") 深入了解角度傳感器
深入了解角度傳感器
?
角度傳感器的定義
角度傳感器是指能感受被測角度并轉(zhuǎn)換成可用輸出信號的傳感器。角度傳感器,顧名思義,是用來檢測角度的。它的身體中有一個孔,可以配合樂高的軸。當連結(jié)到RCX上時,軸每轉(zhuǎn)過1/16圈,角度傳感器就會計數(shù)一次。往一個方向轉(zhuǎn)動時,計數(shù)增加,轉(zhuǎn)動方向改變時,計數(shù)減少。計數(shù)與角度傳感器的初始位置有關。當初始化角度傳感器時,它的計數(shù)值被設置為0,如果需要,你可以用編程把它重新復位。

?

通過計算旋轉(zhuǎn)的角度可以很容易的測出位置和速度。當在機器人身上連接上輪子(或通過齒輪傳動來移動機器人)時,可以依據(jù)旋轉(zhuǎn)的角度和輪子圓周數(shù)來推斷機器人移動的距離。然后就可以把距離轉(zhuǎn)換成速度,你也可以用它除以所用時間。
實際上,計算距離的基本方程式為:距離=速度×時間
由此可以得到:速度=距離/時間
磁敏角度傳感器
磁敏電阻角度傳感器
磁敏感角度傳感器采用高性能集成磁敏感元件,利用磁信號感應非接觸的特點,配合微處理器進行智能化信號處理制成的新一代角度傳感器。

?
特點:無觸點、高靈敏度、接近無限轉(zhuǎn)動壽命、無噪聲、高重復性、高頻響應特性好。
優(yōu)點:
1、磁鋼位置未對準自動補償;
2、故障檢測功能;
3、非接觸位置檢測功能,是滿足苛刻環(huán)境應用需求的理想選擇。
應用領域:
1、工業(yè)機械、工程機械建筑設備、石化設備、醫(yī)療設備、航空航天儀器儀表、國防工業(yè)等旋轉(zhuǎn)速度和角度的測量.
2、汽車電子腳踩油門角位移,方向盤位置,座椅位置,前大燈位置;
3、自動化機器人,運動控制,旋轉(zhuǎn)電機轉(zhuǎn)動和控制.
基于磁敏角度技術的拉線式位移傳感器
傳統(tǒng)的拉線式位移傳感器采用電位器式位移傳感器,它通過電位器元件將機械位移轉(zhuǎn)換成與之成線性或任意函數(shù)關系的電阻或電壓輸出。普通直線電位器和圓形電位器都可分別用作直線位移和角位移傳感器。但是,為實現(xiàn)測量位移目的而設計的電位器,要求在位移變化和電阻變化之間有一個確定關系。電位器式位移傳感器的可動電刷與被測物體相連,物體的位移引起電位器移動端的電阻變化。阻值的變化量反映了位移的量值,阻值的增加還是減小則表明了位移的方向。通常在電位器上通以電源電壓,把電阻變化轉(zhuǎn)換為電壓輸出。傳統(tǒng)的拉線式位移傳感器由于其電刷移動時電阻以匝電阻為階梯變化,其輸出特性亦呈階梯形。如果這種位移傳感器在伺服系統(tǒng)中用作位移反饋元件的時,則過大的階躍電壓會引起系統(tǒng)振蕩。因此在電位器的制作中應盡量減小每匝的電阻值。同時,電位器式傳感器的另一個主要缺點是易磨損、分辨力差、阻值偏低、高頻特性差,從而導致測量精度的下降。它的優(yōu)點是:結(jié)構(gòu)簡單,輸出信號大,使用方便,價格低廉。
基于磁敏角度技術的拉線式位移傳感器以磁場為傳輸載體,將位移變換轉(zhuǎn)換為磁場角度位移,同時,通過通信接口將位移信號返回給應用系統(tǒng)。
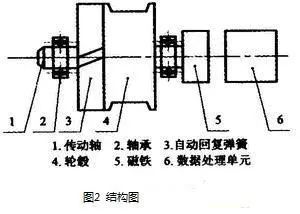
基于磁敏角度技術的拉線式位移傳感器的功能是將拉線的機械位移換成可以計量、記錄或傳送的電信號,主要由自動回復彈簧、輪轂、磁鐵以及數(shù)據(jù)處理單元等部分構(gòu)成,結(jié)構(gòu)如圖2所示。
?
由圖2可以看出,該基于磁敏角度技術的拉線式位移傳感器主要由6部分組成,改變傳統(tǒng)的拉線式位移傳感器接觸式、易磨損、高頻特性差等缺點,基于磁敏角度技術的拉線式位移傳感器以磁場為媒介,將機械位移變化轉(zhuǎn)化為磁場角度變化,一方面解決傳統(tǒng)拉線位移傳感器的接觸方式,另一方面減少了磨損、提高了系統(tǒng)高頻特性,從而確保位移檢測精度。數(shù)據(jù)處理運算器,用于對接收到的磁敏角度信號通過數(shù)學模型運算為拉線的位移信號。通信接口,通過通信接口與應用系統(tǒng)的設備進行通信,接收來自應用系統(tǒng)設備的命令并將采集到的位移信號反饋給應用系統(tǒng)。從而提高了數(shù)據(jù)采集精度、穩(wěn)定性和可靠性,降低了位移傳感器的應用門檻。
各個部件功能描述如下:
1、拉線的鋼繩纏繞在輪轂上,輪轂與一個磁鐵連接在一起,當拉線產(chǎn)生位移的時候,帶動輪轂的轉(zhuǎn)動,輪轂的轉(zhuǎn)動造成與輪轂的軸連接的磁鐵轉(zhuǎn)動,從而磁鐵的磁場產(chǎn)生一個變化的角度。拉線運動發(fā)生的時候,自動回復彈簧確保拉線具備一定的張力,確保拉線的位移與磁敏角度的比例關系。
2、磁敏角度感應器與磁鐵安裝在同一中心軸,用來感應磁鐵角度的變化,選用一種微處理器,該處理器讀取磁敏角度信息,并通過建立數(shù)學模型,將磁敏角度運算為拉線的位移。
3、通訊接口,微處理器通過通信接口接收來自應用系統(tǒng)的命令并將位移信息通過通信接口返回給應用系統(tǒng)。
硬件接口電路
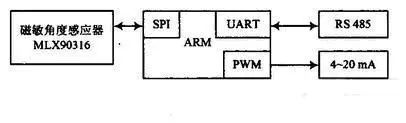
數(shù)據(jù)處理單元由磁敏角度感應器、微處理器單元、通信接口以及輸出模塊,具體的功能框如圖所示。
?
通過分析,磁敏角度感應器將拉線位移所導致的磁鐵磁場轉(zhuǎn)動的角度轉(zhuǎn)換為磁敏角度。微處理器單元選用32位嵌入式ARM用于對接收到的磁敏角度數(shù)據(jù)進行處理,完成磁敏角度數(shù)據(jù)的接收,由于接收到的是磁場轉(zhuǎn)換的角度,所以通過建立數(shù)學模型,結(jié)合輪轂的直徑等因素,將磁敏角度換算為拉線的位移。
電容式角位移傳感器
電容式角位移傳感器用于測量固定部件(定子)與轉(zhuǎn)動部件(轉(zhuǎn)子)之間的旋轉(zhuǎn)角度,因其具有結(jié)構(gòu)簡單,測量精度高,靈敏度高,適合動態(tài)測量等特點,而被廣泛應用于工業(yè)自動控制。
一般來說,電容式角位移傳感器由一組或若干組扇形固定極板和轉(zhuǎn)動極板組成,為保證傳感器的精度和靈敏度,同時避免因環(huán)境溫度等因素的改變導致介電常數(shù)、極板形狀等的間接變化,進而對傳感器性能產(chǎn)生不利影響,對傳感器的制作材料、加工工藝以及安裝精度提出了較高要求,為了克服電容角位移傳感器的局限性,國內(nèi)外科學工作者進行了長期的大量研究工作,其主要思想方法是將傳感器設計成差動結(jié)構(gòu)。

?
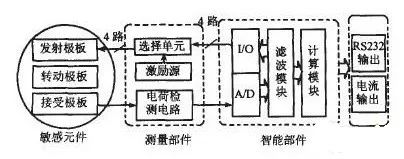
傳感器系統(tǒng)原理框圖如圖所示:
?
由敏感元件、測量電路、智能部件與接口部件構(gòu)成,敏感元件的結(jié)構(gòu)所示如圖1,測量部件由選擇單元、激勵源和電荷檢測單元組成;智能部件由I/O單元、A/D單元、濾波單元、角度計算單元等組成;接口部件由電流輸出單元、RS232通訊單元等組成。
敏感元件檢測反映角度位置的電容值,是傳感器的初始轉(zhuǎn)換單元,測量單元采用了先進的抗雜散微小電容檢測電路,將電容值轉(zhuǎn)換為電信號,智能部件的主要功能是通過比例式算法計算出角位移量,最后由接口部件輸出角度計算結(jié)果。
傾角傳感器
傾角傳感器經(jīng)常用于系統(tǒng)的水平測量,從工作原理上可分為“固體擺”式、“液體擺”式、“氣體擺”三種傾角傳感器,傾角傳感器還可以用來測量相對于水平面的傾角變化量。
傾角傳感器基本原理
理論基礎就是牛頓第二定律,根據(jù)基本的物理原理,在一個系統(tǒng)內(nèi)部,速度是無法測量的,但卻可以測量其加速度。如果初速度已知,就可以通過積分計算出線速度,進而可以計算出直線位移。所以它其實是運用慣性原理的一種加速度傳感器。
當傾角傳感器靜止時也就是側(cè)面和垂直方向沒有加速度作用,那么作用在它上面的只有重力加速度。重力垂直軸與加速度傳感器靈敏軸之間的夾角就是傾斜角了。
?
隨著MEMS 技術的發(fā)展,慣性傳感器件在過去的幾年中成為最成功,應用最廣泛的微機電系統(tǒng)器件之一,而微加速度計就是慣性傳感器件的杰出代表。作為最成熟的慣性傳感器應用,現(xiàn)在的MEMS 加速度計有非常高的集成度,即傳感系統(tǒng)與接口線路集成在一個芯片上。

?
傾角傳感器把MCU,MEMS加速度計,模數(shù)轉(zhuǎn)換電路,通訊單元全都集成在一塊非常小的電路板上面。可以直接輸出角度等傾斜數(shù)據(jù),讓人們更方便的使用它。
其特點是:硅微機械傳感器測量(MEMS)以水平面為參面的雙軸傾角變化。輸出角度以水準面為參考,基準面可被再次校準。數(shù)據(jù)方式輸出,接口形式包括RS232、RS485和可定制等多種方式。抗外界電磁干擾能力強。
傾角傳感器的分類
“固體擺”式慣性器件
固體擺在設計中廣泛采用力平衡式伺服系統(tǒng),其由擺錘、擺線、支架組成,擺錘受重力G和擺拉力T的作用,如應變式傾角傳感器就基于此原理。
“液體擺”式慣性器件

?
液體擺的結(jié)構(gòu)原理是在玻璃殼體內(nèi)裝有導電液,并有三根鉑電極和外部相連接,三根電極相互平行且間距相等。當殼體水平時,電極插入導電液的深度相同。如果在兩根電極之間加上幅值相等的交流電壓時,電極之間會形成離子電流,兩根電極之間的液體相當于兩個電阻RI和RIII。若液體擺水平時,則RI=RIII。當玻璃殼體傾斜時,電極間的導電液不相等,三根電極浸入液體的深度也發(fā)生變化,但中間電極浸入深度基本保持不變。左邊電極浸入深度小,則導電液減少,導電的離子數(shù)減少,電阻RI增大,相對極則導電液增加,導電的離子數(shù)增加,而使電阻RIII 減少,即RI>RIII。反之,若傾斜方向相反,則RI<RIII。
在液體擺的應用中也有根據(jù)液體位置變化引起應變片的變化,從而引起輸出電信號變化而感知傾角的變化。在實用中除此類型外,還有在電解質(zhì)溶液中留下一氣泡,當裝置傾斜時氣泡會運動使電容發(fā)生變化而感應出傾角的“液體擺”。
“氣體擺”式慣性器件
氣體在受熱時受到浮升力的作用,如同固體擺和液體擺也具有的敏感質(zhì)量一樣,熱氣流總是力圖保持在鉛垂方向上,因此也具有擺的特性。“氣體擺”式慣性元件由密閉腔體、氣體和熱線組成。當腔體所在平面相對水平面傾斜或腔體受到加速度的作用時,熱線的阻值發(fā)生變化,并且熱線阻值的變化是角度q或加速度的函數(shù),因而也具有擺的效應。其中熱線阻值的變化是氣體與熱線之間的能量交換引起的。
“氣體擺”式慣性器件的敏感機理基于密閉腔體中的能量傳遞,在密閉腔體中有氣體和熱線,熱線是唯一的熱源。當裝置通電時,對氣體加熱。在熱線能量交換中對流是主要形式。
固、液、氣體擺性能比較
就基于固體擺、液體擺及氣體擺原理研制的傾角傳感器而言,它們各有所長。在重力場中,固體擺的敏感質(zhì)量是擺錘質(zhì)量,液體擺的敏感質(zhì)量是電解液,而氣體擺的敏感質(zhì)量是氣體。
氣體是密封腔體內(nèi)的唯一運動體,它的質(zhì)量較小,在大沖擊或高過載時產(chǎn)生的慣性力也很小,所以具有較強的抗振動或沖擊能力。但氣體運動控制較為復雜,影響其運動的因素較多,其精度無法達到軍用武器系統(tǒng)的要求。
固體擺傾角傳感器有明確的擺長和擺心,其機理基本上與加速度傳感器相同。在實用中產(chǎn)品類型較多如電磁擺式,其產(chǎn)品測量范圍、精度及抗過載能力較高,在武器系統(tǒng)中應用也較為廣泛。
液體擺傾角傳感器介于兩者之間,但系統(tǒng)穩(wěn)定,在高精度系統(tǒng)中,應用較為廣泛,且國內(nèi)外產(chǎn)品多為此類
角度傳感器的選擇標準
1、頻率響應特性
角度傳感器的頻率響應特性決定了被測量的頻率范圍,必須在允許頻率范圍內(nèi)保持不失真的測量條件,實際上傳感器的響應總有—定延遲,希望延遲時間越短越好。
傳感器的頻率響應高,可測的信號頻率范圍就寬,而由于受到結(jié)構(gòu)特性的影響,機械系統(tǒng)的慣性較大,因有頻率低的傳感器可測信號的頻率較低。
在動態(tài)測量中,應根據(jù)信號的特點(穩(wěn)態(tài)、瞬態(tài)、隨機等)響應特性,以免產(chǎn)生過火的誤差。
2、靈敏度的選擇
通常,在角度傳感器的線性范圍內(nèi),希望角度傳感器的靈敏度越高越好。因為只有靈敏度高時,與被測量變化對應的輸出信號的值才比較大,有利于信號處理。但要注意的是,傳感器的靈敏度高,與被測量無關的外界噪聲也容易混入,也會被放大系統(tǒng)放大,影響測量精度。因此,要求傳感器本身應具有較高的信噪比,盡員減少從外界引入的廠擾信號。
傳感器的靈敏度是有方向性的。當被測量是單向量,而且對其方向性要求較高,則應選擇其它方向靈敏度小的傳感器;如果被測量是多維向量,則要求傳感器的交叉靈敏度越小越好。
3、穩(wěn)定性
傳感器使用一段時間后,其性能保持不變化的能力稱為穩(wěn)定性。影響傳感器長期穩(wěn)定性的因素除傳感器本身結(jié)構(gòu)外,主要是傳感器的使用環(huán)境。因此,要使傳感器具有良好的穩(wěn)定性,傳感器必須要有較強的環(huán)境適應能力。
另外,在選擇角度傳感器之前,應對其使用環(huán)境進行調(diào)查,并根據(jù)具體的使用環(huán)境選擇合適的傳感器,或采取適當?shù)拇胧瑴p小環(huán)境的影響。
4、線性范圍
角度傳感器的線形范圍是指輸出與輸入成正比的范圍。以理論上講,在此范圍內(nèi),靈敏度保持定值。傳感器的線性范圍越寬,則其量程越大,并且能保證一定的測量精度。在選擇傳感器時,當傳感器的種類確定以后首先要看其量程是否滿足要求。
但實際上,任何傳感器都不能保證絕對的線性,其線性度也是相對的。當所要求測量精度比較低時,在一定的范圍內(nèi),可將非線性誤差較小的傳感器近似看作線性的,這會給測量帶來極大的方便。
角度傳感器的好壞并非單一因素決定的。簡單說來并不是越靈敏越好,或是越穩(wěn)定越好。這些都是多方面的考慮。綜合自身的要求去選擇適合自己的傳感器才是最好的。
研發(fā)銷售6軸、9軸電子羅盤(陀螺儀|加速計|磁力計)、傾角傳感器、姿態(tài)傳感器,慣導、數(shù)據(jù)采集盒、IoT遠程智慧監(jiān)測等
產(chǎn)品廣泛應用于:無人機、無人船、巡檢/引導/送餐/水下機器人、AGV、云臺裝置、望遠鏡、Qiang支瞄準鏡、雷達定位、聚光太陽能、工礦/隧道無人設備等!
核心研發(fā)人員十年技術積累,專業(yè)研發(fā)團隊,軍工級品質(zhì),替代進口。
?
-
電子羅盤
+關注
關注
1文章
123瀏覽量
23311 -
傾角傳感器
+關注
關注
3文章
275瀏覽量
25180 -
角度傳感器
+關注
關注
7文章
133瀏覽量
36173 -
AHRS
+關注
關注
0文章
24瀏覽量
14019 -
姿態(tài)解算
+關注
關注
0文章
49瀏覽量
8259
發(fā)布評論請先 登錄
相關推薦
線性霍爾效應傳感器角度測量原理、實現(xiàn)和校準

深入了解PCI轉(zhuǎn)XMC載板轉(zhuǎn)接卡
MR角度傳感器與磁阻傳感器有什么區(qū)別
TMR角度傳感器的工作原理
使用位置傳感器輸出數(shù)據(jù)的角度計算方法
深入了解六軸力傳感器:原理、分類與應用
深入了解 MEMS 振蕩器 溫度補償 MEMS 振蕩器 TC-MO
方向角度傳感器故障怎么解決
方向角度傳感器壞了有什么影響
方向角度傳感器零點位置怎么判斷
如何設計具有AMR角度傳感器的位置感應系統(tǒng)呢?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論