


以CW32L083為例,其定時器分為6種:
基本定時器:CW32L083 內部集成 3 個基本定時器 (BTIM),每個 BTIM 完全獨立且功能完全相同,各包含一個 16bit 自動重裝 載計數器并由一個可編程預分頻器驅動。BTIM 支持定時器模式、計數器模式、觸發啟動模式和門控模式 4 種工作模式,支持溢出事件觸發中斷請求和 DMA 請求。得益于對觸發信號的精細處理設計,使得 BTIM 可以由硬件自 動執行觸發信號的濾波操作,還能令觸發事件產生中斷和 DMA 請求。
低功耗定時器:CW32L083 內部集成 1 個 16 位低功耗定時器(LPTIM),可以以很低的功耗實現定時或對外部脈沖計數的功能。通過選擇合適的時鐘源和觸發信號,可以實現系統低功耗休眠時將MCU喚醒的功能。LPTIM 內部具有一個比較寄存器,可實現比較輸出和 PWM 輸出,并可以控制輸出波形的極性。此外,LPTIM 還可以與正交編碼器連接,自動 實現遞增計數和遞減計數。
通用定時器:CW32L083 內部集成 4 個通用定時器(GTIM),每個 GTIM 完全獨立且功能完全相同,各包含一個16bit 自動重 裝載計數器并由一個可編程預分頻器驅動。GTIM 支持定時器模式、計數器模式、觸發啟動模式和門控模式 4 種基本工作模式,每組帶4 路獨立的捕獲 / 比較通道,可以測量輸入信號的脈沖寬度(輸入捕獲)或者產生輸出波形(輸出比較和 PWM)。
高級定時器:高級定時器 (ATIM) 由一個 16 位的自動重載計數器和 7 個比較單元組成,并由一個可編程的預分頻器驅動。ATIM 支持 6 個獨立的捕獲 / 比較通道,可實現 6 路獨立 PWM 輸出或 3 對互補 PWM 輸出或對 6 路輸入進行捕獲。可 用于基本的定時 / 計數、測量輸入信號的脈沖寬度和周期、產生輸出波形(PWM、單脈沖、插入死區時間的互補 PWM 等)。
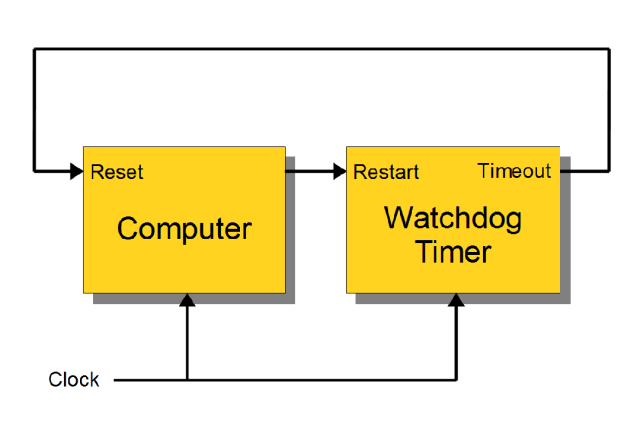
獨立看門狗定時器 (IWDT):CW32L083 內部集成獨立看門狗定時器 (IWDT),使用專門的內部 RC 時鐘源 RC10K,可避免運行時受到外部因素 影響。一旦啟動 IWDT,用戶需要在規定時間間隔內對 IWDT 的計數器進行重載,否則計數器溢出會觸發復位或 產生中斷信號。IWDT 啟動后,可停止計數。可選擇在深度休眠模式下 IWDT 保持運行或暫停計數。專門設置的鍵值寄存器,可以鎖定 IWDT 的關鍵寄存器,防止寄存器被意外修改。
窗口看門狗定時器 (WWDT):CW32L083 內部集成窗口看門狗定時器 (WWDT),用戶需要在設定的時間窗口內進行刷新,否則將觸發系統復位。WWDT 通常被用來監測有嚴格時間要求的程序執行流程,防止由外部干擾或未知條件造成應用程序的執行異常, 導致發生系統故障。
01
CW32定時器中斷
定時器中斷是由CW32中的定時器引起的中斷,所謂中斷就是程序正常順序執行的時候,出現了突發事件,CPU停止當前的程序的執行,轉去處理突發事件,處理完畢后又返回原程序被中斷的位置繼續執行。
02
CW32定時器中斷源
定時器主要中斷源包括如下:
基本定時器(BTIM): 計數器(ARR/TOP)溢出中斷、計數器觸發中斷。
低功耗定時器(LPTIM): 計數方向反向中斷、ARR更新完成中斷、比較寄存器更新完成中斷、計數器觸發中斷、ARR自動重載匹配中斷、比較匹配中斷。
通用定時器(GTIM): 編碼器計數方向變化中斷、CHx捕獲比較中斷、計數器下溢中斷、計數器觸發中斷、計數器ARR溢出中斷。
高級定時器(ATIM): CHxA/B捕獲比較中斷、CHxA/B捕獲數據丟失中斷、計數器上溢中斷、計數器下溢中斷、剎車中斷、CH4比較匹配中斷、事件更新中斷。
更新事件, 觸發事件。
獨立看門狗定時器(IWDT): 計數器溢出中斷。
窗口看門狗定時器(WWDT):計數器溢出中斷。
各中斷源的含義詳細描述參見對應產品的用戶手冊內容。
03
實際操作
以CW32L083為例,控制基本定時器BTIM1以固定的時間間隔產生中斷,并在ARR溢出中斷中控制口線電平翻轉。
1. RCC時鐘初始化
void RCC_Configuration(void)
{
RCC_HSI_Enable(RCC_HSIOSC_DIV6);
//系統時鐘設置為HSI時鐘6分頻,8MHz, PCLK、HCLK不分頻,PCLK=HCLK=SysClk=8MHz
__RCC_BTIM_CLK_ENABLE();
__RCC_GPIOB_CLK_ENABLE();
}2.初始化GPIO口
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.IT = GPIO_IT_NONE;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pins = GPIO_PIN_8;
GPIO_Init(CW_GPIOB, &GPIO_InitStruct);
}3.配置嵌套矢量中斷控制器
void NVIC_Configuration(void)
{
__disable_irq();
NVIC_EnableIRQ(BTIM1_IRQn);
__enable_irq();
} 4.主函數
int32_t main(void)
{
BTIM_TimeBaseInitTypeDef BTIM_TimeBaseInitStruct = {0};
/* System Clocks Configuration */
RCC_Configuration();
/* NVIC Configuration */
NVIC_Configuration();
/* GPIO Configuration */
GPIO_Configuration();
BTIM_TimeBaseInitStruct.BTIM_Mode = BTIM_Mode_TIMER;
/* 工作模式,00:定時器模式01:計數器模式10:觸發計數模式11:門控計數模式 */
BTIM_TimeBaseInitStruct.BTIM_Period = 49999;
/* 計數重載周期,取值范圍0x0000 到 0xFFFF. */
BTIM_TimeBaseInitStruct.BTIM_Prescaler = 7; // 8分頻
/*8分頻, 預分配系數,取值范圍2的n次冪,n=0,1,2…15 */
BTIM_TimeBaseInit(CW_BTIM1, &BTIM_TimeBaseInitStruct);
//BTIM基本定時器初始化
BTIM_ITConfig(CW_BTIM1, BTIM_IT_OV, ENABLE); // 使能BTIMx的溢出中斷
BTIM_Cmd(CW_BTIM1, ENABLE);
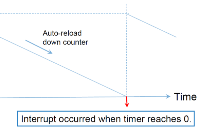
/*BTIM1以1MHz時鐘進行計數,設置ARR寄存器為49999,則BTIM1將每50ms溢出一次,并觸發中斷服務程序。*/
while (1)
{
/* 中斷服務程序中 PB8輸出翻轉 */
}
}5.中斷函數:PB08輸出翻轉
void BTIM1_IRQHandler(void)
{
/* USER CODE BEGIN */
if (BTIM_GetITStatus(CW_BTIM1, BTIM_IT_OV))
// 檢查BTIM的狀態寄存器的各狀態位是否置位
{
BTIM_ClearITPendingBit(CW_BTIM1, BTIM_IT_OV);
// 清除BTIM的狀態寄存器的各狀態位
PB08_TOG();
//PB08口信號翻轉
}
/* USER CODE END */
}6.實驗驗證
示波器檢測PB08口的信號輸出,示波器波形圖呈周期性翻轉。
-
微控制器
+關注
關注
48文章
7981瀏覽量
156585 -
單片機
+關注
關注
6069文章
45070瀏覽量
653685 -
mcu
+關注
關注
146文章
18060瀏覽量
370566 -
國產替代
+關注
關注
0文章
243瀏覽量
2260
發布評論請先 登錄
如何使用新版本J-Flash編程CW32 MCU?
stm32H743定時器溢出的原因?怎么解決?
武漢芯源半導體CW32L010在兩輪車儀表的應用介紹
MCU定時器/計數器
STM32G474HRTIM使用HRTIM配置了主定時器中斷,為啥調試的跳轉到硬件中斷,進不去定時器中斷,為什么?
【S32K 進階之旅】如何使用 S32K3 PIT 定時器實現精準延時?
代碼+案例+生態:武漢芯源半導體CW32嵌入式開發實戰正式出版

代碼+案例+生態:武漢芯源半導體CW32嵌入式開發實戰正式出版
詳解CKS32F107xx系列的定時器同步功能
武漢芯源半導體CW32芯片重慶地區線下技術交流會成功舉辦
看門狗定時器的工作原理





 工商網監
工商網監

評論