 大話中國C-V2X通訊標準應用層標準
大話中國C-V2X通訊標準應用層標準
一、前言
2017年9月18日,中國智能網聯汽車產業創新聯盟攜手重慶長安汽車、通用汽車、清華大學等單位發布了我國第一部V2X應用層團體標準:《合作式智能運輸系統?車用通信系統應用層及應用數據交互標準 T/CSAE?53-2017》,該標準的發布填補了我國V2X應用層標準的空白。
2020年12月31日,中國智能網聯汽車產業創新聯盟聯合星云互聯、重慶長安汽車、通用汽車等單位對2017年的標準進行了完善,推出《合作式智能運輸系統車用通信系統應用層及應用數據交互標準(第一階段)T/CSAE 53-2020》(以下簡稱DAY1)標準代替了T/CSAE 53-2017標準。與此同時,中國智能網聯汽車產業創新聯盟也聯同星云互聯科技、電信科學技術研究院、華為技術有限公司等單位推出了V2X第二階段標準:《合作式智能運輸系統車用通信系統應用層及應用數據交互標準(第二階段)》(以下簡稱DAY2標準),在第一階段標準基礎之上豐富了應用層場景。
北匯信息作為蜂窩車聯(C-V2X)工作組成員,2019年進入C-V2X市場后,深耕C-V2X測試領域,已為數十家企業交付了成套的C-V2X測試臺架及測試服務,包括國內多家汽車整車廠、零部件企業以及檢測機構。
1.1在DAY1標準中對合作式智能運輸系統車用通信系統進行了描述
合作式智能運輸系統車用通信系統,旨在通過智能運輸系統各子系統之間的信息交互,實現道路安全、通行效率、信息服務等各類應用。為此,不同廠商車輛之間,以及這些車輛與其所能到達的區域范圍內的道路基礎設施之間,必須實現互聯互通。
以車用通訊系統中的車載單元(OBUOn-Board Unit)為例,車載設備通常包括了如下圖所示的子系統:
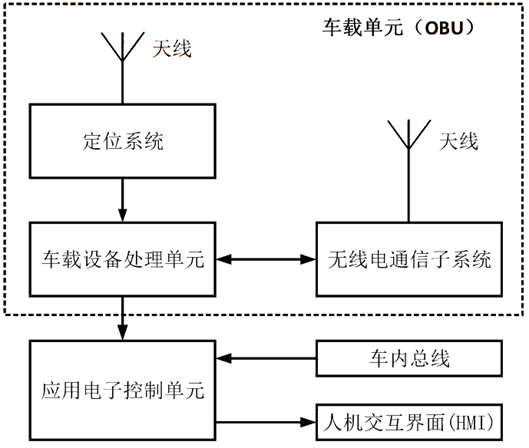
圖1合作式智能運輸系統車用通信系統車載設備構成示意圖
- 無線電通信子系統:接收和發送空中信號。一個車載設備里可以裝配一個或者多個無線電通信子系統;
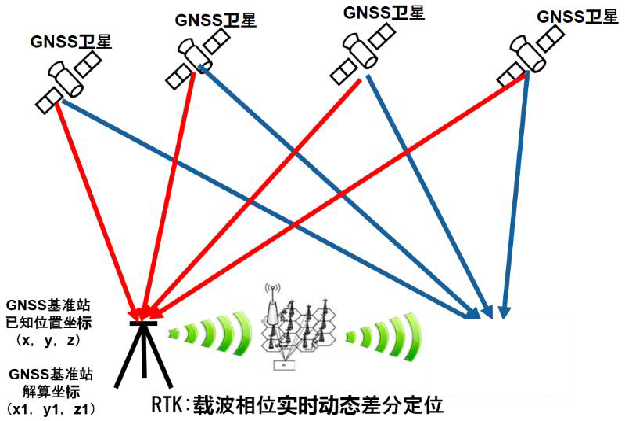
- 定位系統:該子系統通常包含全球導航衛星系統(GNSS, Global Navigation Satellite System)接收器,用以提供車輛的位置、方向、速度和時間等信息。該子系統可以通過車速信號、慣性測量單元、差分定位系統等技術來實現增強定位;
- 車載設備處理單元:運行程序以生成需要發送的空中信號,以及處理接收的空中信號;
- 天線:實現射頻信號的接收和發送。
車載設備通過接口與應用電子控制單元相連,在應用電子控制單元中運行程序實現車用通信系統的應用,并通過人機交互界面(HMI, Human Machine Interface)來實現對駕駛員的提醒,包括圖像、聲音、振動等方式。
1.2標準對應用范圍進行了圈定
基于國際標準化組織(ISO)指定的通訊系統七層參考模型,及歐美正在制定的車用通訊系統構架,車用通信系統通常可以分為系統應用、應用層、傳輸層、網絡層、數據鏈路層和物理層。DAY1標準著重關注了應用層及應用層與上下相鄰兩層的數據交互接口,如圖2所示。應用層協議主要包括消息集和消息集內的數據幀與數據元素,以及消息的數據結構和編碼方式。DAY1標準通過對道路安全、通行效率和信息服務等基礎應用的分析,定義在實現各種應用時,本車與其他車輛、道路交通設施及其他交通參與者之間的信息交互內容、交互協議與接口等。
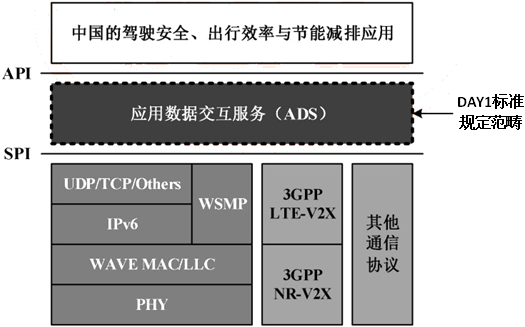
圖2標準范圍示意圖
二、車用通信系統基礎應用
2.1 DAY1應用場景
DAY1標準選擇了安全、效率、信息服務三個方面覆蓋了17個應用場景,包括前向碰撞預警、交叉路口碰撞預警、異常車輛提醒、綠波車速引導、前方擁堵提醒、汽車近場支付等。如表1:
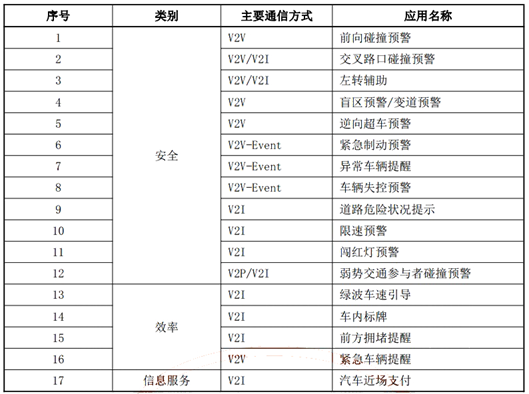
表1 DAY1應用列表
DAY1標準在應用定義、主要場景、系統基本原理、通信方式、基本性能要求和數據交互需求6個方面對17個場景進行定義的同時,也根據應用對通信頻率和時延的不同需求將17個一期應用分為了兩大類:
- 一是高時延(>100 ms)、低頻率(<10 Hz)的應用,可通過4G蜂窩通信技術實現;
- 二是低時延(≤100 ms)、高頻率(≥10 Hz)的應用,需要LTE-V2X、DSRC或5G通信技術的支持才能實現。
通過對比DAY1階段的CSAE53-2017和CSAE53-2020兩個版本需求,我們不難發現,相較于CSAE53-2017標準,CSAE53-2020對定位精度提出了更高要求,如表2所示:
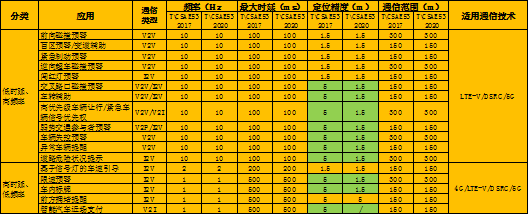
表2一期應用按通訊需求分類表
除前方擁堵提醒定位精度保持5m、智能汽車近場支付定位精度取消外,其余應用都將定位精度由5m提升到了1.5m,這對GNSS定位精度提出了更高的要求。
2.2 DAY2應用場景
DAY2標準基于DAY1標準,選擇面向安全、效率、信息服務、交通管理、高級智能駕駛等領域,定義了12個典型應用,其中包括感知數據共享、協作式變道、協作式車輛匯入等應用,如表3:

表3 DAY2應用列表
DAY2標準也在應用定義、預期效果、主要場景、系統基本原理、通信方式、基本性能要求和數據交互需求7個方面,對12個第二階段應用場景分別進行描述。
對比DAY1和DAY2標準,我們不難發現,DAY1標準的應用場景更多關注的是單車在車路協同環境下的預警功能實現,而在DAY2階段,更多的場景則聚焦到了車路協作、交通控制管理等方面。筆者從場景分類維度對DAY1和DAY2中的場景進行了區分,如表4:

表4中國標準V2X通訊應用場景
由表4我們可以看到,DAY2標準中,對盲區預警/變道預警、弱勢交通參與者碰撞預警、緊急車輛提醒三個場景進行了更為深入的研討。在對應的安全分類中加入了感知數據共享、協作式車輛匯入、協作式交叉口通行應用場景,在效率分類中新加入了道路收費服務、動態車道管理、協作式車輛匯入及協作式交叉口同行場景,在信息服務分類中加入了差分數據服務、場站路徑引導服務、道路收費服務應用場景。同時也新增加了交通管理及高級智能駕駛兩個分類,在交通管理分類中新增了動態車道管理及浮動車數據采集應用場景,在高級智能駕駛分類新增了協作式車輛編隊管理應用場景。
值得關注的是,DAY2標準更聚焦于“協作”上,DAY2標準中對于車輛的命名由DAY1標準中的HV(Host Vehicle)和RV(Remote Vehicle)變為了EV1(Equipped Vehicle 1),EV-2(Equipped Vehicle 2),這也意味著標準由DAY1階段的關注自車“權益”轉向了DAY2階段的關注交通參與者的“權益”,也佐證了筆者DAY2標準更聚焦于“協作”的觀點。
本文以DAY1中的盲區預警/變道預警場景和DAY2中的協作式變道場景為例說明。
盲區預警/變道預警和協作式變道兩個場景共同關注點及預期效果都在于兩輛車之間如何安全的進行變道,以消除駕駛盲區所帶來的駕駛風險。圖3、4、5分別是DAY1的變道預警場景和DAY2的協作式變道場景,展示了一輛車(盲區預警/變道預警場景中為HV,協作式變道場景中為EV-1)在行駛過程中意圖變道,另一輛車(盲區預警/變道預警場景中為RV,協作式變道場景中為EV-2)在該過程中存在安全風險,以期避免風險產生的過程。不同的是盲區預警/變道預警場景的預期目的是HV駕駛員收到預警后,能有足夠時間采取措施,避免與相鄰車道上的 RV發生碰撞。而協作式變道場景的預期目的則是相關車輛(EV-2)接收到 EV-1變道意圖信息,結合自身行駛狀態與周圍環境信息做出判斷,采取減速讓道或加速通過駕駛行為。
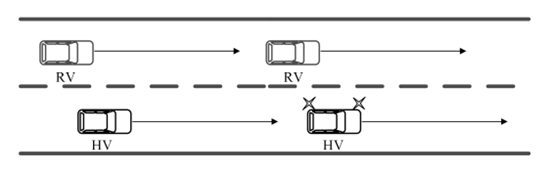
圖3 DAY1盲區預警/變道預警場景

圖4 DAY2協作式變道場景EV-2加速通過

圖5 DAY2協作式變道場景EV-2減速讓行
在盲區預警/變道預警場景中關注的是HV的行駛安全及狀態,而在協作式變道場景更多關注的是協作車輛之間的協作行為。
三、應用層交互數據集
CSAE應用層標準遵循“消息集-數據幀-數據元素”三層嵌套結構規則對應用層數據集進行制定;采用了ASN.1抽象語法進行定義,實現了跨平臺和不同編程語言的兼容;考慮到射頻性能,數據集交互的編解碼方式遵循非對齊壓縮編碼規則UPER(Unaligned Packet Encoding Rules),有效壓縮空口通信數據包的大小。
在DAY1標準中定義了基礎的BSM、SPAT、RSI、MAP、RSM五大類消息,如圖6。DAY2在DAY1基礎上對MAP、RSI消息進行了拓展之外,也新提出了PAM、PSM、RSC等新的消息體,如圖7。
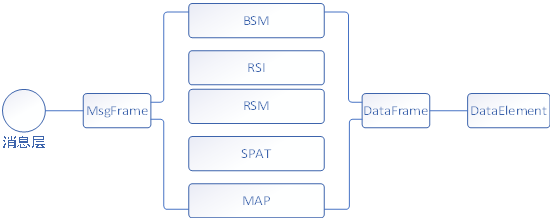
圖6 DAY1中的應用層交互數據集
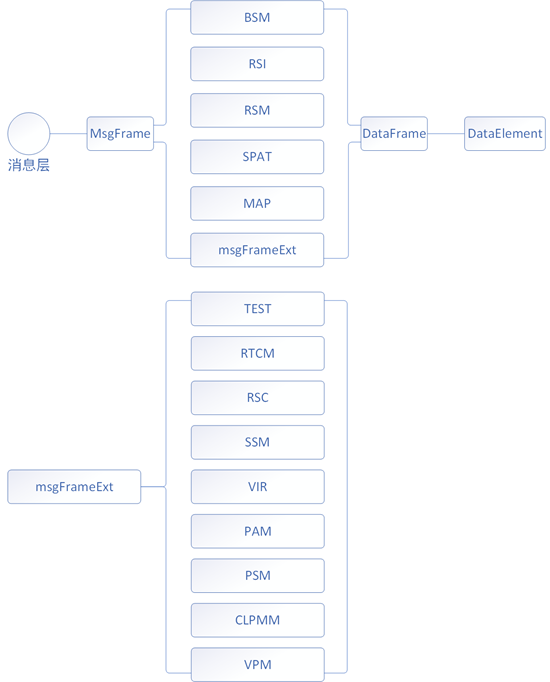
圖7 DAY2中的應用層交互數據集
四、總結
DAY1標準、DAY2標準的推出對中國V2X通信標準的建立和深化有著重要意義,對車用通信系統應用場景開發、驗證及商用起到了極大的推動作用。
北匯信息作為蜂窩車聯(C-V2X)工作組成員,2020年也參與到了由中國智能網聯汽車產業創新聯盟、IMT-2020(5G)推進組C-V2X工作組、中國汽車工程學會等單位承辦的“C-V2X新四跨暨大規模先導應用示范活動“中,如圖8。

圖8北匯信息在“C-V2X新四跨暨大規模先導應用示范活動“
北匯信息專注于汽車電子,深耕C-V2X測試,提供專業多元化的C-V2X測試系統搭建及測試咨詢服務。
本次為大家簡單介紹了中國V2X通訊標準應用層標準,后續將會為大家帶來更多的基于C-V2X測試的相關內容。同時也歡迎垂詢和溝通,共同探討。
注:本文圖片素材源于CSAE 53-2017合作式智能運輸系統 車用通信系統應用層及應用數據交互標準、CSAE 53-2020合作式智能運輸系統 車用通信系統應用層及應用數據交互標準(第一階段)、CSAE 157-2020合作式智能運輸系統 車用通信系統應用層及應用數據交互標準(第二階段)
-
智能網聯汽車
+關注
關注
9文章
1060瀏覽量
31078
發布評論請先 登錄
相關推薦
是德科技出席2024 C-V2X“四跨”(上海)先導應用實踐活動
PCM2707C是否支持Android系統?PCM2707C Android應用層怎么寫?
物聯網設備的標準與規范
Linux應用層控制外設的兩種不同的方式
60V 容差板和標準 TPS272C45 評估模塊之間的差異

C-V2X安全證書:保障車路云系統通信安全的關鍵

MHMF021L1C2-MINAS A6 系列 標準規格書 松下

數字證書與數字簽名:汽車C-V2X通信安全的基石

Qorvo半導體解碼車聯網:探索駕駛的未來浪潮與標準化
車聯萬物C-V2X與背后的連接組件
5G車聯網按下加速鍵,三大廠商亮劍,5G車規模組新品有何亮點?

Samtec應用科普 | C-V2X技術在汽車領域的應用






 工商網監
工商網監
評論