 移植RT-Thread nano到CW32L083
移植RT-Thread nano到CW32L083
因為工程的需要用到操作系統,這里可以選擇freeRtos或者RT-Thread。我這里選用了RT-Thread。下面就如何用移植,分享如下:
1、打開一個cw32l083的blink工程。
2、打開manage Run-Time Environment工具,選擇RT-Thread,我們這里只選擇kenel。

3、打開RTOS目錄下的board.c文件,添加main.h頭文件的引用、添加系統心路中斷函數、添加systick初始化。

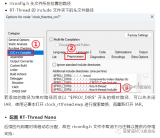
4、打開rtthconfig.h中內存管理的選項:

5、注釋掉interrupts_cw32l083.c中HardFault_Handler、PendSV_Handler兩個函數,避免出現得新定義的錯誤

6、編譯后零錯誤零警告:

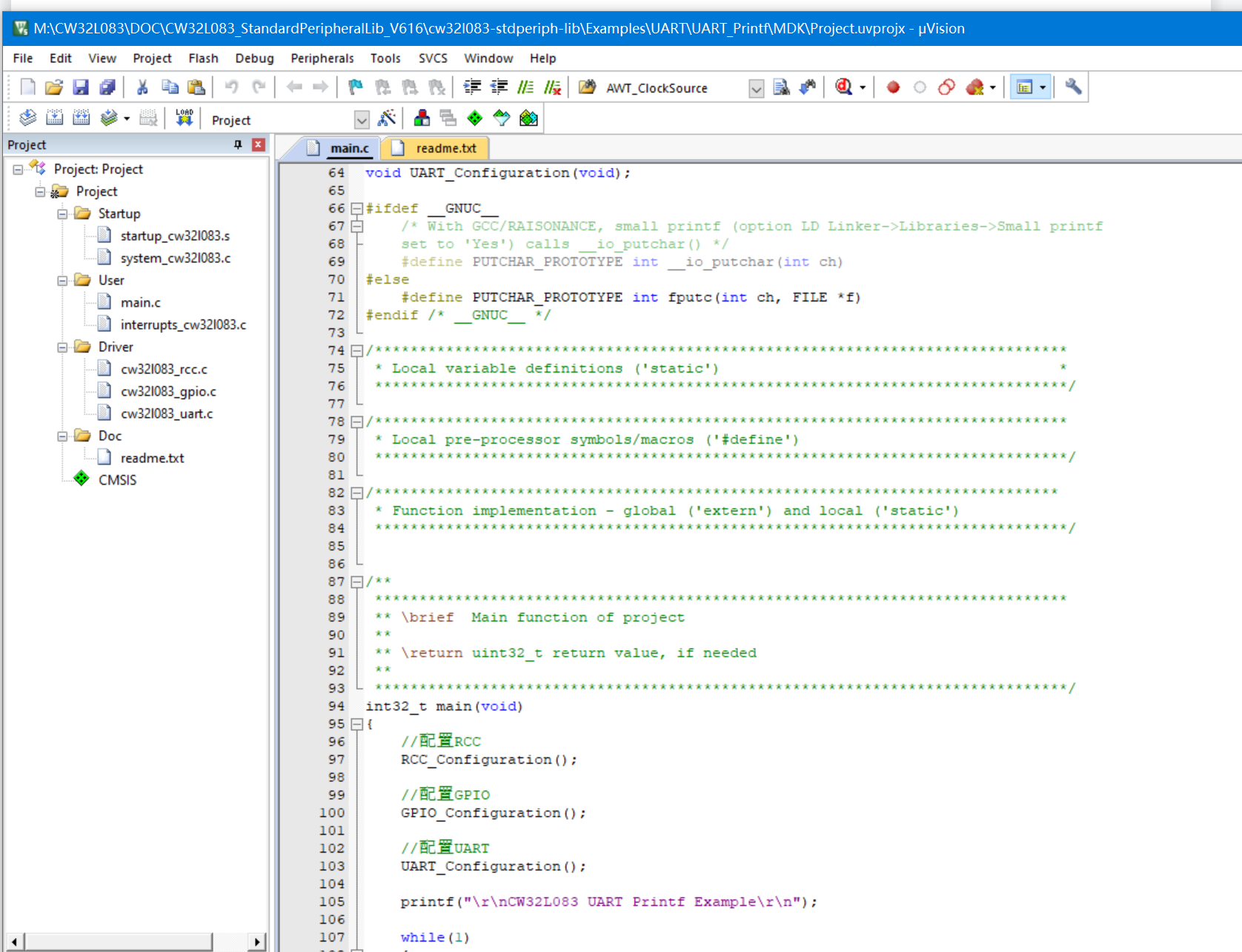
8、在main.c中添加rtthreah.h的頭文件引用,再添回兩個任務函數,并在主程序中啟動:
struct rt_thread thread1;
struct rt_thread thread2;
char thread1_stack[512];
char thread2_stack[512];
void thread1_entry(void*param)
{
while (1)
{
printf("thread1 is runningrn");
rt_thread_mdelay(200);
}
}
void thread2_entry(void*param)
{
while (1)
{
printf("thread2is runningrn");
rt_thread_mdelay(400);
}
}
void thread1_init(void)
{
rt_err_t fd=rt_thread_init(&thread1,"thread1",&thread1_entry,0,&thread1_stack[0],sizeof(thread1_stack),10,10);
if(fd < 0)
{
printf("thread1 init is fail rn");
}
else
{
printf("thread1init is success rn");
}
rt_thread_startup(&thread1);
}
void thread2_init(void)
{
rt_err_t fd=rt_thread_init(&thread2,"thread2",&thread2_entry,0,&thread2_stack[0],sizeof(thread2_stack),10,10);
if(fd < 0)
{
printf("thread2 init is fail rn");
}
else
{
printf("thread2init is success rn");
}
rt_thread_startup(&thread2);
}
int32_t main(void)
{
//配置RCC
RCC_Configuration();
//配置GPIO
GPIO_Configuration();
//配置UART
UART_Configuration();
printf("
CW32L083 UART Printf Example
");
thread1_init();
thread2_init();
while(1)
{
}
}
【實驗效果】
編譯后下載到開發板,打開串口綜端,就可以看到兩個任打印出相應的信息。

【總結】
移植RT-Threadg nano到cw32l083的主要的就是需要添加systick定時器的中斷函數,以及systick的配置。
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
操作系統
+關注
關注
37文章
6801瀏覽量
123283 -
移植
+關注
關注
1文章
379瀏覽量
28124 -
定時器
+關注
關注
23文章
3246瀏覽量
114719 -
FreeRTOS
+關注
關注
12文章
484瀏覽量
62139 -
RT-Thread
+關注
關注
31文章
1285瀏覽量
40081
發布評論請先 登錄
相關推薦
i.MX RT1170:VGLite移植RT-Thread Nano過程講解(上)
RT-Thread 是國人自主研發的開源實時操作系統(RTOS),RT-Thread Nano 是極簡版的硬實時內核,內存占用小,移植簡單。VGLite 是 NXP 提供的輕量級 2D
i.MX RT1170:VGLite移植RT-Thread Nano過程講解(下)
上篇介紹了如何移植 RT-Thread Nano 內核與 Finsh 控制臺到 RT1170。本篇繼續介紹如何將 NXP 官方的 VGLit
基于 Keil MDK 移植 RT-Thread Nano
基于 Keil MDK 移植 RT-Thread Nano 本文介紹如何基于 Keil MDK 移植 RT-Thread
發表于 03-29 06:58
基于 Keil MDK 移植 RT-Thread Nano
本文介紹如何基于 Keil MDK 移植 RT-Thread Nano ,并以一個 stm32f103 的基礎工程作為示例進行講解。RT-Thread
發表于 05-19 18:15
【國產MCU移植】HC32F460基于Keil MDK 移植 RT-Thread Nano
【國產MCU移植】HC32F460基于Keil MDK 移植 RT-Thread Nano
發表于 11-18 18:51
?65次下載

【國產MCU系列】在 HK32F030 上移植 RT-Thread Nano
如需下載相關開源資料請點擊閱讀原文這是一個航順 HK32F030 的 RT-Thread Nano 移植示例,記錄了在 Keil 裸機工程的基礎上進行 RT-Thread
發表于 11-21 18:51
?42次下載
【國產MCU系列】在 HK32F030 上移植 RT-Thread Nano
這是一個航順 HK32F030 的 RT-Thread Nano 移植示例,記錄了在 Keil 裸機工程的基礎上進行 RT-Thread Nano
發表于 01-25 17:42
?4次下載
基于 Keil MDK 移植 RT-Thread Nano
本文介紹如何基于 Keil MDK 移植 RT-Thread Nano ,并以一個 stm32f103 的基礎工程作為示例進行講解。 RT-Thread
發表于 01-26 17:04
?16次下載






 工商網監
工商網監
評論