 自動駕駛仿真驗證——天氣因素對傳感器探測模型的影響與建模
自動駕駛仿真驗證——天氣因素對傳感器探測模型的影響與建模
01
前言
SAIMO
自動駕駛汽車和自動駕駛系統是當今汽車領域最前沿的技術。自從汽車誕生以來,沒有一種技術能以如此革命性的方式改變汽車行業。自動駕駛汽車致力于自動化的安全駕駛,并為行動不便的人們增加了使用交通工具的機會。自動駕駛汽車正在從根本上改變人和貨物的運輸方式,有望顯著地造福未來社會。
然而,由于自動駕駛技術還未完善,為了確保安全和驗證場景,難以讓自動駕駛汽車廣泛地進行實車驗證。目前,一套行之有效的方法是利用仿真系統驗證自動駕駛算法。這套方案已經得到行業認可,并涌現出大量仿真理論及應用軟件,可以在安全性和成本等方面發揮重要作用。
自動駕駛算法由感知、決策和車輛控制等模塊構成。在仿真環境中,還原真實車輛的雷達感知系統尤為重要,因為車輛后續的決策算法都需要基于感知系統的輸出數據。賽目科技針對自動駕駛仿真中的雷達感知系統在不同天氣環境下的表現,展開研究與討論。
02
自動駕駛傳感器感知系統仿真
SAIMO
自動駕駛車輛的傳感器組件包括毫米波傳感器、激光傳感器、相機傳感器和超聲波傳感器等多種類型。每種傳感器都有其獨特的功能和特性,因此對它們進行建模和研究具有挑戰性。尤其是在自動駕駛仿真驗證需求日益增加,精度要求也越來越高的情況下,傳統的真值模型已經無法滿足驗證需求。
傳感器內部電子器件的特性、結構和數據采集處理算法等屬于“黑盒”,難以獲取。同時,環境因素對傳感器感知系統的影響無法忽略。例如,毫米波傳感器受到目標電磁散射、地表雜波、環境噪聲和目標截面積(RCS)的影響;激光傳感器受到目標反射率和多次反射的影響;相機傳感器受到光線衍射和環境光等的影響。因此,對于自動駕駛傳感器感知系統仿真,需要考慮這些影響因素。
目前,物理傳感器建模和研究是賽目科技自動駕駛傳感器感知系統仿真中的重點研究方向。物理建模旨在構建足夠還原真實傳感器特性的數學模型,從而提高自動駕駛仿真驗證在感知方面的能力。在物理傳感器模型中,天氣影響是一個極為重要的影響因素,因為天氣對所有傳感器都會產生影響,而且在真實場景中非常普遍。因此,針對不同天氣環境對不同傳感器的影響進行建模對自動駕駛傳感器感知系統仿真具有重大意義。賽目科技致力于還原天氣因素對自動駕駛感知系統的影響,利用數學建模與實測數據結合,針對不同傳感器與不同類型的環境,提出了一套設計方案。
03
天氣因素對傳感器的影響
SAIMO
天氣因素多種多樣,本文主要討論雨雪霧等常規天氣。不同的天氣對不同的傳感器影響也不相同。如霧,對毫米波雷達的影響很小,通常考慮毫米波雷達的功率衰減即可;但對于激光雷達,脈沖波的波長很小,脈沖波會撞擊空氣中的水粒子導致產生雜波(如圖1)。
圖1:激光雷達返回(頂部)場景中的霧。顏色由左邊的激光雷達通道和右邊的強度。地面點已被去除,以更好地看到由霧引入的點[1]。
不同的天氣種類會由于電磁波,脈沖波的碰撞到雨雪霧粒子而產生雜波,導致探測過程中出現雜點,但這種現象是真實存在的,需要在仿真中再現這種效果。同時,由于波具有一定的穿透性,空氣中的雨雪霧粒子也會使得雷達的功率更快地衰減。賽目科技針對傳感器發射功率衰減以及環境反射雜波兩個方面進行構思,并提出一套基于這兩方面影響的環境建模方案。
04
天氣模型
SAIMO
針對毫米波傳感器與激光傳感器,天氣模型影響的是兩個方面,其中一個是對發射功率的衰減,目前已經有很多這方面的研究并且有仿真軟件已經支持這個功能。對于衰減模型,針對不同的天氣與傳感器,可以使用函數
來表示距離R下目標的衰減,其中參數用于標定不同天氣,在不同程度下對不同雷達的影響,其中x表示該天氣的程度大小。該參數對不同規格的雷達也具有敏感性,通常需要通過實測數據標定才能獲取。
對于雜波生成模型,難點在于兩方面:
1)雜波生成的數量;
2)雜波對應的距離,如圖2。
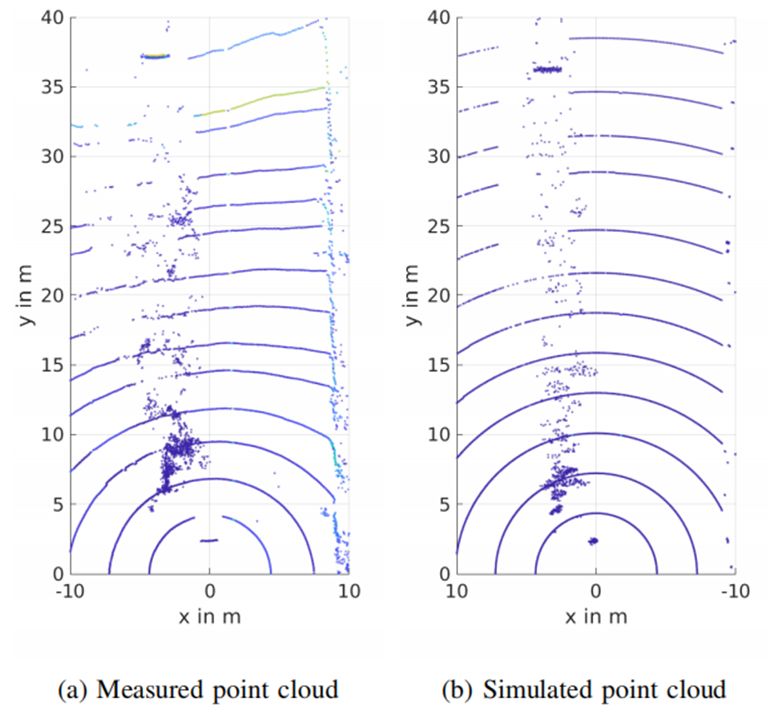
圖2:激光雷達在噴霧的影響下所形成的點云信息,左為真實測量值,右為仿真值,可以觀測到距離越遠,雜點越少[2]。
目前已有方法從仿真環境出發,在環境中生成不同數量的隨機粒子,在利用光追算法進行信號處理時,光線有可能撞擊到環境中的粒子從而生成雜波信號。但是該方案有無法探測粒子后方目標以及對仿真環境需求過大的缺陷。賽目科技致力于傳感器數據的實時仿真,區別于場景生成水粒子這種方法,直接在傳感器運算階段添加雜波來模擬環境因素,該方法擁有更快的運算速度。
生成雜波的數量需要通過路采數據得到,表示不同天氣程度在不同類別傳感器下生成的雜波數量。以對環境比較敏感的激光雷達為例,需要隨機分配到每一個光線射線方向上,對應的第i條射線記為,并記錄其隨機產生的方向信息。
值得注意的是,該雜波生成數量是在接收信號構建中體現,雜波數量不等于最終生成的雜點數量,因為雷達的后處理算法會將一些回波功率底,或者并非最強回波功率的部分排除。
對于雜波對應的距離分布,有一種思路是將空間中的雨雪霧,看作是連續的水粒子,固體粒子的分層。賽目科技認為電磁波在每一層中擁有相同的反射概率,這使得反射信號的層數滿足一個多項式分布。而多項式分布的極限為泊松分布。賽目科技認為,可以是使用一個泊松概率分布來體現雜波出現的距離分布
其中表示不同天氣程度在不同類別傳感器下的泊松分布系數,需要實測數據支撐。第i條射線方向的距離為
就可以在場景中隨機生成一定數量的,距離上滿足泊松分布的雜波,其中射線方向對應的距離與角度信息為。由于雜波也是信號反射的結果,以激光雷達為例,在設置碰撞雨雪霧粒子反射率后,可以計算該雜波的功率
其中分別為激光的發射功率,增益,接受孔徑和光束發散角。不同的雷達對應的回波功率公式都不相同,并且在不同模型中,其他參數也會對回波功率產生影響。這些雜波作為接收信號的一部分進入物理傳感器的處理模塊,功率衰減體現為弱反射物理的輸出能力下降,雜波可能體現為點云或者RD圖中的雜點。
05
結論與探討
SAIMO
鑒于天氣變化大/種類多的特點,自動駕駛仿真中的天氣模型建模仍然存在很大的挑戰。雖然利用概率模型進行建模是一種有效的方法,但是還需要進一步探索其他建模思路。例如,利用大量實測數據的數據庫來提取對應天氣的雜波,以更真實地模擬天氣環境,但這需要有強大的數據支持。另外,在場景中構造粒子并將粒子信息返回的方法可以支持大風天氣對雨雪的干擾,并還原一些擾動信息,但現有的傳感器物理建模中,天氣環境建模仍然是一個巨大的挑戰。因此,需要繼續深入研究和探索更加有效和準確的建模方法,以提高自動駕駛系統在各種復雜天氣環境下的可靠性和安全性。賽目科技將會針對這些技術難點,持續進行產品的開發與迭代。
參考文獻
References
[1]: Martin Hahner, Christos Sakaridis,Dengxin Dai,Luc Van Gool.
Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather.
[2]: Clemens Linnhoff, Dominik Scheuble, Mario Bijelic, Lukas Elster, Philipp Rosenberger, Werner Ritter,Dengxin Dai and Hermann Winner.
Simulating Road Spray Effects in Automotive Lidar Sensor Models
SAIMO
掃描二維碼
關注賽目科技
 ?
?專注智能網聯汽車
測試丨驗證丨評價研究
原文標題:自動駕駛仿真驗證——天氣因素對傳感器探測模型的影響與建模
文章出處:【微信公眾號:賽目科技】歡迎添加關注!文章轉載請注明出處。
-
賽目科技
+關注
關注
0文章
39瀏覽量
650
原文標題:自動駕駛仿真驗證——天氣因素對傳感器探測模型的影響與建模
文章出處:【微信號:gh_c85a8e3c0f2a,微信公眾號:賽目科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
多傳感器融合在自動駕駛中的應用趨勢探究

一文聊聊自動駕駛測試技術的挑戰與創新

基于場景的自動駕駛驗證策略

FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
自動駕駛識別技術有哪些
自動駕駛的傳感器技術介紹
自動駕駛汽車傳感器有哪些
XV7181BB 陀螺儀傳感器在自動駕駛設備中的應用

自動駕駛仿真測試實踐:高精地圖仿真

康謀分享 | 自動駕駛聯合仿真——功能模型接口FMI(一)

揭秘自動駕駛:未來汽車的感官革命,究竟需要哪些超級傳感器?
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
探索自動駕駛傳感器仿真模型的可信度
自動駕駛仿真系統中網絡安全測試方法研究






 工商網監
工商網監
評論