") 創(chuàng)造歷史!商湯聯(lián)合團隊斬獲CVPR最佳論文,推出首個“感知決策一體化”自動駕駛通用大模型
創(chuàng)造歷史!商湯聯(lián)合團隊斬獲CVPR最佳論文,推出首個“感知決策一體化”自動駕駛通用大模型
本屆CVPR論文投稿總量達9155篇,最終共有2369篇論文被接收。最佳論文候選為12篇,接收率僅為0.13%。商湯及聯(lián)合實驗室2篇論文登上最佳論文候選名單(Award Candidate),其中自動駕駛研究論文《Planning-oriented Autonomous Driving》(以路徑規(guī)劃為導(dǎo)向的自動駕駛)斬獲本屆CVPR最佳論文獎(Best Paper Award)。
這是CVPR歷史上第一篇以自動駕駛為主題的最佳論文,該論文首次提出感知決策一體化的自動駕駛通用大模型UniAD,開創(chuàng)了以全局任務(wù)為目標的自動駕駛大模型架構(gòu)先河, 標志著自動駕駛技術(shù)的重要突破, 為自動駕駛技術(shù)與產(chǎn)業(yè)的發(fā)展提出了新的方向。
CVPR 2023最佳論文,自動駕駛研究獲重要突破 自動駕駛技術(shù)高度復(fù)雜,需要融合多學科領(lǐng)域的知識和技能,包括傳感器技術(shù)、機器學習、路徑規(guī)劃等方面。自動駕駛還需要適應(yīng)不同的道路規(guī)則和交通文化,與車輛和行人進行良好交互,以實現(xiàn)高度可靠和安全的自動駕駛系統(tǒng)。大部分自動駕駛相關(guān)的工作都聚焦在具體的某個模塊,關(guān)于框架性的研討則相對匱乏。
商湯及聯(lián)合實驗室CVPR 2023 Best Paper提出的自動駕駛通用算法框架——Unified Autonomous Driving(UniAD)首次將檢測、跟蹤、建圖、軌跡預(yù)測,占據(jù)柵格預(yù)測以及規(guī)劃整合到一個基于Transformer 的端到端網(wǎng)絡(luò)框架下,更高效契合了“多任務(wù)”和“高性能”的特點,取得自動駕駛技術(shù)研究重要突破。
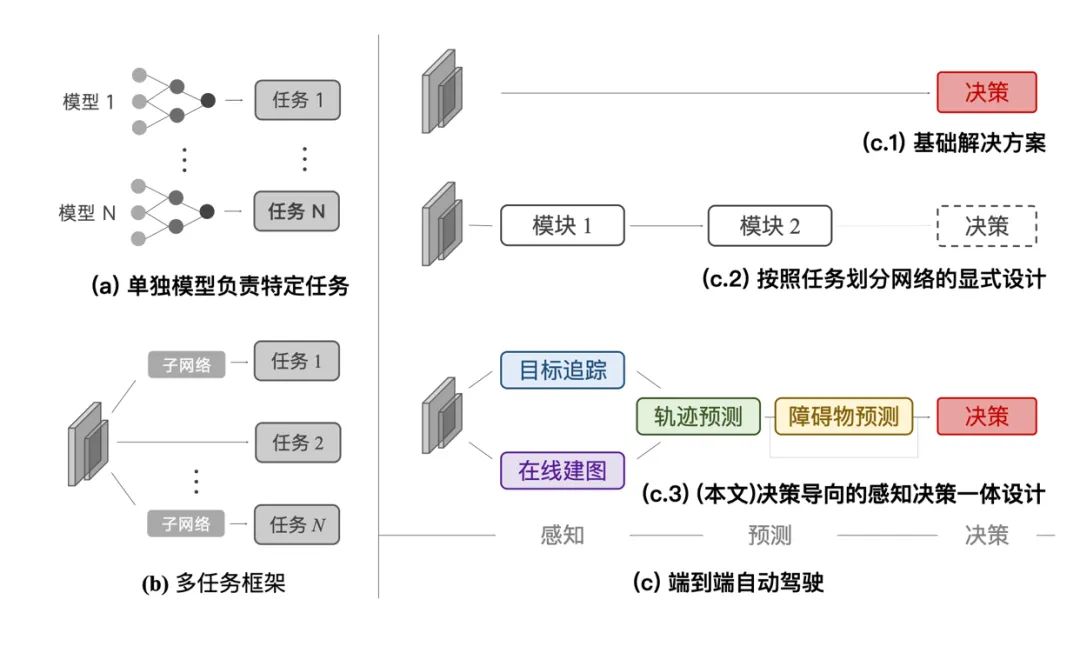 自動駕駛UniAD框架對比(a)模塊化(b)多任務(wù)模塊(c)端到端自動駕駛模塊
自動駕駛UniAD框架對比(a)模塊化(b)多任務(wù)模塊(c)端到端自動駕駛模塊
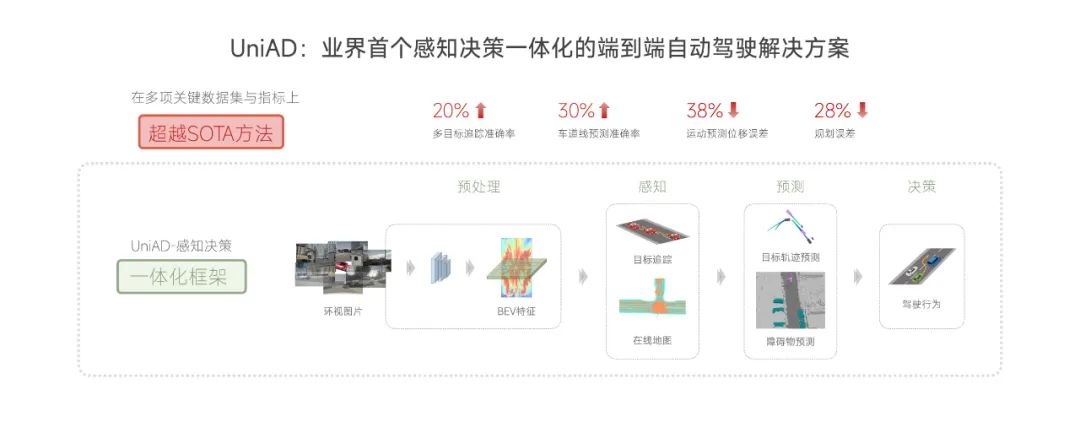
商湯科技聯(lián)合創(chuàng)始人、首席科學家、絕影智能汽車事業(yè)群總裁王曉剛表示,UniAD是業(yè)內(nèi)首個感知決策一體化的端到端自動駕駛解決方案,并且整體系統(tǒng)和性能取得大幅提升,代表了未來自動駕駛技術(shù)的發(fā)展趨勢。
這種端到端的優(yōu)化在多項關(guān)鍵技術(shù)指標上超越了SOTA。比如,多目標跟蹤準確率超越SOTA 20%,車道線預(yù)測準確率提升30%,預(yù)測運動位移誤差降低38%,規(guī)劃誤差降低28%。
 點擊可查看高清圖
點擊可查看高清圖
UniAD 是一項極具創(chuàng)新性的自動駕駛技術(shù),且因其具有很大的潛力和應(yīng)用價值,目前在學術(shù)界和工業(yè)界都引起了廣泛興趣和關(guān)注。
隨著通用人工智能(AGI)引領(lǐng)的二次革命的到來,以此為基礎(chǔ),期待在未來能推動實現(xiàn)更高階的自動駕駛人工智能。
CVPR 2023最佳論文候選,加速推動AIGC時代真實感3D內(nèi)容生成
面向真實 3D 物體的感知、理解、重建與生成是計算機視覺領(lǐng)域一直倍受關(guān)注的問題。由于缺乏大規(guī)模的真實掃描三維數(shù)據(jù)庫,最近在三維物體建模方面的進展大多依賴于合成數(shù)據(jù)集。為促進現(xiàn)實世界中3D感知、重建和生成的發(fā)展,商湯及聯(lián)合實驗室CVPR 2023 Best Paper候選論文《OmniObject3D: Large-Vocabulary 3D Object Dataset for Realistic Perception, Reconstruction and Generation》提出了OmniObject3D,一個具有大規(guī)模高質(zhì)量真實掃描3D物體的大型詞匯3D物體數(shù)據(jù)集,覆蓋近200個類別、約6000個三維物體數(shù)據(jù),包括高精表面網(wǎng)格、點云、多視角渲染圖像和實景采集的視頻,借助專業(yè)掃描設(shè)備保證了物體數(shù)據(jù)的精細形狀和真實紋理。
OmniObject3D是目前學界最大的真實世界三維掃描模型數(shù)據(jù)集,為未來三維視覺研究提供了廣闊空間。
利用該數(shù)據(jù)集,研究人員精心探討了點云識別、神經(jīng)渲染、表面重建、三維生成等多種學術(shù)任務(wù)的魯棒性和泛化性,驗證其從感知、重建、到生成領(lǐng)域的開放應(yīng)用前景,有望在AIGC 時代推動真實感3D生成方面發(fā)揮至關(guān)重要的作用。 持續(xù)引領(lǐng)前沿創(chuàng)新,是商湯在以大裝置SenseCore和大模型為核心的AI基礎(chǔ)設(shè)施領(lǐng)域長期投入,并堅持產(chǎn)學研協(xié)同創(chuàng)新的成果。
王曉剛教授認為,在大算力、大數(shù)據(jù)的支撐下,大模型將以更強大的通用能力引發(fā)人工智能領(lǐng)域的巨大變革,同時也會拓展我們的研究視野,激發(fā)新一輪研究范式革新。
自今年4月初“商湯日日新SenseNova”大模型體系公布以來,商湯的大模型已在氣象預(yù)報、遙感解譯、開放環(huán)境中的決策問題等領(lǐng)域取得了諸多突破性成就。未來,商湯將繼續(xù)與產(chǎn)學研各界共同擁抱和探索大模型帶來的范式革新,為AI的前沿探索開拓新方向和新路徑。
相關(guān)閱讀,戳這里
《CVPR 2022丨商湯再創(chuàng)佳績,用技術(shù)創(chuàng)新直擊行業(yè)痛點》

原文標題:創(chuàng)造歷史!商湯聯(lián)合團隊斬獲CVPR最佳論文,推出首個“感知決策一體化”自動駕駛通用大模型
文章出處:【微信公眾號:商湯科技SenseTime】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
商湯科技
+關(guān)注
關(guān)注
8文章
508瀏覽量
36085
原文標題:創(chuàng)造歷史!商湯聯(lián)合團隊斬獲CVPR最佳論文,推出首個“感知決策一體化”自動駕駛通用大模型
文章出處:【微信號:SenseTime2017,微信公眾號:商湯科技SenseTime】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
一體化自動氣象監(jiān)測系統(tǒng):全天候守護,24小時不間斷監(jiān)測

聊聊自動駕駛離不開的感知硬件
《嵌入式機電一體化系統(tǒng)設(shè)計與實現(xiàn)》讀后感
揭秘! 經(jīng)緯恒潤“車路云一體化”方案研發(fā)服務(wù)背后的科技驅(qū)動力

FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
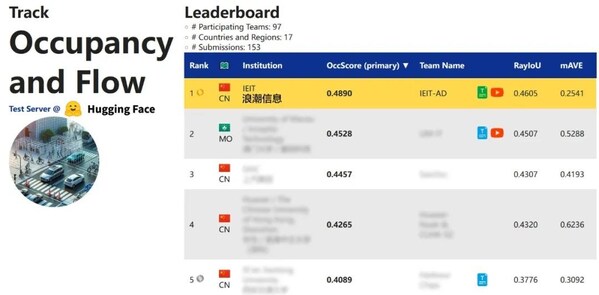
浪潮信息獲CVPR2024自動駕駛挑戰(zhàn)賽"Occupancy& Flow"冠軍
康謀分享 | 自動駕駛聯(lián)合仿真——功能模型接口FMI(一)

什么是機電一體化?它有哪些應(yīng)用?
商湯科技聯(lián)合海通證券發(fā)布業(yè)內(nèi)首個面向金融行業(yè)的多模態(tài)全棧式大模型

未來已來,多傳感器融合感知是自動駕駛破局的關(guān)鍵
自動駕駛已成現(xiàn)實?賽思時間同步服務(wù)器賦能北京市高級別自動駕駛示范區(qū),為自動駕駛提供中國方案

商湯科技AI技術(shù)助力肝臟診療一體化
什么是通感算一體化?通感算一體化的應(yīng)用場景






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論