 西門子S7-1200 PLC定位控制教程
西門子S7-1200 PLC定位控制教程
使用博途組態向導,建立定位的工藝對象后,利用定位相關指令,即可進行相關操作,相關指令軸啟用,回原點,點動,絕對定位,相對定位,復位,暫停等。
1.軸啟用MC_POWER
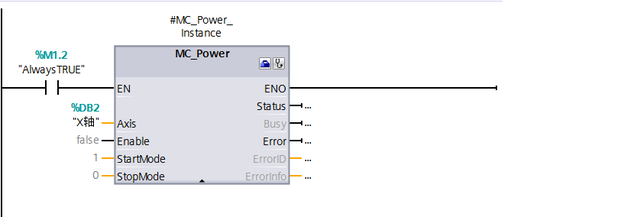
軸啟動指令
Axis,指定啟動軸,調用工藝對象配置的定位軸。
Enable,啟用軸使能;當信號ON時,在工藝配置中指定的伺服使能輸出自動ON。
StartMode,StopMode使用默認模式即可。
Status,軸啟用的狀態,ON為OK,OFF出現錯誤
Error,當軸啟用錯誤時,信號輸出
2.伺服回原點,MC_Home
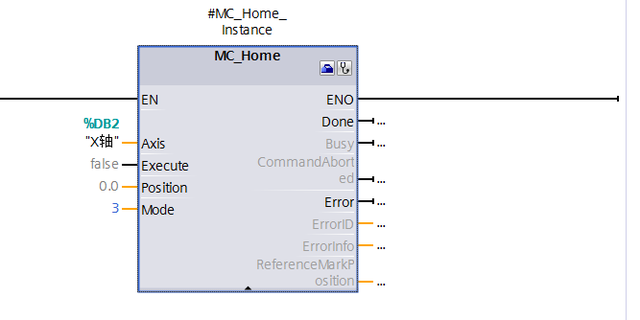
回原點指令
Execute,輸入信號ON時,啟用回原點,信號僅上升沿有效。
Done,回原點完成信號,定位完成輸出上升沿信號,使用SET指令保持信號。
或啟用回原點時,Execute信號一直為ON,直至DONE有信號。
Position,伺服回原點后,偏移多少定義為原地位置,默認為0.0。
Mode,回原點模式,改用3#模式。
Error,回原點過程中出現錯誤時,信號為ON。
3.點動JOG,MC_Movejog
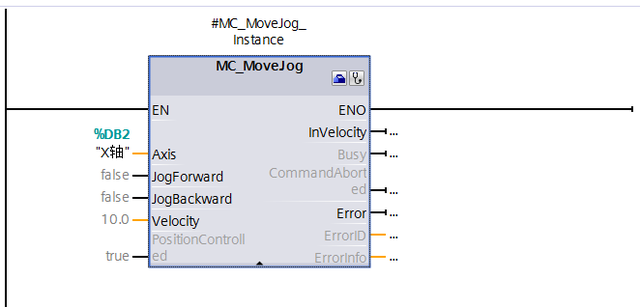
JOG指令
JogForward,電機正轉,信號ON時啟用,OFF時停止運行。
JogBackward,電機反正,信號ON時啟用,OFF時停止運行。
JogForward與JogBackward不可以同時使用。
Velocity,指定伺服JOG運行速度。
Error,點動出現錯誤時,信號為ON。
4.絕對定位,MC_MoveAbsolute
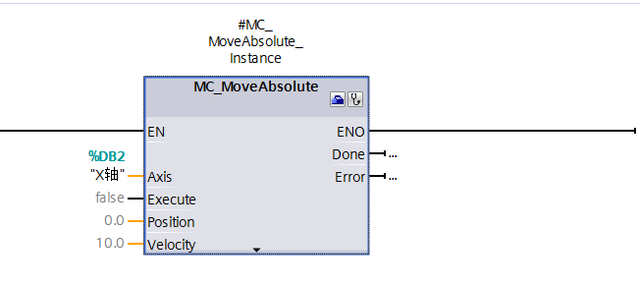
絕對定位指令
Execute,輸入信號ON時,啟用絕對定位,信號僅上升沿有效。
Done,定位完成信號,定位完成輸出上升沿信號,使用SET指令保持信號。
或啟用定位時,Execute信號一直為ON,直至DONE有信號。
Position,指定絕對定位的目標位置。
Velocity,指定絕對定位運行速度。
Error,絕對定位錯誤時,信號為ON。
5.伺服暫停,MC_Halt。
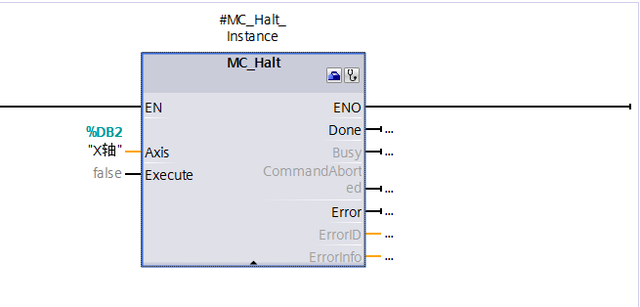
伺服暫停
Execute,輸入信號ON時,啟用伺服暫停,啟用時,伺服定位指令必須斷開。
Done,伺服暫停OK時,輸出信號為ON。
Error,伺服暫停錯誤時,信號為ON。
6.伺服復位,MC_Reset。
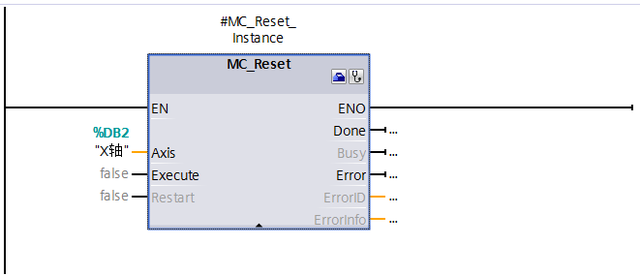
伺服復位
當調用伺服相關指令出現錯誤時,需要使用伺服復位指令,解除報警。
Execute,輸入信號ON時,啟用伺服復位,啟用時,伺服定位指令需斷開。
Done,伺服復位解除報警OK時,輸出信號為ON。
Error,伺服報警解除出現錯誤時,信號為ON。
伺服定位相關指令的詳細內容,可以查看手冊了解。
審核編輯:湯梓紅
-
plc
+關注
關注
5010文章
13271瀏覽量
463067 -
西門子
+關注
關注
94文章
3034瀏覽量
115782 -
指令
+關注
關注
1文章
607瀏覽量
35694 -
定位控制
+關注
關注
0文章
26瀏覽量
10322 -
S7-1200
+關注
關注
11文章
331瀏覽量
17957
原文標題:西門子S7-1200 PLC定位控制
文章出處:【微信號:中泰PLC自動化教學,微信公眾號:中泰PLC自動化教學】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
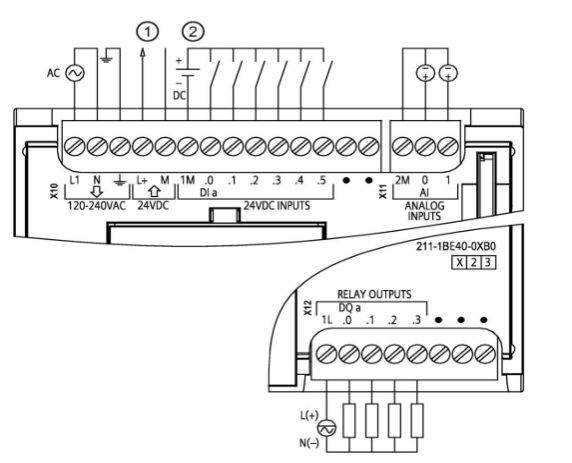
西門子S7-1200系列PLC輸入/輸出接線

西門子S7-1200 PLC定位控制-程序


如何選擇合適的西門子S7-1200 PLC
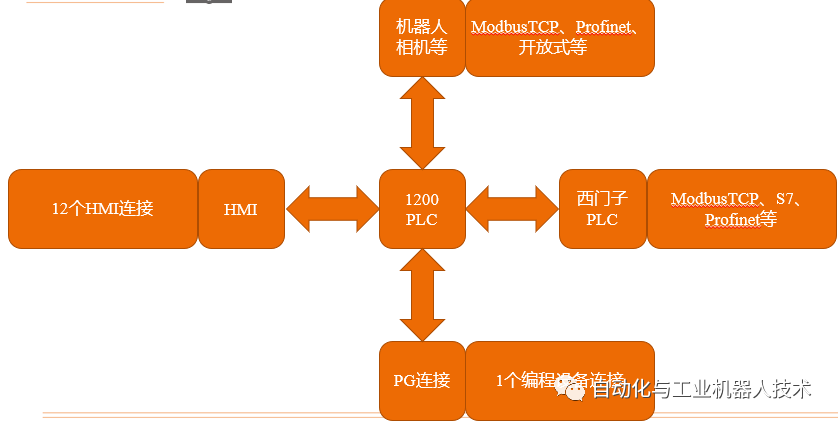
西門子1200PLC之間的ModbusTCP通訊如何實現?





 工商網監
工商網監
評論