 工業相機的組成和原理
工業相機的組成和原理
一.工業CCD的組成:
典型的機器視覺系統可以分為:圖像采集部分、圖像處理部分和運動控制部分。基于PC的視覺系統具體由如下圖所示的幾部分組成:
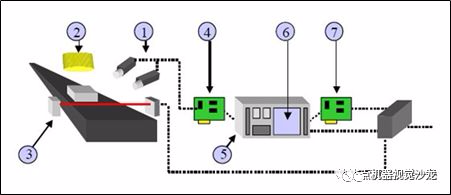
①工業相機與工業鏡頭——這部分屬于成像器件,通常的視覺系統都是由一套或者多套這樣的成像系統組成,如果有多路相機,可能由圖像卡切換來獲取圖像數據,也可能由同步控制同時獲取多相機通道的數據。根據應用的需要相機可能是輸出標準的單色視頻(RS-170/CCIR)、復合信號(Y/C)、RGB信號,也可能是非標準的逐行掃描信號、線掃描信號、高分辨率信號等。
②光源——作為輔助成像器件,對成像質量的好壞往往能起到至關重要的作用(有資料認為,光源對成像起到的作用能占到30%+),各種形狀的LED燈、高頻熒光燈、光纖鹵素燈等都容易得到。
③傳感器——通常以光纖開關、接近開關等的形式出現,用以判斷被測對象的位置和狀態(外部觸發),告知圖像傳感器進行正確的采集。
④圖像采集卡——通常以插入卡的形式安裝在PC中,圖像采集卡的主要工作是把相機輸出的圖像輸送給電腦主機。它將來自相機的模擬或數字信號轉換成一定格式的圖像數據流,同時它可以控制相機的一些參數,比如觸發信號,曝光/積分時間,快門速度等。圖像采集卡通常有不同的硬件結構以針對不同類型的相機,同時也有不同的總線形式,比如PCI、PCI64、Compact PCI,PC104,ISA等。
⑤PC平臺——電腦是一個PC式視覺系統的核心,在這里完成圖像數據的處理和絕大部分的控制邏輯,對于檢測類型的應用,通常都需要較高頻率的CPU,這樣可以減少處理的時間。同時,為了減少工業現場電磁、振動、灰塵、溫度等的干擾,必須選擇工業級的電腦。
⑥視覺處理軟件——機器視覺軟件用來完成輸入的圖像數據的處理,然后通過一定的運算得出結果,這個輸出的結果可能是PASS/FAIL信號、坐標位置、字符串等。常見的機器視覺軟件以C/C++圖像庫,ActiveX控件,圖形式編程環境等形式出現,可以是專用功能的(比如僅僅用于LCD檢測,BGA檢測,模版對準等),也可以是通用目的的(包括定位、測量、條碼/字符識別、斑點檢測等)。
⑦控制單元(包含I/O、運動控制、電平轉化單元等)——一旦視覺軟件完成圖像分析(除非僅用于監控),緊接著需要和外部單元進行通信以完成對生產過程的控制(輸出OK、NG信號)。簡單的控制可以直接利用部分圖像采集卡自帶的I/O,相對復雜的邏輯/運動控制則必須依靠附加可編程邏輯控制單元/運動控制卡來實現必要的動作。
工業相機原理簡述
工業相機其最本質的功能就是將光信號轉變成有序的電信號。選擇合適的相機也是機器視覺系統設計中的重要環節,相機的選擇不僅直接決定所采集到的圖像分辨率、圖像質量等,同時也與整個系統的運行模式直接相關。
1.相機的芯片類型:
一般情況下,工業相機按照論市場主流芯片類型可以分為CCD相機和CMOS相機,當然也有一些其他的芯片,比如富士公司生產的Super CCD芯片。數碼相機的CCD和CMOS都深藏于相機內部,就算有機會看到它們的樣子,也很難進行區分。
CCD芯片工作原理,如圖所示:
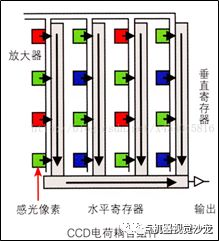
在感光像點接受光照之后,感光元件產生對應的電流,電流大小與光強對應,因此感光元件直接輸出的電信號是模擬的。在CCD傳感器中,每一個感光元件都不對此作進一步的處理,而是將它直接輸出到垂直寄存器,傳到水平寄存器中,最后才能形成統一的輸出。由于感光元件生成的電信號實在太微弱了加上在此過程中會產生大量電壓損耗,無法直接進行模數轉換工作,因此這些輸出數據必須做統一的放大處理—這項任務是由CCD傳感器中的放大器專門負責,經放大器處理之后,每個像點的電信號強度都獲得同樣幅度的增大;因信號只通過一個放大器進行放大,所以產生的噪點較少。但由于CCD本身無法將模擬信號直接轉換為數字信號,因此還需要一個專門的模數轉換芯片進行處理,最終以二進制數字圖像矩陣的形式輸出給專門的DSP處理芯片。
CMOS工作原理,如圖所示:
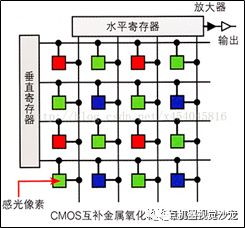
對于CMOS傳感器,上述工作流程就完全不適用了。CMOS傳感器中每一個感光元件都直接整合了放大器和模數轉換邏輯,當感光二極管接受光照、產生模擬的電信號之后,電信號首先被該感光元件中的放大器放大,然后直接轉換成對應的數字信號。換句話說,在CMOS傳感器中,每一個感光元件都可產生最終的數字輸出,所得數字信號合并之后被直接送交DSP芯片處理,問題恰恰是發生在這里,CMOS感光元件中的放大器屬于模擬器件,無法保證每個像點的放大率都保持嚴格一致,致使放大后的圖像數據無法代表拍攝物體的原貌—體現在最終的輸出結果上,就是圖像中出現大量的噪聲,品質明顯低于CCD傳感器,不過目前這方面的技術已大幅改善。
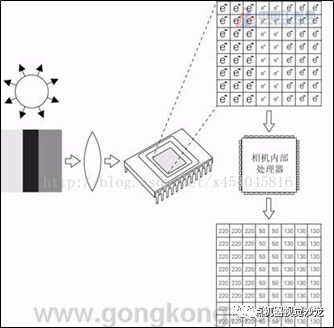
二. 黑白相機成像原理:
以CCD原理為例,CCD原理并不復雜。我們可以把它想象成一個頂部被打開的記憶芯片。因此光束可以射到記憶單元中。根據"光電效應”,這些光束在記憶單元中產生負電荷(下圖中右上部分)
三. 彩色彩色成像原理:
CCD芯片將光子轉換為電子,在這一過程當中,光子數目與電子數目互成比例。但光子還有另外一個特征值——波長(波長決定顏色),而這條信息卻沒有在這個過程中被轉換為電子。因此,從這個意義上說,CCD芯片都可以被稱為色盲。所以彩色相機的成像稍微復雜些,目前主要有兩種方式:三棱鏡方式和濾光片方式,下面分別介紹:
三棱鏡方式:
為了獲取光線的顏色信息,我們很容易想到用三棱鏡將光束分成單色光,然后分別成像,對,三棱鏡方式就是這個原理,如下圖:
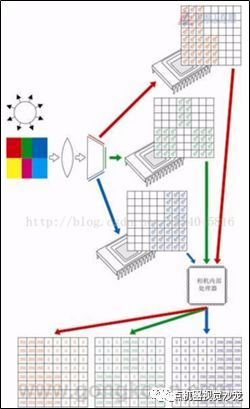
它將從鏡頭射入的光分成三束,每束光都由不同的內置光柵來過濾出某一種三原色,然后使用三塊CCD分別感光。這些圖象再合成出一個高分辨率、色彩精確的圖象。如300萬像素的相機就是由三塊300萬像素的CCD來感光。也就是可以做到同點合成,因此拍攝的照片清晰度相當高。該方法的主要困難在于其中包含的數據太多。在你照下一張照片前,必須將存儲在相機的緩沖區內的數據清除并存盤。因此這類相機對其他部件的要求非常高,其價格自然也非常昂貴。
其他彩色原理省略。
相機常見參數介紹:
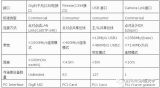
1. 分辨率(Resolution):相機每次采集圖像的像素點數(Pixels),對于工業數字相機一般是直接與光電傳感器的像元數對應的,對于工業數字模擬相機則是取決于視頻制式,PAL制為768*576,NTSC制為640*480。
2. 像素深度(Pixel Depth):即每像素數據的位數,一般常用的是8Bit(2^8),對于工業數字數字相機一般還會有10Bit、12Bit等。
3. 最大幀率(Frame Rate)/行頻(Line Rate):相機采集傳輸圖像的速率,對于面陣相機一般為每秒采集的幀數(Frames/Sec.),對于線陣相機機為每秒采集的行數(Hz)。
4. 曝光方式(Exposure)和快門速度(Shutter):對于工業線陣相機都是逐行曝光的方式,可以選擇固定行頻和外觸發同步的采集方式,曝光時間可以與行周期一致,也可以設定一個固定的時間;面陣相機有幀曝光、場曝光和滾動行曝光等幾種常見方式,工業數字相機一般都提供外觸發采圖的功能。快門速度一般可到10微秒,高速相機還可以更快。
5. 像元尺寸(Pixel Size):像元大小和像元數(分辨率)共同決定了相機靶面的大小。目前工業數字相機像元尺寸一般為3μm-10μm,一般像元尺寸越小,制造難度越大,圖像質量也越不容易提高。
6. 光譜響應特性(Spectral Range):是指該像元傳感器對不同光波的敏感特性,一般響應范圍是350nm-1000nm,一些相機在靶面前加了一個濾鏡,濾除紅外光線,如果系統需要對紅外感光時可去掉該濾鏡。
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753083 -
圖像
+關注
關注
2文章
1083瀏覽量
40449 -
工業相機
+關注
關注
5文章
322瀏覽量
23623
原文標題:工業相機的組成和原理
文章出處:【微信號:機器視覺沙龍,微信公眾號:機器視覺沙龍】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
工業相機測長儀的組成部分


【求購】基恩士工業相機/康耐視工業相機/CCD工業相機等等工業鏡頭
工業相機之相機分類,多種相機的對比
如何選擇合適的工業相機,工業相機的優勢
工業相機組成 工業相機選型
工業相機的組成和原理 黑白相機成像原理

工業相機的常見基礎問答





 工商網監
工商網監
評論