 OSSD – 傳輸單比特安全數據
OSSD – 傳輸單比特安全數據
機器安全領域之外的任何人都可能不熟悉OSSD(輸出信號切換設備)。在這篇博客中,我將解釋
什么是OSSD
OSSD 邏輯
將 OSSD 替換為網絡連接
OSSD相關標準
希望,即使您是鐵桿機器安全人員,您也會在這方面找到有用的東西。希望如果您不是一個鐵桿機器安全人員,您仍然會發現它很有趣,并引發一些思考。
讓我們從一個定義開始。

圖 1 IEC 61496 系列的 OSSD 定義
該定義可在IEC 61496系列標準中找到,該標準涵蓋了激光掃描儀,光幕,3D TOF,立體相機及其在安全系統中的使用。因此,在激光掃描儀輸出端可以找到典型的OSSD,并發出有人進入某個區域,可能處于危險之中的信號,因此應該停止危險的機器。
OSSD 可以通過繼電器或固態邏輯實現。如今,固態解決方案因其可靠性和可測試性而受到青睞,其邏輯值在IEC 61131-2中給出,這是PLC(可編程邏輯控制器)系列標準的一部分,這是有意義的,因為OSSD經常從傳感器到PLC。

圖 2 IEC 61131-2 中的 OSSD 信號電平
如果OSSD位于傳感器上以檢測接近機器人的人,則當沒有人接近時,OSSD為ON(+11至+30V輸出),當檢測到人時,OSSD處于關閉狀態(-3V至+2V)。關閉包括0V的事實可確保在傳感器發生電源故障時機器人將停止。
因此,如果從邏輯門的角度考慮,則將兩個傳感器的輸出與AND函數而不是OR函數相結合。如果任一輸入為低電平,則 AND 門的輸出變為低電平。如果任一傳感器處于允許模式,則OR門的輸出將很高。
注意 - 在我的腦海中,我總是把這個混為一談。我希望機器人在傳感器 1 或傳感器 2 檢測到人時停止。0V或24V與OR門相結合,但提供24V,不會停止機器人。
由于OSSD可能會發生故障,因此它們通常是兩個并行的OSSD輸出,我們需要討論可能的故障模式。故障模式是通常的直流故障模型的各種組合,包括卡開、短路(包括與冗余 OSSD 短路相關的故障模式)。
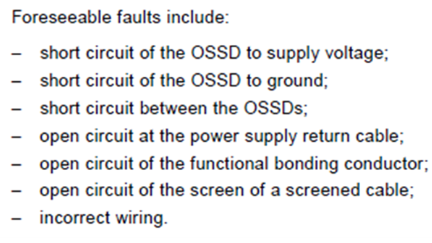
圖3 OSSD故障模型
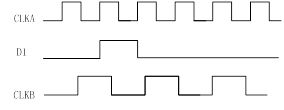
將時間測試脈沖中的窄偏移到低可以測試上述大多數情況 – 偏移意味著關閉脈沖之間的輕微延遲,因此兩個OSSD一起不低。如果兩者一起走低,則檢測為做空,如果不能低,則做空高,如果不能走高,則做空低。為了使這種測試模式正常工作,控制系統需要忽略非常窄的脈沖。

圖4 - OSSD診斷程序
單個網絡連接可用于替換兩個 OSSD。顯然,這增加了很多復雜性,您還必須擔心網絡最壞情況下的響應時間。因此,許多傳感器同時具有聯網和OSSD輸出。它還允許給定的傳感器與各種邏輯塊輕松集成。

圖 5 - IEC 61496 系列區分點對點網絡連接和路由連接
出于我不明白的原因,IEC 61496系列標準在傳感器和通信接口之間插入了與安全相關的數據接口。然后,通信接口將符合IEC 61508-2中的黑色通道或白色通道原理。無論哪種方式,診斷現在都比OSSD輸出復雜得多。
正如我所說,OSSD 比網絡連接簡單得多,這在下面的警告中捕獲,來自我不記得的標準。
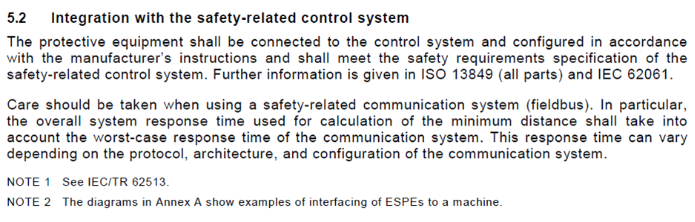
圖 6 - 來自未知標準的關于使用通信接口而不是更簡單的 OSSD 有線連接的警告
自從ADI收購Maxim以來,我們有了IO-link器件產品組合,我必須更詳細地研究這些器件。IO-link 的信令電平也符合 IEC 61131-2,但 IO-link 可以傳輸實際的數字數據。
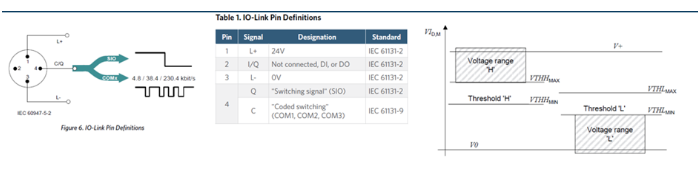
圖7 - IO鏈路的信號電平和波特率
審核編輯:郭婷
-
傳感器
+關注
關注
2552文章
51246瀏覽量
754875 -
繼電器
+關注
關注
132文章
5356瀏覽量
149232 -
plc
+關注
關注
5013文章
13331瀏覽量
464183
發布評論請先 登錄
相關推薦
網絡高效安全數據傳輸方法設計
8PSK全數字解調技術的實現
STM8L15x系列微控制器是否有安全數據表?
安全數據庫如何管理
用于配置兩個QSPI將序列數據比特傳輸到其它設備
安全數據交換技術在HIS中的應用
一種基于監督機制的工業物聯網安全數據融合方法

安全數據的轉發算法
WSN的動態分簇安全數據匯聚算法
單比特雷達成像與對抗研究報告
所有的單比特信號跨時鐘域都可以用敲兩級DFF的辦法處理嗎?
具有可配置電壓轉換的 SN74AXC1T45 單比特位雙電源總線收發器數據表






 工商網監
工商網監
評論