 在TPT中創建SOTIF場景
在TPT中創建SOTIF場景
SOTIF(預期功能安全)是技術產品安全的一個子領域,處理技術系統的危險。目前正在專門為汽車行業制定的“ISO 21448 -道路車輛-預期功能安全性”標準,是便于將對產品和產品開發過程的要求提高到統一標準。因此,SOTIF是產品安全的一部分,并且在許多國家都是合法的,如德國和中國。
該標準的范圍確定為新的、創新的和復雜的功能,并定義了由于功能限制而導致的錯誤的處理程序。
SOTIF旨在填補現有安全和安全標準的空白。一個著名的安全標準代表是ISO 26262,它處理由隨機硬件故障或系統錯誤引起的錯誤的概念、程序和措施。作為補充,SOTIF因此概述了避免任何不合理風險的目標,這些風險是由預期功能的不足、其實現和合理可預見的個人濫用所導致的危險。
該標準的核心是在安全和意識兩個維度上對場景的風險評估,我們稱其為場景矩陣。因此,該標準劃分了以下四個方面:
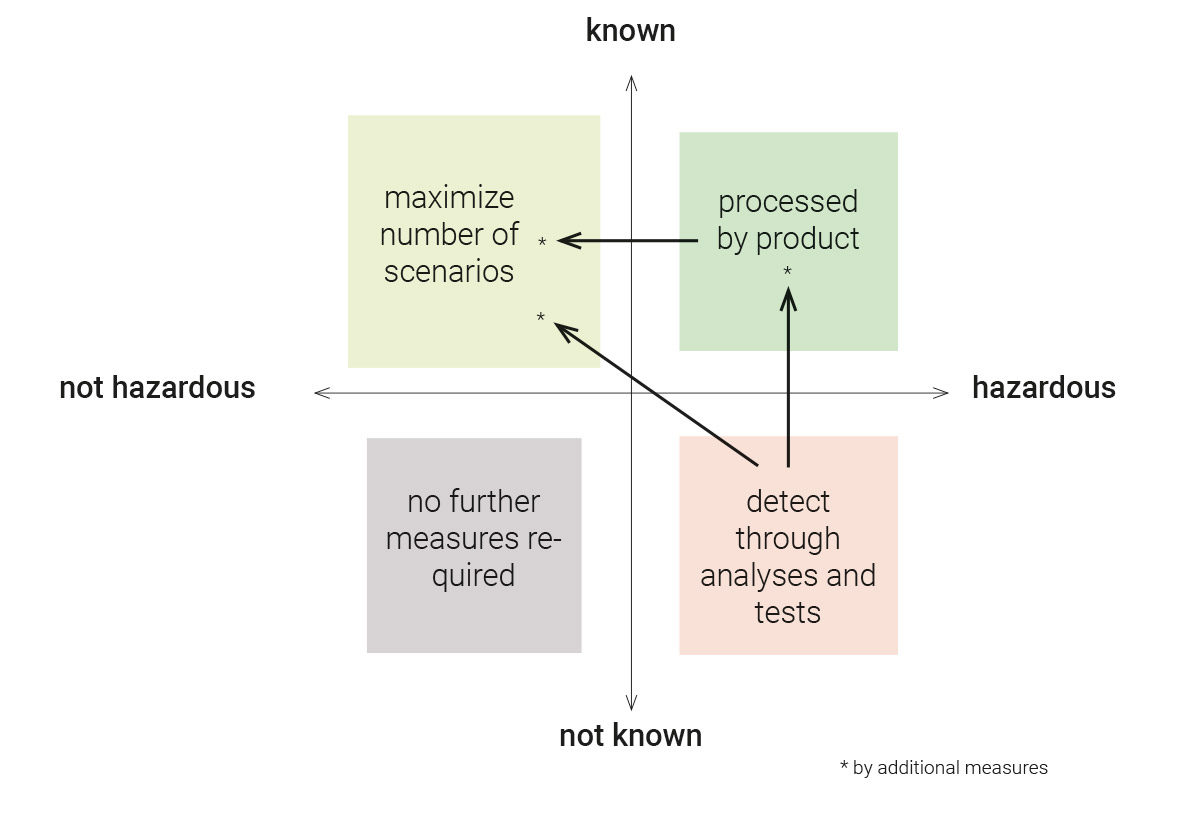
場景矩陣模型
該標準的目的是確定未知和危險的情況,并防止它們的發生。在我們看來,識別和消除所謂的邊緣情況對高度自動化駕駛功能的成功實現非常重要。
該規范基本上使用了場景這個術語。
情景是一種具有可能的變化組合的情況。一個例子是“路邊的孩子”。這種情況的變化如下:
>孩子在路邊停了下來
>孩子穿過馬路
在任何情況下,系統都不應該為駕駛員和他的環境造成危險。
問題是你不可能從一開始就知道所有可能的情況。新開發的正常情況是逐步獲取信息和數據。這種迭代的方法導致了場景的持續擴展。這需要一個技術解決方案來處理擴展。
我們的案例研究可能擴展如下:
>有/沒有迎面而來的車輛
>天氣(雨、雪、晴、陰)
>其他人在路邊
>傳感器臟/干凈
>一個垃圾袋飄在空中
每個場景可以有任何額外數量的安全相關方面。重要的是要知道,一個情況的擴展可以是相互依賴的,但不是必須的。這有時會使描述變得非常復雜和困難。根據我們的經驗,了解依賴性和獨立性使得創建測試用例更加容易。
不幸的是,我們也無法從一開始就知道所有這些依賴項。你必須準備好增加和改變不同方面。
測試用例定義將進一步復雜化,因為它們將確認大量為測試場景建模創建的測試用例。
因此,我們建議盡早開始使用系統的結構化方法進行V&V驗證,因為預期會發生頻繁的更改。
從我們的角度來看,您已經可以通過虛擬測試在軟件級別開始V&V驗證,從而在早期階段獲得知識。
最后的驗證必須在車輛上進行,所有測試的基礎可以在所有測試級別上復用。
我們問自己,TPT——我們的測試自動化工具——今天是如何支持這個標準的。
簡而言之,TPT提供了以下可能性:
>擁有用于創建任何復雜性場景的測試建模語言和用于所有變量處理的結構化方法
>背對背測試,在模型、軟件、硬件和網絡之間進行可復用的測試,從單元級到完整的集成/產品級
>在CI/CT/CD環境和云(Windows/Linux)中快速執行測試
>預期結果的可重用定義,獨立于測試用例
>仿真環境集成,如CarMaker和VTD,以及提供設置個人清晰模型的選項
在TPT中,有一種測試建模語言可用于場景描述。因此,基于模型開發的優點,例如上下文分離、分層和清晰性,也可以用于測試。測試用例的實現直接來源于測試模型。
從我們和眾多客戶的角度來看,幾乎沒有比開發基于場景的測試更簡單的方法了。在任何時候,測試人員都對所有創建的場景有一個很好的概覽。用戶可以輕松地展開它們并添加變量。單一數據源的方法也使它們非常容易維護。由于結構和系統化前所未有的清晰,所有測試用例的創建和維護活動以及所有測試的評審都將加速進行。
-
TPT
+關注
關注
0文章
23瀏覽量
6981
發布評論請先 登錄
相關推薦
智能網聯汽車預期功能安全(SOTIF)開發解決方案

aes算法在移動應用中的應用場景
康謀分享 | 在基于場景的AD/ADAS驗證過程中,識別挑戰性場景!

思瑞浦發布支持振鈴抑制功能的汽車級CAN SIC收發器TPT1462xQ

如何在Draftsman中創建PCB制造圖紙
TPT 20自動化全面升級,讓測試擁有更多選擇

中控流程工業首款AI時序大模型TPT發布
詳解智慧路燈桿LED屏在不同場景中的應用


labview 創建mysql 表時 設置時間 怎么在mysql中是格式是date 而不是datetime?
使用paramiko在eNSP的交換機中批量創建VLAN

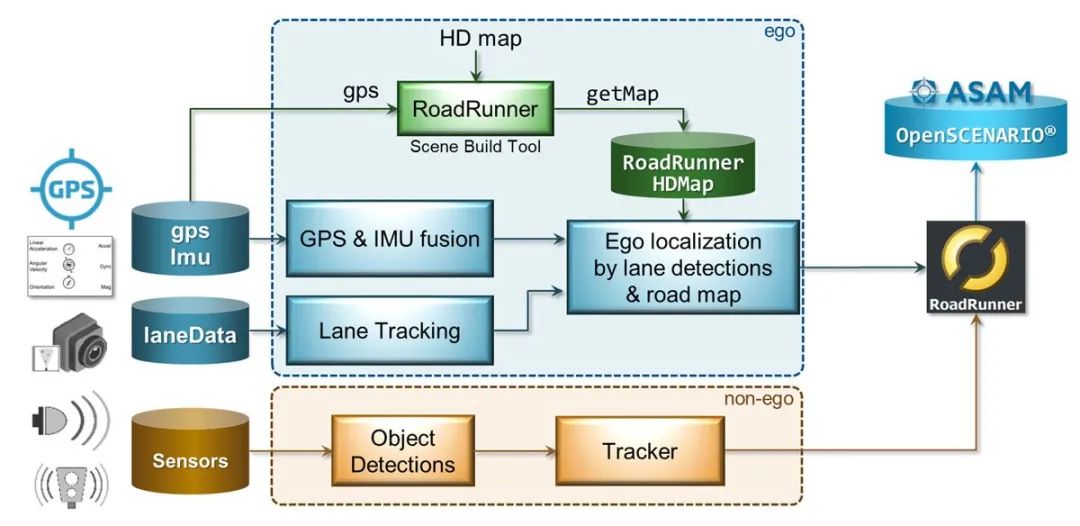
從記錄的傳感器數據中獲取駕駛場景
思瑞浦汽車級LIN收發器全家族產品TPT1021Q、TPT1022Q、TPT1024Q





 工商網監
工商網監
評論