 機器人應用的速度和分離監控
機器人應用的速度和分離監控
當人們想到協作機器人時,他們通常會想到UR5,Kuka LRB系列,Fanuc CR-35iA,ABB YuMi等。協作機器人作為工業機器人的一種形式與服務機器人的不同之處在于,它們是為工業環境設計的,用于建造東西,而不是幫助人們的日常生活,但在這兩種情況下,它們都是為與人類互動而設計的。
通常,當人們想到協作機器人時,他們會想到實現功率和力限制(PFL)的機器人,我希望在本系列的下一篇博客中對此進行描述。然而,今天我將重點介紹工業機器人安全標準ISO 5-10:4的子條款10218.1.2011中定義的速度和分離監控(SSM)。
使用SSM,可以監控機器人周圍的區域,如果有人接近機器人,它最初會減速并最終停止。目標是確保機器人在與人類或部分人類接觸之前停止。與PFL相比,SSM的優勢在于機器人應該能夠運行得更快,從而提高生產率。PFL速度必須很慢,以便在發生碰撞時保持較低的力。使用SSM,機器人不需要立即阻止某人進入某個區域,而是可以監視該人,他們的行進方向,并改變其姿勢以遠離他們,或者在他們靠近時逐漸減速。最終,機器人/協作機器人可能必須像使用PFL一樣慢地運行,以便這兩種模式實際上是互補的。放慢速度通常比停止更有效(我總是會說,但我相信有人會想出一個角落案例來證明我是錯的)。然后,當人離開時,機器人可以再次開始更快地移動。永遠記住,工廠車間的目標是實現盡可能高的生產率,從而需要保持安全。
,在距離綠線一定距離處,機器人可以全速運行,然后在人到達紅線之前完全停止。在兩者之間,機器人開始減速。可能會在橙色線上發出警告,但輸出信號切換設備 (OSSD) 在紅線處處于活動狀態,機器人應停止或進入 PFL 模式。
線之間距離背后的數學如下所示。它考慮了機器人停止需要多長時間、機器人移動的速度、機器人運動部件的質量、機器人手臂的長度等。通常,假設在工廠車間不允許跑步,并且假設最大步行速度為 1.6 米/秒。
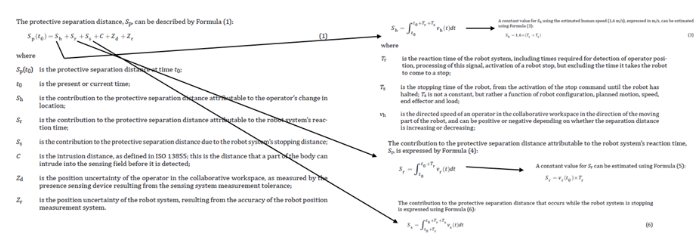
圖 3 – 基于 ISO TS 15066 的保護性間隔距離計算
ISO TS 15066的下圖顯示了上述的實際影響。雖然ISO TS 15066目前是ISO 10218的配套技術規范,但ISO 3的修訂版10218將于2022年底發布,ISO TS 15066的內容將在ISO 10218標準范圍內。
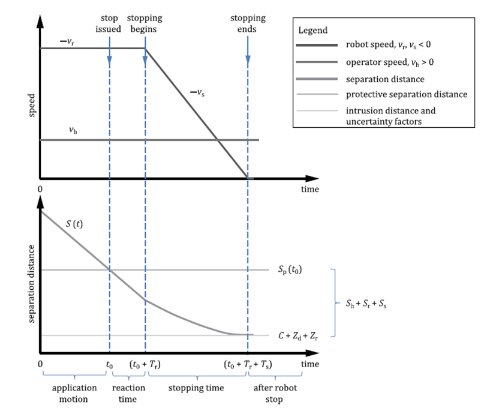
圖4 – ISO TS 15066:2016圖3
ISO 13855 中也給出了進一步的指導。
ISO 10218-2要求用于實施SSM的傳感器(ESPE和AOPD)應符合IEC 61496系列的相關部分。在本系列的后續博客中,我將討論IEC 61496系列,但現在您只需要知道IEC 61496-2涵蓋光幕,IEC 61496-3涵蓋激光掃描儀和3D TOF。
顯然,使用激光掃描儀、光幕和 3D ToF 傳感器并不適合所有應用。例如,如果可以從機器人單元中彈出某些東西,那么某種物理防護或圍欄可能會更好。
如果您使用的是電敏防護設備(ESPE),那么與激光掃描儀相比,3D ToF可能具有優勢。例如,激光掃描儀僅在單個平面上運行。通常,使用激光掃描儀時,被監控的平面接近地面,因此激光掃描儀無法檢測到伸出的手,但可以檢測到地板上的尸體。但是,3D ToF相機可以進行三維監控,這意味著您不必為伸出的手留出額外的0.85米。然而,通常情況下,激光掃描儀的范圍和FOV(視場)更大(閃光燈與點照明)。為相機設置270度FOV很困難,但對于激光掃描儀來說很常見。但是,由于激光掃描儀內的移動部件,增加的視場會帶來可靠性問題。基于攝像頭的系統沒有移動部件。對于mobots,3D監控可用于檢測激光掃描儀可能遺漏的懸垂物體,并且來自3D監控的數據也可用于物體分類,以便機器人在其他機器人面前可以表現得不同而不是人。通過相機生成的豐富數據實現對象分類。為了安全起見,相機和激光掃描儀系統也可用于實現導航等非安全功能。
無論涉及何種技術(掃描儀或相機),典型要求都是符合 ISO 13849 的 PL d、符合 IEC 2/IEC 62061 的 SIL 61508 和符合 IEC 3 的 61496 類。大多數解決方案都針對所有這些指定。
審核編輯:郭婷
-
機器人
+關注
關注
211文章
28390瀏覽量
206950 -
攝像頭
+關注
關注
59文章
4837瀏覽量
95607 -
激光掃描
+關注
關注
0文章
115瀏覽量
11435
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論