 Q&A | 關于高級硬件在環(HIL)您想要了解的十個問題
Q&A | 關于高級硬件在環(HIL)您想要了解的十個問題
HiL(Hardware-in-the-Loop)硬件在環仿真測試系統是采用實時處理器運行仿真模型來模擬受控對象(比如:汽車、航空飛機等設備)的運行狀態,以此判斷電控模塊的性能。虹科Orolia GNSS模擬器帶來優秀的HIL仿真測試方案。
Q1:什么是HIL?
硬件在環(HIL)仿真是一種用于測試導航系統的技術,其中測試前并不知道車輛軌跡。在這種情況下,車輛軌跡被實時饋送到GNSS模擬器。HIL可用于復雜實時系統的開發和測試,如衛星控制系統、軍事戰術導彈、飛機飛行控制和汽車系統。
虹科Orolia GNSS模擬器的HIL設置允許用戶實時發送真實的車輛軌跡,并生成相應的GNSS射頻信號。
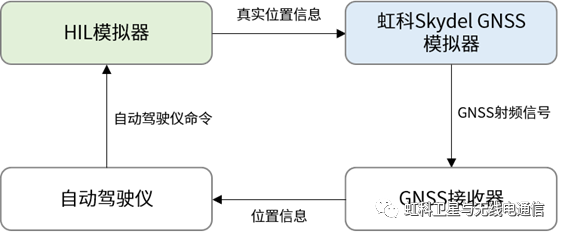
上圖描繪了一個閉環,其中真實位置傳輸到系統中,自動駕駛儀應用命令實時影響車輛軌跡。系統中的HIL模擬器和虹科Orolia Skydel GNSS模擬器造成的附加延遲必須足夠小,來保障不會對自動駕駛儀和GNSS接收器性能的測試和測量產生負面影響。
Q2:使用虹科Orolia Skydel/GSG-8 GNSS模擬器時,如何驗證HIL仿真性能水平?
使用虹科Orolia Skydel時檢查HIL模擬性能水平的最佳方法是使用性能圖和HIL圖,這些都是功能強大的可視化工具,旨在幫助用戶驗證HIL解決方案是否完全按照預期工作。
Q3:虹科Orolia Skydel/GSG-8 HIL系統延遲是怎樣的?
隨著虹科Orolia Skydel 22.5版本的發布,HIL延遲可以減少到10ms。使用時間戳和公共時鐘源,延遲是一定存在的。而虹科Orolia Skydel優秀的性能和HIL選項使之成為優化任何硬件(虹科Orolia GSG-8或其他自定義硬件)延遲的最佳診斷工具。
Q4:將虹科Orolia Skydel模擬器集成到HIL環境中需要哪些硬件/軟件/組件?
要將虹科Orolia Skydel模擬器集成到HIL環境中,需要以下要素:
- 分布式時鐘參考:以確保HIL模擬器上的操作系統和虹科Orolia Skydel模擬器使用PPS和10MHz在數百微秒內緊密同步;
- Linux操作系統:對于實時應用程序,建議在Windows上使用Linux,Linux應配置為使用精確時間協議(PTP)將時鐘與分布式時鐘同步;
- 虹科Orolia Skydel HIL客戶端:這是一個提供簡單API的庫,虹科Orolia Skydel HIL客戶端需要以太網連接,大多數命令使用TCP/IP,真實位置數據使用UDP;
- 虹科Orolia GSG-8或類似的自定義硬件來運行Skydel,虹科Orolia GSG-8預先配置了Linux以獲得最佳性能。
Q5:使用零有效延遲功能時,Skydel會將位置推斷到未來多遠?
Orolia Skydel使用先進的技術來利用CPU和GPU的處理能力,其成本僅僅是幾毫秒的小延遲,稱為引擎延遲。另一個延遲來自HIL模擬器發送接收器軌跡樣本的速率和網絡延遲本身,推薦HIL模擬器在單獨的計算機上運行,為了補償累積的延遲源,Skydel的經驗法則是在未來使用時間偏移進行外推,時間偏移是引擎延遲、HIL采樣間隔和網絡延遲的總和,由Skydel中的Tjoin參數表示,并由用戶進行配置。
Q6:可以在Skydel中禁用軌跡外推嗎?
可以,可以選擇提供未來的位置,以便Skydel在采樣之間進行插值,而不是實時向模擬器提供當前位置。
Q7:Skydel軟件是否提供HIL測試選項?
是的,我們提供可選軟件許可證。
Q8:虹科Orolia Skydel中的HIL測試與其他解決方案有何不同?
虹科Orolia Skydel是最具創新性的GNSS和PNT測試解決方案,它具有非常低的延遲,不需要昂貴的附加組件。最重要的是能夠通過內置測試功能高效設置時間,該功能可快速識別問題并驗證優化性能。HIL圖提供了對HIL子系統集成的洞察,并能夠找到其他解決方案中未量化和未說明的問題。
Q9:選擇模擬器進行HIL測試時,有哪些需要考慮的關鍵因素?
添加HIL和GNSS模擬器后增加的可接受延遲
- HIL模擬器位置更新率
- HIL設置時鐘源
- 可用數據(時間、位置、速度、姿態、角速度等)
Q10:使用HIL選項有哪些優勢?
- 零有效延遲:虹科Orolia Skydel推斷位置以補償延遲
- 使用速度和加速度的外推
- 延遲減少到10ms
- 顯示系統性能的新圖表
-
射頻
+關注
關注
104文章
5575瀏覽量
167705 -
通信
+關注
關注
18文章
6029瀏覽量
135957 -
無線通信
+關注
關注
58文章
4565瀏覽量
143505 -
GNSS
+關注
關注
9文章
767瀏覽量
47908 -
自動駕駛
+關注
關注
784文章
13787瀏覽量
166408
發布評論請先 登錄
相關推薦
如何判斷產品需不需要做AT&T認證?AT&T測試內容和要求分享

北美運營商AT&amp;amp;T認證中的VoLTE測試項
視覺傳感器 | 這些常見的Q&;amp;amp;A!今天統一回答!

智能讀碼器Q&;amp;amp;A | 常見疑問解答,你想知道的都在這!

北美運營商AT&amp;amp;T認證的費用受哪些因素影響

onsemi LV/MV MOSFET 產品介紹 &amp;amp; 行業應用

思瑞浦車規級產品矩陣,全面覆蓋汽車級CAN&amp;amp;LIN、LDO需求

【干貨分享】硬件在環仿真(HiL)測試

逆變器常見問題Q&;amp;A
FS201資料(pcb &amp; DEMO &amp; 原理圖)
北美運營商AT&amp;amp;T認證入庫產品范圍名單相關
解讀北美運營商,AT&amp;amp;T的認證分類與認證內容分享
在TSMaster中加載基于DotNet平臺的Seed&amp;amp;Key







 工商網監
工商網監
評論