 APM飛控固件的兩種輸出調試信息的方法
APM飛控固件的兩種輸出調試信息的方法
在無人機飛控固件開發過程中,我們經常需要實時輸出一些調試信息(如一些變量的值、狀態機切換提示等),在APM固件中有如下兩種常用的輸出調試信息的方法:
一、使用Mavlink的“STATUS TEXT”幀來發送調試信息
這個Mavlink幀的ID號為253,內部包含了50個字節的定長數據段,也就是說我們使用這個幀最多一次只能輸出50個字節的字符。其調用方法如下:
gcs().send_text(MAV_SEVERITY_CRITICAL, "NFCY test! %.2f", 1.234f);
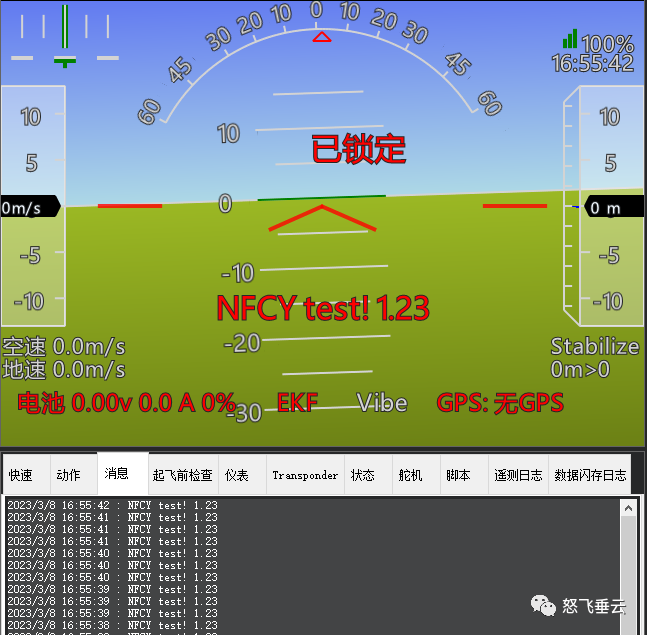
其中第一個參數定義的是要發送的數據的緊急程度,如果定義的是“MAV_SEVERITY_CRITICAL”,則要顯示的信息會同時在MissionPlanner的姿態窗口和消息窗口中顯示。這個函數后面兩個參數的用法與C語言中的printf是一樣的。
最終的顯示效果如下:
二、使用“hal.console->printf”來發送調試信息
相對于第一種方法,這種方法在效率和靈活性上更接近C語言的printf,其輸出直接發送到飛控USB虛擬出的串口上,因此一般直接用串口調試助手查看其輸出。其用法示例如下:
hal.console- >printf("\\n\\n NFCY test! %.2f \\n\\n", 1.234f)
最終的顯示效果如下:
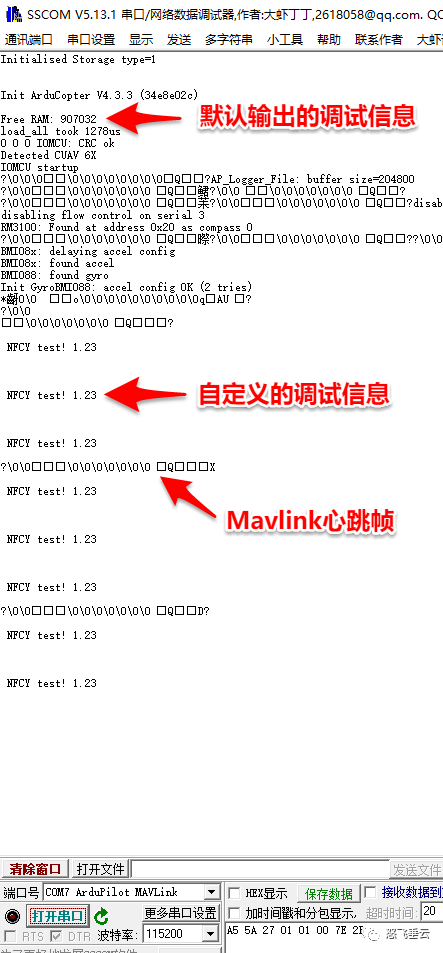
由上圖可知,這種輸出方法更接近平常我們用的單片機串口調試方法,但是由于默認情況下USB接口虛擬出的串口同時也輸出Mavlink幀(至少有1Hz的Mavlink心跳幀),二者混在一起,看起來比較麻煩。不過可以通過關閉Mavlink輸出來解決。
以上就是APM固件的兩種飛控調試信息的輸出方法,希望對大家有所幫助。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
調試
+關注
關注
7文章
578瀏覽量
33924 -
C語言
+關注
關注
180文章
7604瀏覽量
136698 -
狀態機
+關注
關注
2文章
492瀏覽量
27529 -
無人機
+關注
關注
229文章
10420瀏覽量
180150 -
APM
+關注
關注
1文章
71瀏覽量
13008
發布評論請先 登錄
相關推薦
嵌入式開發輸出調試信息的幾種方法
《論語》有云:“工欲善其事,必先利其器”。輸出調試信息是軟件開發中必不可少的調試利器,在出現bug時如果沒有調試信息將會是一件令人頭痛的事。
發表于 07-21 10:28
?922次閱讀

如何利用設置斷點和輸出日志這兩種方法去調試HarmonyOS App呢
,比較常用的有設置斷點和輸出日志兩種方式,本文將詳細介紹這兩種調試App的方式。設置斷點如果認為需要跟蹤的代碼或bug在某行代碼的附近,可以單擊該行代碼前面的部分為該行設置斷點,這時會
發表于 05-24 14:57
嵌入式開發為什么需要輸出調試信息?
嵌入式開發為什么需要輸出調試信息? 因為輸出調試信息是嵌入式開發中一項非常重要的實踐,它有助于保證軟件的可靠性、穩定性和性能,也是故障排查的關鍵工具之一。 嵌入式開發
發表于 11-28 16:46
兩種遠程調試嵌入式系統的介紹
調試嵌入式系統與桌面操作系統差別很大,本文向您介紹調試嵌入式系統的兩種推薦方案,插樁和片上調試,希望對您的嵌入式項目中有所幫助。我們介紹兩種
發表于 04-14 07:43
?2581次閱讀
英創信息技術ARM9主板進行連接調試的兩種方法
在我們提供給用戶的《使用VS2005連接和調試英創ARM9嵌入式模塊》一文中,我們分別以在EM9000上和在EM9260上為例講述了兩種對基于WinCE的ARM9主板進行連接調試的方法
Linux開發中如何同時輸出調試信息到終端及文件
文件中。 比如: 但是有時候既要實時查看打印調試信息,又要把這些調試信息保存下來發給他人分析。 下面分享能達到這個需求的兩種方法: 1、使用
適用于PIX或APM的本地升級固件方法
適用于PIX或APM的本地升級固件方法,首先打開 http://firmware.diydrones.com/ 3DR 的固件服務器。 然后選擇適合自己的
發表于 08-20 16:34
?0次下載





 工商網監
工商網監
評論