 經緯恒潤榮膺2022年度中國港口協會科學技術獎一等獎!
經緯恒潤榮膺2022年度中國港口協會科學技術獎一等獎!
近日,2022年度中國港口協會科學技術獎評終審答辯會在青島圓滿閉幕,經緯恒潤和山東港口日照港集裝箱發展有限公司共同申報的“順岸開放式全自動化集裝箱碼頭集卡無人駕駛關鍵技術研究和應用”獲得2022年度中國港口協會科技進步獎一等獎。


中國港口協會科學技術獎設立于2006年,是經科學技術部批準、國家科學技術獎勵工作辦公室第35號公告公布準予設立的獎項。該獎項每年評審一次,是國內港口行業最具權威性的科技獎項。
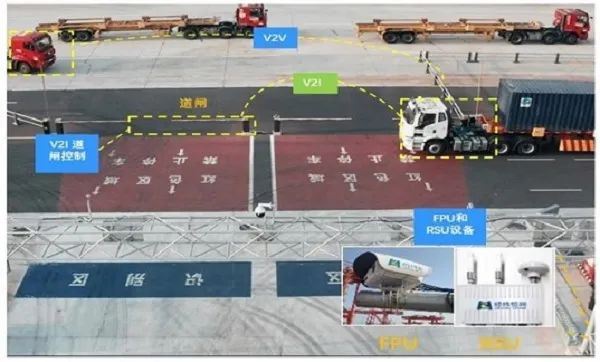
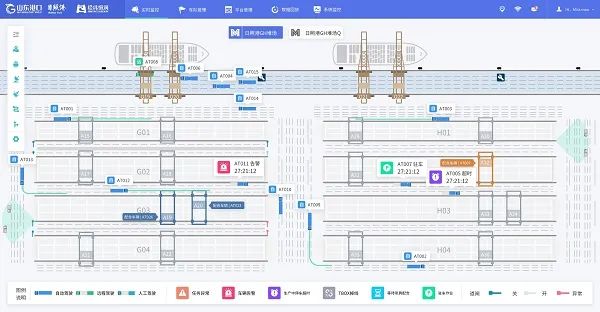
此項目以全球首個順岸開放式自動化集裝箱碼頭為基礎,經緯恒潤在此項目中提供了包含了車、路、網、云、圖等全棧無人集卡車隊系統解決方案:車端基于線控底盤的自動駕駛整車SOA架構設計、車規級智能網聯硬件、自動駕駛感知-規劃-控制算法,路側V2X車路協同系統,5G遠程駕駛系統,云端車隊調度管理系統FMS和數據后臺、高精地圖以及數字孿生,信息安全等整體解決方案,并將以上系統與港口既有業務和控制系統(TOS、ECS等)進行了數據對接和邏輯匹配,形成完整統一的無人水平運輸生產運營系統。
經過和日照港一年多共同攻關,本項目主要解決的問題和創新點如下:
1.生產工藝方面,針對順岸式碼頭水平運輸路線交匯復雜性場景,提出了采用雙懸臂內外集卡分離以及道閘分時隔離的工藝,保障有人外集卡和無人內集卡的安全混行和高效運行。
2.無人駕駛穩定性方面,針對無人集卡重載震動大,作業時沖擊大,以及無人集卡重載行駛過程中工控機穩定性不足等挑戰,此項目采用了符合汽車質量標準的車規級高可靠的自動駕駛域控制器。

3.網絡安全性方面,針對集裝箱碼頭復雜的電磁環境,以及由于大型港機設備對于5G信號形成的隧道效應造成的5G信號中斷等問題,項目采用精準5G覆蓋以及全場部署電磁干擾監測及尋源系統,保障5G通信鏈路安全可靠。

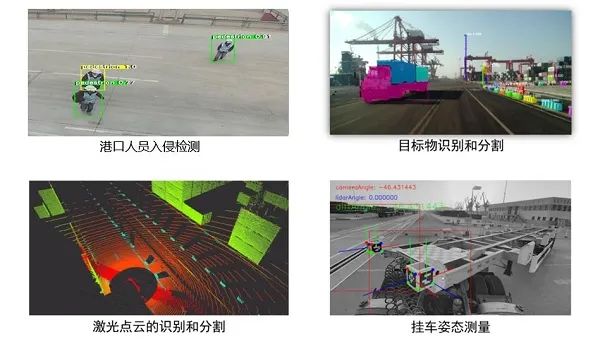
4.精準定位方面,針對港口復雜環境下精準定位由于雨雪大霧等惡劣天氣的影響,以及岸橋等港機對衛星定位信號的遮擋,項目部署了自研UWB高精定位系統,以及自建RTK定位服務和V2X及激光定位多種融合定位系統,實現2厘米以內定位精度,保障作業效率和安全。

5.安全性方面,針對因無人集卡的非剛體連接重載時集裝箱安全,項目開發了無人集卡掛車角度識別,可實現運行過程中的掛車姿態監測保障運行安全。同時開發了全場V2X行人入侵感知系統,保障全場運營安全性,通過5G遠程駕駛接管一些極端場景,可保障全流程生產作業安全。
6.自動駕駛效率方面,針對如何避免“橋等車”等影響效率問題,以及確保最優行駛路線路徑規劃,項目開發了智能車隊調度管理系統,首創無人集卡車和平板車混合調度,以及基于AI的箱體檢測提前發現貨物問題并處理,結合V2X和道閘的意圖識別,提前抬桿,魚貫通行,將外集卡納入總體調度范圍,多種技術綜合提升總體作業效率。

近年來,經緯恒潤持續深耕港口無人駕駛領域,先后在唐山港、日照港、龍拱港落地運營無人駕駛項目。2021年7月,經中國港口協會審核批準,經緯恒潤正式加入中國港口協會,成為其會員單位!
未來,經緯恒潤將再接再厲,不斷打磨產品和應用場景,踏踏實實做好每一個項目,繼續為客戶提供更高質量的產品和優質的服務,和客戶共同致力于打造智慧港口、綠色港口的目標而努力!
-
無人駕駛
+關注
關注
98文章
4054瀏覽量
120447 -
經緯恒潤
+關注
關注
1文章
316瀏覽量
1885
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論