") 【產(chǎn)品應(yīng)用】手把手帶你使用ZMC300E繪圖
【產(chǎn)品應(yīng)用】手把手帶你使用ZMC300E繪圖
面對(duì)一臺(tái)ZMC300E運(yùn)動(dòng)控制器,我們?cè)撛鯓幼屗ぷ髌饋?lái)?本文帶你了解其核心算法原理,并詳細(xì)講解如何操縱龍門架畫筆平臺(tái)繪圖。
 ?前言
?前言
ZMC300E(點(diǎn)擊了解詳情)是廣州致遠(yuǎn)電子股份有限公司開(kāi)發(fā)的最新一代智能總線型 EtherCAT 主站控制器,使用A8內(nèi)核的AM335X為處理器核心,配合Xenomai高實(shí)時(shí)性Linux系統(tǒng),支持作為EtherCAT主站使用,其通訊可實(shí)現(xiàn)ms周期任務(wù)抖動(dòng)±15μs以內(nèi),可滿足運(yùn)動(dòng)控制器的高實(shí)時(shí)性要求。
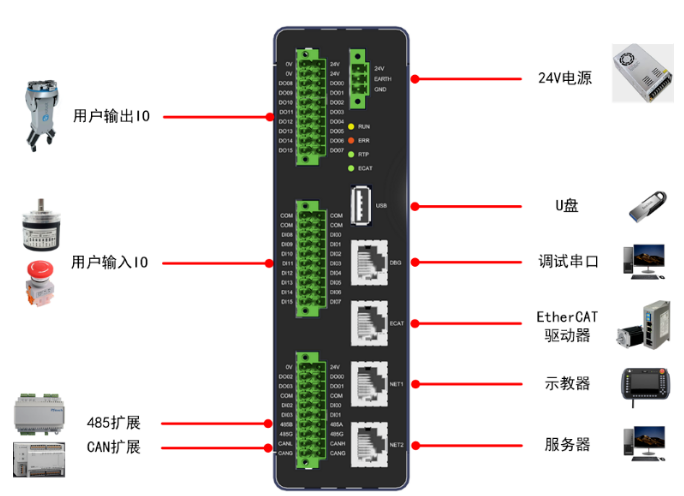 圖1ZMC300E控制器
圖1ZMC300E控制器
可以看到,運(yùn)動(dòng)控制器的強(qiáng)項(xiàng)是EtherCAT實(shí)時(shí)通信,主要工作就是發(fā)號(hào)施令,通過(guò)網(wǎng)絡(luò)命令多個(gè)電驅(qū)和電機(jī)工作。通俗的說(shuō),運(yùn)動(dòng)控制器干腦力活,動(dòng)口不動(dòng)手,電驅(qū)和電機(jī)干體力活,專干重活累活。
那么,運(yùn)動(dòng)控制器憑什么當(dāng)上智力擔(dān)當(dāng)?shù)模吭瓉?lái)運(yùn)動(dòng)控制器是計(jì)算能手,擁有三大絕活算法:軌跡插補(bǔ),速度規(guī)劃,運(yùn)動(dòng)前瞻。憑借這三大絕活,運(yùn)動(dòng)控制器就能指揮電驅(qū)和電機(jī)完成各種運(yùn)動(dòng)任務(wù)。
?算法原理
接下來(lái)簡(jiǎn)單地介紹運(yùn)動(dòng)控制器的三大絕活算法:軌跡插補(bǔ),速度規(guī)劃,運(yùn)動(dòng)前瞻。這三大算法包含較多子類別的算法,本文只對(duì)最基礎(chǔ)最實(shí)用的子算法進(jìn)行介紹,后面實(shí)戰(zhàn)繪圖也會(huì)用到這些算法:軌跡插補(bǔ)-直線插補(bǔ),速度規(guī)劃-梯形速度規(guī)劃,運(yùn)動(dòng)前瞻-拐角減速。1.軌跡插補(bǔ)運(yùn)動(dòng)任務(wù)的核心任務(wù)就是繪制各種軌跡,運(yùn)動(dòng)控制器的看家本領(lǐng)就是軌跡插補(bǔ)。插補(bǔ)算法根據(jù)給定的信息進(jìn)行數(shù)字計(jì)算,不斷計(jì)算出參與運(yùn)動(dòng)的各坐標(biāo)軸的進(jìn)給指令,然后分別驅(qū)動(dòng)各自相應(yīng)的執(zhí)行部件產(chǎn)生協(xié)調(diào)運(yùn)動(dòng),以使被控機(jī)械部件按理想的路線與速度移動(dòng)。插補(bǔ)最常見(jiàn)的兩種方式是直線插補(bǔ)和圓弧插補(bǔ)。插補(bǔ)運(yùn)動(dòng)至少需要兩個(gè)軸參與,進(jìn)行插補(bǔ)運(yùn)動(dòng)時(shí),首先需要建立坐標(biāo)系,將規(guī)劃軸映射到相應(yīng)的坐標(biāo)系中,運(yùn)動(dòng)控制器根據(jù)坐標(biāo)映射關(guān)系,控制各軸運(yùn)動(dòng),實(shí)現(xiàn)要求的運(yùn)動(dòng)軌跡。直線運(yùn)動(dòng)的插補(bǔ)示意圖如下,插補(bǔ)運(yùn)動(dòng)中由起始點(diǎn)處沿 X 方向走一小段(給一個(gè)脈沖當(dāng)量軸走一段固定距離),發(fā)現(xiàn)終點(diǎn)在實(shí)際輪廓的下方,則下一條線段沿 Y 方向走一小段,此時(shí)如果線段終點(diǎn)還在實(shí)際輪廓下方,則繼續(xù)沿 Y 方向走一小段,直到在實(shí)際輪廓上方以后,再向 X 方向走一小段,依次循環(huán)類推,直到到達(dá)輪廓終點(diǎn)為止。
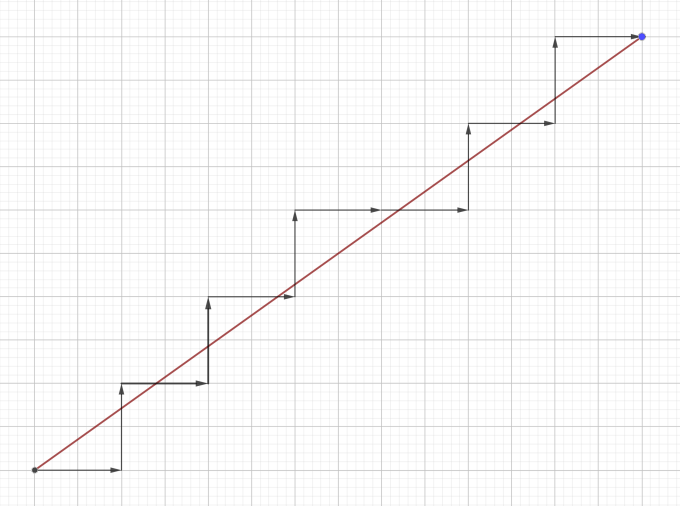
圖2直線插補(bǔ)示意圖除了直線插補(bǔ),ZMC300E還支持多種軌跡插補(bǔ):圓弧插補(bǔ),橢圓弧插補(bǔ),漸開(kāi)線插補(bǔ),螺旋線插補(bǔ),貝塞爾曲線插補(bǔ)。2.速度規(guī)劃運(yùn)動(dòng)控制器還可以為軌跡插補(bǔ)賦予速度規(guī)劃。速度規(guī)劃這里特指,在已知運(yùn)動(dòng)的起點(diǎn)和終點(diǎn)和完整路徑的情況下,基于給定的時(shí)間約束, 最大速度約束和最大加速度減速度約束的條件,設(shè)計(jì)運(yùn)動(dòng)速度隨時(shí)間的曲線。常見(jiàn)的速度規(guī)劃算法有梯形速度規(guī)劃算法,S形速度規(guī)劃算法。梯形速度曲線,也稱為直線加減速或T型加減速。其算法十分簡(jiǎn)易,規(guī)劃周期耗時(shí)短,有利于縮減系統(tǒng)的連續(xù)運(yùn)行時(shí)間,從而提高系統(tǒng)的運(yùn)動(dòng)控制速度,實(shí)施起來(lái)比較容易,應(yīng)用廣泛。
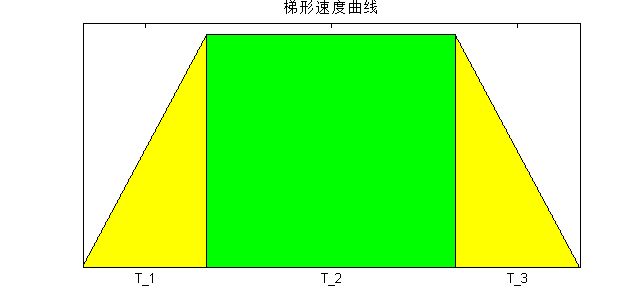
圖3梯形速度規(guī)劃-速度示意圖
該速度由3段組成,第一個(gè)段黃色段是加速段,第二段(綠色段)是勻速段,第三段(黃色段)是減速段。
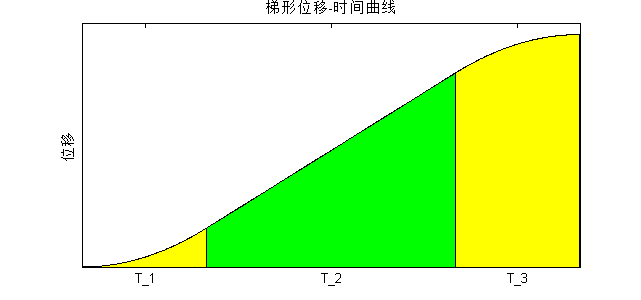
圖4梯形速度規(guī)劃-位移示意圖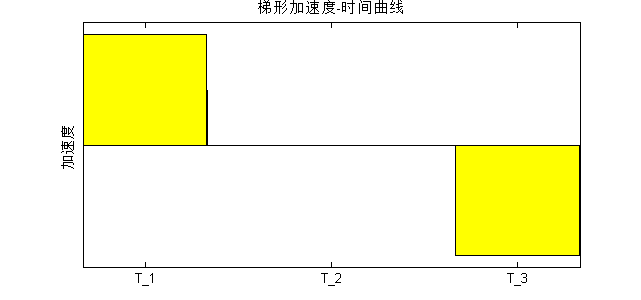 圖5梯形速度規(guī)劃-加速度示意圖
圖5梯形速度規(guī)劃-加速度示意圖
除了梯形速度規(guī)劃,ZMC300E還支持多種S型速度規(guī)劃:加加速度(二次加速度)給定條件的S型速度規(guī)劃,彎曲時(shí)間給定條件的S型速度規(guī)劃,和加減速時(shí)間和彎曲時(shí)間給定條件的S型速度規(guī)劃。
3.運(yùn)動(dòng)前瞻
運(yùn)動(dòng)控制器能夠更加高效規(guī)劃運(yùn)動(dòng),這要求運(yùn)動(dòng)控制器支持連續(xù)插補(bǔ)運(yùn)動(dòng),支持運(yùn)動(dòng)前瞻。
這里給一個(gè)矩形繪圖作為連續(xù)插補(bǔ)的示例。一個(gè)普通的矩形軌跡如下圖。
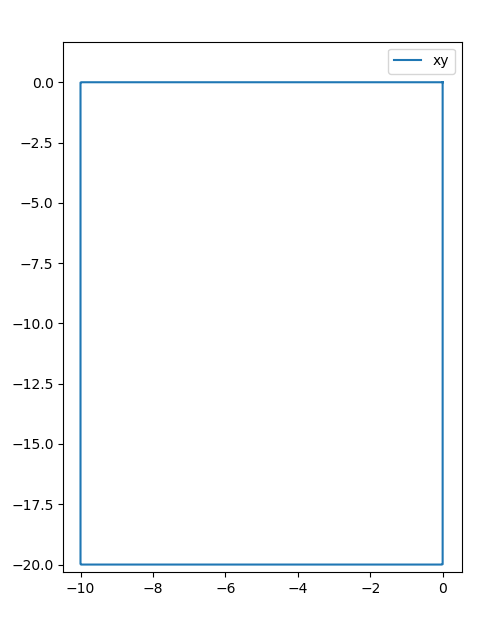
圖6矩形軌跡該矩形含有四段軌跡。
使用梯形速度規(guī)劃,可以得到以下的速度曲線,可以看到,由4段曲線組成。
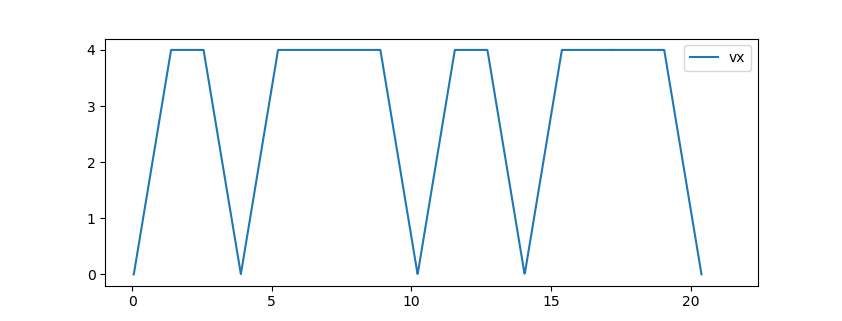 圖7不開(kāi)啟運(yùn)動(dòng)前瞻的速度-時(shí)間示意圖不開(kāi)啟連續(xù)插補(bǔ)和運(yùn)動(dòng)前瞻,每段速度都減速到零。縱軸為速度,橫軸為時(shí)間。下圖是開(kāi)啟連續(xù)插補(bǔ)的速度-時(shí)間圖。速度是通過(guò)位置和發(fā)射時(shí)間推算出來(lái)的,不完全精確,速度出現(xiàn)毛刺是正常的。
圖7不開(kāi)啟運(yùn)動(dòng)前瞻的速度-時(shí)間示意圖不開(kāi)啟連續(xù)插補(bǔ)和運(yùn)動(dòng)前瞻,每段速度都減速到零。縱軸為速度,橫軸為時(shí)間。下圖是開(kāi)啟連續(xù)插補(bǔ)的速度-時(shí)間圖。速度是通過(guò)位置和發(fā)射時(shí)間推算出來(lái)的,不完全精確,速度出現(xiàn)毛刺是正常的。
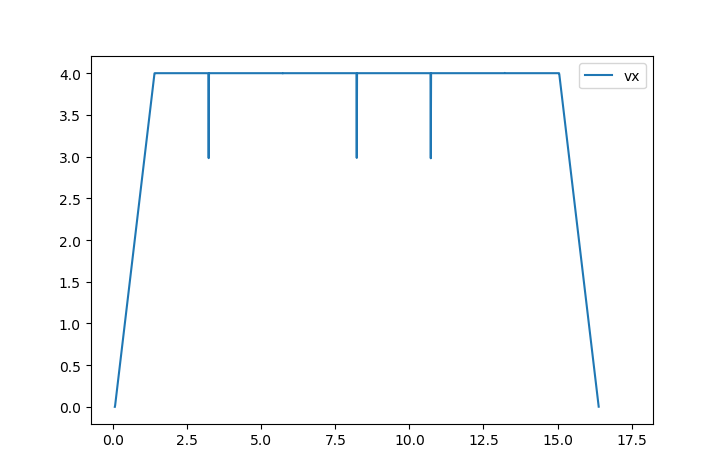
圖8連續(xù)插補(bǔ)速度-時(shí)間示意圖
開(kāi)啟連續(xù)插補(bǔ),每段速度不再減速到0。可以看到,時(shí)間相比不開(kāi)啟運(yùn)動(dòng)前瞻更短。但是有個(gè)嚴(yán)重問(wèn)題:拐角處的速度是最大值,過(guò)高的速度可能影響電機(jī)和刀具穩(wěn)定性。
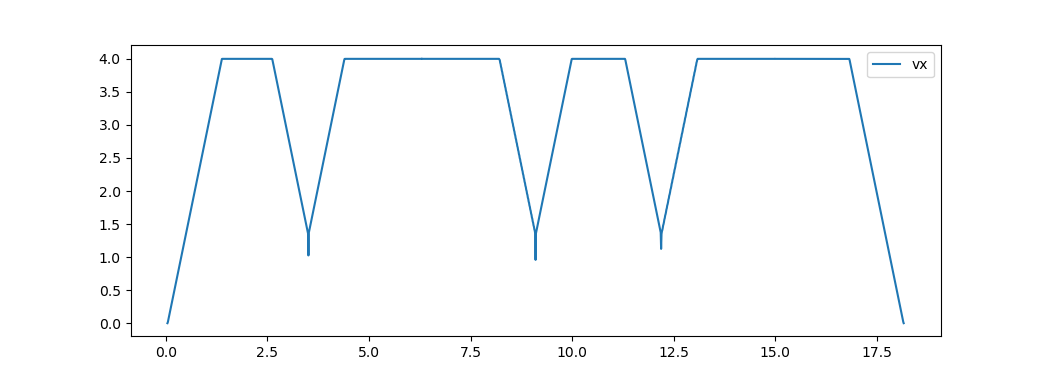
圖9運(yùn)動(dòng)前瞻速度-時(shí)間示意圖
開(kāi)啟連續(xù)插補(bǔ)和運(yùn)動(dòng)前瞻,拐角減速,每段速度不再減速到0,而是根據(jù)拐角角度決定速度。可以看到,時(shí)間相比不開(kāi)啟運(yùn)動(dòng)前瞻更短,相比連續(xù)插補(bǔ)更長(zhǎng),避免刀具高速通過(guò)拐角處的問(wèn)題。
運(yùn)動(dòng)控制器的運(yùn)動(dòng)前瞻功能可以根據(jù)用戶的運(yùn)動(dòng)路徑自動(dòng)計(jì)算出平滑的速度規(guī)劃,以防止軌跡的拐角處速度過(guò)快。運(yùn)動(dòng)前瞻包括三種模式:拐角減速、倒角、小圓限速,而這三種模式也可混合使用。拐角減速會(huì)根據(jù)夾角大小確定拐角處的最大速度,倒角則會(huì)設(shè)置前后兩個(gè)軌跡在拐角處的倒角,而小圓限速則會(huì)對(duì)半徑小于設(shè)置值的圓弧軌跡進(jìn)行限速。
?實(shí)戰(zhàn)繪圖
介紹完了算法原理,接下來(lái)我們使用ZMC300E運(yùn)動(dòng)控制器來(lái)進(jìn)行實(shí)戰(zhàn)繪圖。
首先把運(yùn)動(dòng)控制器和畫筆平臺(tái)使用網(wǎng)線連接。畫筆平臺(tái)是一個(gè)3軸的龍門架,可以在xyz三軸空間移動(dòng),夾具上只有一根常見(jiàn)的鉛筆。
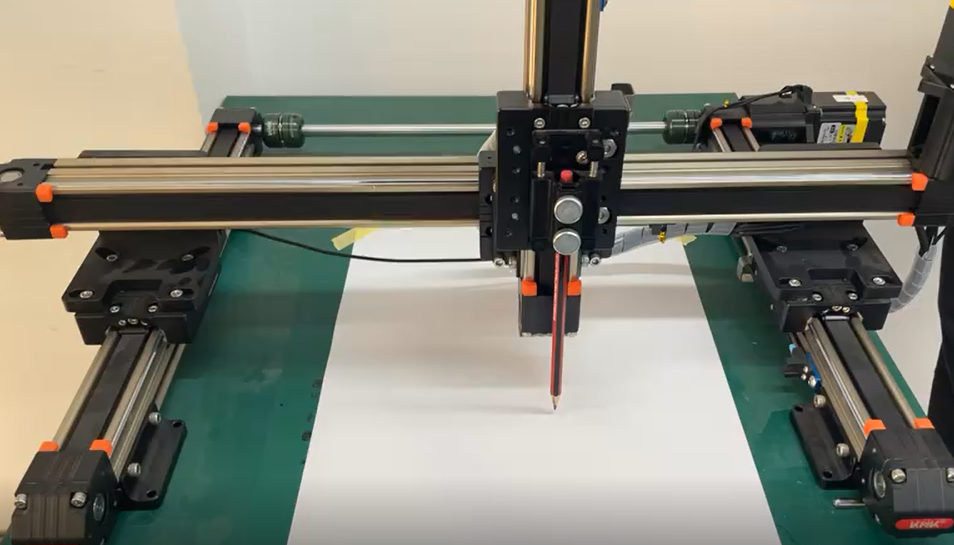
圖10畫筆平臺(tái)
選擇一幅SVG格式圖片作為我們畫圖的圖案,這里我們選擇的是致遠(yuǎn)電子公司的logo圖片。

圖11Logo圖片
對(duì)于輸入圖片,我們可以把矢量圖解析成多個(gè)筆畫,每個(gè)筆畫解析成直線曲折相連,這樣就可以得到對(duì)應(yīng)繪圖軌跡。G代碼(G-code)是最為廣泛使用的計(jì)算機(jī)數(shù)控編程語(yǔ)言,主要在計(jì)算機(jī)輔助制造中用于控制自動(dòng)機(jī)床。
我們使用開(kāi)源工具svg_to_gcode,把svg文件轉(zhuǎn)成G代碼文件。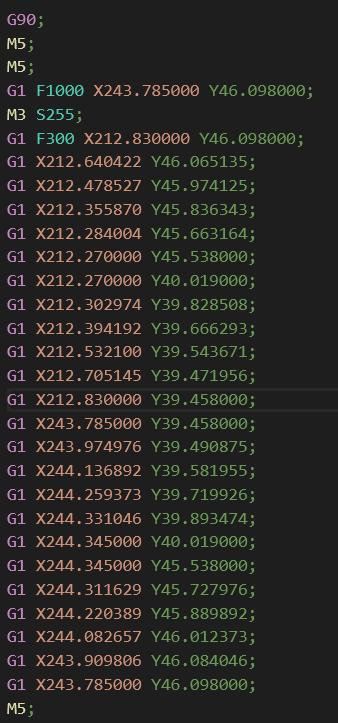
圖12G代碼文件
查看G代碼文件,可以看到都是G1指令,說(shuō)明都是直線插補(bǔ)命令。這說(shuō)明我們只用直線插補(bǔ)命令就能完成繪圖。對(duì)應(yīng)的繪圖圖案如下,不同的顏色對(duì)應(yīng)不同的筆劃,可以看到圖片包含十八筆的仿真筆畫圖。
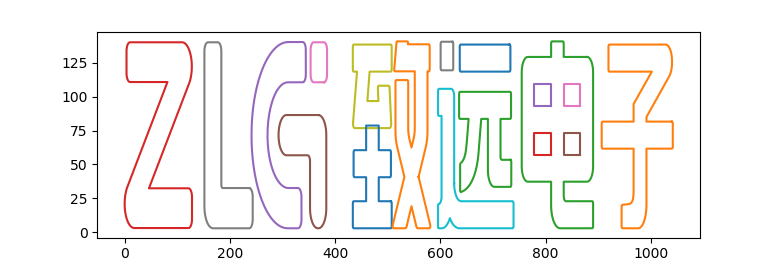
圖13 筆畫軌跡圖片
每一筆劃都要有進(jìn)筆(筆尖觸及紙張),作畫(筆尖寫字)和退筆(筆尖遠(yuǎn)離紙張)。G代碼中進(jìn)筆對(duì)應(yīng)M3指令(進(jìn)刀),退筆對(duì)應(yīng)M5指令(退刀)。這樣才能書寫多個(gè)筆劃。
目標(biāo)圖形總共有十八筆的筆畫,要想作畫就得先對(duì)筆畫進(jìn)行排序。這里使用最直觀的筆劃排序算法,先左后右,先上后下。
加入筆畫的連接,可以得到以下的筆畫仿真繪圖。
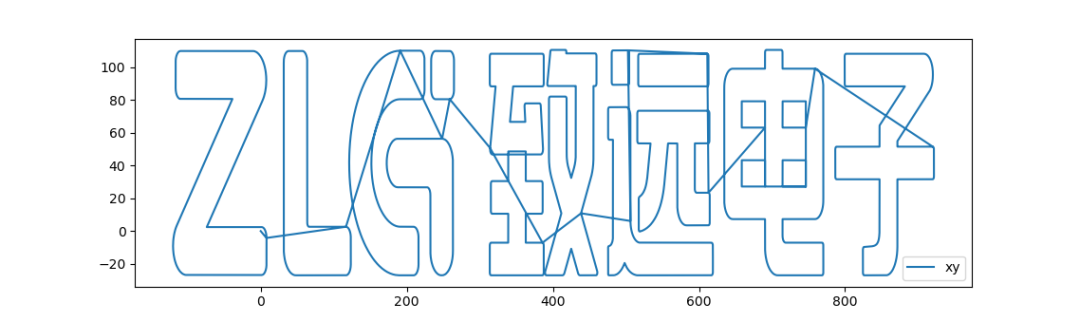
圖14 連筆筆畫繪圖
可以看到,仿真效果大體上符合我們的預(yù)期。我們就可以在運(yùn)動(dòng)控制器中運(yùn)行G代碼腳本。使用ssh連接運(yùn)動(dòng)控制器,啟動(dòng)控制程序。設(shè)置左下方為原點(diǎn),沿著紙張往右邊寫字,紙張寬度至少280mm,高度60mm。使用梯形速度規(guī)劃,配置最大速度100mm/s,最大加速度和最大減速度為100mm/s^2。進(jìn)筆和退筆,對(duì)應(yīng)z軸上下的運(yùn)動(dòng),進(jìn)筆量和退筆量都設(shè)為10mm。為了提高繪圖效率,開(kāi)啟了連續(xù)插補(bǔ),運(yùn)動(dòng)前瞻和拐角減速。
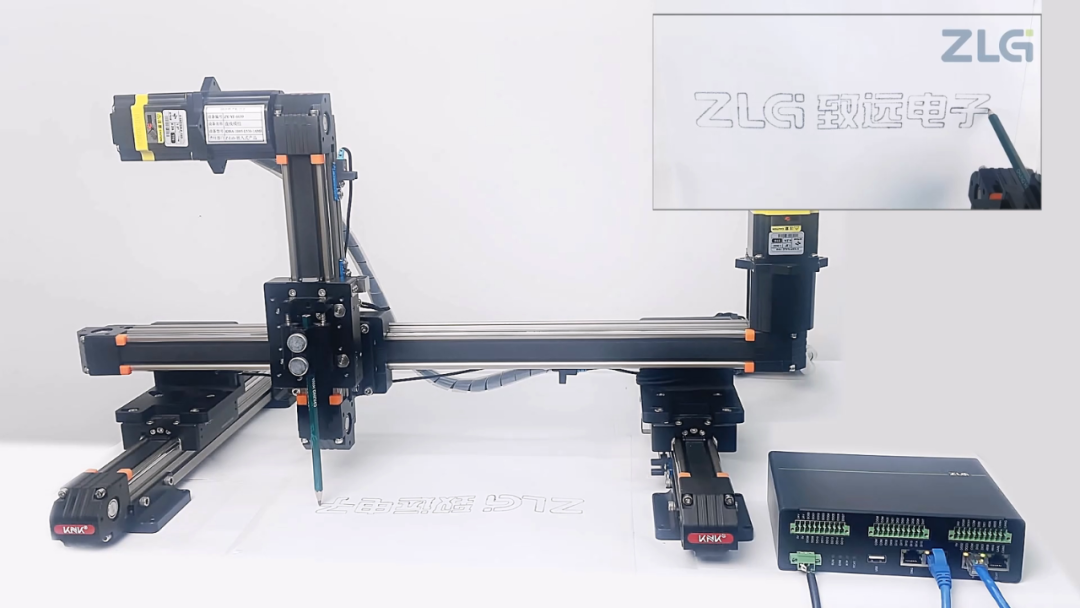
圖15 繪圖可以看到,我們使用ZMC300E控制器漂亮地完成了繪圖。
-
控制器
+關(guān)注
關(guān)注
112文章
16347瀏覽量
177905 -
Linux
+關(guān)注
關(guān)注
87文章
11298瀏覽量
209396
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
源碼開(kāi)放 智能監(jiān)測(cè)電源管理教程寶典!
Air780E模組LuatOS開(kāi)發(fā)實(shí)戰(zhàn) —— 手把手教你搞定數(shù)據(jù)打包解包

第14章-藍(lán)牙遙控小車 藍(lán)牙串口通訊講解藍(lán)牙APP遙控小車 藍(lán)牙串口通訊講解
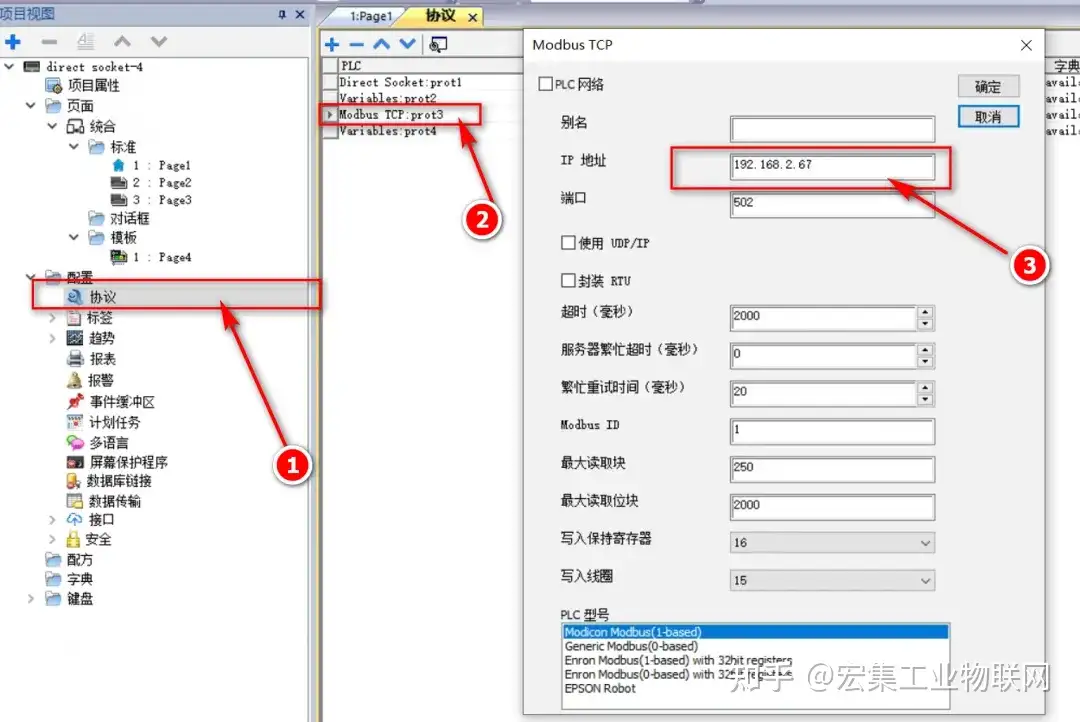
手把手教你通過(guò)宏集物聯(lián)網(wǎng)工控屏&網(wǎng)關(guān)進(jìn)行協(xié)議轉(zhuǎn)換,將底層PLC/傳感器的數(shù)據(jù)轉(zhuǎn)換為TCP協(xié)議并傳輸?shù)接脩?/a>
工商業(yè)儲(chǔ)能選型指南及參數(shù)詳解

手把手教你在orcad中設(shè)置CIS元器件數(shù)據(jù)庫(kù),提高工作效率

手把手教你排序算法怎么寫

手把手帶你移植HAL庫(kù)函數(shù)
ZMC900E控制器之ROS2環(huán)境安裝指南

ZMC900E 國(guó)產(chǎn)EtherCAT主站控制器 — 電源口傳導(dǎo)騷擾整改
【先楫HPM5361EVK開(kāi)發(fā)板試用體驗(yàn)】(原創(chuàng))5.手把手實(shí)戰(zhàn)AI機(jī)械臂
【飛騰派4G版免費(fèi)試用】4.手把手玩轉(zhuǎn)QT界面設(shè)計(jì)
工程送樣!手把手教你用好廣和通RedCap模組FG131&amp;FG132系列






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論