 AGV小車是如何通過AGV激光導航儀識別反光柱坐標
AGV小車是如何通過AGV激光導航儀識別反光柱坐標
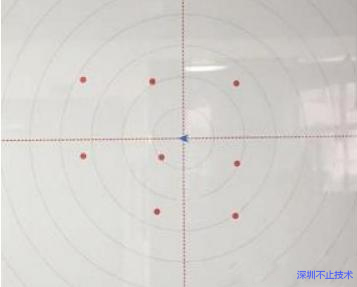
AGV小車定位原理——識別反光柱坐標
通過過濾反射系數,可以得到同一反光柱上多個激光點的詳細數據(角度、距離、反射系數)。然后通過簡單的數學計算和規律分析,就可以得到該反光柱相對導航儀的準確坐標。
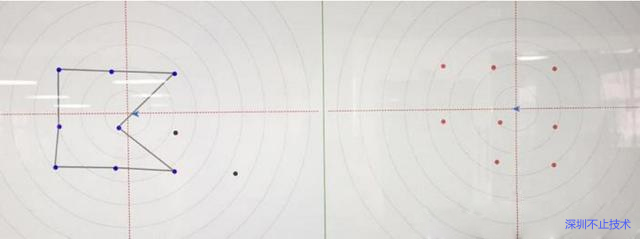
AGV叉車定位原理——定位匹配
想要獲得AGV激光導航儀坐標和角度,必須同時滿足以下2個條件:
①AGV叉車導航儀至少可以掃描到3個反光柱
②叉車AGV導航儀掃描到的多個反光柱構成的圖形,在已有地圖數據中,可以成功匹配到相同構形。利用已有地圖數據,結合即時掃描的反光柱坐標,反推出AGV導航儀位姿。
深圳市不止技術有限公司是激光雷達行業頭部知名企業,團隊自2016年底就開始了多款激光雷達方案的研發,并創造了30多件發明專利,我們作為激光雷達行業5年多的資深老兵,對激光雷達有著深厚的技術積累。是一家能提供單點、單線到多線全系列、dtof、itof全品類激光雷達方案定制化的公司,而且掌握了機器人移動底盤技術。在激光雷達核心硬件、專用芯片、AI算法上具有完整的自主知識產權
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
激光雷達
+關注
關注
968文章
3987瀏覽量
190066 -
激光系統
+關注
關注
0文章
151瀏覽量
9414
發布評論請先 登錄
相關推薦
這么全的AGV小車有配件 趕快收藏
是agv小車行走的關鍵部件,通常包含麥克納姆輪、全向輪、萬向輪等,適用于不同的導航系統和移動需求; 電機 電機是agv小車提供動力的核心零部

AGV小車的工作原理是什么?
AGV小車通過導航定位、路徑規劃、任務接收與執行、運動控制、安全監測、狀態監測和電池管理等系統協同工作,以實現高效、準確的物流搬運。 1. 導航

如何選擇讓自己滿意(適合)的agv小車?純干貨分享
上的零部件配送、物流中心的長距離運輸等。不同的應用場景對AGV小車的類型和功能有不同的要求。 負載能力:根據搬運貨物的重量選擇適當負載能力的AGV小車。
AGV激光導航定位技術與構建地圖
AGV是制造物流重要設備,激光導航AGV高可靠靈活,SLAM技術關鍵,激光SLAM成熟且落地豐富,無需人工標志物,復合式

智能呼叫、激光導航、自動避障,為什么AGV機器人被需要?
AGV機器人通過感應、導航等技術提升制造靈活性,滿足定制化需求,節省人力成本。AGV小車與智能制造系統交互,實現高效生產。新興技術如物聯網、

AGV讀卡器在AGV自動搬運小車上應用方案
AGV小車上的AGV讀卡器通過讀取地面軌道的RFID電子標簽信息,做出相應的動作(如改變速度、選擇軌道、定位和停車等)。在AGV

什么是AGV小車?有什么功能?適用于哪些場景?
搭載不同的負載,實現物料在不同工位、倉庫、生產線之間的自動搬運。這大大減少了人工搬運的工作量,提高了工作效率。 自動導航: AGV小車通過不同的導航

智能時代小巨人:地牛AGV搬運機器人
AGV AGV小車雖然體積小巧,但這并不影響它強大的負重能力,它不需要人工去操作駕駛,能夠實現無人搬運車的功能,而且隨著AGV小車的發展,已

AGV選型要點及步驟,保證企業選擇的AGV小車更實用
AGV小車作為智能化物流倉儲不可或缺的工具,在制造業得到了廣泛的應用,市場需求呈現出井噴式增長。但是AGV市場還存在著很多問題,制造企業在產品選型時往往缺乏正確的引導。 毫無疑問,我們的自動化物流

AGV小車使用避障雷達
AGV(自動導引車)小車使用避障雷達是為了確保其在運行過程中的安全性和穩定性。避障雷達,如激光雷達或超聲波雷達,能夠實時檢測并避免與障礙物發生碰撞。 AGV
AGV小車上的慣性導航模塊運用——SGPM02
之前我們介紹過SGPM01系列陀螺儀模塊在智能泳池清潔機器人導航的方案(SGPM01)。這款慣性導航模塊收到了許多企業的歡迎。由此,愛普生推出了SGPM02系列陀螺儀模塊

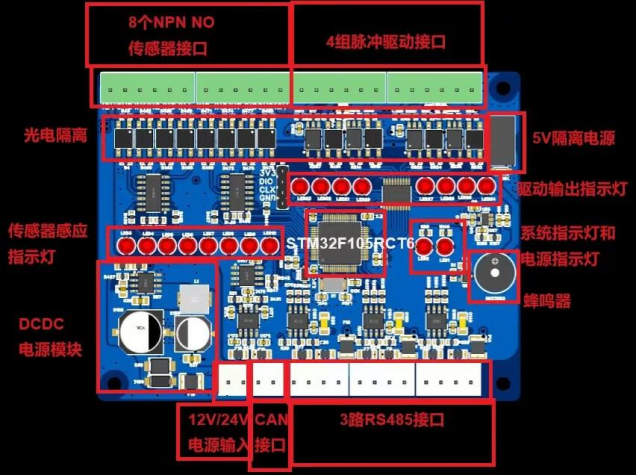
AGV小車升降平臺控制板
簡介: 應用于控制AGV小車升降,推拉,勾取動作 應用場景: 升降裝置結構,AGV小車升降推拉裝置結構 1、產品介紹: 本產品是AGV
激光,磁性,視覺?什么是AGV最好的導航系統?
勞動力成本上漲和消費者對產品質量要求的提高,推動傳統制造業向高效、靈活的生產模式轉型。激光AGV作為智能化物流解決方案,通過激光SLAM導航技術實現自主定位與





 工商網監
工商網監
評論