 人形機器人迭代下供應鏈的新機遇
人形機器人迭代下供應鏈的新機遇
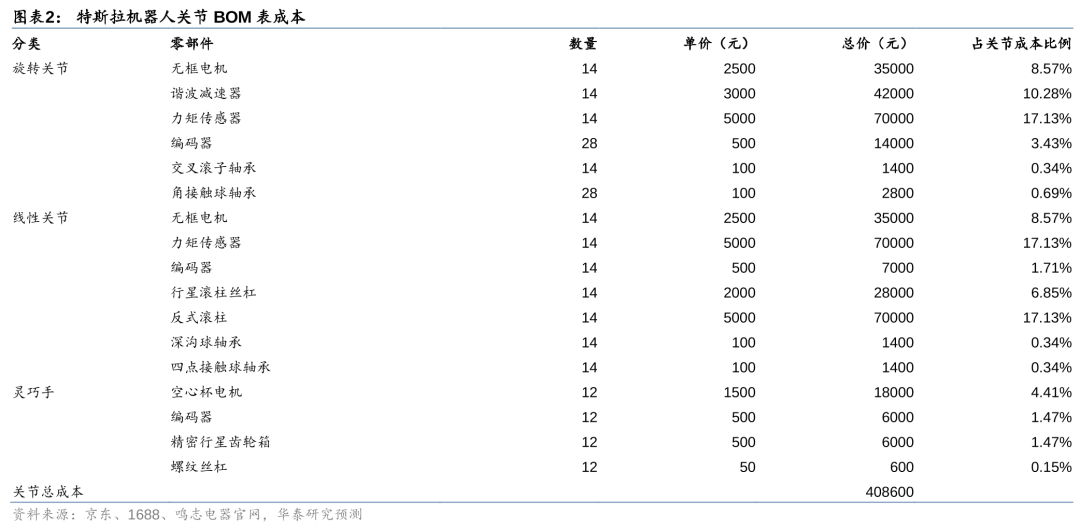
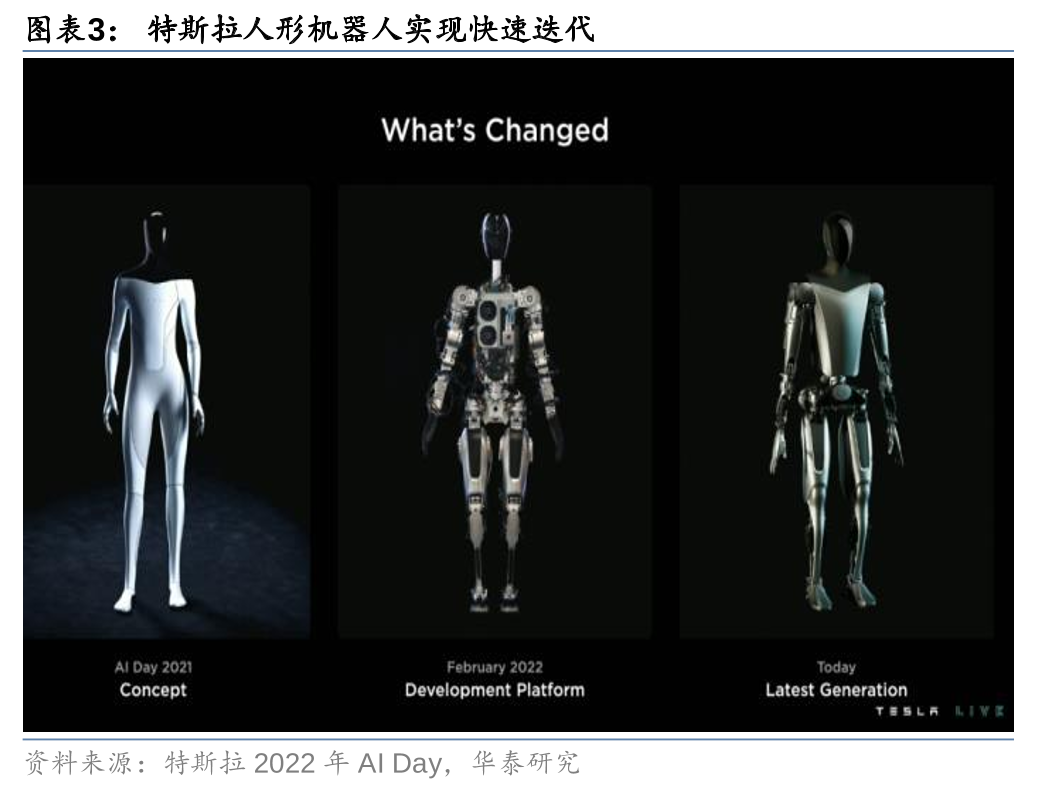
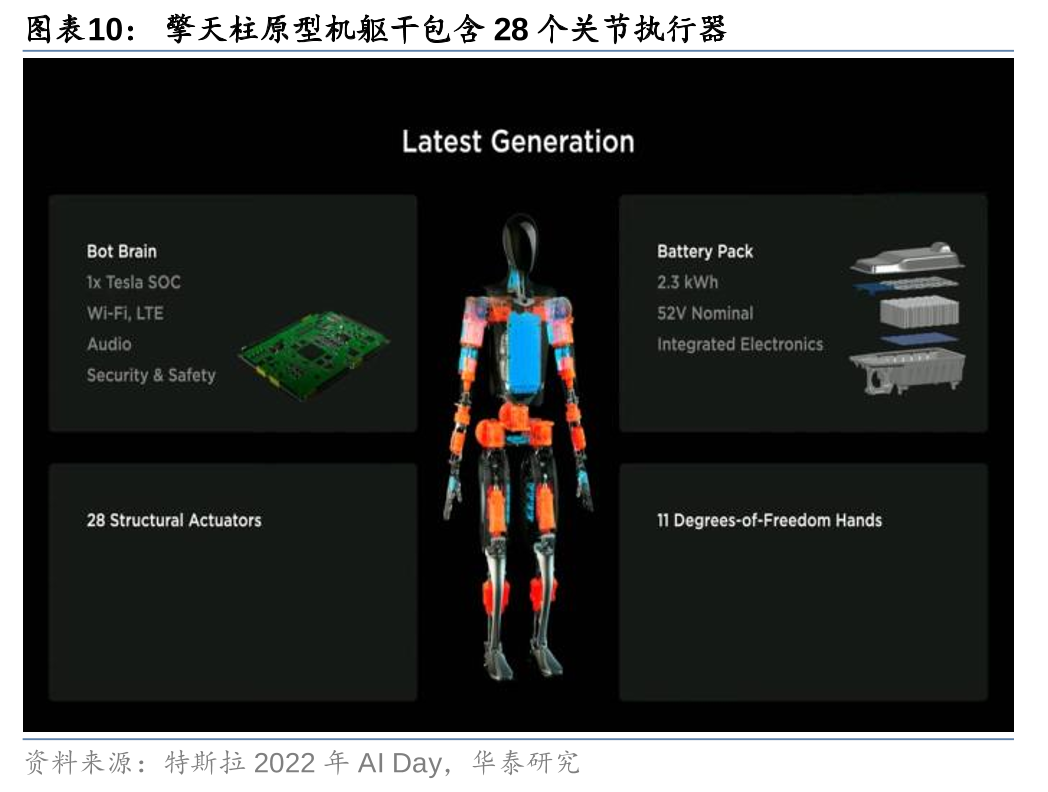
2021年特斯拉在AI Day上首次提出其人形機器人Optimus的渲染圖;2022年AI Day上,特斯拉推出原型機,在沒有外接線纜的情況下實現了緩慢行走與揮手;2023年5月股東大會上,特斯拉人形機器人已經可以實現流暢的行走與抓取物品,靈活度較原型機大大提高。經過我們的測算,目前特斯拉機器人關節的總成本為41萬元左右,從高到低價值量占比前四的零部件分別為:力矩傳感器、滾柱絲杠、無框電機、諧波減速器。
核心觀點
通用機器人迎來曙光,已具備協作安全性
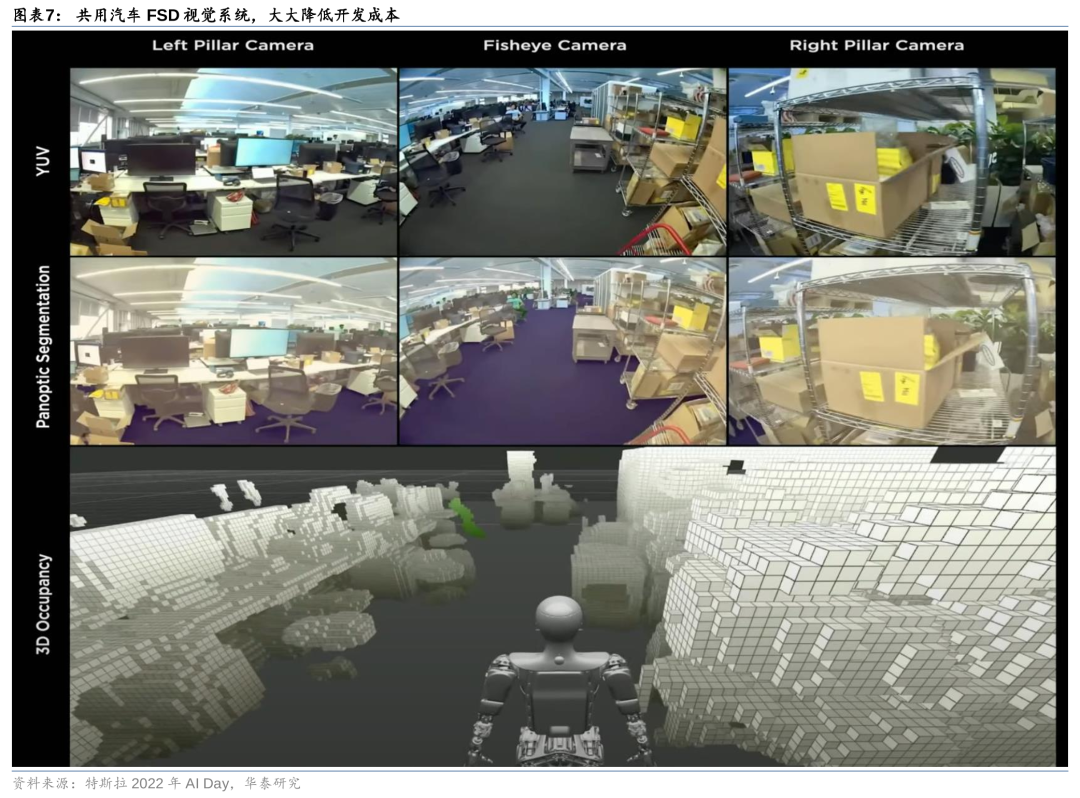
我們認為人形雙足機器人為通用機器人的最優解,因為人類社會的種種事物都按照人類的生理結構進行設計的,為了適應種類多樣的任務,達到通用的目的,貼近人類形態的雙足機器人其隱形成本最小。2023年5月,特斯拉機器人腿部的末端關節能夠在落地的同時不打碎雞蛋,也能夠輕松地抓取物品,證明其末端肢體關節的力矩控制能力有了顯著的提高,增強了與人協同時的安全性。通過共用特斯拉汽車上的FSD自動駕駛系統,特斯拉機器人已經可以利用視覺自主識別、記憶周圍環境,構建地圖。工程師也可以通過AI對其進行肢體的模擬訓練,大大降低了其開發成本。
力矩傳感器/滾柱絲杠/無框電機/諧波減速器為高價值量環節
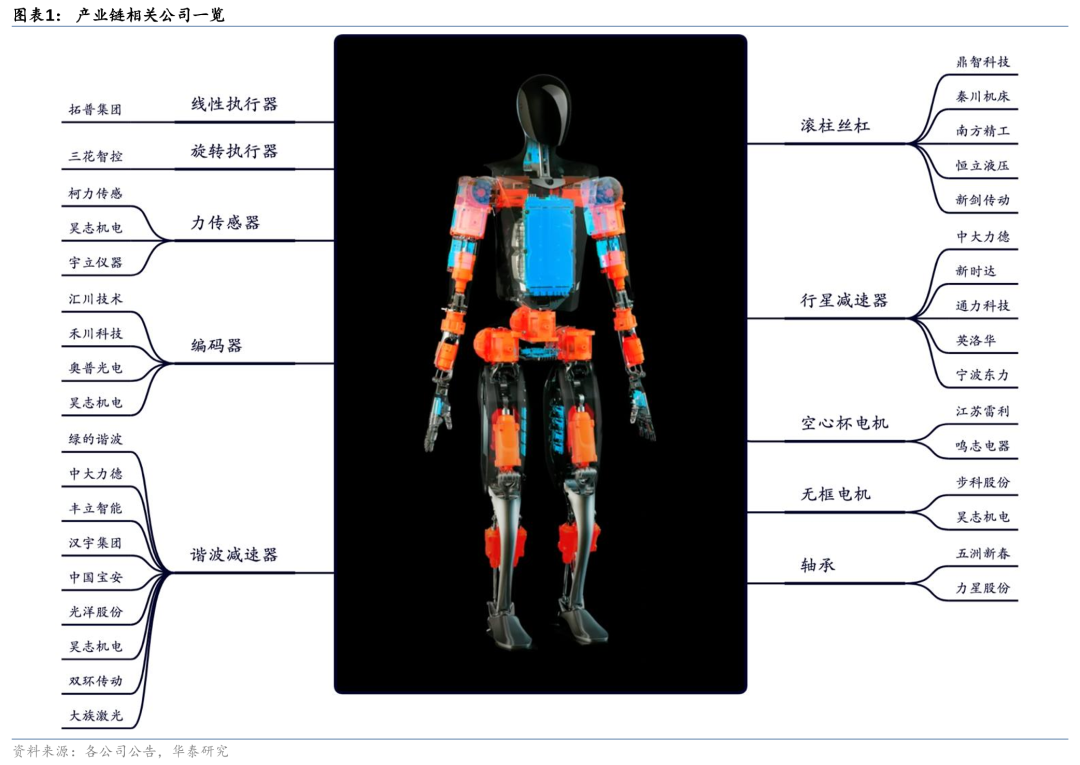
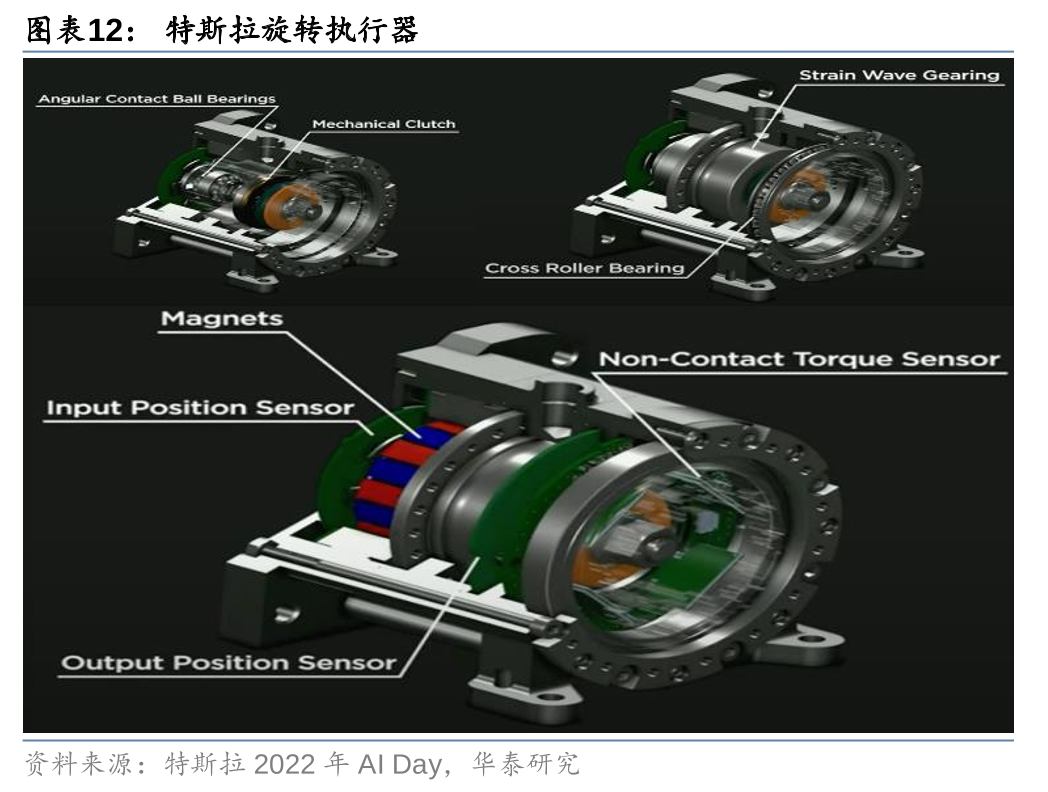
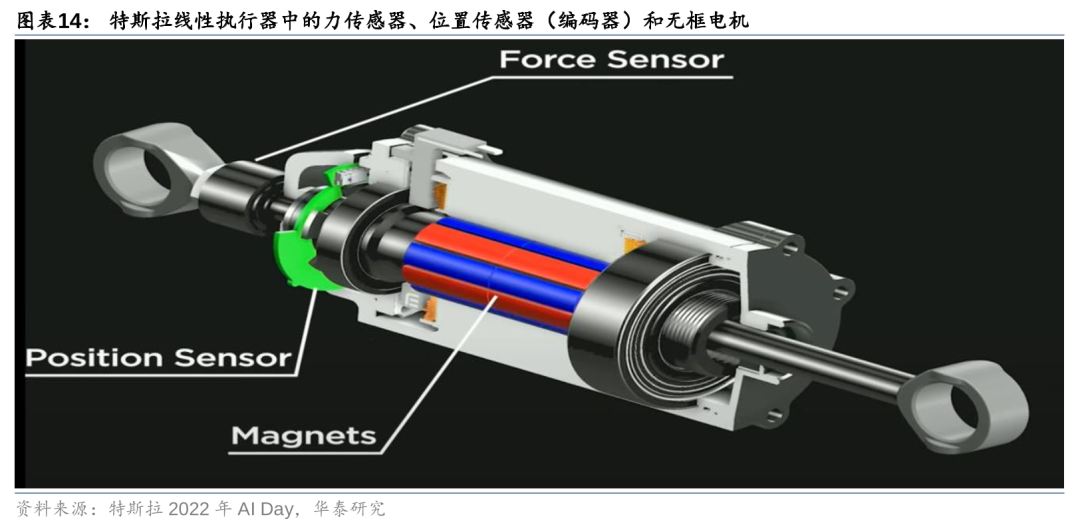
旋轉執行器、線性執行器、靈巧手共同構建擎天柱全身40個關節。旋轉執行器由角接觸軸承、諧波減速器、交叉滾子軸承、編碼器、無框電機、力矩傳感器構成。特斯拉線性執行器由深溝球軸承、無框電機、力矩傳感器、編碼器、反式滾柱和四點接觸球軸承構成。靈巧手主要由空心杯電機、螺紋絲杠、行星精密齒輪箱和編碼器構成。根據我們的測算,目前特斯拉機器人關節BOM表成本為41萬元左右,其中力矩傳感器、滾柱絲杠、無框電機、諧波減速器價值量占比較高。
力矩傳感器/滾柱絲杠/空心杯電機技術壁壘較高
六維力矩傳感器除了要解決對所測力分量敏感的單調性和一致性問題外,還要解決因結構加工、工藝誤差引起的維間(軸間)干擾問題和電路實現,技術難度大。對于滾柱絲杠來說,企業為了實現高速或精密的加工,除在機床設備的結構剛性進行加強設計外,必須同時具備高速主軸系統和高速進給系統,才能達到材料切削過程的高速化,這對于企業的制造能力和設計能力都有較高的要求。空心杯電機核心技術難點在于大批量生產和精密齒輪箱減速器。國內眾多廠商采用手工繞線的方式生產,在生產效率、產品壽命、精度方面存在劣勢。
風險提示:特斯拉機器人方案變更;成本測算具有一定局限性;特斯拉機器人產業化不及預期。
正文
產業鏈相關公司與BOM表成本一覽
特斯拉機器人快速迭代,通用機器人迎來曙光
通用機器人迎來曙光,已具備協作安全性
快速迭代下特斯拉機器人已能實現行走/抓取等動作,通用機器人迎來曙光。2021年特斯拉在AI Day上首次提出其人形機器人Optimus的渲染圖;2022年AI Day上,特斯拉推出原型機,在沒有外接線纜的情況下實現了緩慢行走與揮手;2023年5月股東大會上,特斯拉人形機器人已經可以實現流暢的行走與抓取物品,靈活度較原型機大大提高。我們認為人形雙足機器人為通用機器人的最優解,因為人類社會的種種事物都按照人類的生理結構進行設計的,為了適應種類多樣的任務,達到通用的目的,貼近人類形態的雙足機器人其隱形成本最小。

特斯拉機器人力矩控制能力提高,增強協作安全性。2023年5月,特斯拉機器人腿部的末端關節能夠在落地的同時不打碎雞蛋,也能夠輕松地抓取物品,證明其末端肢體關節的力矩控制能力有了顯著的提高,增強了與人協同時的安全性。


共用汽車FSD系統,特斯拉機器人已能夠識別、記憶周圍環境。通過共用特斯拉汽車上的FSD自動駕駛系統,特斯拉機器人已經可以利用視覺自主識別、記憶周圍環境,構建地圖。工程師也可以通過AI對其進行肢體的模擬訓練,大大降低了其開發成本。


旋轉執行器、線性執行器、靈巧手共同構建全身40個關節
擎天柱軀干包含28個關節執行器,主要分為旋轉與線性兩大類。考慮到成本等問題,特斯拉設計了旋轉和線性2大類執行器,每類包含3種執行器。擎天柱整體軀干共有28個關節執行器,其中線性執行器14個,旋轉執行器14個。具體應用部位分別為肩部6個旋轉執行器、肘部2個線性執行器和2個旋轉執行器、腕部4個線性執行器、腰部2個旋轉執行器、髖部4個旋轉執行器、腿部8個線性執行器。

力矩傳感器、諧波減速器、無框電機和編碼器為旋轉執行器重要零部件。特斯拉旋轉執行器由角接觸軸承、諧波減速器、交叉滾子軸承、編碼器、無框電機、力矩傳感器構成,其中編碼器、無框電機、減速器和力矩傳感器價值量高于其他零部件。
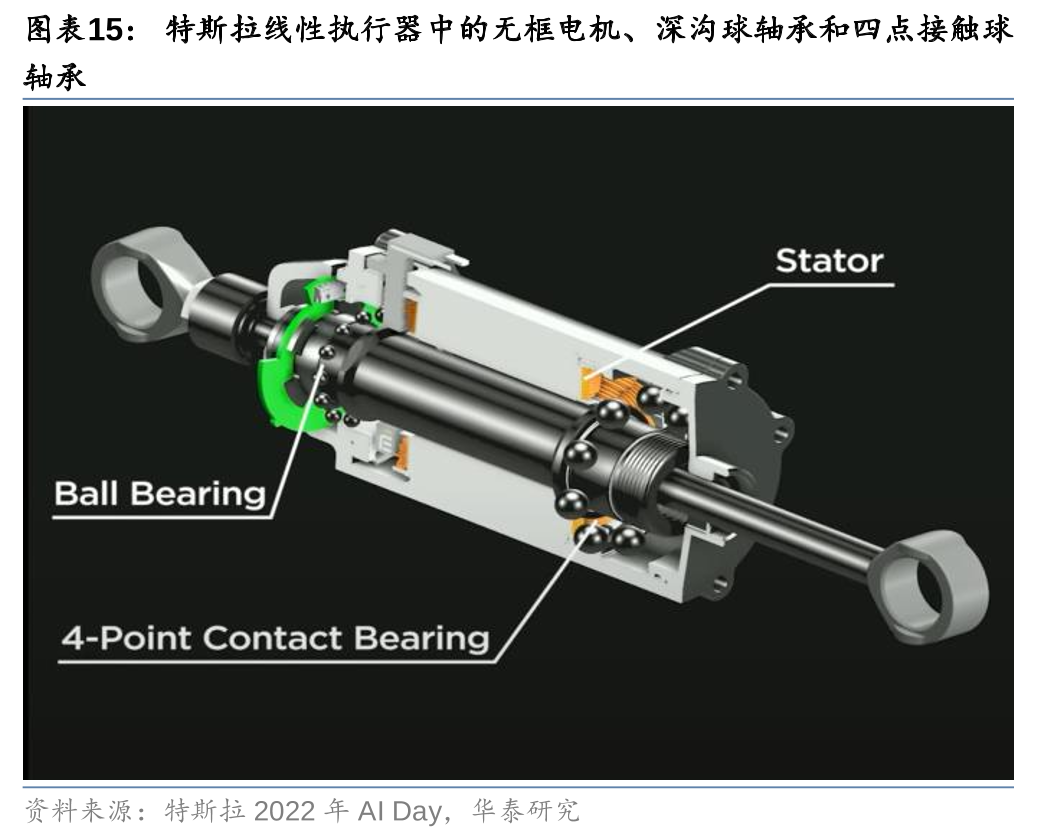
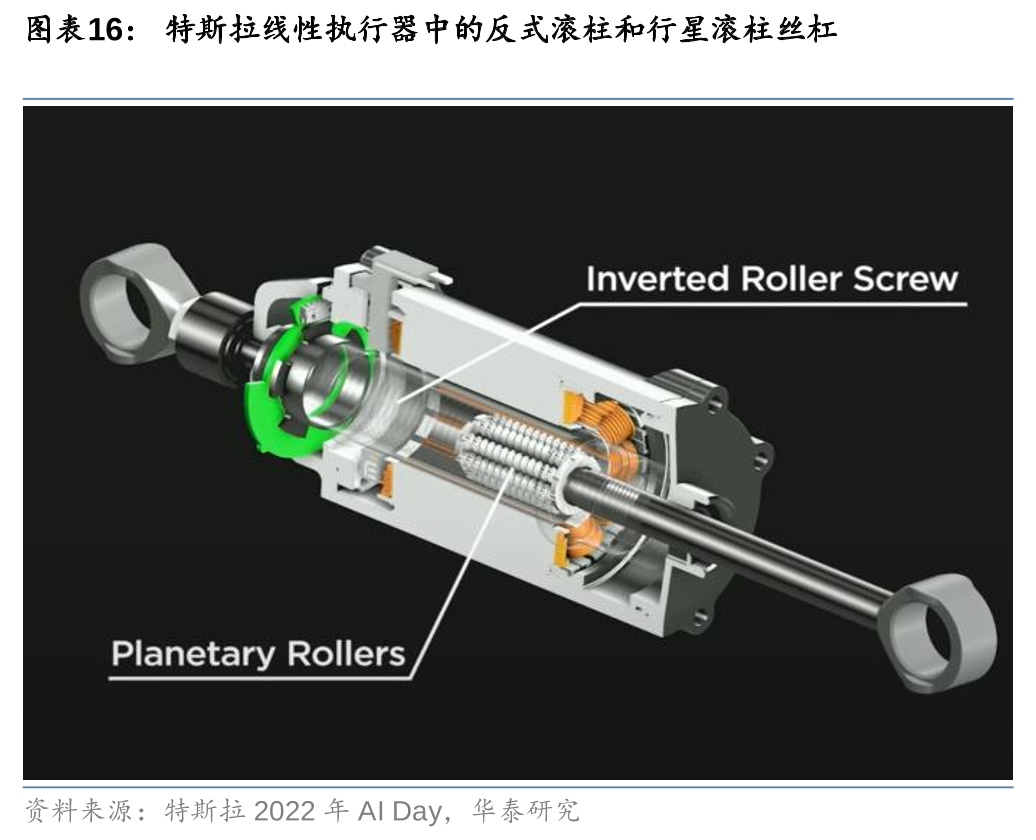
反式滾柱為特斯拉線性執行器中高價值量零部件。特斯拉人形機器人線性執行器由深溝球軸承、無框電機、力矩傳感器、位置傳感器(編碼器)、反式滾柱和四點接觸球軸承構成。
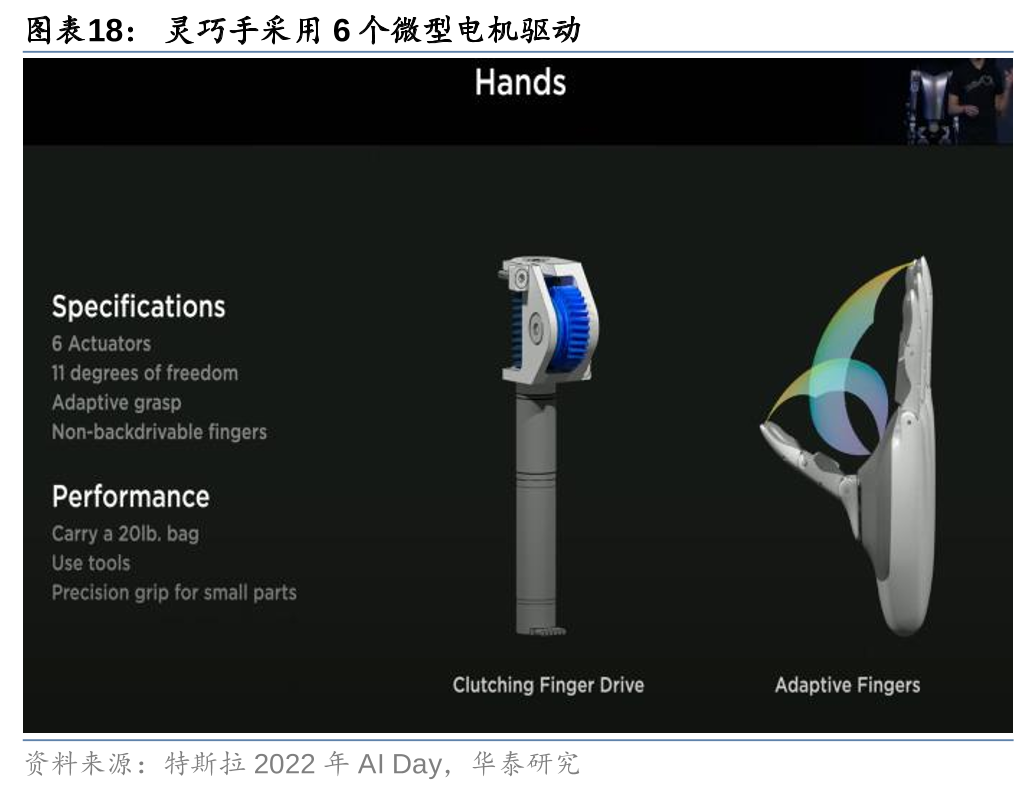
靈巧手采用6電機驅動,空心杯電機為核心部件。擎天柱靈巧手采取了較為經典的六電機布局,其中拇指采用雙電機驅動彎曲和側擺,其它4指各用1個電機帶動,可實現11個自由度。靈巧手主要由空心杯電機、螺紋絲杠、行星精密齒輪箱和編碼器構成,其中空心杯電機為核心部件。算上雙手的12個執行器后,特斯拉機器人的全身執行器數量為40個。

力矩傳感器:為機器人提供觸覺,高性能產品價格昂貴
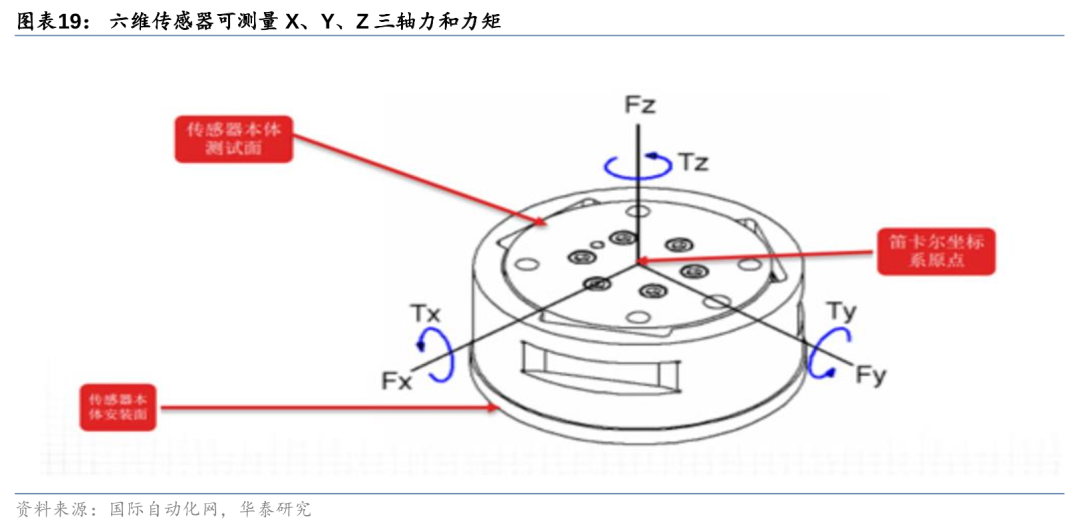
力矩傳感器為機器人提供觸覺,2022年全球市場空間為84億美元。皮膚使得動物具有觸覺,力矩傳感器使得機器人具有觸覺。力矩傳感器是一種電子裝置,用于監測、檢測、記錄施加在其上的線性力和旋轉力,常用于打磨、拋光碰撞檢測等領域。根據Market Insight,2022年全球力矩傳感器市場空間為84億美元,約600億元。按照測量維度上分,力矩傳感器可分為一維至六維傳感器,其中六維傳感器可測量X、Y、Z三軸力和力矩。
高性能進口力傳感器價格昂貴,技術難度大。2022年,在接受高工機器人采訪時,坤維科技創始人熊琳表示:“一臺高性能的進口力傳感器的價格頂得上國內一臺協作機器人的價格,導致國內機器人行業用不起,加之標校能力和生產方式等多方面的約束,國內多數六維力傳感器廠商無法滿足產能需求,阻礙了第三代工業機器人的發展。”其技術難點主要在于,六維力傳感器除了要解決對所測力分量敏感的單調性和一致性問題外,還要解決因結構加工和工藝誤差引起的維間(軸間)干擾問題、動靜態標定問題以及矢量運算中的解耦算法和電路實現。高性能六維傳感器價格從幾千到上萬不等,價值量較高。
編碼器:運動反饋核心部件,國內產品核心指標達到國際水平
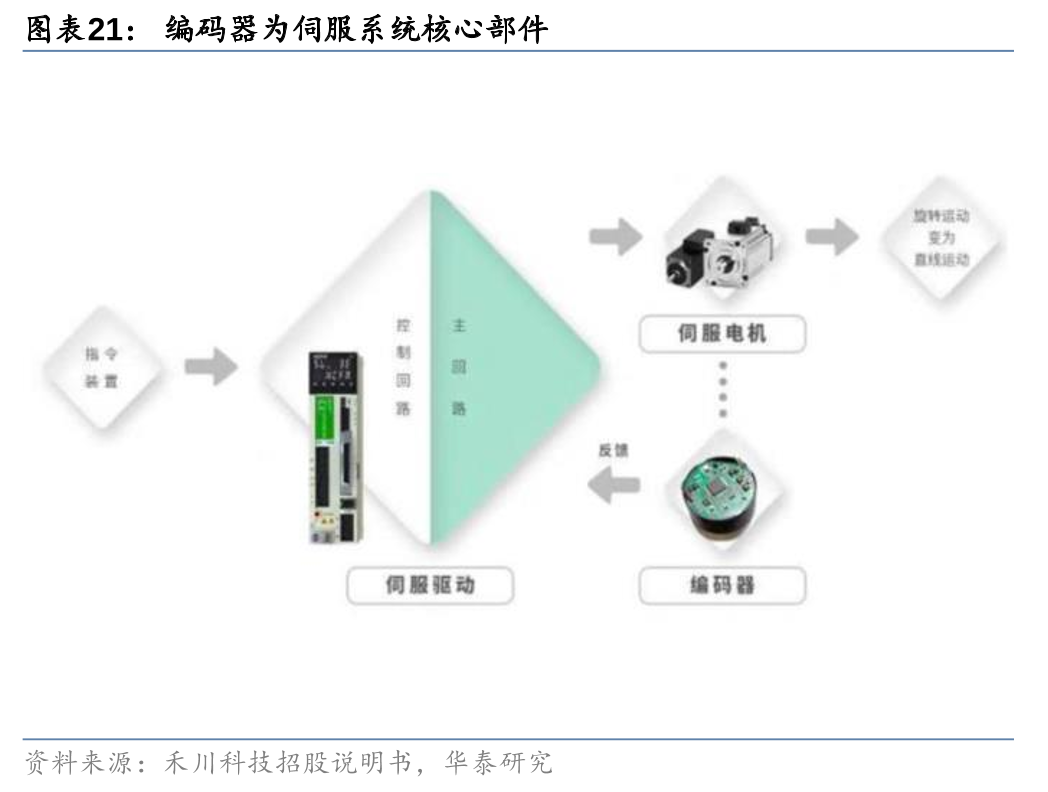
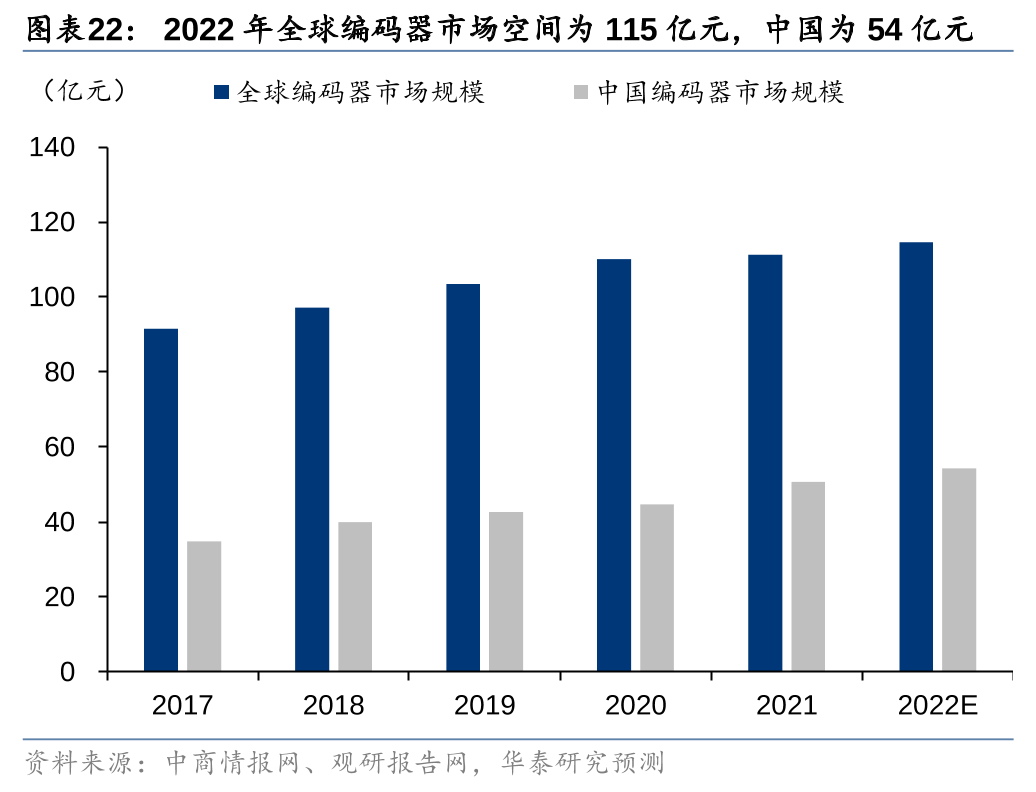
編碼器為運動參數反饋核心部件。伺服系統由伺服驅動器發出信號給伺服電機驅動其轉動,同時編碼器將伺服電機的運動參數反饋給伺服驅動器,伺服驅動器再對信號進行匯總、分析、修正。編碼器按照其原理可分為光電編碼器與磁電編碼器,其中光電編碼器使用較多。根據我們前期發布的報告《運動控制,機器人供應鏈關鍵環節》(2022年8月15日),編碼器占電機成本的30%左右,結合伺服電機的市場規模,我們預計2022年全球編碼器市場空間為115億元,中國市場空間為54億元。
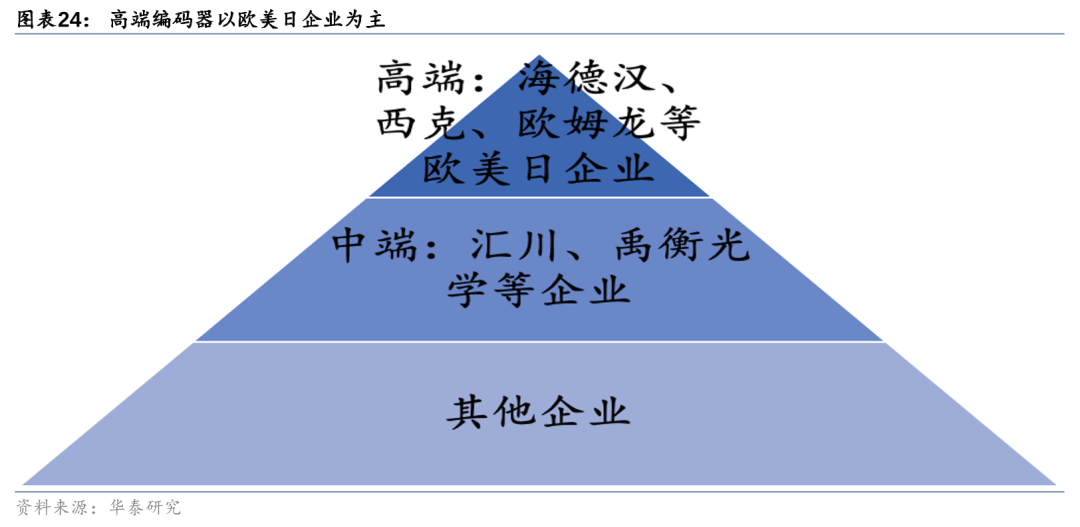
高端編碼器以歐美日企業為主,國內頭部企業部分核心指標已達到國際水平。編碼器分辨率決定了伺服電機旋轉的角位移分辨率,技術難點就在于碼盤的加工生產。碼盤的刻度線越多,控制精度就越高,碼盤體積越大。高端的編碼器以海德漢、西克、歐姆龍等歐美日企業為主,根據我們前期發布的《運動控制,機器人供應鏈關鍵環節》(2022年8月15日),目前部分國內頭部企業核心技術指標已達到國際水平,但穩定性和耐用性方面仍和國際領先水平仍有一定差距。
滾柱絲杠:性能強于滾珠絲杠,日歐占據70%市場
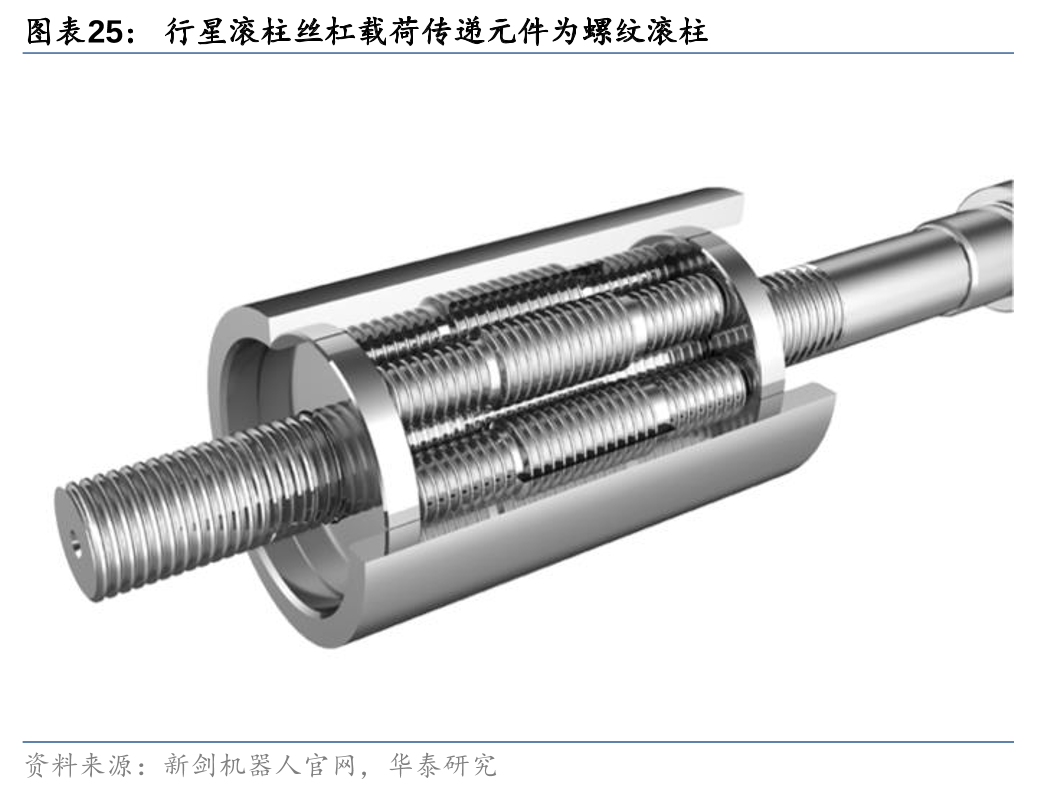
行星滾柱絲杠是將旋轉運動轉換為線性運動的機械裝置,與滾珠絲杠的區別在于其載荷傳遞元件為螺紋滾柱。常見的行星滾柱絲杠在主螺紋絲杠的周圍,行星布置了6-12個螺紋滾柱絲杠,這樣將電機的旋轉運動轉換為絲杠的直線運動。它能夠在極其艱苦的環境下承受重載上千個小時,這樣就使得行星滾柱絲杠成為要求連續工作應用場合的理想選擇。反式滾柱中,滾柱不沿絲杠進行軸向運動,其行程運動是在螺母的內螺紋。滾柱絲杠和滾珠絲杠的主要區別在于載荷傳遞元件,一個為螺紋滾柱,一個為滾珠。
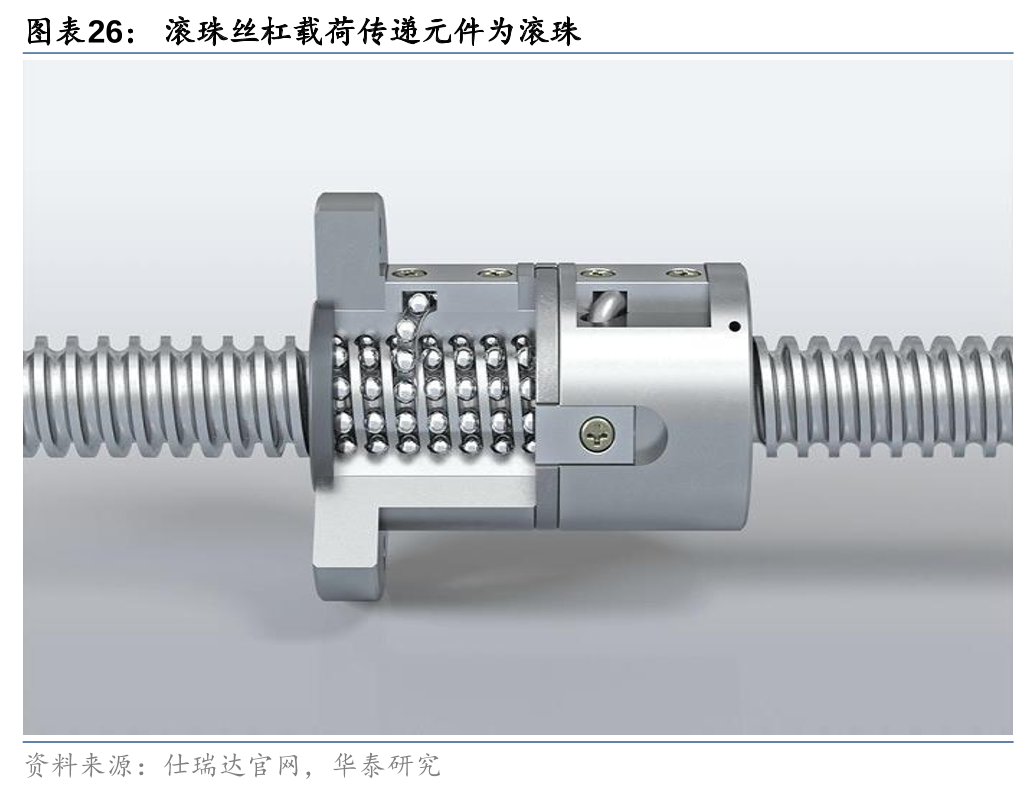
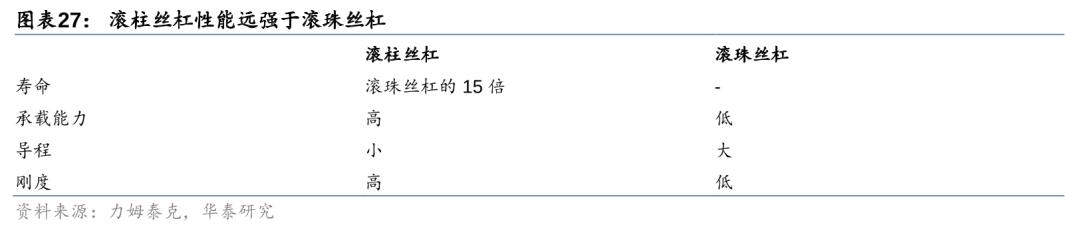
滾柱絲杠性能強于滾珠絲杠,反式滾柱尺寸更小。行星滾柱絲桿能承受的靜載為滾珠絲杠的3倍,壽命為滾珠絲桿的15倍;螺紋滾柱替代滾珠將使負載通過眾多接觸點迅速釋放,從而有更高的抗沖擊能力;行星滾柱絲杠能夠提供更高的旋轉速度和更高的加速度;行星滾柱絲杠的導程可以比滾珠絲杠制造的更小,而滾珠絲杠的導程受到滾珠的直徑限制;眾多接觸點將大幅度提高剛度和抗沖擊能力。反式滾柱較傳統的行星滾柱絲杠尺寸更小,未來滾柱絲杠有望憑借其優異性能持續替代滾珠絲杠。
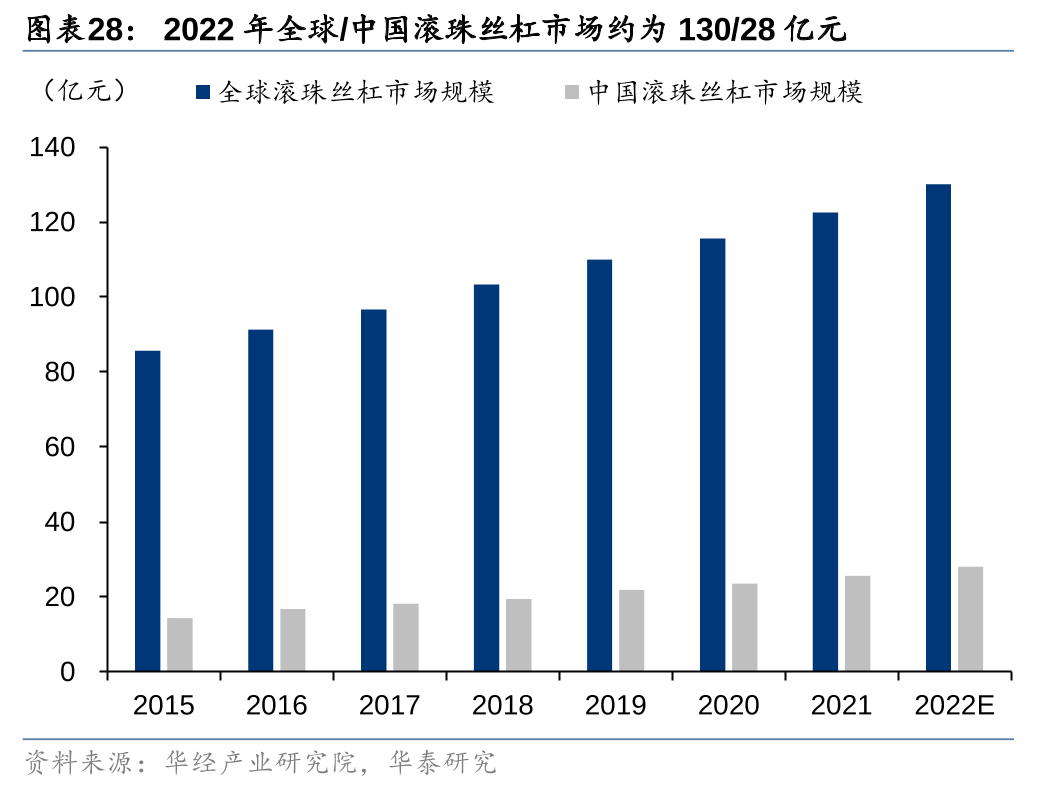
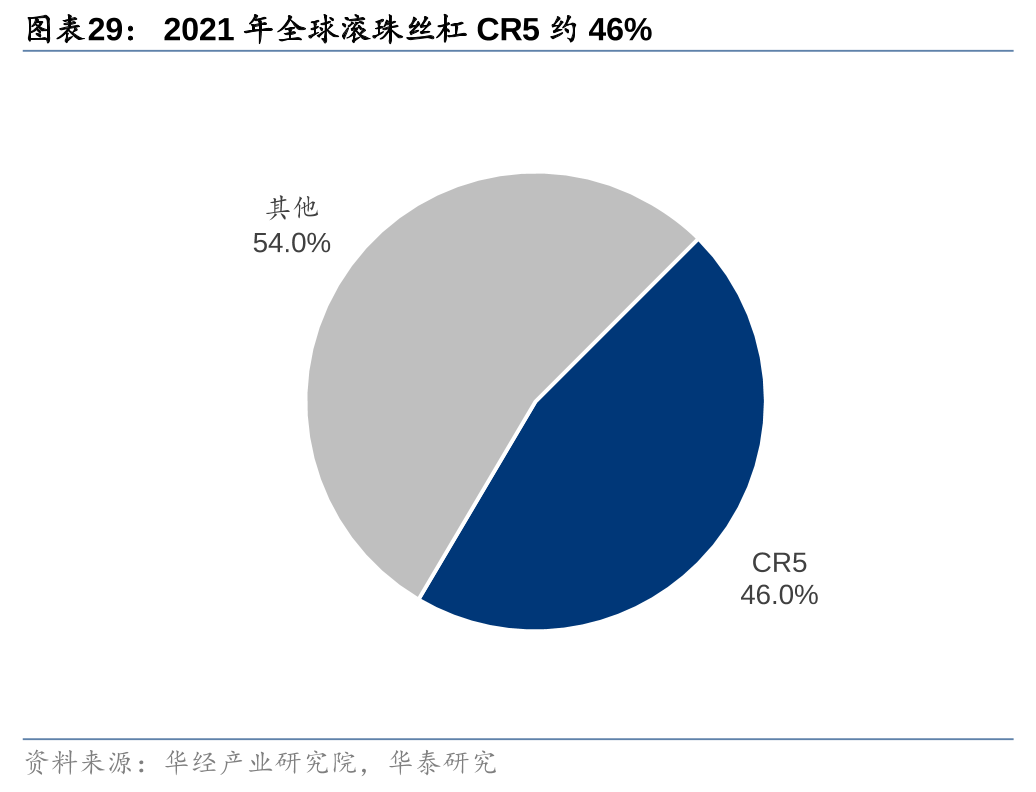
2022年全球/中國滾珠絲杠市場約為130/28億元,日本和歐洲占據70%市場份額。根據華經產業研究院預測,2022年全球滾珠絲杠市場空間約為130億元,中國滾珠絲杠市場空間約為28億元。為了實現高速或精密的加工,除在機床設備的結構剛性進行加強設計外,必須同時具備高速主軸系統和高速進給系統,才能達到材料切削過程的高速化,這對于企業的制造能力和設計能力都有較高的要求。從市場競爭格局看,2021年全球主要的滾珠絲桿廠商有NSK、THK、SKF等,CR5市占率達到約46%,其中主要來自歐洲和日本,日本和歐洲滾珠絲桿企業占據了全球約70%的市場份額。國內做滾柱和滾珠絲杠的企業較少。
無框電機:體積小效率高,國內無框電機已達到國際水平
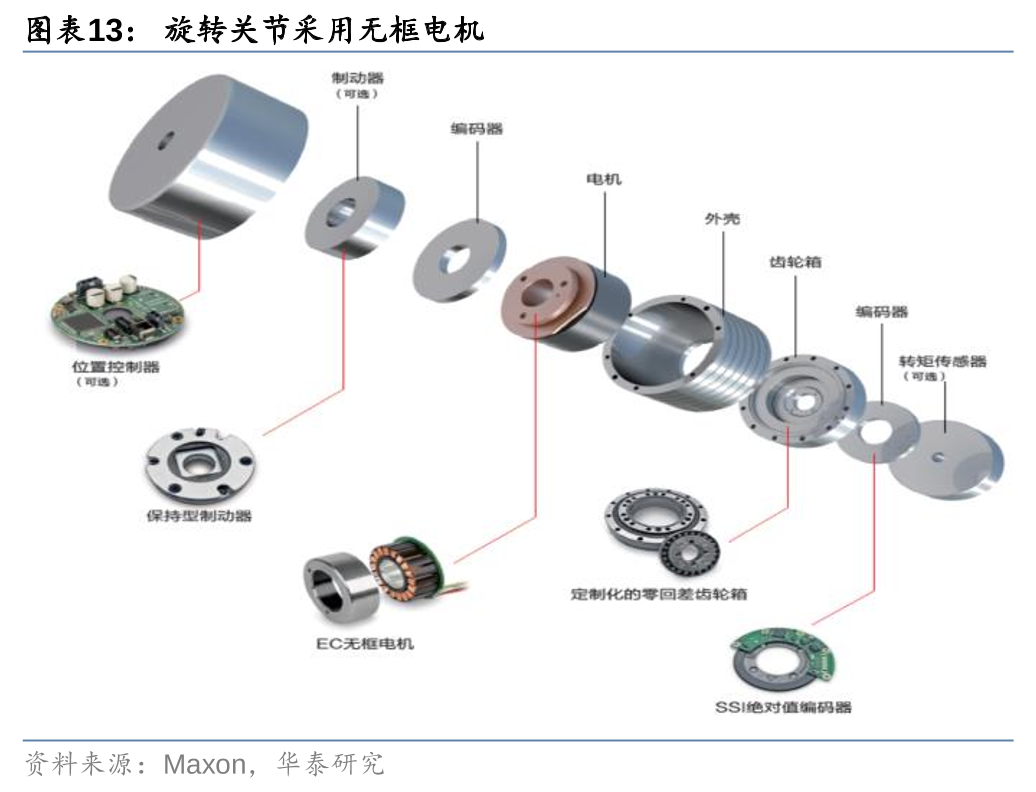
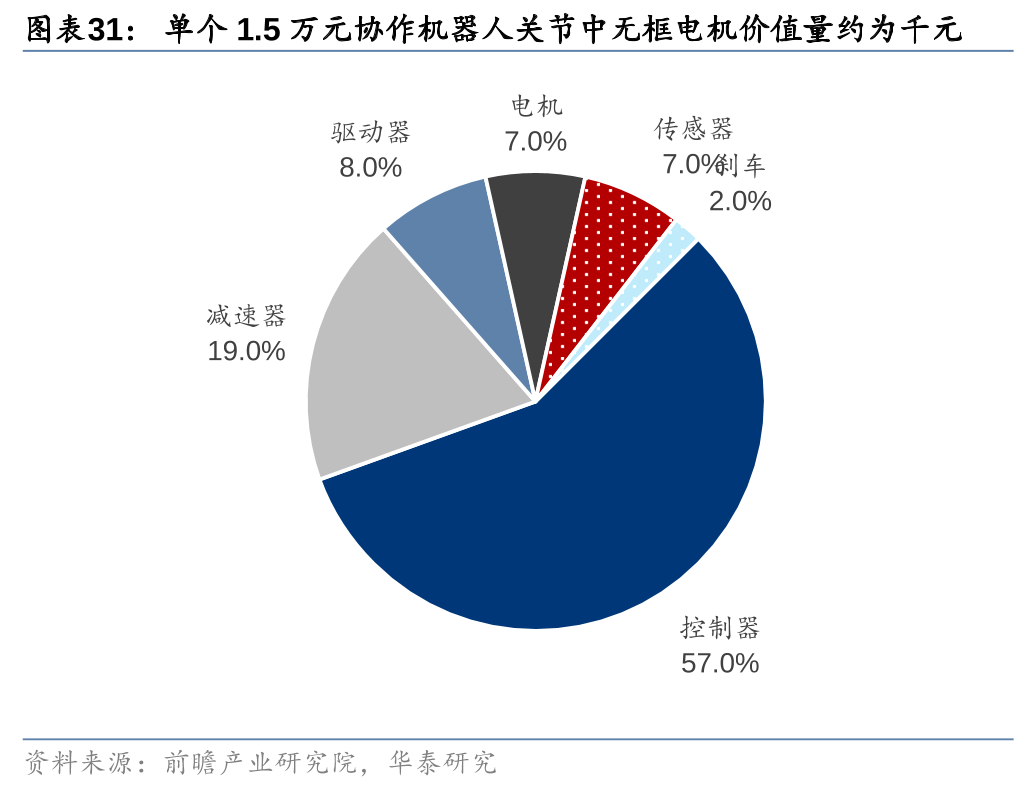
無框電機因其效率高、體積小、單位體積扭矩高適合用在旋轉關節中,單個價值量在千元左右。無框電機多采用大尺寸中空直徑和低重量高功率密度的設計,只有轉子和定子兩個部件,企業可以由此設計出自重輕,中空走線的關節。轉子通常是內部部件,由帶永磁體的旋轉鋼圓環組件構成,直接安裝在機器軸上。定子是外部部件,齒輪外部環繞鋼片和銅繞組,以產生緊密攀附在機器殼體內的電磁力。根據前瞻產業研究院測算,無框電機在1.5萬元的單個協作機器人關節中成本占比約為7%,價值量約為千元。

國內企業無框電機已達到國際水平。無框力矩電機相較于標準伺服電機技術難度更高,因為無框力矩電機屬于低壓電機,但其要求輸出的功率較大,同時又要求體積較小,便于安裝和節約空間。無框力矩電機主要應用在協作機器人領域,對整體安裝、固定的工藝及設計具有較高的要求。國外參與企業主要是科爾摩根、Moog、Maxon Motor等。
諧波減速器:高傳動比/輕重量/小體積,國產替代趨勢明顯
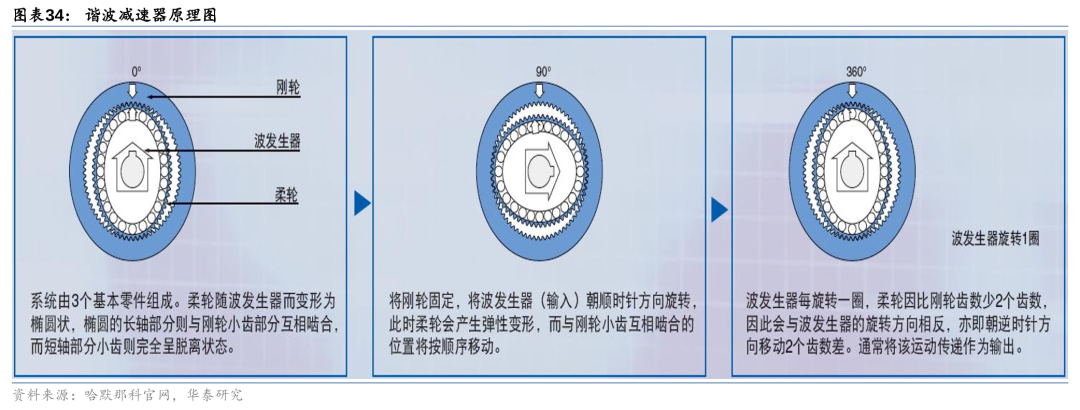
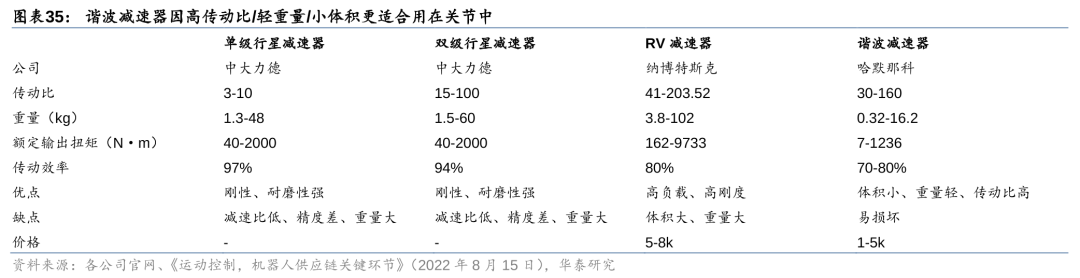
諧波減速器可以通過降低轉速而提高扭矩,因高傳動比/輕重量/小體積更適合用在機器人關節中。諧波減速器構造主要包括剛輪(帶有內齒圈的剛性齒輪)、柔輪(帶有外齒圈的柔性齒輪)、以及波發生器,通常采用波發生器主動-剛輪固定-柔輪輸出形式,當波發生器裝入柔輪內圓時,迫使柔輪產生彈性變形而呈橢圓狀,此時長軸處柔輪齒輪插入剛輪的輪齒槽內,為完全嚙合狀態;而短軸處則為脫開狀態,當波發生器連續轉動時,迫使柔輪不斷產生變形并產生了錯齒運動,從而實現波發生器與柔輪的運動傳遞。諧波減速器可以通過降低轉速而提高扭矩,以傳遞較大的負荷,克服伺服電機功率有限導致輸出的扭矩較小的缺陷。相較于行星減速器和RV減速器,其傳動比高、重量輕、體積小,更適合用在關節中。
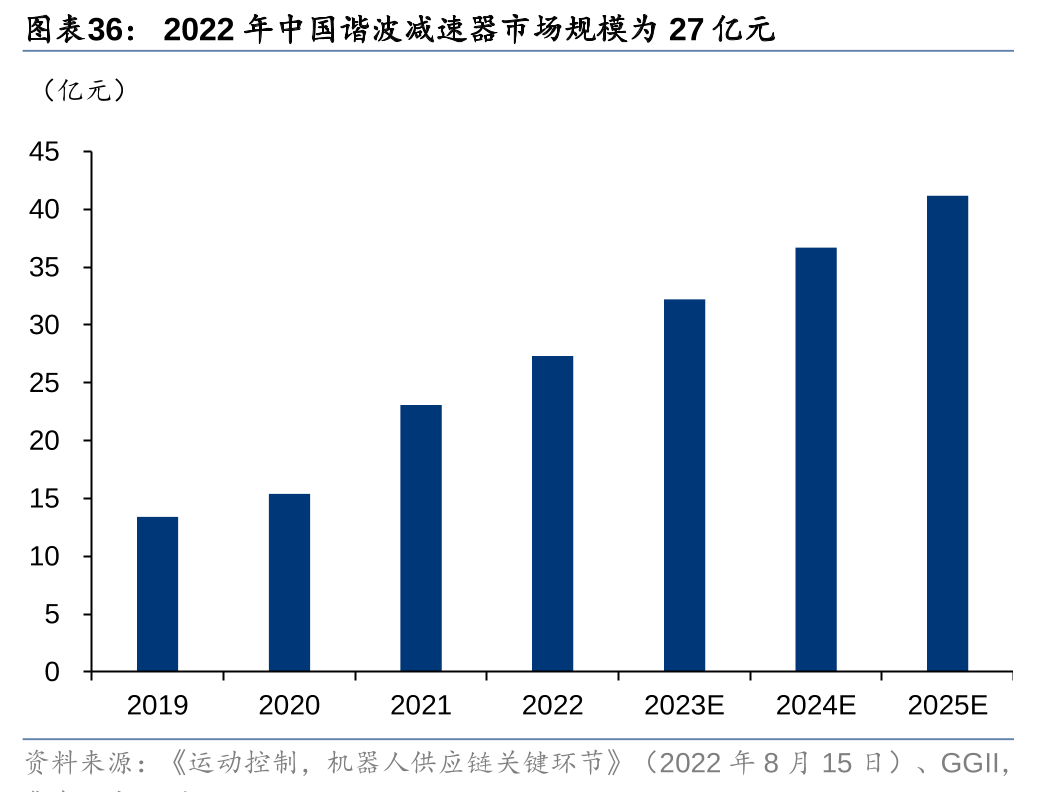
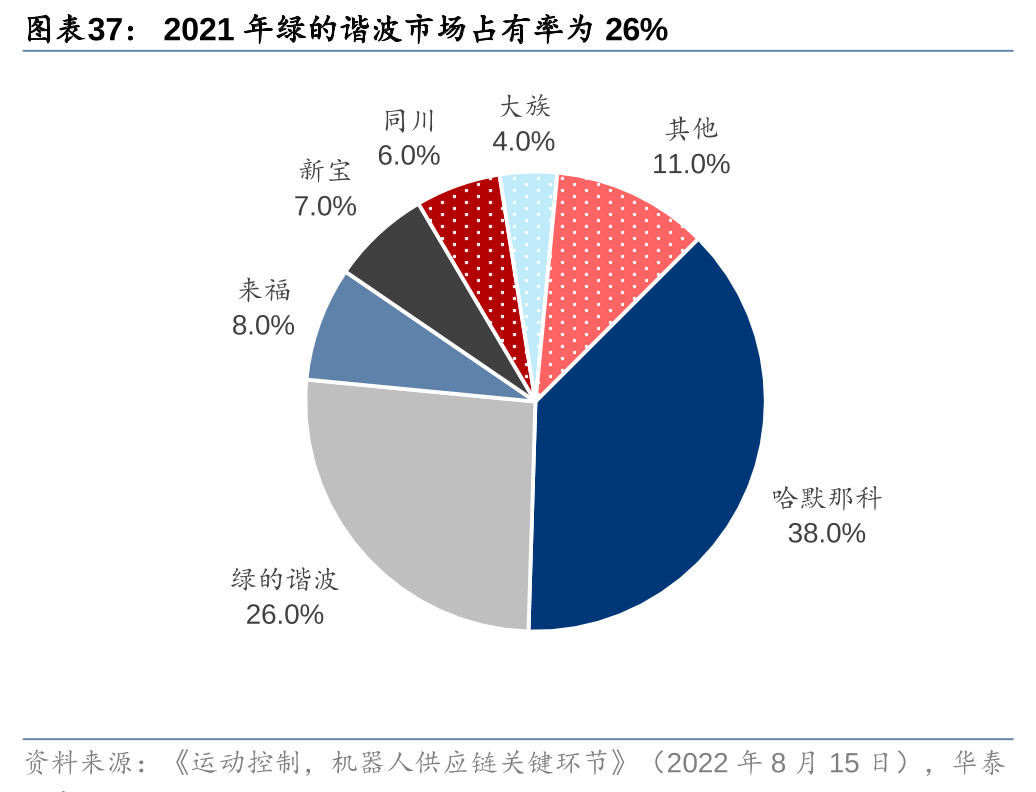
2022年中國諧波減速器市場規模為27億元,國產替代趨勢明顯。參照我們發布的報告《運動控制,機器人供應鏈關鍵環節》(2022年8月15日)中的測算方式,按照單臺工業機器人使用3臺諧波減速器,每臺諧波減速器為3000元,結合GGII披露的2022年中國工業機器人銷量30.3萬臺,我們測算出2022年中國諧波減速器市場規模為27.3億元。2021年綠的諧波市場占有率為26%,較2018年的20%顯著提升,國產替代趨勢明顯。
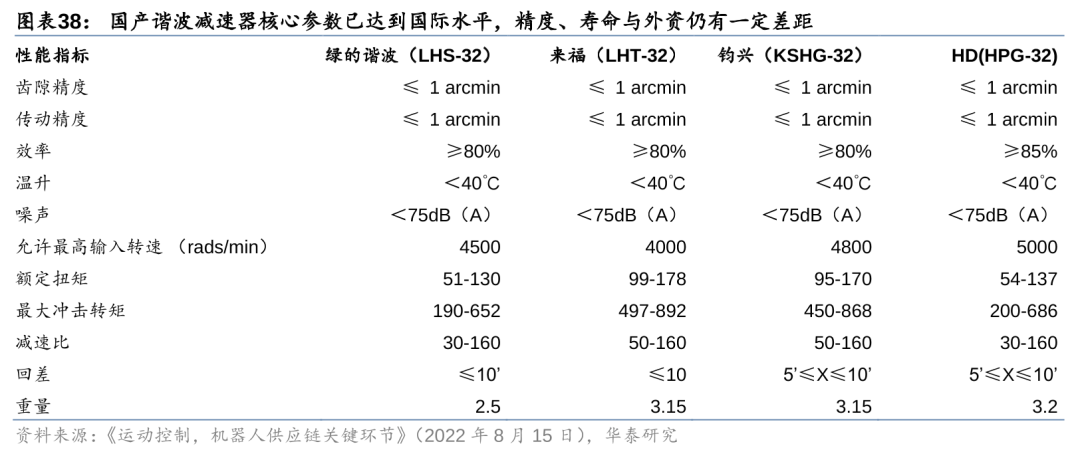
國產諧波減速器核心參數已達到國際水平,精度、壽命與外資仍有一定差距。在效率、減速比、傳動精度、扭矩剛度等關鍵指標參數上,國產諧波減速器已經基本達到了國際領先的水平,但是在使用壽命、故障率等方面仍有差距。一部分國產減速器長時間使用后仍有出現磨損、漏油、精度下降的情況,在產品穩定性和使用壽命上仍需提升。減速器對技術積累要求非常高,細小的工藝差距會影響減速器的精度、損耗速度和壽命。打破海外技術壁壘的關鍵為設備和制造工藝:1)除了綠的諧波等企業通過工藝、材料的改進解決設備卡脖子問題外,加速提高國產精密設備制造水平仍為關鍵。2)減速器屬于薄壁零件,如果熱處理技術不過關,會導致零件變形較大。
空心杯電機:靈巧手核心部件,大批量生產為難點
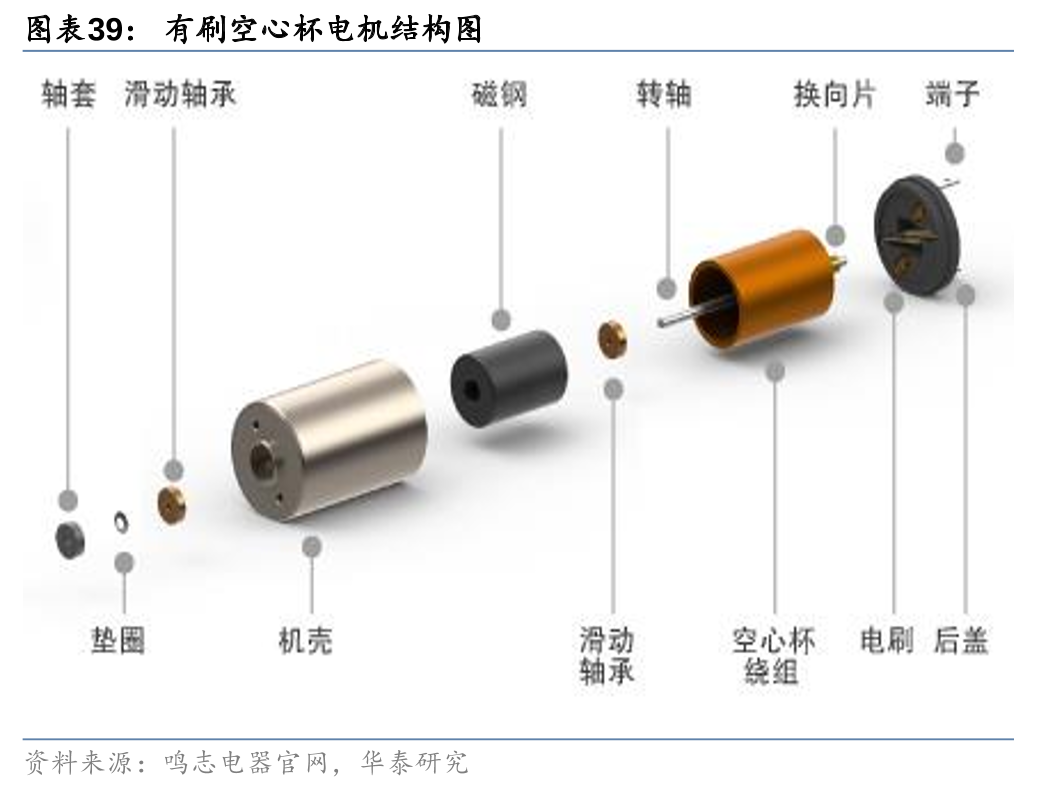
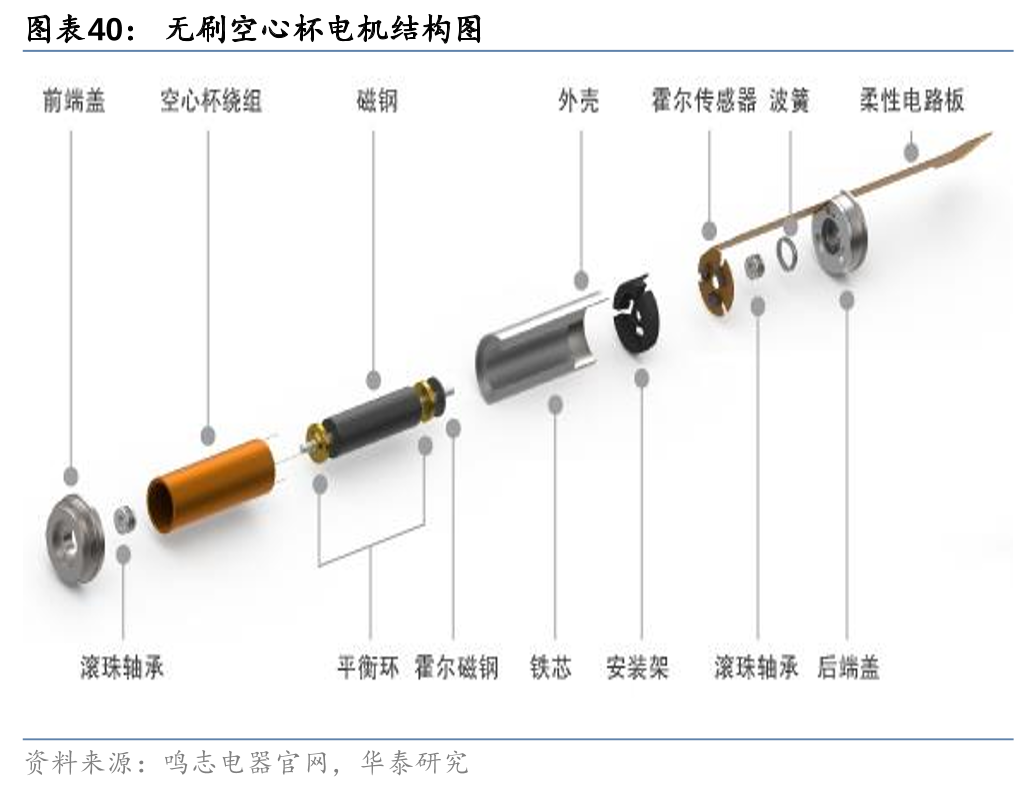
空心杯電機因其小體積,適合用于輕負載的靈巧手部位。空心杯電動機在結構上突破了傳統電機的轉子結構形式,采用的是無鐵芯轉子,也叫空心杯型轉子。這種新穎的轉子結構徹底消除了由于鐵芯形成渦流而造成的電能損耗。同時其重量、體積和轉動慣量大幅降低,從而減少了轉子自身的機械能損耗。由于轉子的結構變化而使電機的運轉特性得到了較大改善,不但具有突出的節能特點,更為重要的是具備了鐵芯電機所無法達到的控制和拖動特性。

空心杯電機應用領域廣泛,大批量生產為難點。空心杯電機用途廣泛,包括工業控制、軍工、機器人、高端機床等。根據江蘇雷利2023年3月1日披露的投資者調研紀要,德國Faulhaber和瑞士Maxon銷售的空心杯電機+齒輪箱+編碼器集成件年銷售額約32億歐元,產品主要面向軍工和工業市場。空心杯電機核心技術難點在于大批量生產和精密齒輪箱減速器。國內眾多廠商采用手工繞線的方式生產,在生產效率、產品壽命、精度方面存在劣勢。
風險提示
特斯拉機器人方案變更:目前特斯拉機器人最終零部件方案仍在迭代中,未來存在變化可能性,從而導致潛在供應鏈公司發生變化。
成本測算具有一定局限性:我們通過公開數據測算出的特斯拉機器人BOM表成本并不一定能代表其真實成本。
特斯拉機器人產業化不及預期:目前我們測算出特斯拉機器人成本較為昂貴,若未來其產業化降本速度不及預期,可能會影響供應鏈構成速度。
-
核心技術
+關注
關注
4文章
625瀏覽量
19599 -
工業控制
+關注
關注
37文章
1451瀏覽量
85830 -
人形機器人
+關注
關注
2文章
443瀏覽量
16550
原文標題:人形機器人迭代下供應鏈的新機遇
文章出處:【微信號:robotop2025,微信公眾號:每日機器人峰匯】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
阿普奇榮獲年度優秀供應鏈企業:2024年人形機器人行業的高光時刻
全球巨頭加速布局人形機器人賽道
泰科機器人獲獎,開啟人形機器人關節模組新動力


《人形機器人產業地圖(2024)》重磅發布!

廣和通成功入選2024人形機器人供應鏈優質企業
銀牛微電子入選2024人形機器人供應鏈優質企業

AI新質生產力 廣和通成功入選2024人形機器人供應鏈優質企業

AI新質生產力 | 廣和通成功入選2024人形機器人供應鏈優質企業

為何要做人形機器人?
全球人形機器人的創新發展與未來趨勢






 工商網監
工商網監
評論