


PWM 比較器的功能
還是以本系列文章中,用到的三相兩電平逆變器為控制對(duì)象。下圖是正弦波調(diào)制(SPWM)的三相兩電平逆變器的波形。
輸入的是三相的正弦波信號(hào),三角載波與正弦信號(hào)波進(jìn)行比較,當(dāng)正弦信號(hào)波的值大于三角載波的值,輸出“1”,否則,就輸出“0”;PWM比較器一共生成6個(gè)PWM信號(hào),控制6個(gè)IGBT的開(kāi)通和關(guān)斷。PWM比較器輸出“1”控制IGBT開(kāi)通,“0”信號(hào)IGBT關(guān)斷。控制逆變器輸出的三相相電壓和三相線電壓如下圖所示。
對(duì)于三相兩電平逆變器,為了防止上下橋臂同時(shí)導(dǎo)通而短路,PWM比較器還需要插入死區(qū)時(shí)間。
此外,為了讓電流、速度和位置采樣與PWM占空比的更新同步,以及控制器算法模型的觸發(fā)運(yùn)行,必須還有中斷觸發(fā)信號(hào)生成功能。
因此整個(gè)PWM比較器包括四部分:
(1) 三角載波生成;
(2) 信號(hào)比較,生成PWM控制信號(hào);
(3) 插入死區(qū)時(shí)間;
(4) 中斷觸發(fā)信號(hào)生成;
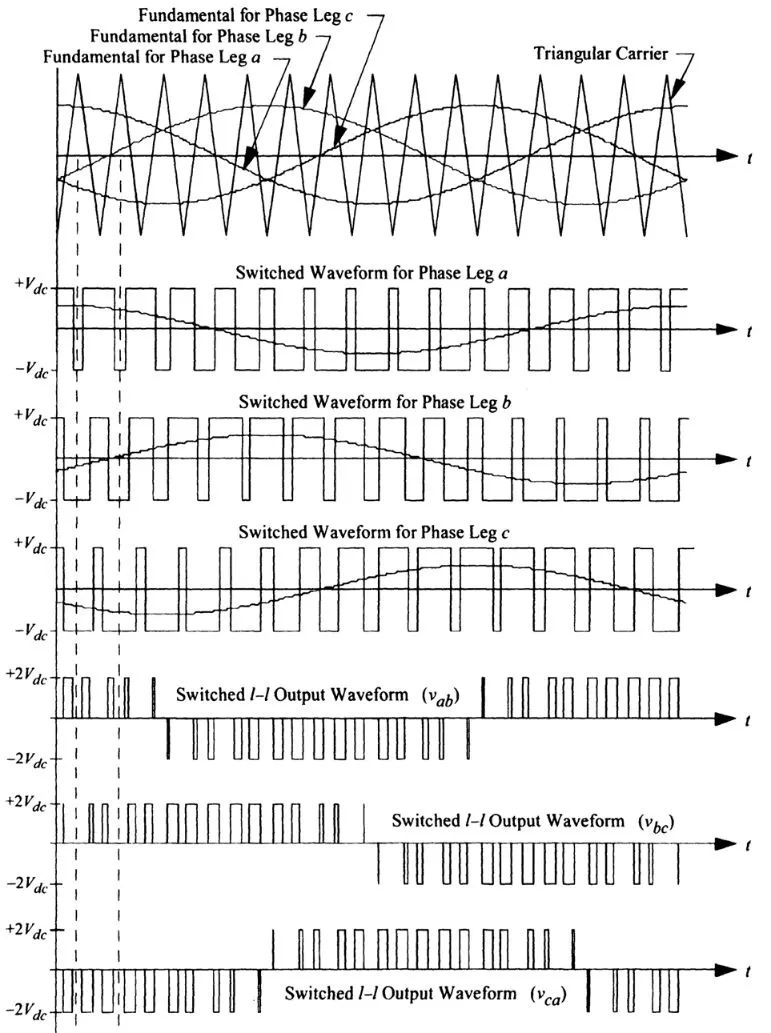
正弦波調(diào)制(SPWM)的三相兩電平逆變器的波形
三角載波生成
因?yàn)槿禽d波生成的模型是在FPGA中運(yùn)行的,因此數(shù)據(jù)類(lèi)型需要整型。
最方便的方法就是使用Simulink的HDL Coder模型庫(kù)中的HDL Counter模塊。通過(guò)控制輸入端口dir控制HDL Counter模塊的計(jì)數(shù)方向。
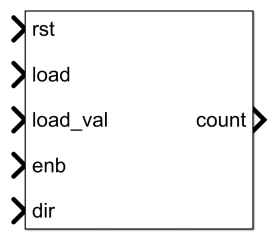
HDL Counter模塊
示例模型如下:
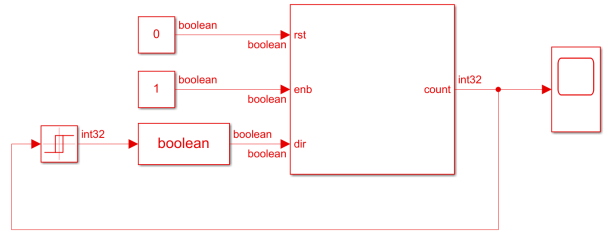
三角載波生成的Simulink模型
仿真步長(zhǎng)為1e-8,Relay 模塊的Switch on point為10000,Switch off point為0,輸出“0”或者“1” 控制HDL Counter模塊的計(jì)數(shù)方向,生成0~10000的三角波,頻率為5kHz。
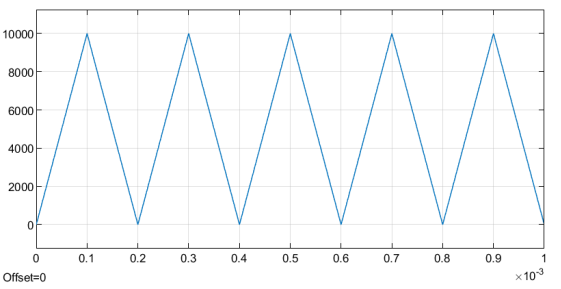
三角載波信號(hào)
PWM 信號(hào)生成
三角載波與信號(hào)波進(jìn)行比較,當(dāng)信號(hào)波的值大于三角載波的值,輸出“1”,否則,就輸出“0”;PWM比較器一共生成6個(gè)PWM信號(hào),控制6個(gè)IGBT的開(kāi)通和關(guān)斷。
此功能的Simulink模型如下:
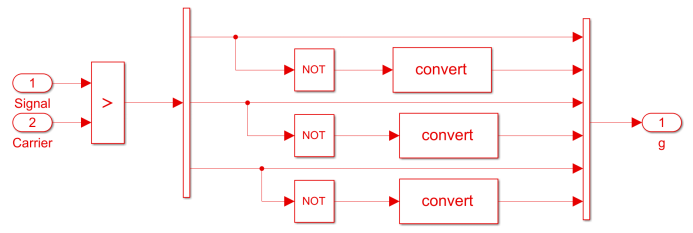
PWM信號(hào)生成的Simulink模型
死區(qū)時(shí)間
通常死區(qū)時(shí)間的插入通過(guò)增加PWM信號(hào)的開(kāi)通延時(shí)實(shí)現(xiàn)的。
簡(jiǎn)單說(shuō)就是:如果PWM信號(hào)由“1”變“0”,即由開(kāi)通變?yōu)殛P(guān)斷,則馬上關(guān)斷;如果PWM信號(hào)由“0”變“1”,即由關(guān)斷變?yōu)殚_(kāi)通,則延時(shí)T_delay再開(kāi)通;此功能的Simulink模型如下,C_delay端口為輸開(kāi)通延時(shí)計(jì)數(shù)值。
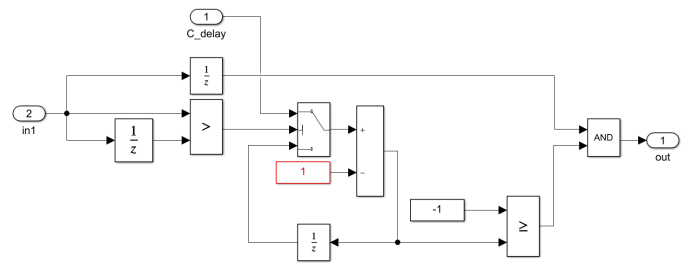
死區(qū)時(shí)間的Simulink模型
中斷觸發(fā)信號(hào)生成
此功能比較簡(jiǎn)單,Simulink模型如下圖所示,在三角波的底點(diǎn)和頂點(diǎn)都產(chǎn)生中斷,如果只在底點(diǎn)或者只在頂點(diǎn),可以根據(jù)需要修改即可。

中斷觸發(fā)信號(hào)生成的Simulink模型
以上模型皆可以通過(guò)Simulink的HDL Coder工具生成HDL代碼,部署至Speedgoat的FPGA板卡。
-
IGBT
+關(guān)注
關(guān)注
1278文章
4076瀏覽量
254920 -
三相逆變器
+關(guān)注
關(guān)注
3文章
94瀏覽量
19388 -
PWM比較器
+關(guān)注
關(guān)注
0文章
9瀏覽量
8072 -
FPGA開(kāi)發(fā)板
+關(guān)注
關(guān)注
10文章
125瀏覽量
31997 -
simulink仿真
+關(guān)注
關(guān)注
0文章
75瀏覽量
8784
發(fā)布評(píng)論請(qǐng)先 登錄
基于模型的設(shè)計(jì)(MBD)的深入討論
電動(dòng)助力轉(zhuǎn)向EPS——理論公式推導(dǎo)及simulink模型
Simulink模型生成代碼
如何建立一個(gè)simulink模型

永磁同步電機(jī)控制系統(tǒng)仿真—PWM比較器的Simulink模型






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論