 帶渦輪開關的插槽車控制器電路
帶渦輪開關的插槽車控制器電路
電子愛好者和愛好者通常喜歡拼搭和玩玩具車。如果您是其中之一,這里有一個可以控制老虎機車的電路。“老虎機車”使用軌道上的插槽和汽車下方的銷來幫助引導它們在賽道上行駛。他們通常有兩輛車。這個老虎機汽車控制器電路允許兩個用戶將速度調整到最大,而不會讓汽車在繞彎時飛離賽道。此外,“加速”按鈕允許最大加速和降低直線。
電路圖:
槽車控制器電路工作原理:
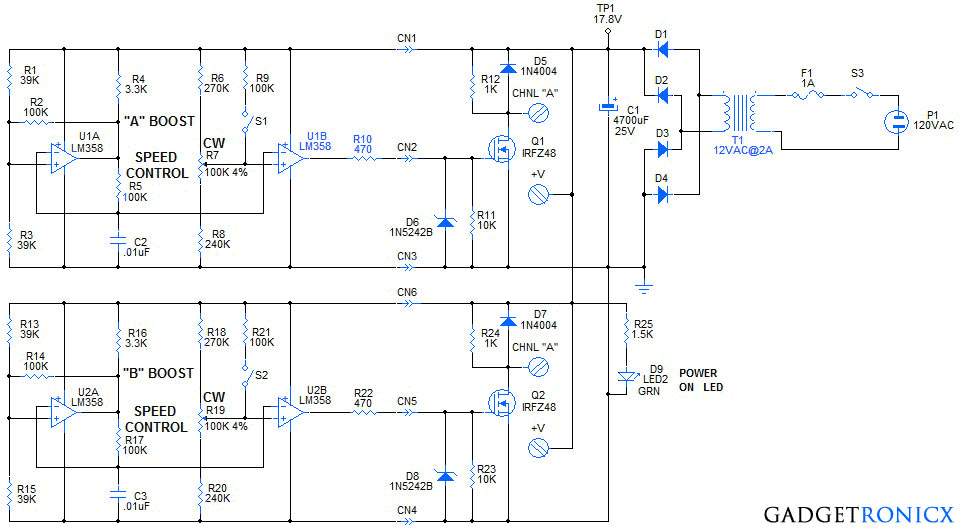
上述賽車速度控制電路由兩個獨立的單元組成。功率單元 - 此部分為整個電路和控制單元提供電源 - 此部分控制電機速度。
動力單元:
功率單元包括:開關S3(開/關),F1保險絲,T112VAC-2A變壓器,D1-4二極管形成橋式整流器和C1濾波帽。Q1、D5、D6,用于通道“A”電機控制。Q2、D7、D8用于通道B電機控制,LEDD9用于指示電源。2 – 3 針接頭 CN1-3、CN4-6
用于連接通道“A”和“B”控制器。我建議使用四根電線(如帶狀電纜)將每個控制器連接到主電源單元。
控制器單元:
出于本討論的目的,請參閱原理圖的通道“A”部分。該電路旨在與9V至30V的任何直流電源配合使用。這就是為什么D6柵極鉗位用于更高的電壓以保護IRFZ48
MOSFET(IRFZ44也是一個不錯的選擇)。R11與D6并聯可確保在控制器未連接時關閉Q1。D5 為感應電機負載的 MOSFET 提供反激保護。
該電路的核心是雙通道運算放大器LM358。U1A、R1、R3 構成振蕩器參考分壓器網絡的 V/2 分壓器,R6、R7、R8 允許占空比與 9V 至30V 的任何直流電源配合使用,并在速度控制電位器 R0 的整個范圍內提供相同的 100% 至 7% 占空比。這里的U1A是一個三角波振蕩器。R2 為 U1A(U1Ain+) 的正輸入提供正反饋。
開關遲滯量由R1//R3和R2的電阻有效決定,當U1A的輸出從低電平切換到高電平時,U1Ain+的輸入切換在U1Ain-的輸入之上。這使得U1A的輸出保持高位。C2
開始通過電阻器 R5充電。當U1Ain-高于U1Ain+時,U1A的輸出變低。U1Ain+被拉到U1Ain以下,這使得U1A的輸出保持低水平。C2開始通過R5放電。當U1Ain-低于u1Ain+時,U1A的輸出再次變高。因此U1A振蕩。
U1Ain-、R5和C2的交匯點以三角形波形上下斜坡上升。U1B將C2、R5結處的電壓與R6、R8和速度控制R7的分壓器網絡提供的參考電壓進行比較。選擇R6和R8的值,使R7上的電壓跨度大于C2,R5交界處三角波的幅度。當結電壓小于基準電壓時,U1B的輸出為高電平,從而開啟Q1。當結電壓大于基準電壓時,U1B的輸出為低電平,從而關閉Q1。在這種情況下,V+螺絲端子將為電機供電,功率 MOSFET 將為每個通道提供 PWM 接地。
隨著基準電壓的變化,U1B的占空比輸出從0%變為100%。電阻 R9 和渦輪開關 S1 為基準提供上拉電壓,使 U1B 輸出為高電平并開啟Q1,從而為 Turbo 升壓提供 100% 的硬通通。
注意:
電阻器 R7 和 R19 為通道 A 和 B 提供速度控制,而開關 S1 和 S2 用于激活渦輪增壓器。
如果軌道將兩個共軌連接在一起,則原理圖中顯示的四個螺釘端子可以減少到三個。因此,我提供了四個,以防每個軌道都有自己的(兩個)螺釘連接器
該電路還被證明對調光或任何其他類型的PWM 0%至100%控制有效。
-
控制器電路
+關注
關注
2文章
27瀏覽量
12317 -
汽車控制器
+關注
關注
0文章
25瀏覽量
5575
發布評論請先 登錄
相關推薦
控制器有兩個SD/MMC插槽的用途是什么?
單元空調加熱和制冷控制器帶多速風機、ON/OFF開關和室內傳

LTC4242: 用于PCI Express 的 雙插槽熱插撥控制器 數據手冊


雙插槽ATCA AdvancedMC?控制器TPS2358數據表
用于并行PCMCIA控制器的雙插槽PC卡電源接口開關TPS2205數據表
串行PCMCIA控制器的雙插槽PC卡電源接口開關TPS2206數據表
什么是開關控制器?有哪些特點?
TPS2359雙插槽ATCA AdvancdMC控制器,帶I2C評估模塊





 工商網監
工商網監
評論