") PMD在獲得鏡面三維形狀方面的最新進展
PMD在獲得鏡面三維形狀方面的最新進展
0摘要
相位測量偏轉(zhuǎn)法(PMD)具有動態(tài)范圍大、非接觸式操作、全場測量、采集速度快、精度高、自動數(shù)據(jù)處理。我們回顧了 PMD 的最新進展。下面介紹幾種基于條紋反射的 PMD 方法,介紹 PMD 的基本原理。首先,回顧了用于測量具有不連續(xù)表面的鏡面物體的 3D 形狀的直接 PMD(DPMD)方法。DPMD 方法建立了相位和深度數(shù)據(jù)之間的直接關(guān)系,無需梯度積分程序。其次,回顧了一種用于測量鏡面反射物體的紅外 PMD (IR-PMD) 方法。由于采用紅外光作為光源,IR-PMD法對環(huán)境光對測量結(jié)果的影響不敏感,測量精度高。第三,回顧了一種通過結(jié)合條紋投影輪廓法和 DPMD 來測量具有不連續(xù)表面的部分反射物體的 3D 形狀的方法。然后,分析了主要包括相位誤差和幾何校準(zhǔn)誤差的誤差源對測量結(jié)果的影響,并對3D形狀測量系統(tǒng)的性能進行了評估。最后,討論了PMD未來的研究方向。
1引言
三維(三維)形狀測量技術(shù)在各種應(yīng)用中正變得越來越重要。1-5人們提出了許多測量方法來重建物體表面的三維形狀,特別是對于具有擴散表面的物體6-10。然而,對鏡面物體進行三維形狀測量的研究仍處于早期階段。由于鏡面物體表面的反射特性,因此對于測量其三維形狀是一個具有挑戰(zhàn)性的問題。廣泛的研究工作已經(jīng)實施,以提高測量精度,動態(tài)范圍,和速度11–13。 根據(jù)測量原理的不同,測量鏡面表面的三維形狀測量可分為接觸法14和非接觸法。坐標(biāo)測量機(CMM)14是測量高光表面的首選,通過接觸方法沿二維(2D)方向掃描。雖然CMM有成本高、速度低、表面劃傷等缺點,29由于觸摸探針的尺寸檢測精度高,它仍然是最廣泛使用的鏡面測量方法。然而,傳統(tǒng)的CMM由于缺乏旋轉(zhuǎn)自由度而受到限制,因此不能用于復(fù)雜曲面和自由形式曲面的數(shù)字化。干涉儀20-22和偏轉(zhuǎn)儀15-18、23-28是兩個競爭對手30,31 非接觸測量方法中具有較高的測量精度和分辨率。干涉測量是一種利用干涉現(xiàn)象獲得簡單連續(xù)表面的距離信息的技術(shù)。由于傳統(tǒng)的光學(xué)干涉測量技術(shù)對環(huán)境噪聲非常敏感,如機械振動、空氣湍流和溫度漂移。在實際測量中,三維形狀測量的結(jié)果會受到這些噪聲的影響。為了解決這個問題,穆哈默達薩利等人。33提出了一種利用波長掃描干涉儀(WSI)測量微尺度和納米尺度區(qū)域表面的新方法,它可以抵御環(huán)境噪聲。在該方法中,將WSI和聲光可調(diào)諧濾波技術(shù)一起用于測量具有大步高的表面。Davila22提出了一種利用多種光源進行波長掃描干涉測量的傳感方法。該方法可以成功地降低環(huán)境噪聲,提高深度分辨率。然而,上述這些方法難以測量復(fù)雜的非球面鏡或自由形式的鏡面物體,如陡坡和/或大尺寸的表面,因為干涉測量通常需要參考。近年來,許多研究人員通過研究偏轉(zhuǎn)法來測量具有極大彎曲和/或大尺度表面的自由形態(tài)鏡面物體。相位測量偏度法(PMD)是獲取鏡面表面形式信息的最典型的有效方法之一。PMD因其動態(tài)范圍大、非接觸操作、全場測量、采集快、高精度、自動數(shù)據(jù)處理等優(yōu)點,近年來得到了廣泛的研究23–28。 張志勇等人。34簡要回顧了PMD最近初步工作的進展。在本文中,我們將更詳細地回顧PMD的最新技術(shù),主要包括PMD的基本原理、PMD的進展、PMD的錯誤源分析、挑戰(zhàn)和進一步的發(fā)展。在第二節(jié)中。2、根據(jù)幾種基于條紋反射的PMD方法,介紹了PMD的基本原理和概念。第三節(jié)回顧了PMD的進展。首先,提出了一種直接PMD(DPMD)方法,用于測量具有不連續(xù)表面的鏡面物體的三維形狀。然后,回顧了一種紅外PMD(IR-PMD)方法對鏡面物體的測量方法。由于使用紅外光作為光源,因此IR-PMD方法對環(huán)境光的影響不敏感,具有較高的測量精度。最后,綜述了一種結(jié)合條紋投影輪廓測量法(FPP)和DPMD來測量具有不連續(xù)表面的部分反射物體的三維形狀的方法。下面的秒。4將分析誤差源的影響,包括相位誤差的影響(由成像和投影系統(tǒng)的非線性影響,顯示屏。
2 PMD方法原理
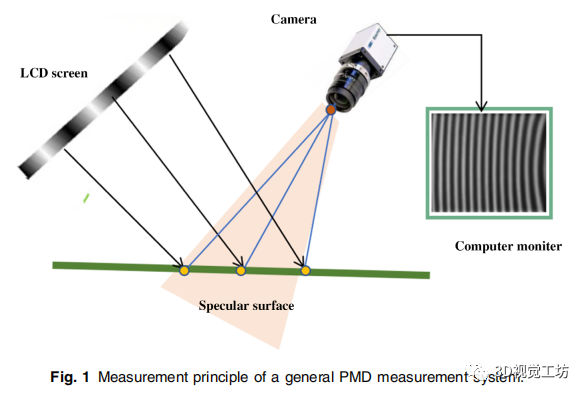 PMD的基本原理取決于光的反射定律。圖1顯示了一個通用PMD測量系統(tǒng)的主要設(shè)備,該系統(tǒng)包括一個數(shù)碼相機、液晶顯示器(LCD)屏幕、鏡面表面和計算機顯示器。液晶顯示屏可以顯示由計算機產(chǎn)生的相移正弦條紋圖案。被測試的鏡面物體與LCD屏幕的對面定位以反射入射光,然后成像設(shè)備可以從不同的視點同時捕捉由目標(biāo)表面調(diào)制的變形條紋圖案。然后,根據(jù)變形的條紋圖樣計算出相位數(shù)據(jù)。經(jīng)過系統(tǒng)校準(zhǔn)后,利用相位信息得到鏡面面的梯度數(shù)據(jù)。最后,通過整合斜率數(shù)據(jù),重建了目標(biāo)表面的三維全局形狀16,18,35–37。
PMD的基本原理取決于光的反射定律。圖1顯示了一個通用PMD測量系統(tǒng)的主要設(shè)備,該系統(tǒng)包括一個數(shù)碼相機、液晶顯示器(LCD)屏幕、鏡面表面和計算機顯示器。液晶顯示屏可以顯示由計算機產(chǎn)生的相移正弦條紋圖案。被測試的鏡面物體與LCD屏幕的對面定位以反射入射光,然后成像設(shè)備可以從不同的視點同時捕捉由目標(biāo)表面調(diào)制的變形條紋圖案。然后,根據(jù)變形的條紋圖樣計算出相位數(shù)據(jù)。經(jīng)過系統(tǒng)校準(zhǔn)后,利用相位信息得到鏡面面的梯度數(shù)據(jù)。最后,通過整合斜率數(shù)據(jù),重建了目標(biāo)表面的三維全局形狀16,18,35–37。 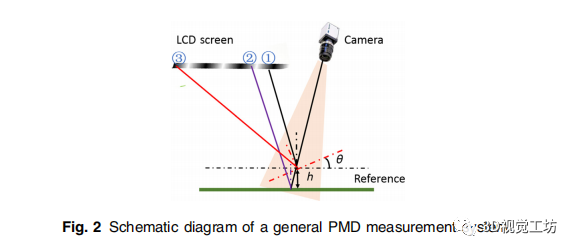 圖2為通用PMD測量系統(tǒng)的示意圖。假設(shè)以綠線顯示的參考表面與顯示屏幕平行。h為被測點的高度,對應(yīng)點相對于參考平面的角度變化為θ。在這里,θ也表示斜率。有許多可能的高度和坡度組合來解釋由相機探測射線觀察到的相位點。和被測量的目標(biāo)表面的斜率變化,條紋圖案在①位置的像素值在CCD平面上成像。如果僅有高度變化,則條紋圖案在②處的像素值在CCD平面上的相同位置成像。如果高度和斜率都發(fā)生了變化,則條紋圖案在位置③處的像素值也會在CCD平面上的相同位置上進行成像。因此,傳統(tǒng)的PMD方法不能直接從相位信息中獲取高度數(shù)據(jù)。
圖2為通用PMD測量系統(tǒng)的示意圖。假設(shè)以綠線顯示的參考表面與顯示屏幕平行。h為被測點的高度,對應(yīng)點相對于參考平面的角度變化為θ。在這里,θ也表示斜率。有許多可能的高度和坡度組合來解釋由相機探測射線觀察到的相位點。和被測量的目標(biāo)表面的斜率變化,條紋圖案在①位置的像素值在CCD平面上成像。如果僅有高度變化,則條紋圖案在②處的像素值在CCD平面上的相同位置成像。如果高度和斜率都發(fā)生了變化,則條紋圖案在位置③處的像素值也會在CCD平面上的相同位置上進行成像。因此,傳統(tǒng)的PMD方法不能直接從相位信息中獲取高度數(shù)據(jù)。
2.1 PMD系統(tǒng)設(shè)置
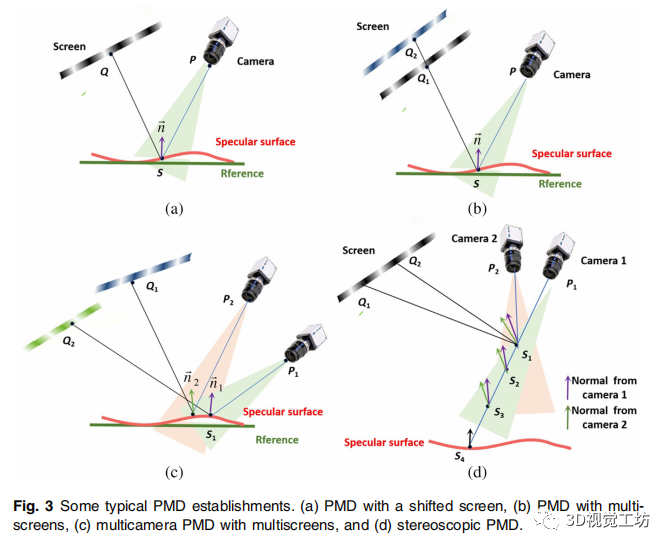 一般來說,傳統(tǒng)的PMD分別顯示和捕獲兩個方向的正弦條紋圖案,以獲得局部表面梯度的兩個分量,這是一個降低測量速度的過程。劉等人。提出了一種在液晶顯示屏上顯示交叉條紋圖案的技術(shù),使PMD能夠通過條紋圖案的一維平移來實現(xiàn),而不是普通的二維平移18。但是,由于積分過程,重建形狀的每個點都取決于周圍點的斜率,并且必須仔細考慮表面的規(guī)律性。35-37傳統(tǒng)PMD中的集成步驟不一定會積累隨機誤差,但往往會消除測量噪聲。然而,由于梯度積分的方法,上述那些基于PMD的方法只適用于測量具有連續(xù)表面的鏡面物體。為了克服經(jīng)典PMD中的挑戰(zhàn),提出了幾種不同類型的正則化方法,并針對實際測量中的不同要求設(shè)置有相應(yīng)的設(shè)置38–48。一些典型的PMD機構(gòu)與附加部件(如屏幕或攝像頭)如圖所示3.
一般來說,傳統(tǒng)的PMD分別顯示和捕獲兩個方向的正弦條紋圖案,以獲得局部表面梯度的兩個分量,這是一個降低測量速度的過程。劉等人。提出了一種在液晶顯示屏上顯示交叉條紋圖案的技術(shù),使PMD能夠通過條紋圖案的一維平移來實現(xiàn),而不是普通的二維平移18。但是,由于積分過程,重建形狀的每個點都取決于周圍點的斜率,并且必須仔細考慮表面的規(guī)律性。35-37傳統(tǒng)PMD中的集成步驟不一定會積累隨機誤差,但往往會消除測量噪聲。然而,由于梯度積分的方法,上述那些基于PMD的方法只適用于測量具有連續(xù)表面的鏡面物體。為了克服經(jīng)典PMD中的挑戰(zhàn),提出了幾種不同類型的正則化方法,并針對實際測量中的不同要求設(shè)置有相應(yīng)的設(shè)置38–48。一些典型的PMD機構(gòu)與附加部件(如屏幕或攝像頭)如圖所示3.
圖 3(a) 顯示了一種將 LCD 屏幕用作漫射光源的測量方法,可以將其垂直移動到兩個或多個不同的位置,以消除梯度積分引起的誤差累積38-40。然而,液晶屏幕的移動增加了系統(tǒng)的不穩(wěn)定性和測量時間。
為了解決不適定的問題,Li等人。41提出了一個簡化的PMD系統(tǒng),使用透明屏幕和液晶屏幕,避免了液晶屏幕的移動。在李的系統(tǒng)中,兩個屏幕可以固定在一個相對自由的位置,相機的光線可以通過透明屏幕到液晶屏幕。
圖中簡單模型如圖所示3.(b)用于描述具有多屏幕的PMD方法。反射的光線可以由多屏幕上的兩個或多個交點來確定。
在圖中3(c)、多屏幕和多圖像可以從最小法向量搜索高度值。
圖3(d)描述了基于多個成像傳感器的立體PMD,46-48技術(shù)。在該技術(shù)中,兩個攝像機計算的法向量應(yīng)相同,然后通過匹配兩個攝像機計算的法向量,可以得到測量表面的梯度和三維數(shù)據(jù)。然而,在搜索空間點時,它需要花費大量的時間。
與我們對PMD的分類相似,Xu等人。52人將這些PMD方法分為基于單屏幕和基于傳感器的PMD、基于多屏幕的PMD和基于多傳感器的PMD。
2.2 相位提取
一旦捕獲了條紋圖案,就需要使用成熟的條紋分析算法來提取條紋圖案的相位。下面還問哦同期包括相包裝和相展開。包裹的相位數(shù)據(jù)可以使用單幀方法1、53-55(基于變換的方法,包括傅里葉變換和小波變換)和多幀方法56(多步移相算法)進行計算。采用空間相位展開和時間相位展開兩種方法來計算絕對相位數(shù)據(jù)。在PMD系統(tǒng)中,53,57-65所需的相位值是絕對相位;因此,所有測量值的邊緣順序應(yīng)該是一致的。
3 PMD方法優(yōu)勢
為了進一步推進PMD的發(fā)展,已經(jīng)開發(fā)了三種新的DPMD、49-51IR-PMD(MPMD)、66、67和測量部分反射表面的新方法68,這將分別在以下三個部分進行回顧
3.1 直接相位測量測偏光度法
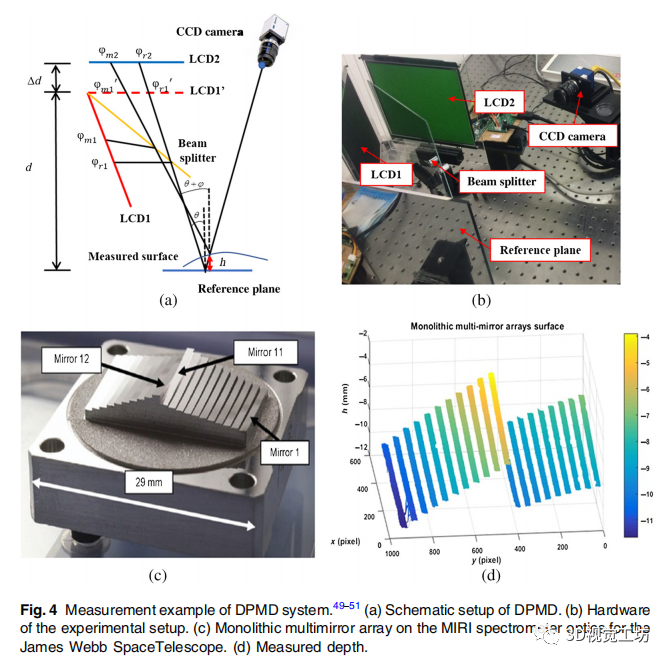 DPMD是一種基于多個顯示屏幕的PMD技術(shù),它建立了相位和深度之間的直接關(guān)系,從相位數(shù)據(jù)中直接計算出鏡面物體的三維形狀,而不是整合局部斜率數(shù)據(jù)。49-51測量系統(tǒng),如圖4所示,通過在兩個液晶屏幕上顯示相同的條紋圖案來獲得鏡面物體的三維形狀。 圖4為DPMD方法及其相應(yīng)的系統(tǒng)設(shè)置示意圖。實驗結(jié)果表明了該方法的測量能力。具體來說,圖4.(a)表示測量原理。該系統(tǒng)設(shè)置包括兩個液晶顯示屏,一個分束器(BS)和一個攝像頭。其中,BS位于LCD1和LCD2之間,使LCD1的虛擬圖像LCD1’與LCD2平行,相機與LCD2以一定角度捕捉被測鏡面反射的變形條紋。.此外,利用參考文獻獲得了DPMD系統(tǒng)的幾何參數(shù),需要平行于兩個屏幕進行調(diào)整。Δd和d分別表示LCD1’與LCD2之間的距離,以及LCD1’與參考平面之間的距離。兩條光線被顯示并通過測量表面和參考反射到CCD相機。兩個入射光線的絕對相位在參考平面上表示為 φr1(或 φr10)和 φr2,以及 φm1(或 φm10)和 φm2 在被測表面上。入射射線與參考法向量的角以及入射射線與測量表面法向量的角分別為θ和θtφ。h是被測量的鏡面表面相對于參考平面的高度。硬件系統(tǒng)如圖所示。4(b) 使用圖中開發(fā)的DPMD系統(tǒng)測量了具有多個鏡面表面的詹姆斯·韋伯太空望遠鏡的MIRI光譜儀光學(xué)。4(c),測量到的鏡面物體的深度如圖所示。4(d).測量的鏡面表面的深度數(shù)據(jù)可以根據(jù)公式得到。具有校準(zhǔn)幾何參數(shù)(Δd和d)和已知相位值(φm1、φm2、φr1和φr2)的(1):
DPMD是一種基于多個顯示屏幕的PMD技術(shù),它建立了相位和深度之間的直接關(guān)系,從相位數(shù)據(jù)中直接計算出鏡面物體的三維形狀,而不是整合局部斜率數(shù)據(jù)。49-51測量系統(tǒng),如圖4所示,通過在兩個液晶屏幕上顯示相同的條紋圖案來獲得鏡面物體的三維形狀。 圖4為DPMD方法及其相應(yīng)的系統(tǒng)設(shè)置示意圖。實驗結(jié)果表明了該方法的測量能力。具體來說,圖4.(a)表示測量原理。該系統(tǒng)設(shè)置包括兩個液晶顯示屏,一個分束器(BS)和一個攝像頭。其中,BS位于LCD1和LCD2之間,使LCD1的虛擬圖像LCD1’與LCD2平行,相機與LCD2以一定角度捕捉被測鏡面反射的變形條紋。.此外,利用參考文獻獲得了DPMD系統(tǒng)的幾何參數(shù),需要平行于兩個屏幕進行調(diào)整。Δd和d分別表示LCD1’與LCD2之間的距離,以及LCD1’與參考平面之間的距離。兩條光線被顯示并通過測量表面和參考反射到CCD相機。兩個入射光線的絕對相位在參考平面上表示為 φr1(或 φr10)和 φr2,以及 φm1(或 φm10)和 φm2 在被測表面上。入射射線與參考法向量的角以及入射射線與測量表面法向量的角分別為θ和θtφ。h是被測量的鏡面表面相對于參考平面的高度。硬件系統(tǒng)如圖所示。4(b) 使用圖中開發(fā)的DPMD系統(tǒng)測量了具有多個鏡面表面的詹姆斯·韋伯太空望遠鏡的MIRI光譜儀光學(xué)。4(c),測量到的鏡面物體的深度如圖所示。4(d).測量的鏡面表面的深度數(shù)據(jù)可以根據(jù)公式得到。具有校準(zhǔn)幾何參數(shù)(Δd和d)和已知相位值(φm1、φm2、φr1和φr2)的(1):  由于深度可以直接通過絕對相位,而無需梯度積分重建,因此該方法可以利用開發(fā)的DPMD系統(tǒng)成功準(zhǔn)確地測量具有孤立和/或不連續(xù)表面的鏡面物體。
由于深度可以直接通過絕對相位,而無需梯度積分重建,因此該方法可以利用開發(fā)的DPMD系統(tǒng)成功準(zhǔn)確地測量具有孤立和/或不連續(xù)表面的鏡面物體。
3.2 紅外相位測量測偏光度法
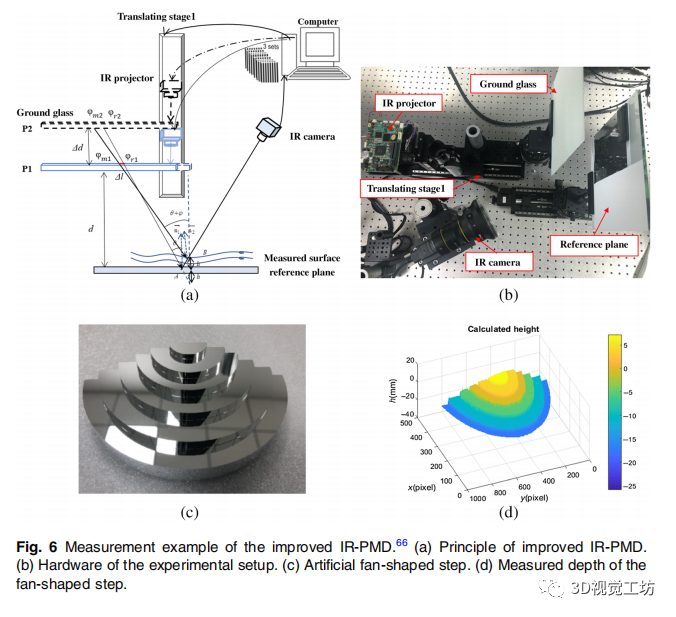 現(xiàn)有的PMD方法大多利用液晶顯示屏作為結(jié)構(gòu)化光源。但由于可見光對環(huán)境光很敏感,因此,光源的選擇是保證PMD系統(tǒng)測量精度的關(guān)鍵因素。因此,利用液晶屏照明重建的三維形狀數(shù)據(jù)在實際測量中影響較大。為了減少環(huán)境光對鏡面表面重建精度的影響,Chang等人66提出了一種建立絕對相位的方法,通過深度數(shù)據(jù)之間的直接關(guān)系來測量不連續(xù)的鏡面分量,如圖所示5.與 DPMD 類似,IR-PMD 致力于從獲得的相位數(shù)據(jù)重建高度,而不僅僅是 積分坡度。該系統(tǒng)采用紅外投影儀作為光源,以減少環(huán)境光的影響。在IR-PMD系統(tǒng)中,將紅外正弦條紋圖案投影到磨玻璃上的投影儀視為紅外數(shù)字屏幕,將具有測量鏡面的紅外攝像機通過平移臺同時移動到兩個位置,實現(xiàn)兩個屏幕設(shè)計。此外,本文還提出了一種利用條紋投影和條紋反射技術(shù)提出的新的幾何校準(zhǔn)方法。圖5(a)為IR-PMD系統(tǒng)的示意圖,選擇一個平行于磨玻璃的鏡作為參考。就像DPMD一樣,我們也需要推導(dǎo)出一個數(shù)學(xué)模型來直接將相位與深度聯(lián)系起來。在地面玻璃上顯示了具有最佳條紋數(shù)的正弦條紋圖案,這可以看作是一個紅外數(shù)字屏幕。紅外照相機從紅外數(shù)字屏幕的兩個位置通過測量的鏡面表面捕捉這些變形的條紋圖案。采用標(biāo)準(zhǔn)的四步相移位算法和最優(yōu)三條紋數(shù)選擇方法分別計算包裹相位數(shù)據(jù)和絕對相位數(shù)據(jù)。根據(jù)情商。(1),三維形狀數(shù)據(jù)可以直接計算,通過從兩個位置捕獲的變形模式計算出的展開相位數(shù)據(jù)。圖5(b)顯示了實驗裝置的硬件情況。紅線框表示設(shè)備的部分放大,橙色虛線圈表示表面部分噴涂的鏡子。利用所提出的IR-PMD系統(tǒng),作者成功地測量了圖中所示的兩個分離的鏡面物體的三維形狀。5(c)和5個(d)。實驗結(jié)果驗證了該方法的有效性和準(zhǔn)確性。 然而,上述IR-PMD方法需要在實驗測量過程中移動被測對象,這會導(dǎo)致隨機誤差。為了避免被測物體運動過程中出現(xiàn)的系統(tǒng)誤差,提出了一種新的改進的IR-PMD三維形狀測量方法,如圖所示 6.這種方法利用紅外數(shù)字顯示器的運動來代替照相機和被測量對象的運動67。 圖6(a)和圖6(b)分別為改進后的IR-PMD系統(tǒng)的原理圖和硬件組成。一個較小的紅外投影儀將正弦條紋圖案投射到一個研磨玻璃上,這被認為是一個紅外數(shù)字屏幕。在測量過程中,通過精確平移臺將磨玻璃和投影儀移動到兩個不同的位置,實現(xiàn)兩屏的設(shè)計。從重建的人工扇形臺階的三維形狀來看,如圖所示。6(c)和6(d),它清楚地表明,所提出的基于IR-PMD的方法可以測量具有孤立和/或不連續(xù)表面的鏡面物體。通過對人工扇形鏡像步長的實驗,驗證了該方法的有效性和準(zhǔn)確性。為了測試該系統(tǒng)的可重復(fù)性,我們通過評估人工步長1和步驟2的高度值變化,研究了改進的IR-PMD67方法的測量不確定度,如圖所示。7.圖7(a)為人工步長的測量深度。圖7(b)為1步面與2步面之間距離的擬合結(jié)果。圖7(c)和圖7(d)是不同處的一個像素的高度值。可以看出,步高變化的最大值分別為0.013和0.015mm,所選像素的標(biāo)準(zhǔn)差值分別為0.0038和0.004mm。這些結(jié)果驗證了本文改進的IR-PMD69方法具有良好的測量重復(fù)性。 通過利用紅外作為光源,該方法不僅可以有效地減少環(huán)境光對測量系統(tǒng)的影響,并測量具有孤立和/或不連續(xù)表面的物體,而且還可以減少在測量過程中由于移動被測量物體和參考而引起的隨機誤差。
現(xiàn)有的PMD方法大多利用液晶顯示屏作為結(jié)構(gòu)化光源。但由于可見光對環(huán)境光很敏感,因此,光源的選擇是保證PMD系統(tǒng)測量精度的關(guān)鍵因素。因此,利用液晶屏照明重建的三維形狀數(shù)據(jù)在實際測量中影響較大。為了減少環(huán)境光對鏡面表面重建精度的影響,Chang等人66提出了一種建立絕對相位的方法,通過深度數(shù)據(jù)之間的直接關(guān)系來測量不連續(xù)的鏡面分量,如圖所示5.與 DPMD 類似,IR-PMD 致力于從獲得的相位數(shù)據(jù)重建高度,而不僅僅是 積分坡度。該系統(tǒng)采用紅外投影儀作為光源,以減少環(huán)境光的影響。在IR-PMD系統(tǒng)中,將紅外正弦條紋圖案投影到磨玻璃上的投影儀視為紅外數(shù)字屏幕,將具有測量鏡面的紅外攝像機通過平移臺同時移動到兩個位置,實現(xiàn)兩個屏幕設(shè)計。此外,本文還提出了一種利用條紋投影和條紋反射技術(shù)提出的新的幾何校準(zhǔn)方法。圖5(a)為IR-PMD系統(tǒng)的示意圖,選擇一個平行于磨玻璃的鏡作為參考。就像DPMD一樣,我們也需要推導(dǎo)出一個數(shù)學(xué)模型來直接將相位與深度聯(lián)系起來。在地面玻璃上顯示了具有最佳條紋數(shù)的正弦條紋圖案,這可以看作是一個紅外數(shù)字屏幕。紅外照相機從紅外數(shù)字屏幕的兩個位置通過測量的鏡面表面捕捉這些變形的條紋圖案。采用標(biāo)準(zhǔn)的四步相移位算法和最優(yōu)三條紋數(shù)選擇方法分別計算包裹相位數(shù)據(jù)和絕對相位數(shù)據(jù)。根據(jù)情商。(1),三維形狀數(shù)據(jù)可以直接計算,通過從兩個位置捕獲的變形模式計算出的展開相位數(shù)據(jù)。圖5(b)顯示了實驗裝置的硬件情況。紅線框表示設(shè)備的部分放大,橙色虛線圈表示表面部分噴涂的鏡子。利用所提出的IR-PMD系統(tǒng),作者成功地測量了圖中所示的兩個分離的鏡面物體的三維形狀。5(c)和5個(d)。實驗結(jié)果驗證了該方法的有效性和準(zhǔn)確性。 然而,上述IR-PMD方法需要在實驗測量過程中移動被測對象,這會導(dǎo)致隨機誤差。為了避免被測物體運動過程中出現(xiàn)的系統(tǒng)誤差,提出了一種新的改進的IR-PMD三維形狀測量方法,如圖所示 6.這種方法利用紅外數(shù)字顯示器的運動來代替照相機和被測量對象的運動67。 圖6(a)和圖6(b)分別為改進后的IR-PMD系統(tǒng)的原理圖和硬件組成。一個較小的紅外投影儀將正弦條紋圖案投射到一個研磨玻璃上,這被認為是一個紅外數(shù)字屏幕。在測量過程中,通過精確平移臺將磨玻璃和投影儀移動到兩個不同的位置,實現(xiàn)兩屏的設(shè)計。從重建的人工扇形臺階的三維形狀來看,如圖所示。6(c)和6(d),它清楚地表明,所提出的基于IR-PMD的方法可以測量具有孤立和/或不連續(xù)表面的鏡面物體。通過對人工扇形鏡像步長的實驗,驗證了該方法的有效性和準(zhǔn)確性。為了測試該系統(tǒng)的可重復(fù)性,我們通過評估人工步長1和步驟2的高度值變化,研究了改進的IR-PMD67方法的測量不確定度,如圖所示。7.圖7(a)為人工步長的測量深度。圖7(b)為1步面與2步面之間距離的擬合結(jié)果。圖7(c)和圖7(d)是不同處的一個像素的高度值。可以看出,步高變化的最大值分別為0.013和0.015mm,所選像素的標(biāo)準(zhǔn)差值分別為0.0038和0.004mm。這些結(jié)果驗證了本文改進的IR-PMD69方法具有良好的測量重復(fù)性。 通過利用紅外作為光源,該方法不僅可以有效地減少環(huán)境光對測量系統(tǒng)的影響,并測量具有孤立和/或不連續(xù)表面的物體,而且還可以減少在測量過程中由于移動被測量物體和參考而引起的隨機誤差。 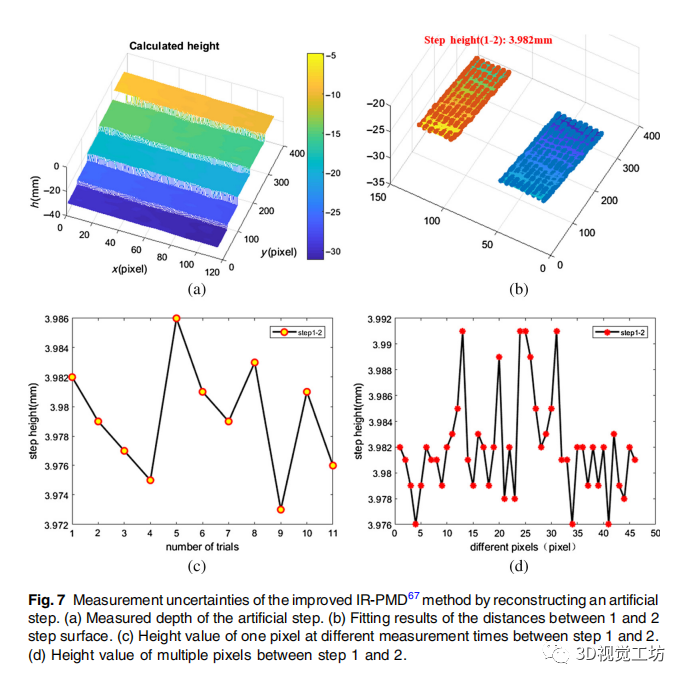
3.3 不連續(xù)反射表面
在工業(yè)領(lǐng)域、航空航天和現(xiàn)實生活中,一些不連續(xù)的部件在同一物體上同時具有擴散表面和鏡面表面。如何重建這些不連續(xù)的擴散/鏡面反射表面的三維形狀是一個具有挑戰(zhàn)性的問題。為了克服這個問題,劉等人68提出了一種通過FPP和DPMD結(jié)合測量這種孤立和/或不連續(xù)表面物體三維形狀的方法,如圖所示。8.與DPMD方法相比,該方法在測量系統(tǒng)中增加了一個投影儀,并利用擴散/鏡面參考平面建立了幾何關(guān)系。與DPMD類似,該方法通過建立一個數(shù)學(xué)模型,同時重建高度和相位,而不是積分坡度。然后,經(jīng)過幾何參數(shù)Δd、d、aieu;vT校準(zhǔn)后,將根據(jù)捕獲的變形條紋計算被測擴散/鏡面反射面的絕對相位數(shù)據(jù)。最后,可以根據(jù)公式計算出不連續(xù)測量物體的高度信息(2):  其中,其中ψ為變形圖案的絕對相位,φ為校準(zhǔn)板處于參考位置時獲得的參考相位。 投影儀和液晶屏幕通過紅、綠、藍通道同時投射和顯示條紋圖案。圖8(a)顯示了所提方法的數(shù)學(xué)模型。硬件系統(tǒng)如圖所示。8(b).
其中,其中ψ為變形圖案的絕對相位,φ為校準(zhǔn)板處于參考位置時獲得的參考相位。 投影儀和液晶屏幕通過紅、綠、藍通道同時投射和顯示條紋圖案。圖8(a)顯示了所提方法的數(shù)學(xué)模型。硬件系統(tǒng)如圖所示。8(b). 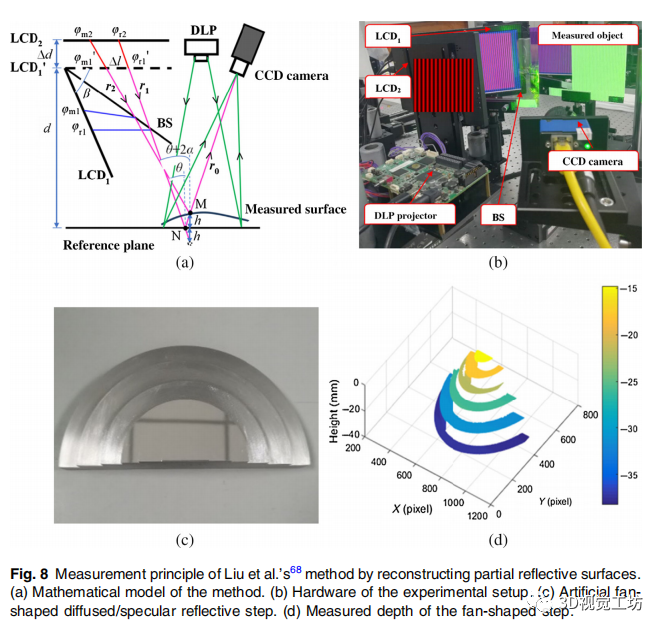 我們選擇了擴散/鏡面表面作為參考。采用該方法測量了一個人工扇形的擴散/鏡面反射步長,如圖所示。8(c).圖8(d)為人工扇形擴散/鏡面反射步驟的三維形狀。為了驗證該系統(tǒng)的測量精度,我們計算了擴散/鏡面反射臺階的相鄰階躍面之間的距離,如表1所示。最大絕對誤差為0.041mm。這些結(jié)果表明,該方法能夠有效、準(zhǔn)確地測量具有擴散/鏡面反射面的不連續(xù)物體。
我們選擇了擴散/鏡面表面作為參考。采用該方法測量了一個人工扇形的擴散/鏡面反射步長,如圖所示。8(c).圖8(d)為人工扇形擴散/鏡面反射步驟的三維形狀。為了驗證該系統(tǒng)的測量精度,我們計算了擴散/鏡面反射臺階的相鄰階躍面之間的距離,如表1所示。最大絕對誤差為0.041mm。這些結(jié)果表明,該方法能夠有效、準(zhǔn)確地測量具有擴散/鏡面反射面的不連續(xù)物體。 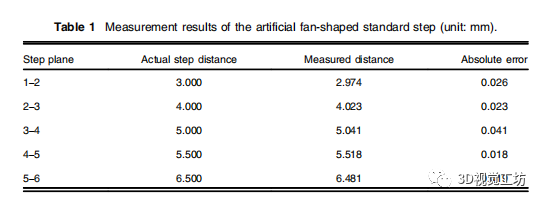
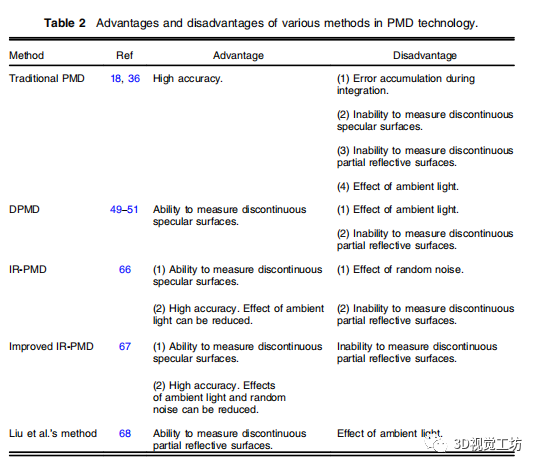 綜上所述,上述所有方法都有其優(yōu)缺點,如表2所示。PMD技術(shù)的進步使得高精度測量具有不連續(xù)和/或孤立表面的鏡面組件成為可能。IR-PMD是一種優(yōu)越的技術(shù),它引入紅外光作為光源來減少環(huán)境光的影響。此外,Liu等人還提出了一個重大進展。該方法可以用來有效而準(zhǔn)確地測量具有不連續(xù)表面的部分反射物體。
綜上所述,上述所有方法都有其優(yōu)缺點,如表2所示。PMD技術(shù)的進步使得高精度測量具有不連續(xù)和/或孤立表面的鏡面組件成為可能。IR-PMD是一種優(yōu)越的技術(shù),它引入紅外光作為光源來減少環(huán)境光的影響。此外,Liu等人還提出了一個重大進展。該方法可以用來有效而準(zhǔn)確地測量具有不連續(xù)表面的部分反射物體。
4 誤差源分析
要準(zhǔn)確獲取鏡面的 3D 形狀數(shù)據(jù),重要且必要的分析PMD 系統(tǒng)中的誤差源,包括幾何校準(zhǔn)誤差、相位誤差(其中由成像和投影系統(tǒng)、顯示屏、隨機相位誤差和采樣相位誤差),對測量結(jié)果進行評估,并評估 3D 形狀測量系統(tǒng)的性能。
4.1 幾何標(biāo)定誤差
PMD系統(tǒng)是基于幾何光學(xué)原理的,因此在測量前必須準(zhǔn)確地獲得系統(tǒng)中各部件的相對位置。因此,幾何校準(zhǔn)是并且將永遠是確定被測量的鏡面表面的相位和深度(或斜率)之間關(guān)系的關(guān)鍵程序。傳統(tǒng)的方法利用校準(zhǔn)工具實現(xiàn)了校準(zhǔn)過程,69、70,但在附加的校準(zhǔn)工具中可能存在誤差。為了克服這一缺點,我們研究了利用顯示屏來校準(zhǔn)PMD系統(tǒng)的自校準(zhǔn)方法。71然而,在成像系統(tǒng)中使用了一個針孔相機模型,這遠不是一個真正的相機模型。因此,該系統(tǒng)的精確幾何校準(zhǔn)仍然是PMD系統(tǒng)面臨的一個挑戰(zhàn)。
4.2 相位誤差
PMD的測量原理是基于相位計算的。因此,相位誤差是PMD系統(tǒng)的一個重要誤差源。相位誤差源主要來自于非線性響應(yīng)、成像和投影系統(tǒng)的透鏡失真、隨機誤差和采樣誤差等原因。由于斜率和深度數(shù)據(jù)是由相位信息計算出來的,因此計算過程受到PMD系統(tǒng)中相位誤差的影響。因此,有必要分析相位誤差的來源,減少相位誤差的影響。
4.2.1 顯示和成像組件的非線性響應(yīng)和鏡頭畸變
由于顯示器和成像組件的伽馬效應(yīng),系統(tǒng)的光強具有非線性響應(yīng),使正弦條紋圖案的標(biāo)準(zhǔn)形狀變成非正弦形狀,從而導(dǎo)致相位誤差。此外,PMD系統(tǒng)的性能也受到鏡頭失真的影響。消除顯示器和成像部件的非線性響應(yīng)和透鏡失真所帶來的誤差是至關(guān)重要的。人們已經(jīng)提出了許多方法來補償非線性響應(yīng)。為了糾正透鏡畸變,Guo等人。74提出了一種校準(zhǔn)測量系統(tǒng)的前補償和后補償方法。楊等人。75提出了一種投影儀校準(zhǔn)方法,它可以用直接測量的失真圖來完全表示透鏡的失真,而不是在現(xiàn)有的方法中使用近似模型。基于軟件的技術(shù)已被用來補償非線性響應(yīng)和透鏡失真。73通過使用軟件生成一個正弦條紋圖案來修正非線性響應(yīng)和透鏡失真。
4.2.2 顯示和成像組件的非線性響應(yīng)和鏡頭畸變
由于液晶屏幕是大多數(shù)PMD系統(tǒng)的必要組成部分,屏幕的不完善性能也會影響測量精度。影響三維形狀測量結(jié)果的誤差源主要包括:顯示表面的平整度變化、透明層中的折射效應(yīng)、灰度和顏色特征問題76。大多數(shù)研究人員認為液晶屏幕是相位計算的理想平面在PMD系統(tǒng)。然而,在實際情況下,所制造的屏幕并不是扁平的。由于屏幕的性能不完善,屏幕上顯示的條紋圖案會發(fā)生變形,從而影響到PMD的測量精度。因此,為了實現(xiàn)更精確的測量系統(tǒng),需要確定液晶屏幕的實際表面幾何形狀。此外,液晶屏透明層的折射效應(yīng)是造成系統(tǒng)測量誤差的主要因素。為了提高條紋投影系統(tǒng)的校準(zhǔn)精度,Chen等人。77提出了一種使用液晶顯示器作為校準(zhǔn)板的相機校準(zhǔn)方法。該方法考慮并修正了液晶屏玻璃板引入的相位誤差。液晶顯示屏的折射誤差模型也適用于PMD系統(tǒng)。李彥等人。41提出了一種相位測量偏度測量,并結(jié)合折射模型來測量鏡子表面。由于通過引入折射模型可以精確地確定光的傳播路徑,因此可以提高系統(tǒng)的測量精度。
4.2.3 顯示和成像組件的非線性響應(yīng)和鏡頭畸變
由于可見光對環(huán)境光很敏感,所以在實際測量中,PMD系統(tǒng)重建的三維形狀會受到外部環(huán)境的影響。此外,測量精度的隨機誤差和采樣相位誤差是導(dǎo)致測量精度的一個重要因素。由于連續(xù)的正弦條紋圖案是由屏幕的像素采樣的,隨機和采樣誤差引入了明顯的相位誤差。為了獲得更準(zhǔn)確的鏡面面三維形狀,需要在未來的研究中研究隨機和采樣相位誤差的補償方法。
5 挑戰(zhàn)和進一步的發(fā)展
雖然基于全場條紋反射的鏡面物體測量方法已經(jīng)進行了大量的研究,但PMD仍存在一些不足,需要更魯棒和靈活的解決方案。
5.1 具有大曲率的復(fù)雜曲面
一些鏡面分量具有較大的曲率變化面。利用現(xiàn)有的PMD系統(tǒng),高精度地測量這類物體的三維形狀是一個具有挑戰(zhàn)性的問題。影響大曲率測量精度的因素如下:(1)通過測量的大曲率變化面的反射射線可能超過顯示屏的物理范圍;(2)大曲率可能模糊反射條紋圖案,增加相位誤差。很少有人致力于重建大曲率鏡面曲面的三維數(shù)據(jù)。渴望的等人。78提出了一種利用圓錐鏡測量圓柱面圓度的方法,使圓柱面可以轉(zhuǎn)移到平面圖像中。為了進一步測量具有高曲率的鏡面表面,可以在PMD系統(tǒng)中引入曲面屏。
5.2 高精度
正如在Sec. 4中提到的。、影響現(xiàn)有PMD系統(tǒng)精度的因素有很多。為了進一步提高PMD系統(tǒng)的測量精度,有必要對不同誤差源所引入的誤差進行補償。
5.3 快速測量
在實際生產(chǎn)中,有大量的鏡面物體需要在實時采集和分析,這對光學(xué)測量方法提出了快速要求。快速測量通常被認為是提高硬件效率和減少拍攝模式。Trumper 等人 79 同時將三組正交正弦條紋圖案編碼到紅色、綠色和藍色通道中,將采集時間減少到三分之一,可用于測量動態(tài)物體。但是,這種方法會出現(xiàn)在彩色條紋圖案中,例如顏色通道之間的串?dāng)_和色差。
5.4 便攜式
現(xiàn)有的PMD系統(tǒng)有缺點,在各種環(huán)境下組裝、攜帶和安裝。因此,小型化和可移植性是PMD系統(tǒng)的兩個重要發(fā)展趨勢。將PMD系統(tǒng)嵌入到制造系統(tǒng)中以提高測量精度是一個很好的選擇。Butel等人80建立了一個基于移動設(shè)備的便攜式PMD系統(tǒng),它可以在任何移動設(shè)備上運行,并在1min內(nèi)快速完成3D形狀測量。馬爾多納多等人。81開發(fā)了一種新型的便攜式坡度測量便攜式光學(xué)測試系統(tǒng),可以獲得更好的表面精度和坡度精度。
6 總結(jié)
本文綜述了PMD在獲得鏡面三維形狀方面的最新進展。主要介紹了PMD系統(tǒng)的測量原理、PMD的進展、誤差源分析、挑戰(zhàn)和進一步的發(fā)展。雖然PMD技術(shù)的某些方面已經(jīng)被研究用來測量不連續(xù)和/或鏡面表面,但在準(zhǔn)確和快速地測量其三維形狀方面仍有許多未解決的挑戰(zhàn)。因此,仍然需要進一步的研究,以使PMD技術(shù)更靈活地校準(zhǔn),更便于使用,更準(zhǔn)確,更快的實際測量工業(yè)制造和航空航天應(yīng)用。 —END—
-
軟件
+關(guān)注
關(guān)注
69文章
5063瀏覽量
88446 -
移動設(shè)備
+關(guān)注
關(guān)注
0文章
509瀏覽量
54921 -
PMD
+關(guān)注
關(guān)注
1文章
13瀏覽量
9217
原文標(biāo)題:綜述 I 用于獲取鏡面 3D 形狀的相位測量偏轉(zhuǎn)法:對最新技術(shù)的回顧
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
中國龍芯CPU及產(chǎn)品最新進展
風(fēng)光互補技術(shù)及應(yīng)用新進展
風(fēng)光互補技術(shù)原理及最新進展
DIY懷表設(shè)計正式啟動,請關(guān)注最新進展。
電子封裝技術(shù)最新進展
發(fā)燒友直播預(yù)告:車聯(lián)網(wǎng)技術(shù)的最新進展
車聯(lián)網(wǎng)技術(shù)的最新進展
VisionFive 2 AOSP最新進展即將發(fā)布!
OpenHarmony的最新進展和實踐成果
ASML***的最新進展





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論