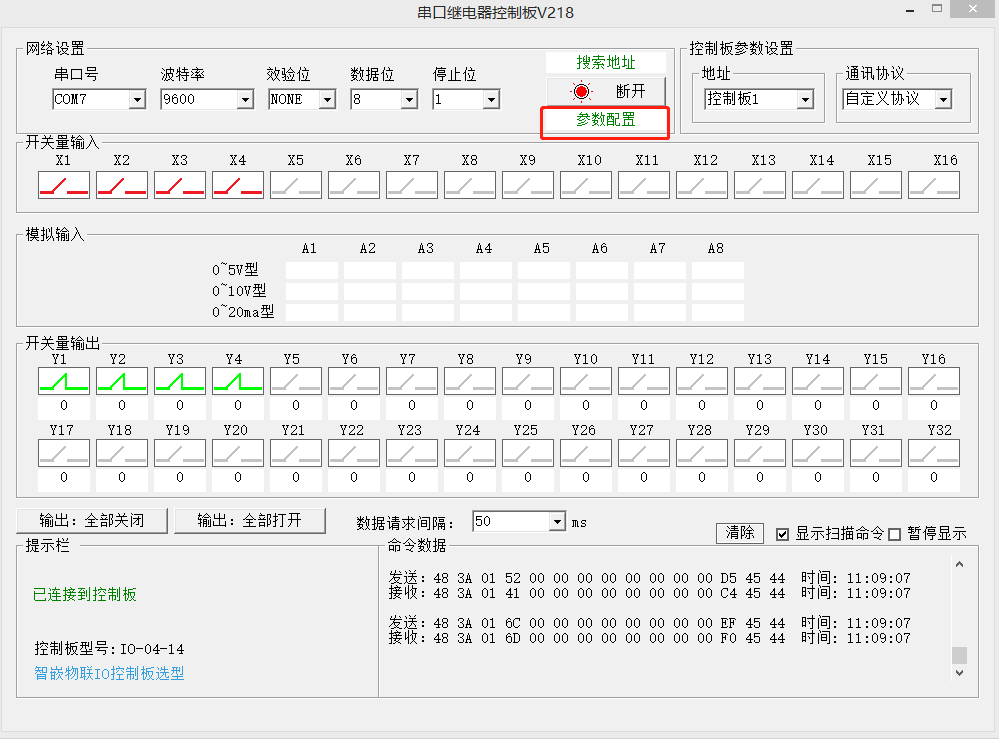
圖5.1配置軟件
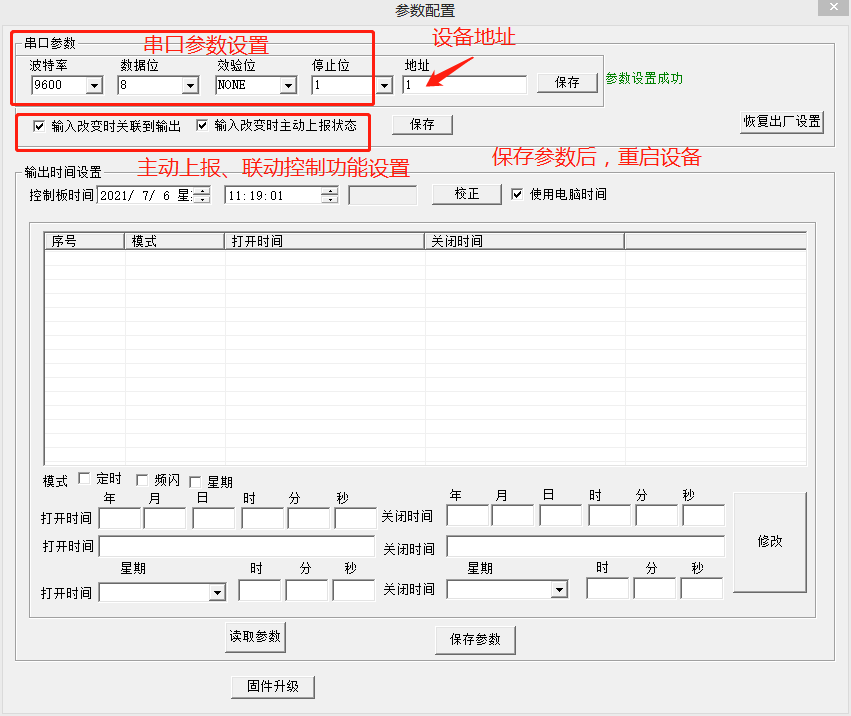
圖5.2配置界面
3.保存參數后,重啟設備,新參數方可生效。
六、設備的高級功能
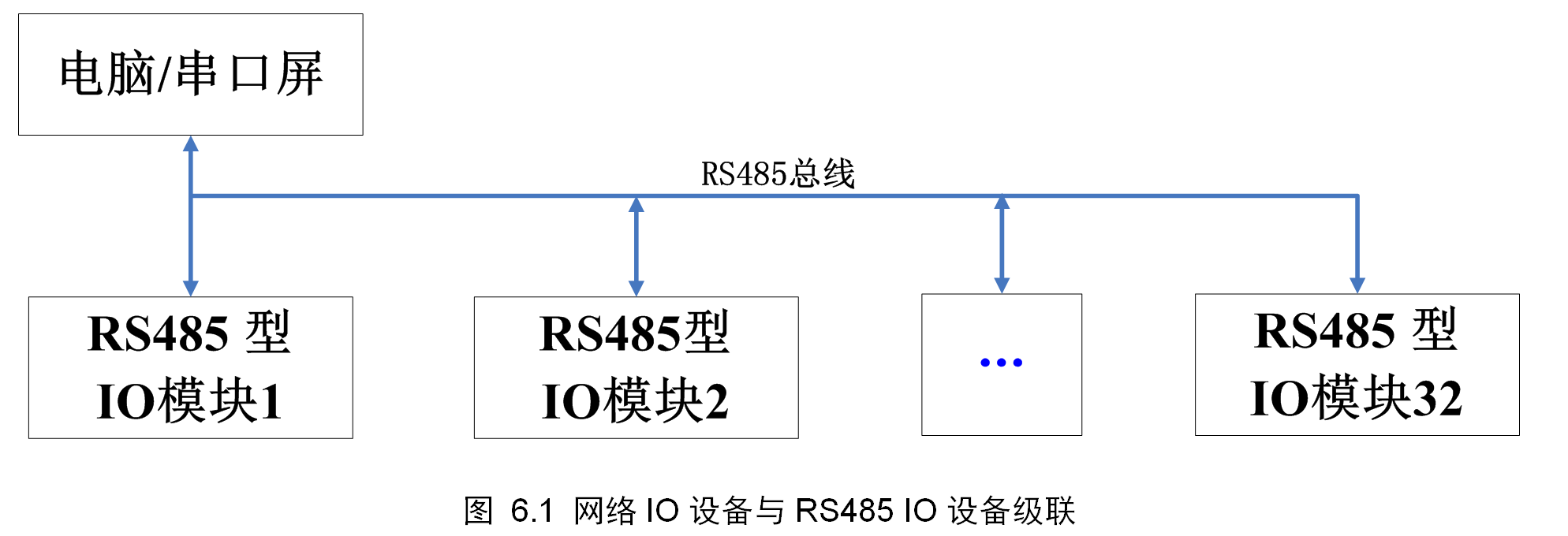
6.1設備級聯控制
該模塊有1路RS485接口和1個RS232接口。可通過RS485接口實現與智嵌RS485型IO設備的級聯,至少可級聯32個,其拓撲結構如圖6.1所示。
6.2設備DI輸入狀態自動上報
當DI輸入狀態變化時,設備會將DI狀態主動上報,設備默認不開啟該功能,須通過配置軟件使能“自動上報功能”,如圖6.2所示。保存設置后,須重啟設備,參數方可生效。
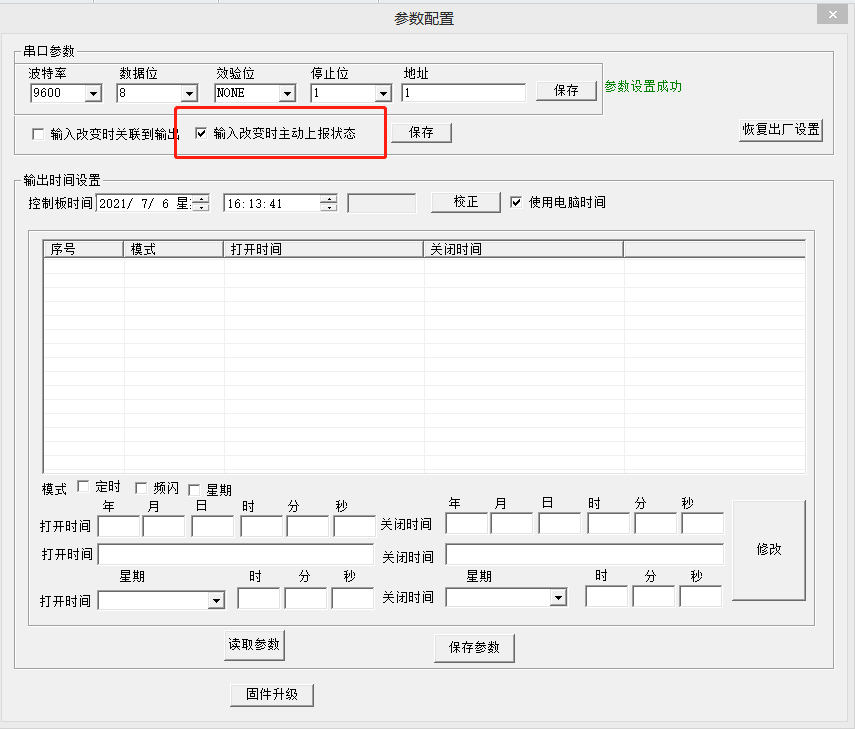
圖6.2使能自動上報
6.3設備DI輸入與DO輸出聯動
DI輸入聯動DO輸出功能:當DI輸入有信號時,對應的DO繼電器會做出對應的動作。
設備默認不開啟該功能,須通過配置軟件使能“關聯到輸出”,如圖6.3所示。保存設置后,須重啟設備,參數方可生效。
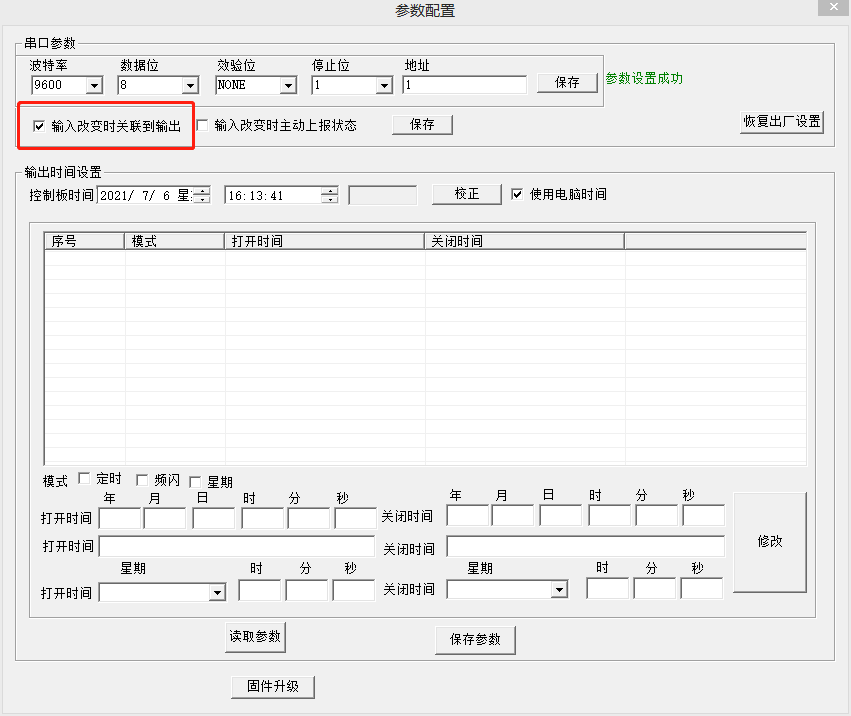
圖6.3使能DI聯動DO功能
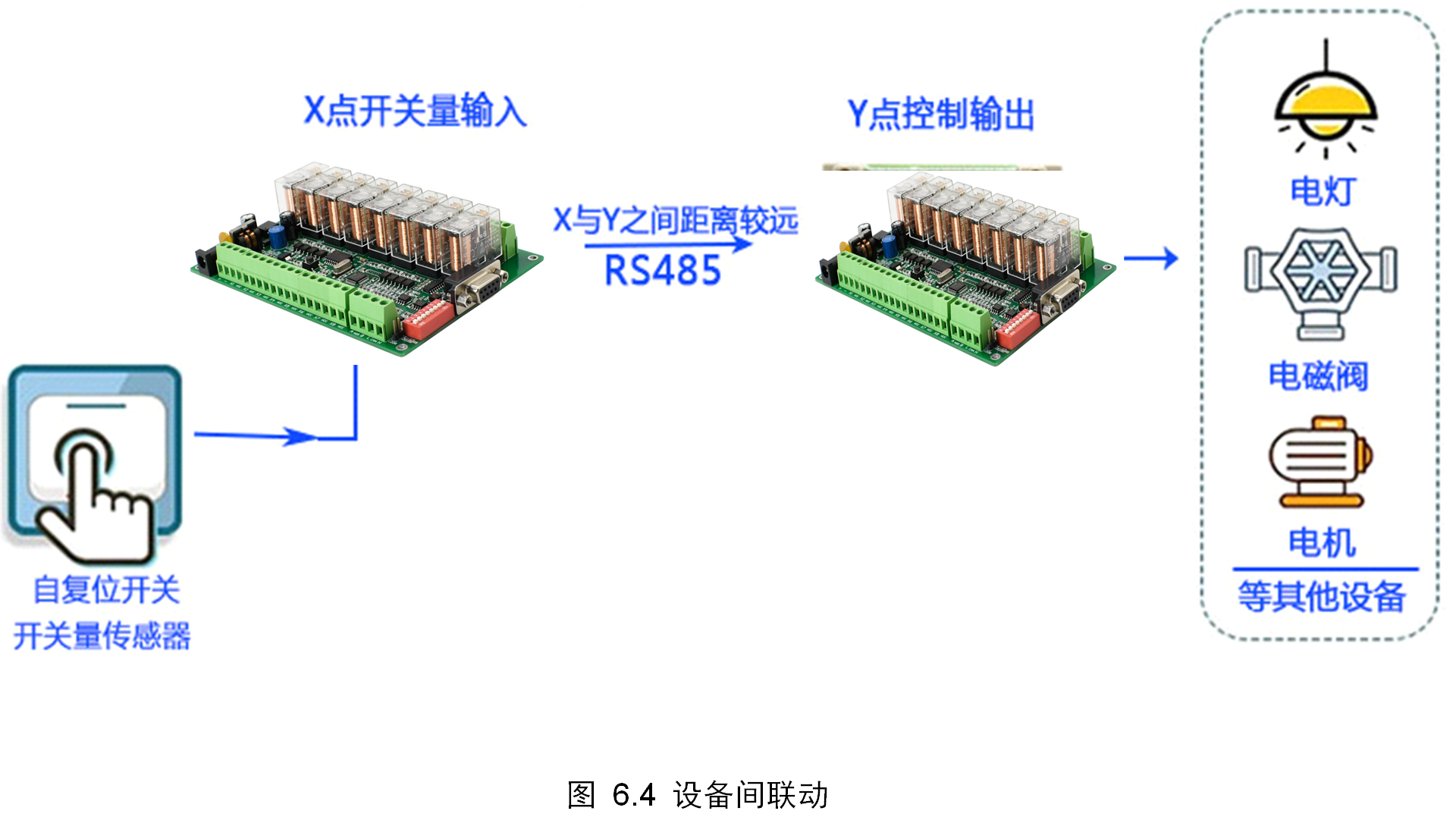
6.4設備與設備之間聯動
兩臺設備之間通過簡單的配置即可實現設備間聯動,即設備A的DI輸入信號可以控制設備B的DO繼電器輸出。
6.5延時斷開控制
設備收到延時斷開指令后,將對應的DO繼電器常開觸點與公共端觸點閉合,并會返回控制板繼電器狀態,然后開始計時,到達用戶設置的延時時間之后之后,將設備會將對應的繼電器常開觸點與公共端觸點斷開。
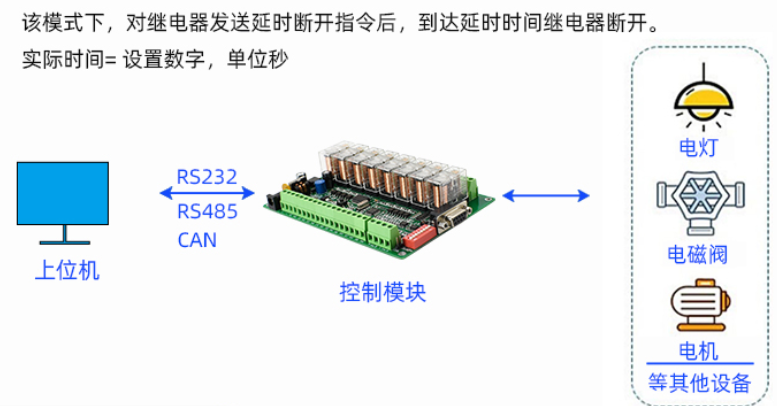
圖6.5延時斷開控制
6.6脫機定時控制
本節內容適用產品型號:ZQWL-IO-1DXRR8、ZQWL-IO-2DXRR8。
模塊內置高精度RTC時鐘芯片,誤差±10秒/月,具有一定的時間管理功能,如定時控制、延時控制以及閃爍等。該部分功能需要使用配置軟件將控制邏輯寫到控制板后,控制板即可根據所配參數脫機運行。
每路輸出都具有3種時間控制模式:頻閃、定時和星期。頻閃模式是按照一定頻率(周期)閃爍(開關);定時模式是指按照日期(年月日時分秒)進行開關控制;星期模式是按照以星期為周期進行控制。
6.6.1頻閃模式
這是一種最簡單的控制模式(出廠默認),可以實現將輸出按照一定頻率(周期)打開和關閉。打開時間(記為T1)和關閉時間(記為T2)可以通過配置軟件設置。
打開配置軟件,設置好串口參數(串口號、波特率、檢驗位、數據位等)和控制板地址(默認為1),打開串口后,有“參數配置”按鈕出現:

點擊“參數配置”按鈕,即可實現對控制板參數配置(如串口參數、控制板地址和控制板時間等),這里重點介紹“輸出時間設置”。
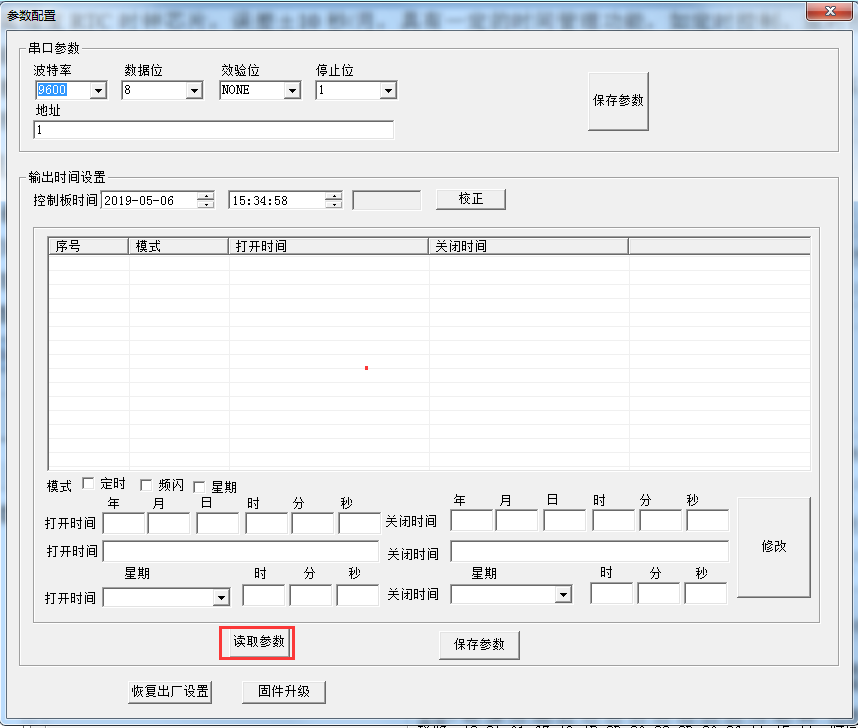
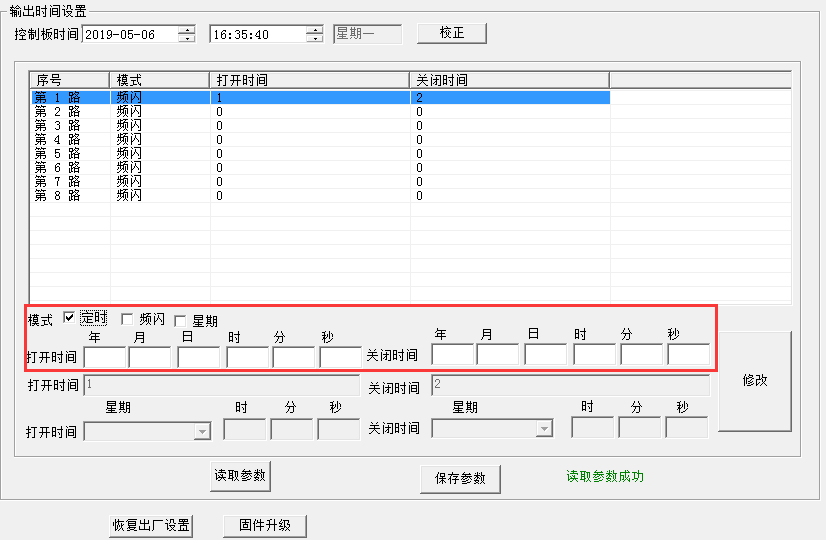
點上圖中的“讀取參數”,讀取成功后,每路輸出的時間控制屬性都有顯示(出廠默認為頻閃模式,T1和T2時間都為0):
每路輸出的時間控制屬性都有顯示(出廠默認為頻閃模式,T1和T2時間都為0)。
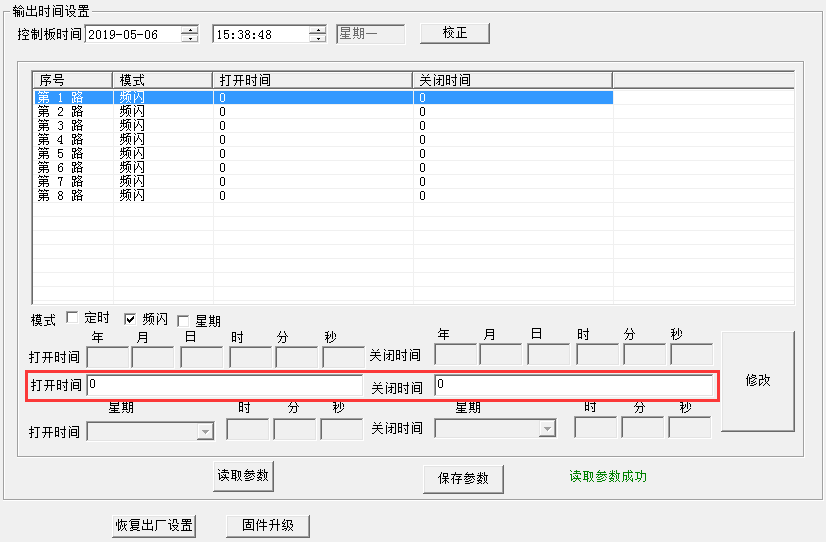
在搜索軟件的右側界面選中該控制板的某個輸出,如選中第一路輸出:
如上圖,用鼠標選中第1路,參數即顯示在下面的輸入框中,這時就可以修改了。
上圖紅色框中的“打開時間”和“關閉時間”單位是秒,取值范圍0到65535。模式選項一行,“頻閃”打勾。
出廠默認打開時間T1為0,關閉時間T2為0,即該路什么都不執行(相當于時間控制無效,只能通過指令控制)。T1和T2如果有任意一個不為0,則該路輸出頻閃參數有效,有以下3種情形:
1.打開時間T1為0,關閉時間T2不為0
這種情形下,該路輸出永遠處于關閉狀態(可以通過控制指令改變狀態)。
2.打開時間T1不為0,關閉時間T2為0
這種情形下,該路輸出永遠處于打開狀態(可以通過控制指令改變狀態)。
3.打開時間T1不為0,關閉時間T2不為0
這種情形下,該路輸出按照T1+T2為周期運行,打開時間為T1,關閉時間為T2。實際使用中以第(3)種情況比較多。
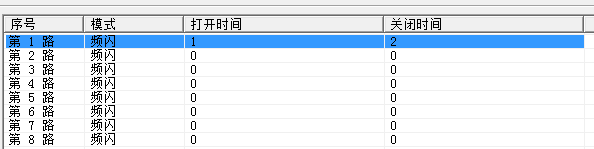
例如把第1路設置為“頻閃”模式,并將打開時間T1設為1,關閉時間T2設為2:
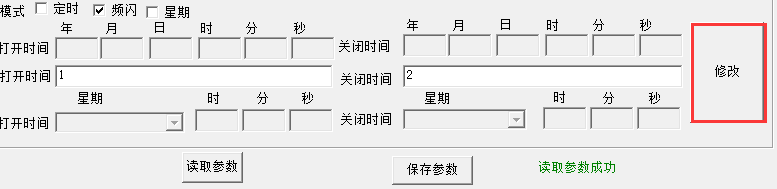
輸入完成后,點“修改”,可以看到新修改的參數同步到IO時間列表里了:
按照這種辦法可以對其余IO進行修改,注意修改完成后,參數并沒有保存到控制板,還需要點“保存設置”按鈕:
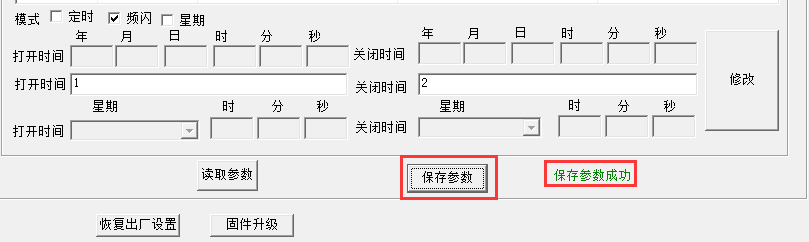
軟件顯示“配置成功”,這時控制板就可以按照所設參數運行了。
6.1.2定時模式
該模式實現輸出的定時打開和關閉。打開時間和關閉時間可以通過配置軟件設置。
仿照上節“頻閃模式”的介紹,打開配置軟件,并調出參數配置界面。
以第1路輸出為例,在配置軟件里選中第1路輸出,在模式選項一行中,勾選“定時”,這時就可以設置該路的打開時間和關閉時間(年月日時分秒):
設置好時間后,點擊“修改”,所設參數同步到了IO列表里,如:
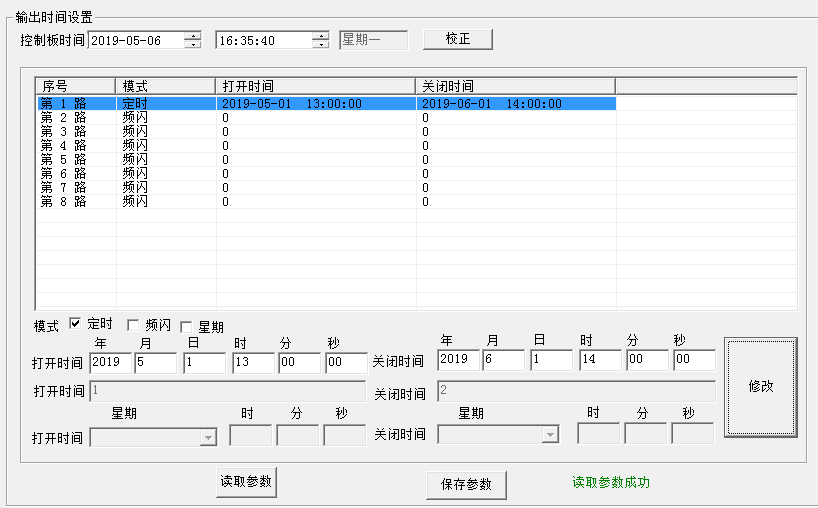
上圖所設參數含義為2019年5月1日13點00分00秒將第1輸出打開,2019年6月1日14點00分00秒將第1路輸出關閉。注意需要點“保存參數”才能生效。
如果不關心某一個時間位(年月日時分秒),可以將該位填“ff”(注意一定是小寫),在“打開時間”里的時間為填ff后,“關閉時間”對應的時間位也不再關心,如:

表示的含義是每到13點00分00秒時將該路輸出打開,每到14點00分00秒時將該路輸出關閉。(因為“打開時間”的年、月和日都是ff,所以“關閉時間”相對應的年、月和日也不再關心)。
該模式下,如果“關閉時間”的有效位小于(或早于)“打開時間”的有效位,參數無效,該路輸出不能按照時間來控制,如設置如下參數是無效的:

上圖為無效參數,因為有效位是時分秒,并且“關閉時間”早于“打開時間”。
6.1.3星期模式
該模式和定時模式類似,只是將定時模式里的“年月日”3個時間位用星期來代替。可以實現星期一到星期日的循環定時控制。
打開配置軟件,并調出參數配置界面。
以第1路輸出為例,在配置軟件里選中第1路輸出,在模式選項一行中,勾選“星期”,這時就可以設置該路的打開時間和關閉時間(星期和時分秒):
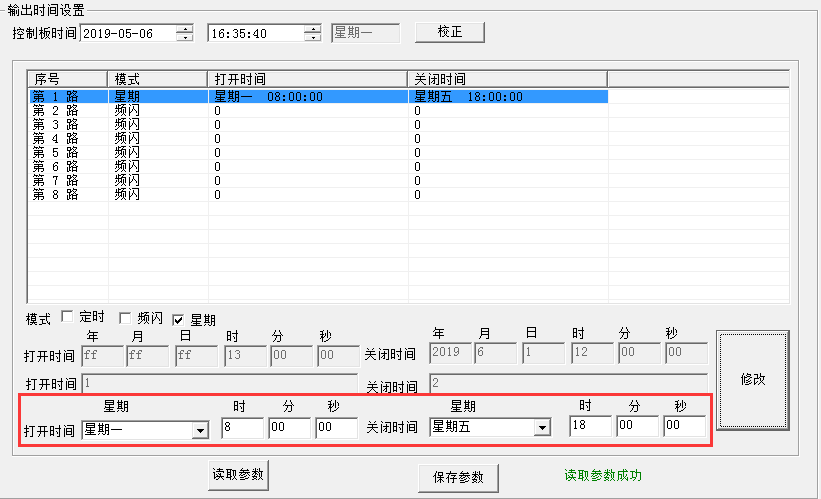
上圖的參數含義為:星期一到星期五,每天的8點00分00秒將該路輸出打開,每天的18點00分00秒將該路輸出關閉。該種模式下,“關閉時間”可以小于(或早于)“打開時間”,如:

上圖參數含義為:星期六18點00分00秒將該路輸出打開,星期五8點00分00秒將該路輸出關閉。
6.1.4時間控制和指令控制的關系
本控制模塊不僅具有靈活多變的時間控制方式,也具有豐富的控制指令(見“模塊通訊協議”部分),時間控制和指令控制的關系是控制板僅執行最后一次觸發動作。
例如當時間控制觸發某一路打開后,再收到關閉該路的指令,那么就將該路關閉(因為最后一次觸發是關閉);
例如當用指令將某一路關閉后,又到了打開該路的時間點,那么就將該路打開(因為最后一次觸發是打開)。
如果某路只用于指令控制,可以將該路設置為頻閃模式,并將打開時間和關閉時間都設為0,出廠默認即為此參數。
6.2二次開發
提供豐富的函數SDK庫,用戶無需關心內部復雜的底層驅動,即可實現設備的控制;控制指令協議全部開放,方便用戶按照項目需求設計相應的控制邏輯。
圖6.6二次開發
七、模塊通訊協議
該設備支持2種協議:Modbus RTU和自定義協議。
7.1自定義協議
自定義協議采用固定幀長(每幀15字節),采用十六進制格式,并具有幀頭幀尾標識,該協議適用于“ZQWL-IO”系列帶外殼產品。
該協議為“一問一答”形式,主機詢問,控制板應答,只要符合該協議規范,每問必答。
該協議指令可分為兩類:控制指令和配置指令。
控制指令:控制繼電器狀態和讀取開關量輸入狀態。
配置指令類:配置設備參數以及復位等。
7.1.1控制指令
控制指令分為2種格式:一種是集中控制指令,一種是單路控制指令。
7.1.1.1集中控制指令
此類指令幀長為15字節,可以實現對繼電器的集中控制(一幀數據可以控制全部繼電器狀態)。詳細集中控制指令如表7.1所示。
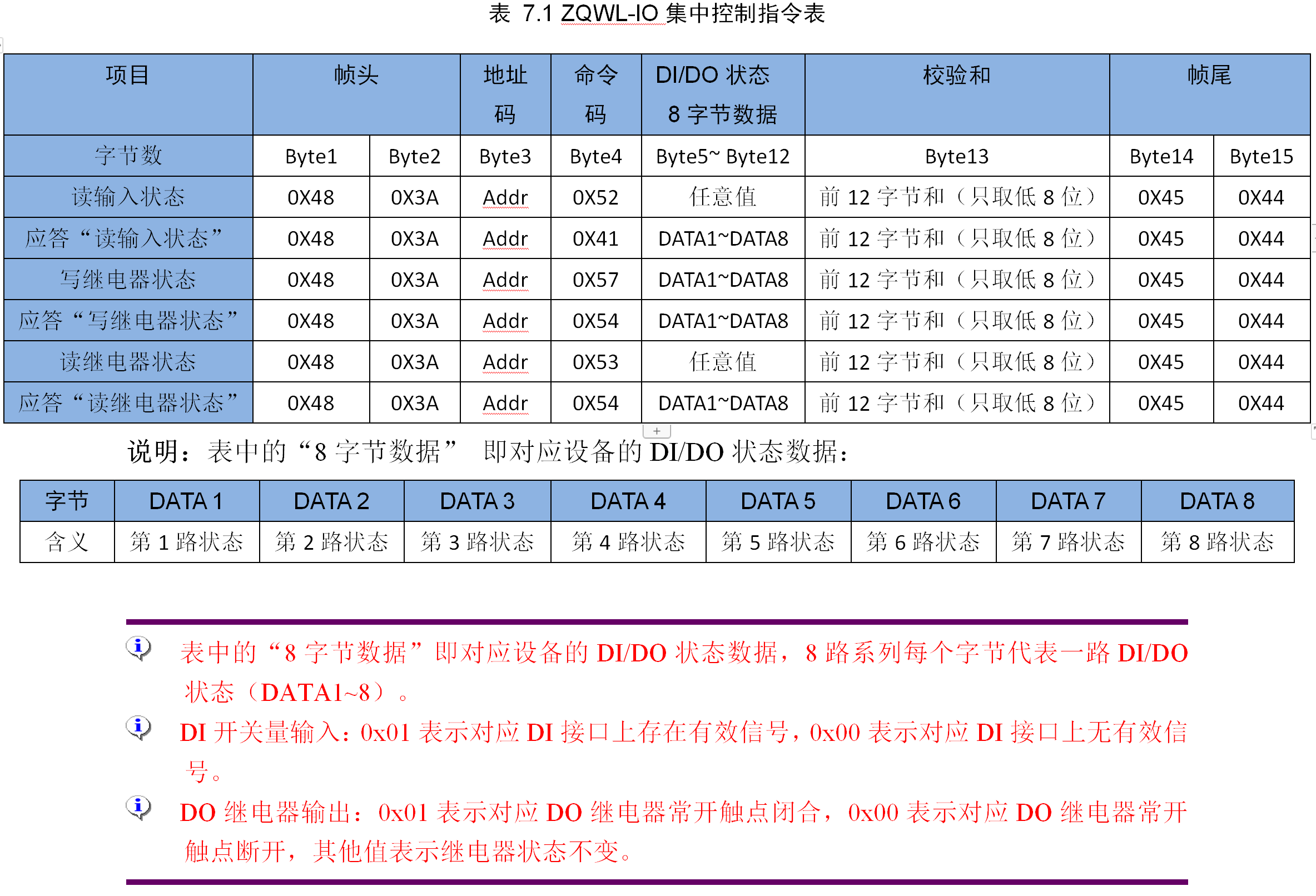
控制碼舉例(十六進制):
1.讀取地址為1的控制板開關量輸入狀態:
發送:48 3a 01 52 00 00 00 00 00 00 00 00 d5 45 44 //讀取設備開關量輸入狀態
地址為1的控制板收到上述指令后應答:
應答:48 3a 0141010100 00 00 00 00 00c645 44 //應答設備開關量輸入狀態
此應答表明,控制板的X1和X2輸入有信號(高電平),X3~ X8無信號(低電平)。
2. 向地址為1的控制板寫繼電器狀態:
發送:48 3a 01 57 01 0001 0000000000dc45 44
此命令碼的含義是令地址為1的控制板的第1個和第3個繼電器常開觸點閉合,常閉觸點斷開;令其他6路繼電器的常開觸點斷開,常閉觸點閉合。注意繼電器板只識別0和1,其他數據不做任何動作,所以如果不想讓某一路動作,可以將該路賦為其他值。例如只讓第1和第3路動作,其他兩路不動作,可以發如下指令:
發送:48 3a 01 57 0102010200000000e045 44
只需要將其他路設置為0x02(或其他值)即可。
控制板收到以上命令后,會返回控制板繼電器狀態:
應答:48 3a 01 5401 0001 0000000000d945 44
7.1.1.2單路控制指令
此類指令幀長為10字節,可以實現對單路繼電器的控制(一幀數據只能控制一個繼電器狀態)。此類指令也可以實現繼電器的延時斷開功能。
詳細指令如表7.2所示。
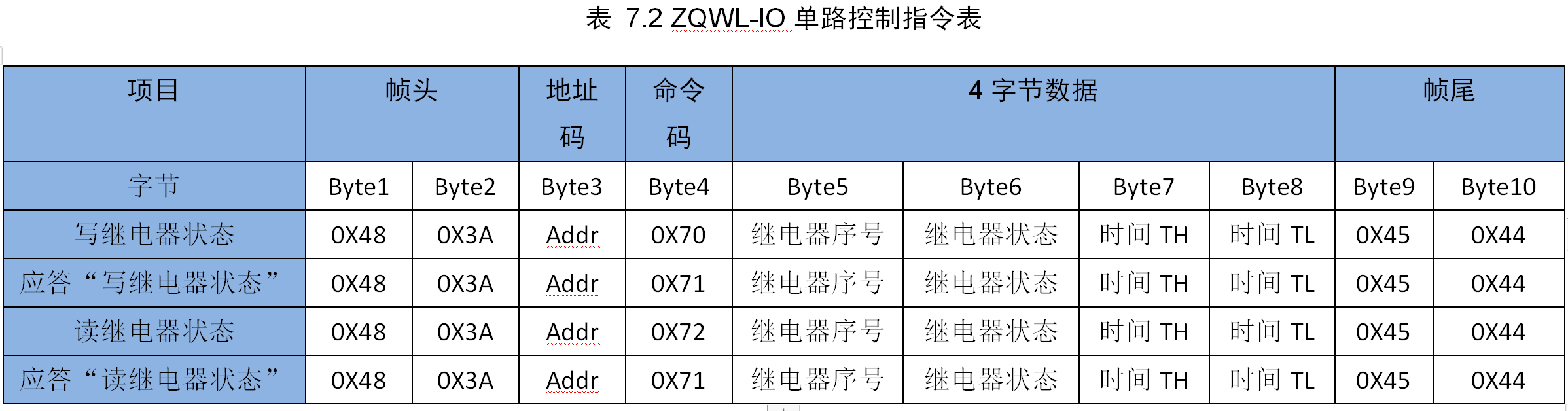
說明:
Byte3是控制板的地址,取值范圍0x00~0xfe,用戶可以通過配置指令來設置地址碼;
Byte5是要操作的繼電器序號,取值范圍是1到8(對應十六進制為0x01到0x08);
Byte6為要操作的繼電器狀態:0x00為常閉觸點閉合常開觸點斷開,0x01為常閉觸點斷開常開觸點閉合,其他值為繼電器保持原來狀態;
Byte7和Byte8為延時時間T(收到Byte6為0x01時開始計時,延時結束后關閉該路繼電器輸出),延時單位為秒,Byte7是時間高字節TH,Byte8是時間低字節TL。例如延時10分鐘后關閉繼電器,則:
時間T=10分鐘=600秒,換算成十六進制為0x0258,所以TH=0x 02,TL=0x 58。
如果Byte7和Byte8都填0x00,則不啟用延時關閉功能(即繼電器閉合后不會主動斷開)。
單路命令碼舉例(十六進制):
1.將地址為1的控制板的第1路繼電器打開:
發送:48 3a 01 70 01 01 00 00 45 44 //設備收到該命令后,將第1路繼電器常閉觸點斷開,常開觸點閉合
應答:48 3a 01 70 01 01 00 00 45 44 //應答第一路繼電器狀態
2.將地址為1的控制板的第1個繼電器關閉:
發送:48 3a 01 70 01 0000 00 45 44 //設備收到該命令后,將第1路繼電器常閉觸點閉合,常開觸點斷開
應答:48 3A 01 71 01 00 00 00 45 44 //應答第一路繼電器狀態
3.將地址為1的控制板的第1路繼電器打開延時10分鐘后關閉:
發送:48 3a 01 70 01 01 025845 44
控制板收到以上命令后,將第1路的繼電器常閉觸點斷開,常開觸點閉合,并會返回控制板繼電器狀態,然后開始計時,10分鐘之后將第一路的繼電器常閉觸點閉合,常開斷開。
4.將地址為1的控制板的第1路繼電器打開延時5秒后關閉:
發送:48 3a 01 70 01 01 000545 44
控制板收到以上命令后,將第1路的繼電器常閉觸點斷開,常開觸點閉合,并會返回控制板繼電器狀態,然后開始計時,5秒之后將第一路的繼電器常閉觸點閉合,常開斷開。
7.1.2配置指令
當地址碼為0xff時為廣播地址,只有“讀控制板參數”命令使用廣播地址,其他都不能使用。
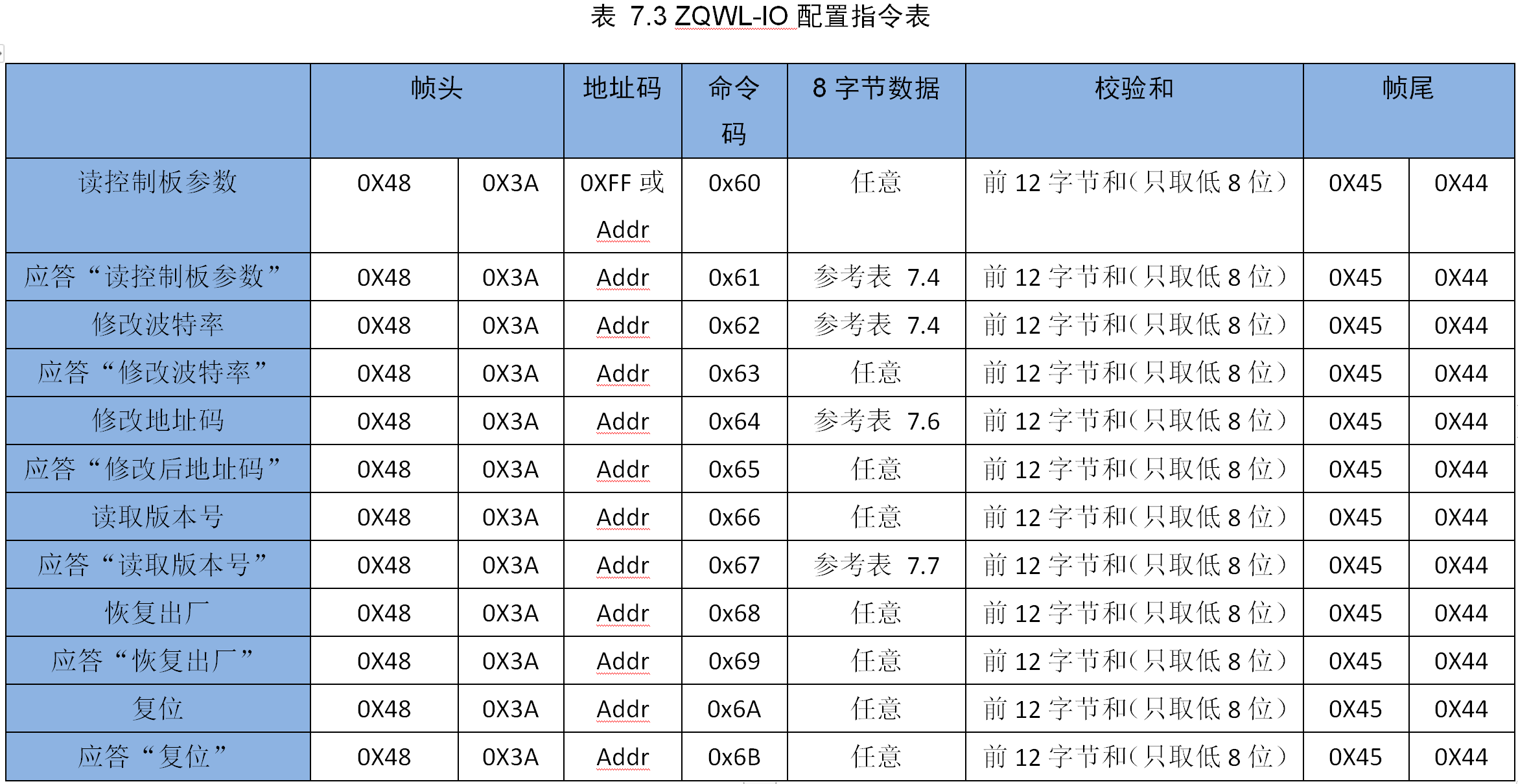

Addr為0xff時,是廣播地址,所有從機都能接收并處理,必要時要做出回應。廣播地址可以用于對控制板的編址以及獲取控制板的地址。
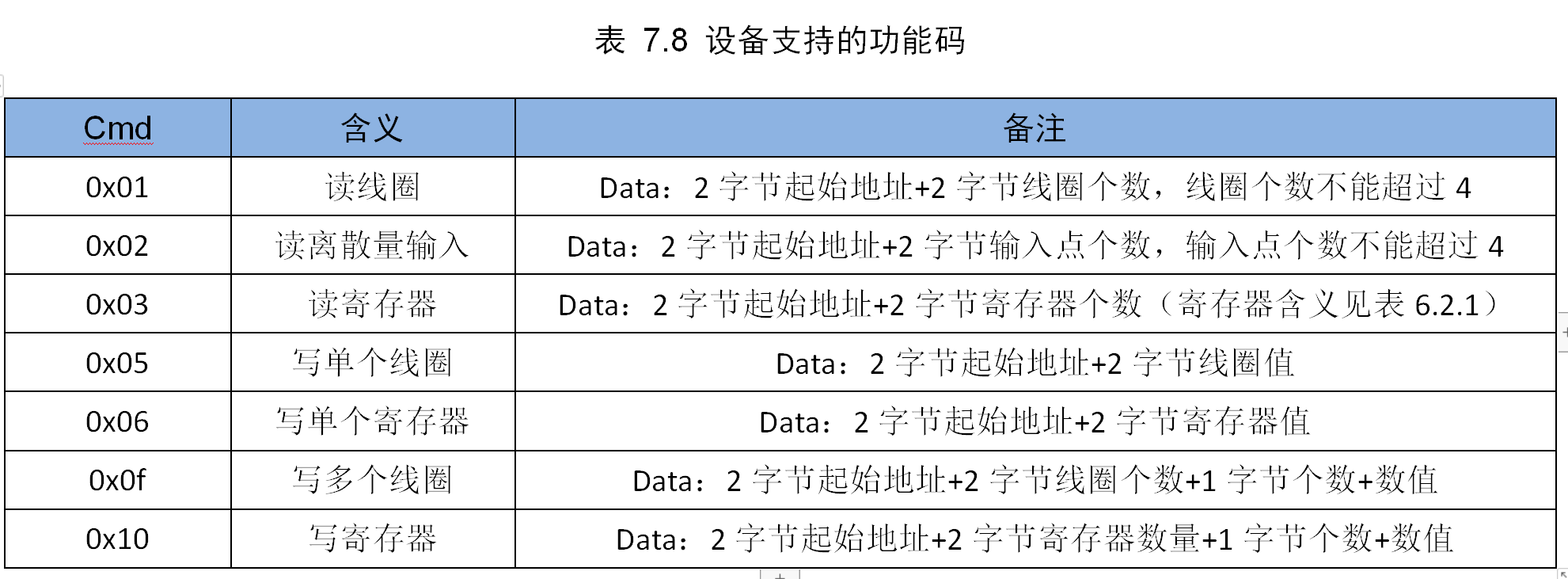
控制板實現的功能碼如表7.8所示。

注意:使用協議修改控制板參數時(波特率、地址),如果不慎操作錯誤而導致無法通訊時,可以按住“RESET”按鍵并保持5秒,等到“SYS”指示燈快閃時(10Hz左右),松開按鍵,此時控制板恢復出廠參數,如下:
串口參數:波特率115200/9600;數據位8;不校驗;1位停止位;
控制板地址:1。
7.3Modbus rtu指令碼舉例
以地址碼addr為0x01為例說明。
1.讀線圈(功能碼:0x01)
該指令是讀取繼電器裝態,為方便和高效,建議一次讀取所有繼電器的狀態。
外部設備請求幀:
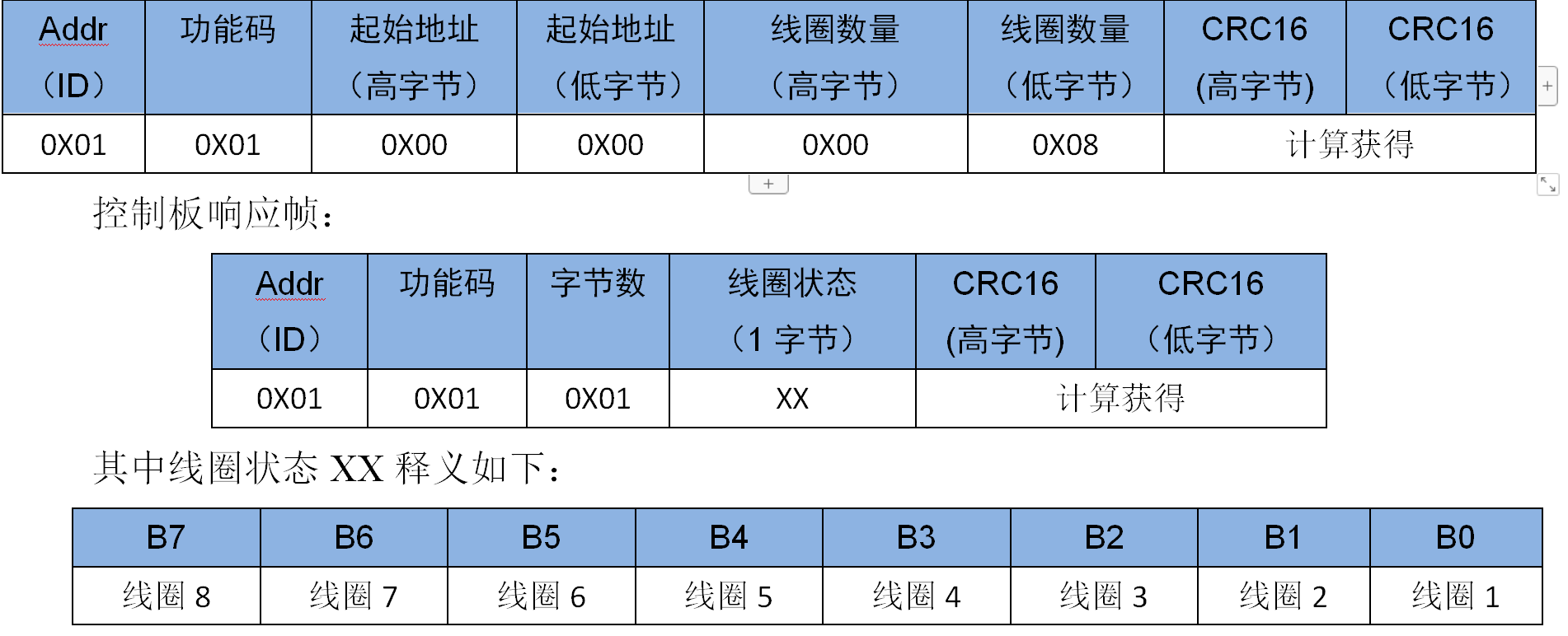
說明:
B0~B7分別代表控制板4個繼電器狀態(Y1~Y8)。
1代表繼電器常開觸點閉合,常閉觸點斷開。
0代表繼電器常開觸點斷開,常閉觸點閉合。
2.讀離散量輸入(功能碼:0x02)
該指令是讀取設備的開關量輸入狀態,為方便和高效,建議一次讀取所有輸入量的狀態。
外部設備請求幀:
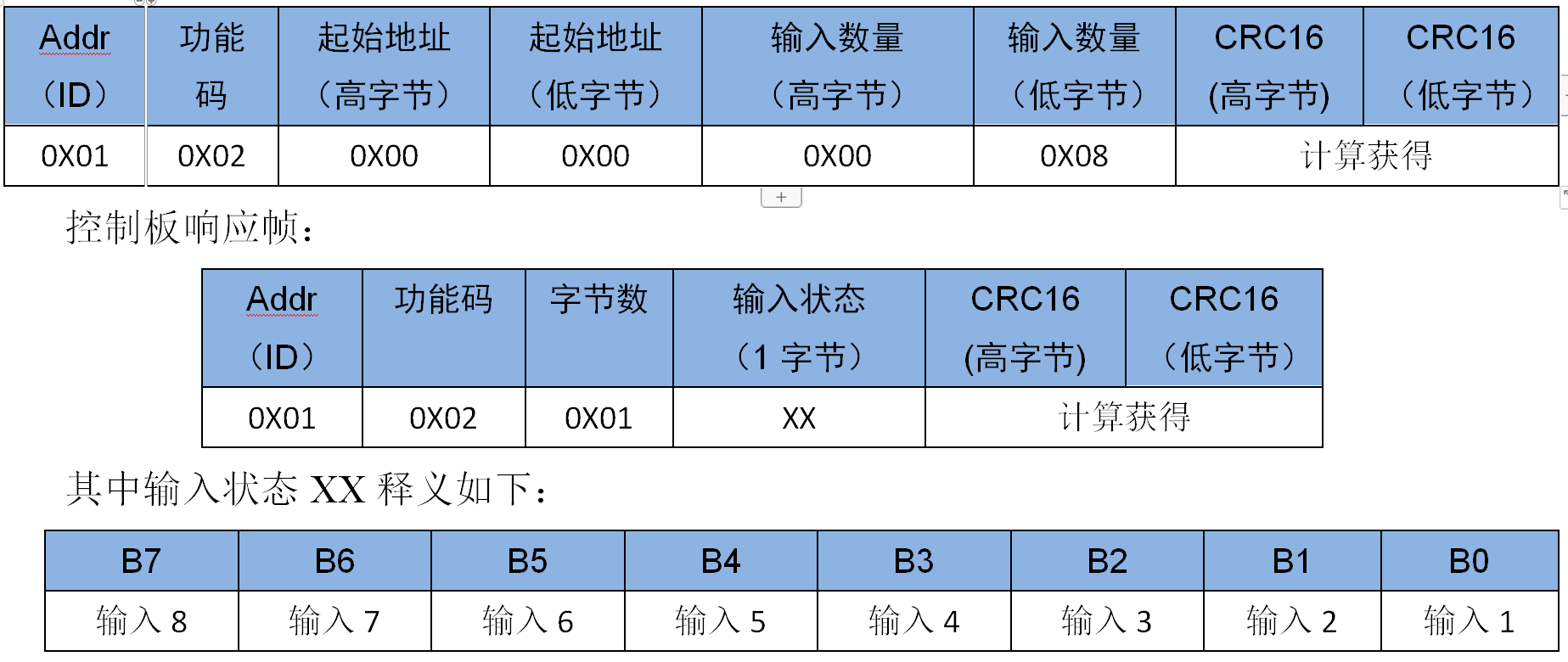
說明:
B0~B7分別代表控制板4個開關量輸入狀態(X1~X8)。
1代表輸入接口存在有效信號。
0代表輸入無有效信號。
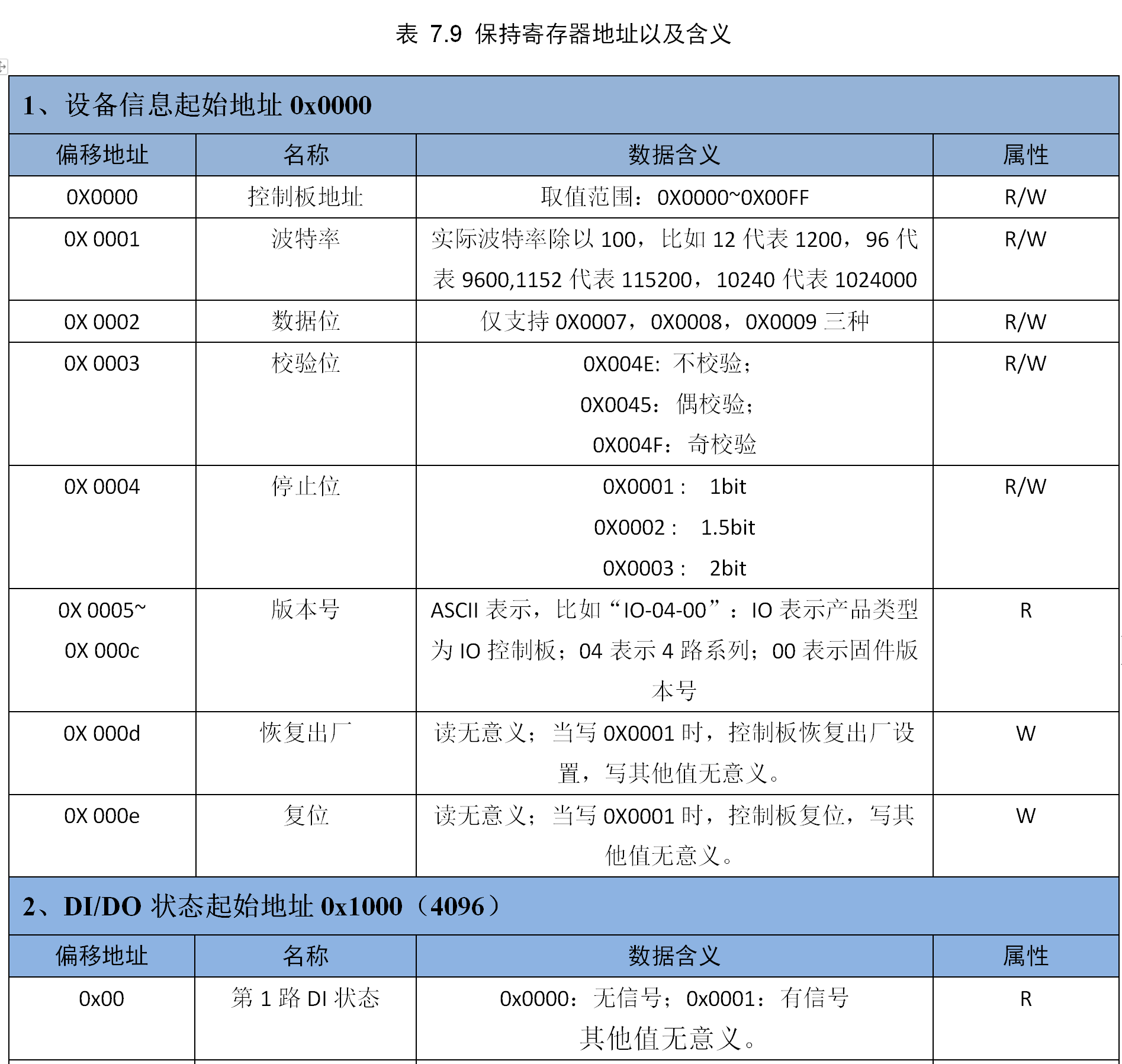
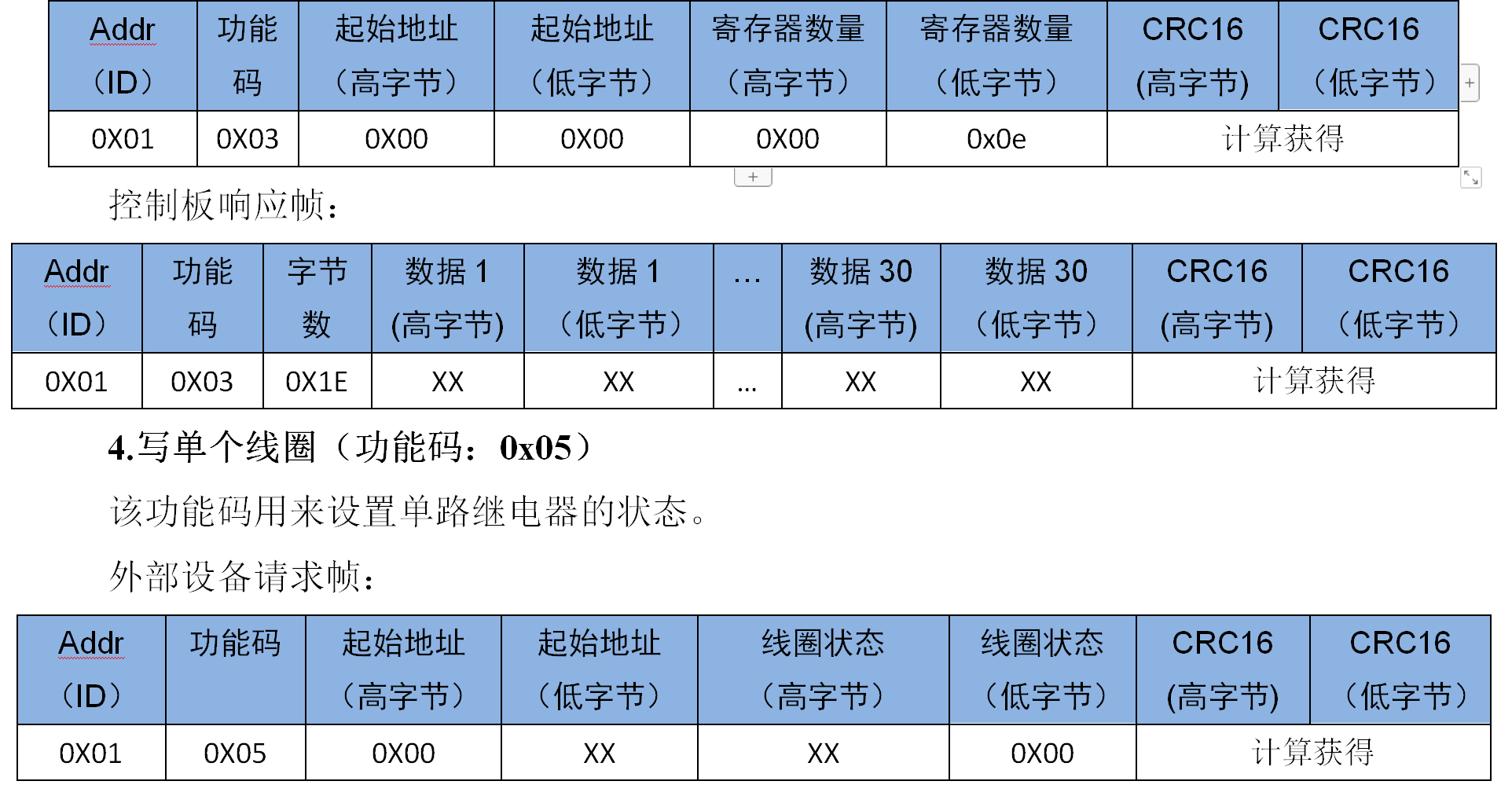
3.讀寄存器(功能碼:0x03)
寄存器地址從0x0000到0x000e,一共15個寄存器。其含義參見表7.9所示。
建議一次讀取全部寄存器。
外部設備請求幀:
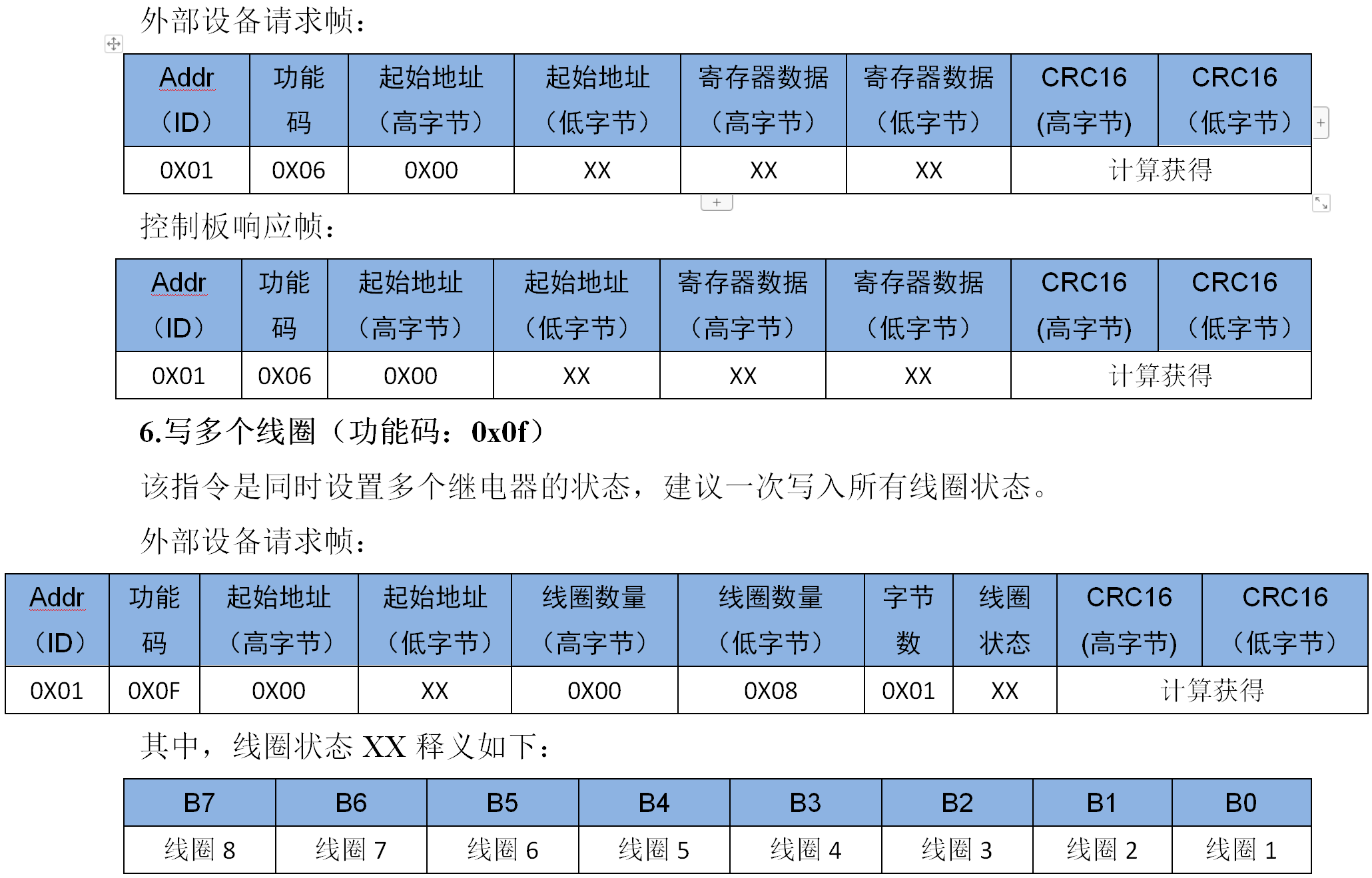
注意:起始地址(低字節)取值范圍是0X00~0X07分別對應控制板的8個繼電器(Y1~Y8);線圈狀態(高字節)為0XFF時,對應的繼電器常開觸點閉合,常閉觸點斷開;
線圈狀態(高字節)為0X00時,對應的繼電器常開觸點斷開,常閉觸點閉合。
線圈狀態(高字節)為其他值時,繼電器狀態保持不變。
控制板響應幀:

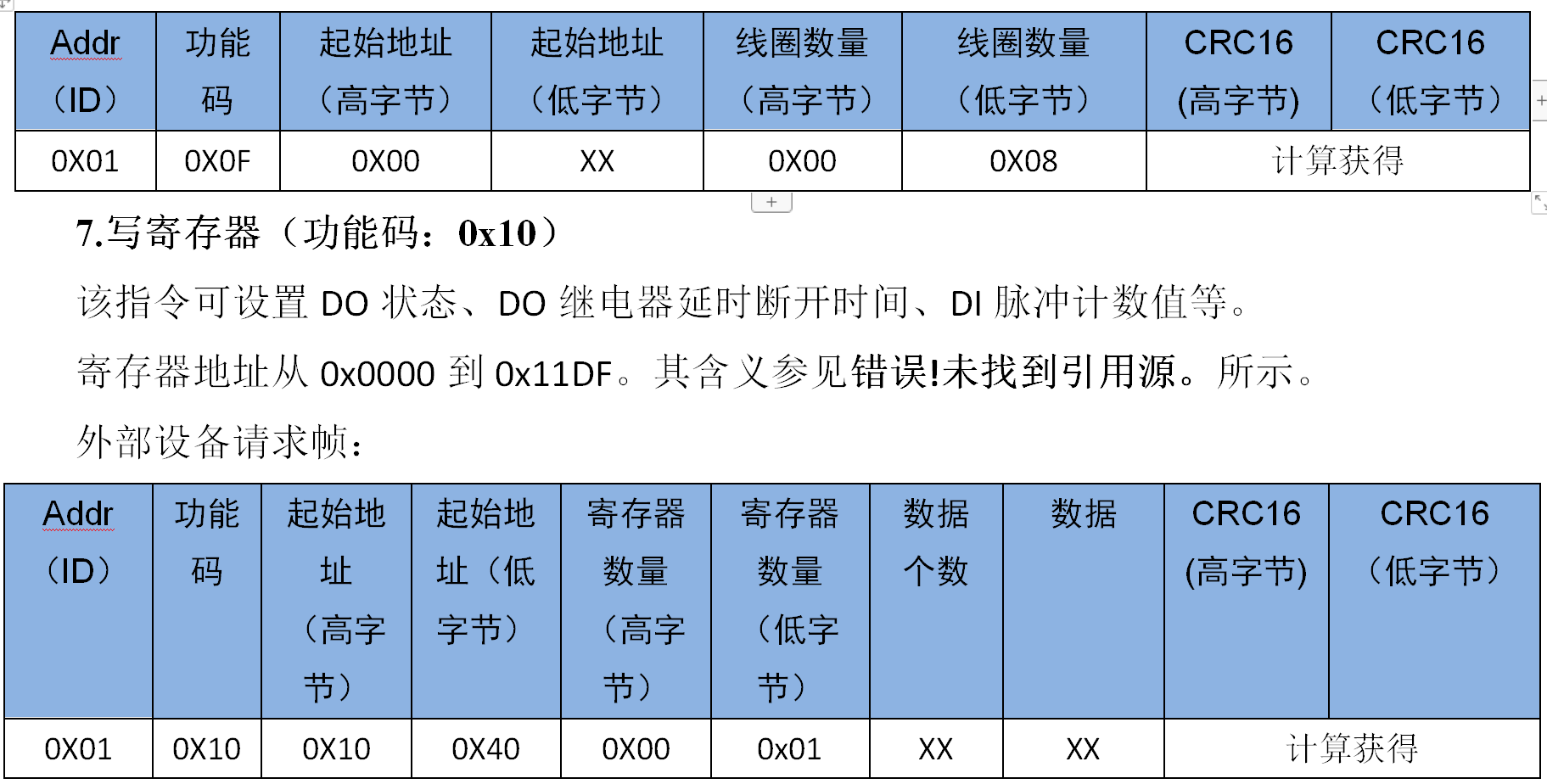
5.寫單個寄存器(功能碼:0x06)
用此功能碼既可以配置控制板的地址、波特率等參數,也可以復位控制板和恢復出廠設置。
注意:使用協議修改控制板參數時(波特率、地址),如果不慎操作錯誤而導致無法通訊時,可以按住“RESET”按鍵并保持5秒,等到“SYS”指示燈快閃時(10Hz左右),松開按鍵,此時控制板恢復出廠參數,如下:
串口參數:波特率115200;數據位8;不校驗;1位停止位;
控制板地址:1。
說明:
B0~B7分別對應控制板的8個繼電器Y1~Y8。
1代表繼電器常開觸點閉合,常閉觸點斷開。
0代表繼電器常開觸點斷開,常閉觸點閉合。
控制板響應幀:
八、恢復出廠設置以及固件升級
8.1恢復出廠設置
控制板有“RESET”按鈕,可以用此復位控制板和恢復出廠設置,如圖8.1所示。

圖8.1按鍵
按下“RESET”按鍵在松開(注意下時間要小于5秒),控制板復位。
按住“RESET”按鍵并保持5秒以上,等到“SYS”指示燈快閃時(10Hz左右),松開按鍵,此時控制板恢復出廠參數,如下:
串口參數:波特率9600/115200;數據位8;不校驗;1位停止位;
控制板地址:1。
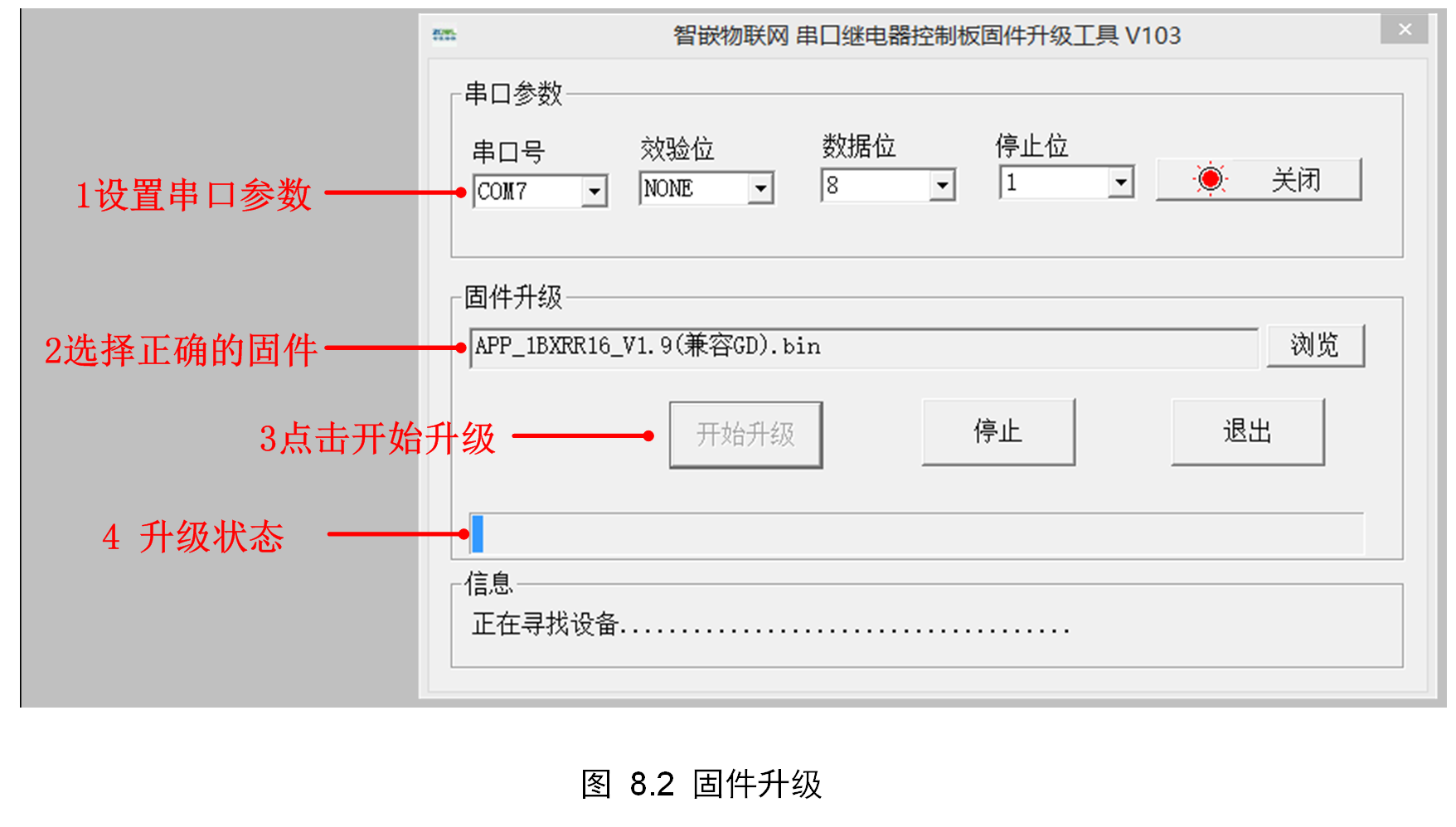
8.2模塊固件升級
注意,需要升級固件時,先與廠商聯系以獲取新的固件,使用智嵌物聯提供的升級工具進行升級。按照圖8.2中所示步驟進行固件升級。
-
工業物聯網
+關注
關注
25文章
2375瀏覽量
64110
發布評論請先 登錄
相關推薦

物聯網中能夠實現溫度自動控制的繼電器方案_溫度繼電器
物聯網中高可靠低功耗長壽命繼電器方案_固態繼電器

八路數據分配器的基本概念及工作原理
密封繼電器是什么繼電器
繼電器開關控制器是什么東西
智嵌物聯串口服務器成對使用模式演示

繼電器光耦在微控制器中的應用





 工商網監
工商網監
評論