 您了解RTK技術嗎?—— 揭秘GNSS中的定位技術
您了解RTK技術嗎?—— 揭秘GNSS中的定位技術
上期文章中我們一起探討了GNSS仿真及其對測試驗證的重要意義,今天我們將一起走進GNSS中的定位技術—RTK技術。什么是RTK技術?傳統RTK技術與網絡RTK技術又有什么區別呢?
隨著GNSS系統的迅速發展,RTK技術由于可以在作業區域內提供實時的厘米級定位精度,在自動駕駛、無人機、精準農業和工業機器人等方面得到了廣泛的應用。RTK技術全稱為RTK(Real-time kinematic,實時動態)載波相位差分技術,是一種對GNSS進行輔助的技術。
GNSS衛星之所以能夠對地球的終端進行定位,依靠的其實是三維坐標系,通過四顆衛星分別計算各個衛星與終端的距離△L,組成四個方程組后進行計算,分別得到經度、緯度、高程和時間。通過單位時間的位置變化,計算出終端的速度,三維坐標以及時間信息。
然而,衛星定位是存在誤差的,誤差既來自系統的內部,也來自外部。例如衛星信號穿透電離層和對流層時產生的誤差,還有衛星高速移動產生的多普勒效應引起的誤差等等,它們影響了系統的準確性和可靠性。為了更好地消除誤差、提高定位精度,即出現了RTK定位技術。
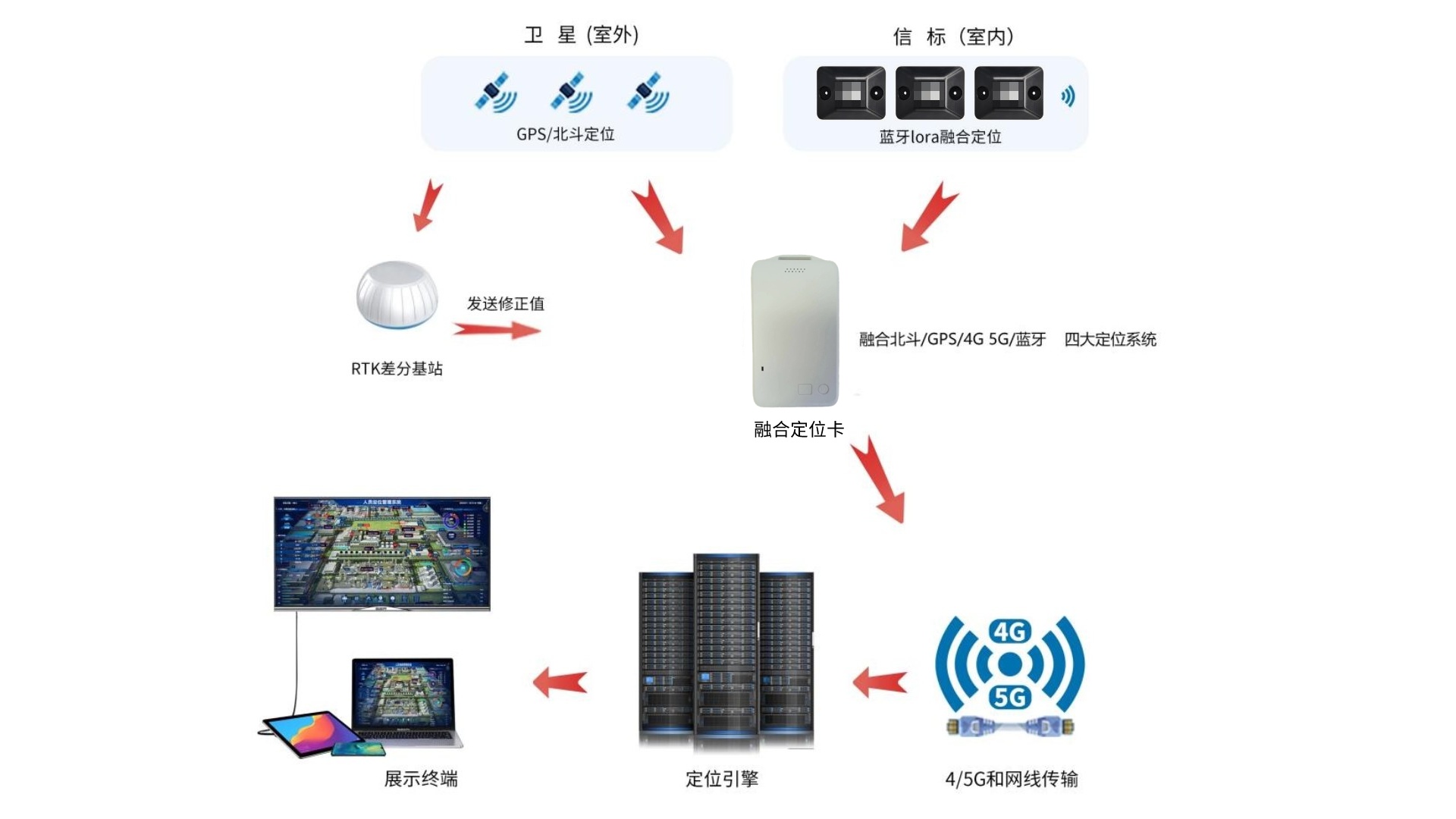
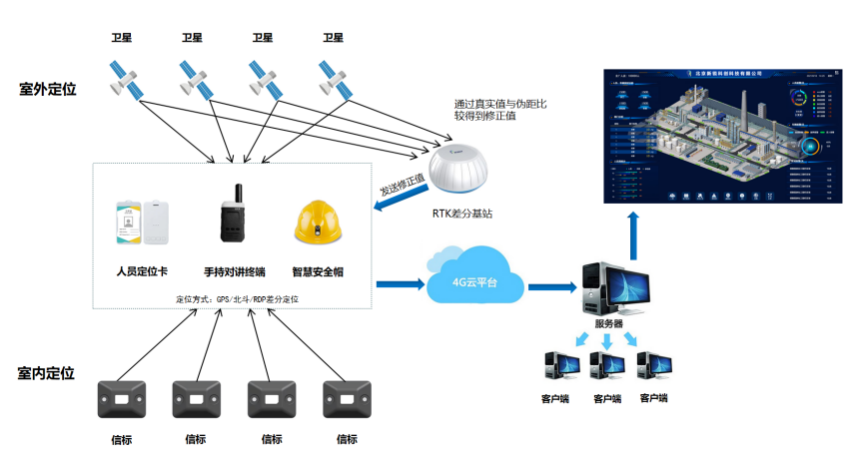
除了衛星之外,RTK系統包括兩個重要組成部分——基準站和流動站,這兩個站都帶有衛星接收機,可以觀測和接收衛星數據。定位過程如下:
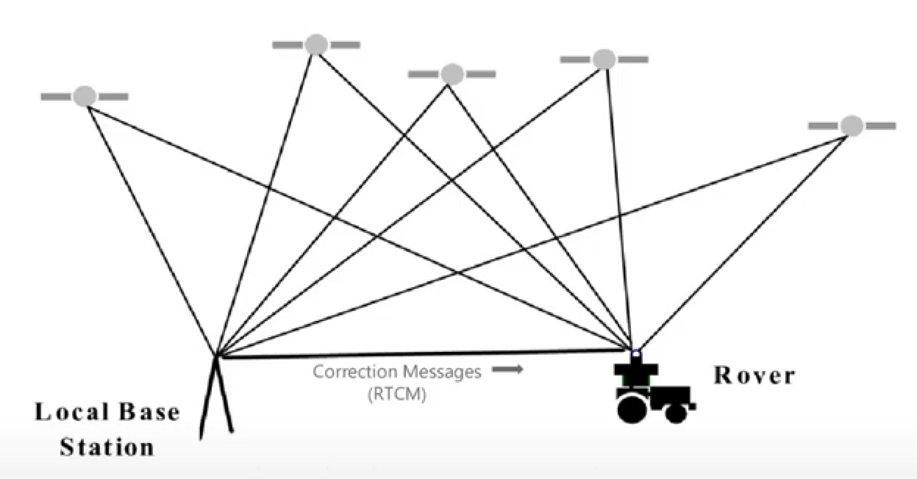
- 基準站先觀測和接收衛星數據;
- 基準站通過旁邊的無線電臺(數據鏈),將觀測數據實時發送給流動站(距離一般不超過20公里);
- 流動站收到基準站數據的同時,也觀測和接收了衛星數據;
- 流動站在基準站數據和自身數據的基礎上,根據相對定位原理,進行實時差分運算,從而解算出流動站的三維坐標及精度,其定位精度可達1cm~2cm。即完成定位。
以上所述的定位技術是傳統的RTK技術,它存在一個問題:流動站和基準站之間存在距離限制。為了解決這個問題,即出現了網絡RTK技術。網絡RTK相比于傳統RTK是用區域型的GNSS網絡誤差模型取代了單點GNSS誤差模型。
網絡RTK用多個基準站組成基準站網,它們將數據發給中央服務器。中央服務器會根據數據模擬出一個“虛擬基準站”,因此,網絡RTK也被稱為“虛擬基準站技術”。對于流動站來說,它只會看到這個“虛擬基準站”,基于這個“虛擬基準站”發來的數據完成最終的測量運算。
在網絡RTK的模型中,網絡的穩定性對定位精度影響極大,必須保證網絡通信穩定,從而確保差分數據穩定傳輸,才能實現超高定位精度。目前許多GNSS模擬器中也能通過RTCM消息生成虛擬基站。

虹科Orolia GSG-8高級模擬器基于Skydel模擬引擎,具有高級干擾和欺騙模擬選項,用于在實際條件下進行測試。虹科Orolia Skydel軟件還能夠按需求進行定制開發,以提高全球導航衛星系統接收器測試的準確性和完整性。虹科提供專門設計和制造的模擬解決方案,以滿足多種最新應用的要求,從而以高精度進行GNSS信號的接收測試,并帶來以下三種解決方案:
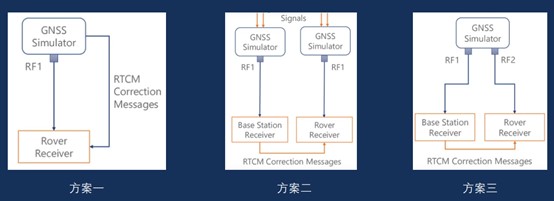
方案一: 通過一臺模擬器進行,在GNSS模擬器中模擬衛星信號,轉化為射頻信號后由流動接收機進行接收,同時串行傳輸RTCM消息給接收機,從而計算出高精度的定位,但是這種方案一般應用于已知接收機有RTK的功能。
方案二:使用兩臺GNSS模擬器,創建相同的模擬,需要同時使用同一個時鐘源讓它們實現同步,然后同樣把衛星信號轉化為射頻信號,一個傳送給基準站接收機,另一個送給流動站接收機,同時基準站接收機會發送RTCM消息給流動站,然后流動站計算,實現高精度定位。
方案三: 使用同一個模擬器創建模擬,可以不使用同步,兩路信號同樣一個給基站,一個給流動站;然后基站再發送RTCM消息給流動站,流動站計算,實現高精度定位。
-
射頻
+關注
關注
104文章
5574瀏覽量
167695 -
通信
+關注
關注
18文章
6026瀏覽量
135950 -
無線通信
+關注
關注
58文章
4564瀏覽量
143498 -
衛星
+關注
關注
18文章
1712瀏覽量
67007 -
微波
+關注
關注
16文章
1043瀏覽量
83685
發布評論請先 登錄
相關推薦
巍泰技術 UWB 信標系統定位技術與 GPS/RTK/RFID/WiFi 等技術優勢對比

工地UWB+北斗RTK人員定位系統方案的原理、特點、功能及應用

GNSS RTK差分基準站是什么?RTK差分基站應用在哪些領域?

GPS/北斗RTK差分定位系統的技術原理以及應用領域
AT372-6P杭州中科微GNSS單頻RTK高精度定位模塊datasheet

化工廠室外GPS 北斗RTK差分人員定位系統解決方案
北斗RTK高精度定位系統介紹
藍牙+LoRa+北斗RTK融合定位系統介紹
5分鐘讀懂GPS-RTK實時動態技術,建議收藏!
移遠通信推出“全系統+全頻段”高精度GNSS定位模組LG290P
移遠通信推出工規級RTK高精度GNSS定位模組LG290P
如何利用GSG-721與ublox GNSS接收機實現RTK功能仿真?





 工商網監
工商網監
評論