 所有行業的DAQ:為雙極性輸入增加增益
所有行業的DAQ:為雙極性輸入增加增益
在今天的文章中,我們將介紹一種可用于將ADAQ798x連接到雙極性傳感器和輸入源的配置。這些類型的信號在工業和數據采集應用中很常見。此配置基于我們之前討論的同相配置,用于將雙極性信號轉換為單極性信號,用于集成ADC。
同相求和配置
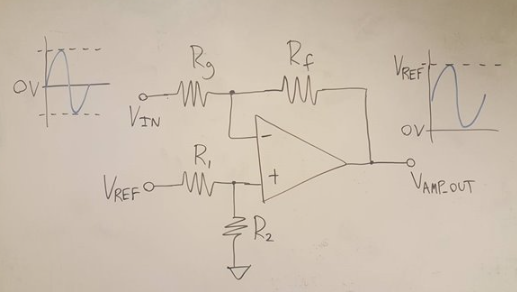
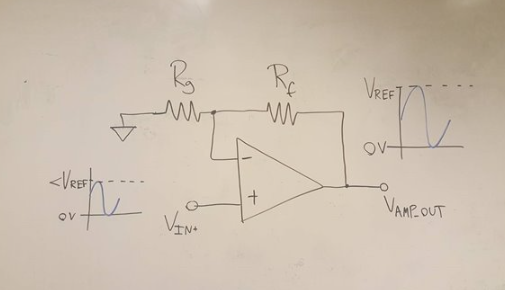
雙極性信號在地上和地以下擺動(0 V)。由于ADAQ798x的集成ADC只能轉換0 V和V之間的信號裁判,雙極性信號需要針對ADC進行直流偏置和適當縮放。以下配置通過添加兩個電阻(R1和 R2) 到標準同相配置。
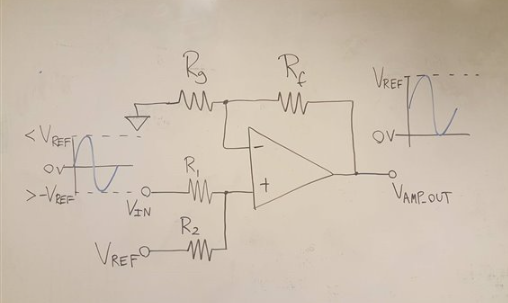
此配置通過將輸入信號與單獨的直流電壓相加,將ADC驅動器的輸出偏置至ADC的中間電平輸入(V裁判/2).使用參考源 (V裁判),因為直流電壓通常很實用,因為它無需額外的電路(無論如何,ADAQ798x始終配有基準電壓源!它還可以防止 V 偏差裁判增加系統失調誤差,因為ADC驅動器的直流偏置始終是V的一半裁判.出于這些原因,我們將使用 V 專門研究此配置裁判作為直流“移位”電壓。
此配置的傳遞函數為:

與常規同相配置類似,比率Rf和 Rg決定從IN+到AMP_OUT的增益,但該比率現在取決于v的輸入幅度在也。請注意,v在是雙極性的,但同相節點上的電壓是單極性的。這意味著對于 v 的最小值在,IN+ 上的電壓必須為 0 V:
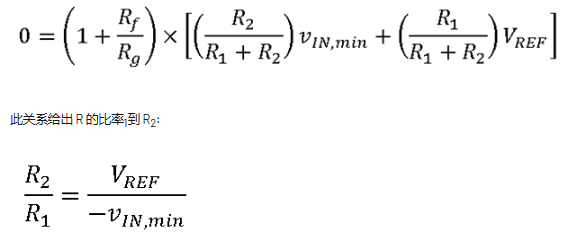
Rf 和 Rg 可以使用配置的傳遞函數確定,并且當 vIN 為 0 V 時,ADC 驅動器 (vAMP_OUT) 的輸出等于 VREF/2 的條件。 求解 Rf 和 Rg 的方程可得到:
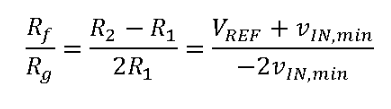
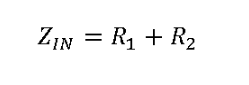
我們現在有 R 的比率1到 R2和 Rf到 Rg,但我們仍然需要選擇特定的值。我們解決了選擇 R 的問題f和 Rg我們上一篇文章中的值。R1和 R2應根據應用的噪聲、精度和輸入阻抗要求來確定選擇。小電阻將改善噪聲,并可以減少其與ADC驅動器輸入偏置電流相互作用引起的失調誤差(參見MT-038和CN-0393),但需要大電阻來增加輸入阻抗并降低基準電壓源的輸出電流。該電路的輸入阻抗為:
注意,對于具體情況下,幅度為 v在是 ±V裁判,R的比率f到 Rg為 0。在這種情況下,ADC驅動器增益為1,這意味著Rg省略和 Rf可以是 0 Ω。
讓我們看一個示例,其中ADAQ7980需要對±1 V輸入信號進行雙極性至單極性轉換,電壓為VREF= 5 V 并使用 Rf= 2 kΩ。使用上述等式,R2必須是 R 的 5 倍1和 Rf必須是 R 的 2 倍g.由于 Rf為 2 kΩ, Rg必須為 1 kΩ。R 的特定值1和 R2可根據應用要求進行選擇。對于此示例,我們將選擇R1和 R2這抵消了輸入偏置電流對失調誤差的影響。MT-038 解釋 R1||R2應等于 Rf||Rg來實現這一點,這給了 R1= 800 Ω 和 R2= 4 kΩ。
但讓我們也考慮一個例子,其中vIN = ±10 V和with VREF = 5 V。在這種情況下,我們遇到了一個問題,其中 R 的比率f和 Rg是一個負數,因此我們實際上無法通過此配置實現此輸入范圍。事實上,最大的v在與此配置一起使用的是 ±V裁判,其中ADC驅動器增益等于1。幸運的是,我們將研究另外兩種配置,它們將允許我們在將來的本系列條目中超越此輸入范圍!
結語
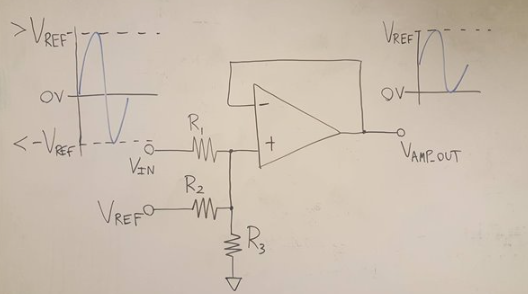
上述配置也可以通過連接R用于單極性信號2接地而不是VREF.這種修改對于需要為ADC衰減的單極性輸入信號非常有用(幅度為>V裁判).在這種情況下,ADC驅動器很可能處于單位增益,因此Rf 和Rg不是必需的。
如上所述,如果應用需要高輸入阻抗,則R1和 R2必須很大,這會增加系統的本底噪聲。我們可以通過增加一個并聯電容和/或通過過采樣和抽取來補償增加的噪聲。這兩種選擇都犧牲了輸入信號帶寬以降低本底噪聲。然而,對于低帶寬或直流應用,輸入帶寬并不那么重要。因此,這些配置更適合低帶寬、高輸入阻抗應用。我們將在下一篇文章中更詳細地討論這一點。
然而,這沒有解決的一個問題是ADC驅動器的輸入偏置電流流過電阻引起的失調誤差。大電阻導致較大的直流誤差。通過調整R的比率,可以以犧牲某些輸入范圍為代價來減小該誤差1和 R2以補償不需要的壓降,或通過選擇 Rf和 Rg抵消由 R 引起的偏移的值1和 R2.但是,請記住,Rf必須足夠小以確保放大器的穩定性,因此第二種選擇并不總是可行的。
審核編輯:郭婷
-
驅動器
+關注
關注
53文章
8256瀏覽量
146564 -
adc
+關注
關注
98文章
6509瀏覽量
544958 -
電壓源
+關注
關注
1文章
410瀏覽量
32863
發布評論請先 登錄
相關推薦
全能DAQ ADAQ798x雙極性輸入的另一種配置
全能DAQ ADAQ798x增加單極性輸入的增益配置
全能DAQ ADAQ798x實現衰減雙極性輸入的ADC驅動器配置
全能DAQ ADAQ798x如何增加雙極性輸入的增益
一種可用來將ADAQ798x與雙極性傳感器和輸入源接口的配置
ADAQ798x如何增加單極性輸入的增益
ADC驅動器配置方案:如何增加單極性輸入的增益資料下載

雙極性ADC和差分ADC中的失調誤差和增益誤差
陷波濾波器可降低放大器峰值并增加增益平坦度
所有行業的數據采集:雙極性輸入的另一種配置
所有行業的數據采集:衰減雙極性輸入
所有行業的數據采集:增加單極性輸入的增益





 工商網監
工商網監
評論