 讓自動駕駛汽車“看透”拐角
讓自動駕駛汽車“看透”拐角
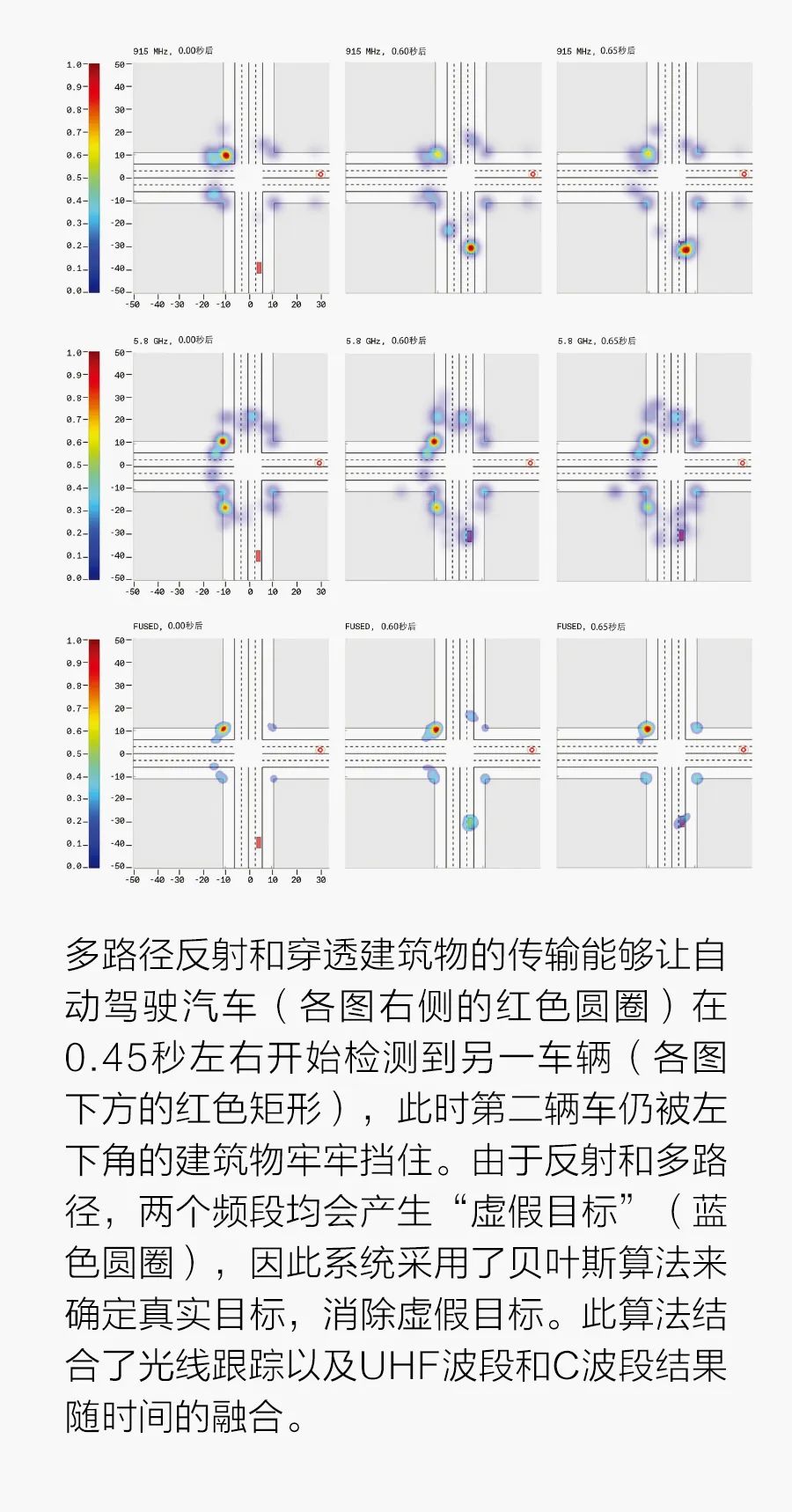
基于駛近城市十字路口(拐角處有4棟高層混凝土建筑)的一輛自動駕駛汽車的建模,可以對自動駕駛汽車看清拐角路況的情形進行仿真。另一輛車正從某方向靠近路口中心,盡管超出了自動駕駛汽車的視距,系統仍可通過處理多條路徑反射回來或直接穿過建筑物返回的信號檢測到該車輛。
要讓自動駕駛汽車名副其實,需滿足諸多要求,但毫無疑問,對環境的感知和了解最為關鍵。自動駕駛汽車必須跟蹤并識別多個物體和目標,無論其清晰可見還是隱而不見,無論艷陽高照還是狂風暴雨。
光靠如今的雷達還遠不足以實現這種效果,我們還需要攝像頭和激光雷達,但若能充分利用雷達的特殊優勢,也許至少可以省去部分輔助傳感器。
誠然,立體模式下的傳統攝像頭可以檢測物體、測量物體距離并估算物體速度,但其精度無法達到完全自動駕駛的要求。此外,攝像頭在夜間、有霧或陽光直射的情況下均無法正常工作,使用傳統攝像頭的系統很容易被視錯覺欺騙。激光掃描系統或激光雷達自帶照明往往在惡劣天氣下的確優于攝像頭。盡管如此,它們也只能在清晰視距內看到前方,在被建筑物或其他障礙物遮擋的情況下,無法檢測到接近十字路口的汽車。
雷達的測距精度和角分辨率不如激光雷達高,角分辨率是在兩個不同目標之間分辨出其中一個目標所需的最小到達角。不過,我們設計了一種新穎的雷達架構,克服了此類缺陷,使其在增強激光雷達和攝像頭方面更加有效。
我們提出的架構采用了稀疏、大口徑多波段雷達。其基本理念是使用多種頻率,利用各頻率的特定屬性,將系統從多變的天氣條件中解放出來,透視并環顧觀察路口情況。反過來,該系統采用了先進的信號處理和傳感器融合算法來生成環境的集成表示。
我們已通過試驗驗證了該雷達系統的理論性能極限,包括有效距離、角分辨率和精度。目前,我們正在為多家汽車制造商構建硬件以進行評估,且最近的道路測試已取得成功。我們在2022年年初進行了更精細的測試,以展示該系統的路口轉角感知性能。
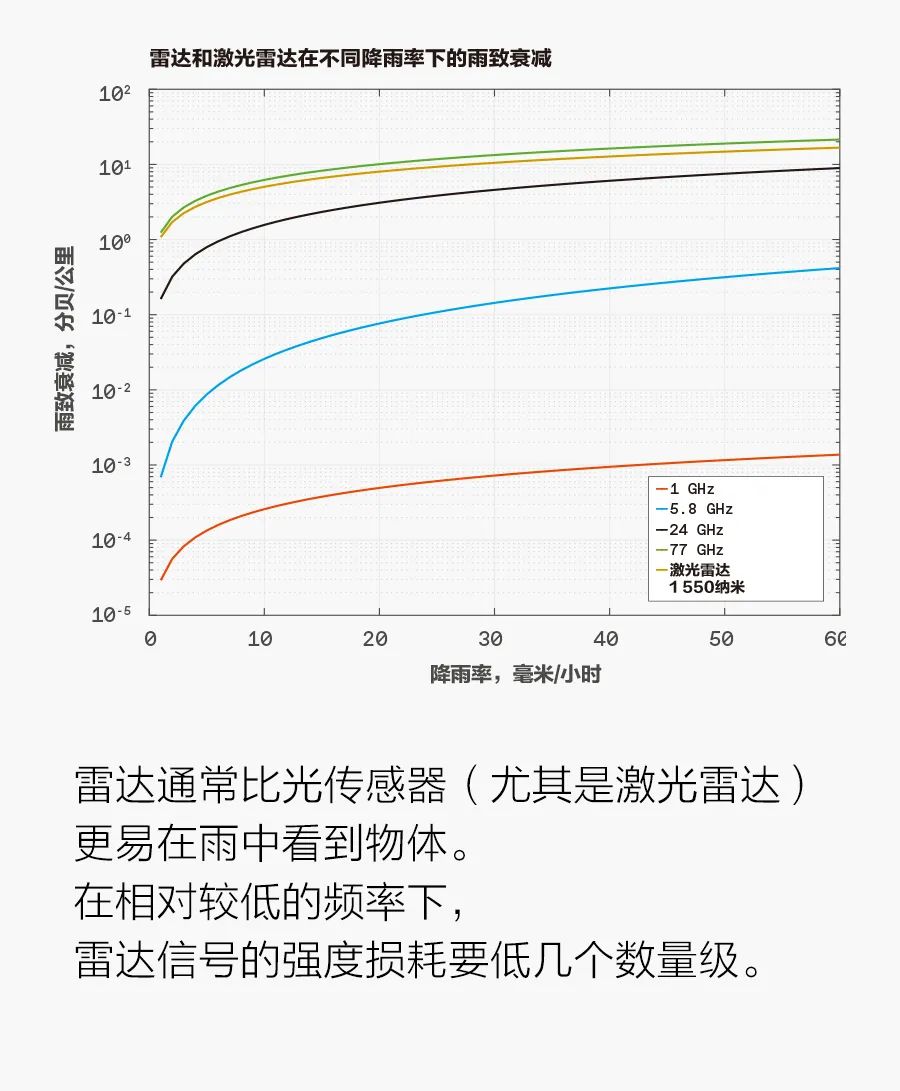
每個頻段皆有其優點和缺點。77千兆赫(GHz)及以下的頻段可穿透1 000米的濃霧,且損耗的信號強度不超過1分貝(dB)。相比之下,激光雷達和攝像頭在50米的濃霧中便會損耗10到15分貝。
雨水則是另一種情況。即便是小陣雨,也會令77GHz雷達像激光雷達一樣衰減。你可能會想,這沒問題,改成更低的頻率就行。畢竟,在1GHz或更低的頻率下,雨對雷達而言可以說是透明的。
低頻確實可行,但我們也需要高頻段,因為低頻段的有效距離較短且角分辨率較低。盡管高頻未必等同于窄波束,但可以使用天線陣列或高度定向天線,以窄波束投射較高頻段中的毫米波,就像激光那樣。這意味著這種雷達可以與激光雷達系統一爭高下,盡管它同樣存在視距之外無法觀測的問題。
對于給定尺寸(即給定陣列孔徑)的天線,波束的角分辨率與工作頻率成反比。同樣,為了實現給定的角分辨率,所需的頻率與天線尺寸成反比。因此,若要在相對較低的超高頻(UHF,0.3 ~1GHz)下依靠雷達系統獲得所需的角分辨率,需要的天線陣列是K波段(18 ~27GHz)或W波段(75 ~110GHz)雷達所需天線陣列的數十倍。
盡管較低的頻率對提高分辨率并無多大幫助,但它有其他優勢。電磁波往往會在尖銳的邊緣衍射;遇到曲面時,它們會在周圍以“爬行”波的形式衍射。這些效應太弱,無法在K波段的較高頻率下產生效果,W波段尤為如此,但在UHF和C波段(4 ~8GHz)可能效果顯著。這種衍射行為以及較低的穿透損耗使此類雷達能夠檢測到拐角處的物體。
雷達的一個弱點在于它會遵循多條路徑,在往返抵達被跟蹤物體的途中會被無數物體反射。由于道路上存在許多其他汽車雷達,因此雷達的回波更為復雜。不過,多次反射也有另一個優勢:范圍廣泛的彈跳可為計算機提供信息,反映沿視距投射的光束無法到達處所發生的情況,例如,揭示直接探測無法看到的交叉路口的路況。
看得遠,看得到細節,看得清側面,甚至能夠直接穿透障礙物,這是雷達尚未完全實現的目標。沒有一個雷達頻段可單獨實現所有效果,但一個可在多頻段同時運行的系統卻可以非常接近這一目標。例如,K波段和W波段等高頻段可實現高分辨率,同時準確估計目標的位置和速度,但它們無法穿透建筑物的墻壁或看清角落情況;更重要的是,它們容易受到大雨、大霧和灰塵的影響。
UHF和C波段等較低頻段不太容易受到上述問題的影響,但它們需要更大的天線元件且可用帶寬較少,這會降低測距分辨率,測距分辨率是區分方位相似但距離不同的兩個物體的能力。要達到既定角分辨率,較低的頻段還需要大孔徑。通過將不同頻段組合在一起,我們可以平衡某個頻段的弱點和其他頻段的優勢。

不同的目標給我們的多頻段解決方案帶來了不同挑戰。汽車前部在UHF波段的雷達截面(或有效反射率)比C波段和K波段的要小。這意味著使用C波段和K波段更容易檢測到正在靠近的車輛。此外,與C波段和K波段相比,在UHF波段,行人的不同行進方向和步態給其截面帶來的變化要小得多。這意味著行人將更容易被UHF雷達探測到。
此外,當散射體表面有水時,物體的雷達截面會減小。這就減少了C波段和K波段可測到的雷達反射,但是此現象不會對UHF雷達產生明顯影響。
另一個重要區別在于較低頻率的信號可穿透墻壁、穿過建筑物,而較高頻率的信號則無法做到這一點。以一堵30厘米厚的混凝土墻為例,雷達波穿過墻壁而非被墻壁反射的能力可通過波長、入射場的極化和入射角的函數計算。UHF頻段在大范圍入射角的傳輸系數約為-6.5dB。C波段和K波段的該數值分別下降為-35dB和-150dB,這意味著可以通過的能量很少。
如前所述,雷達的角分辨率與所用波長成正比,而角分辨率還與孔徑寬度成反比,對于線性陣列天線而言,它與陣列的物理長度成反比。這就是毫米波(如W波段和K波段)可以很好地用于自動駕駛的原因之一。一個基于兩個77GHz收發器、孔徑為6厘米的商用雷達裝置的角分辨率約為2.5度,與典型的激光雷達系統相比,其差值在一個數量級以上,這對自動駕駛而言太低。在77GHz下實現激光雷達標準分辨率需要更大的孔徑(如1.2米),約等于汽車的寬度。
除了達到一定的有效距離和角分辨率之外,汽車的雷達系統還必須跟蹤大量目標,有時需同時跟蹤數百個目標。若目標與汽車的距離僅相隔數米,則可能很難按距離區分目標。在任何給定距離內,一個均勻的線性陣列(發射和接收元件等距分布)能夠區分的目標數量與其天線數量相同。因此,在可能存在大量目標的雜亂環境中,需要數百個類似的發射器和接收器,而且巨大的孔徑會使問題更復雜。如此之多的硬件也會大幅拉高成本。
使用陣列是解決此問題的一種方法,陣列中的元件只占用通常情況下的一部分位置。如果仔細地設計這樣一個“稀疏”陣列,使其相互的幾何距離都是唯一的,便可使其性能與非稀疏的全尺寸陣列相同。例如從一個K波段運行的1.2米孔徑雷達入手,放入設計合理的稀疏陣列,該陣列只有12個發射元件和16個接收元件,則它的性能與擁有192個元件的標準陣列相同。其原因在于,精心設計的稀疏陣列在每個發射器和接收器之間可實現多達12×16(即192)個成對距離。使用12種不同的信號傳輸,16個接收天線將接收192個信號。由于各發射接收對之間的成對距離唯一,因此所得到的192個接收信號就像是由192個元件的非稀疏陣列接收的一樣。所以,借助稀疏陣列,我們可以用時間換取空間,即使用天線元件進行信號傳輸。
原則上,沿車載的假想陣列放置的單獨雷達單元應作為更大孔徑的單個相控陣單元運行。然而,該方案需要單獨子陣列的各發射天線聯合傳輸,并聯合處理聯合子陣的各天線單元收集的數據,這又反過來要求所有子陣列單元的相位完全同步。
這一切都不容易實現。即便可以實現,這種完全同步的分布式雷達的性能仍然遠遠落后于精心設計的完全集成、大口徑稀疏陣列雷達。
假設有兩個77GHz的雷達系統,每個系統的孔徑長度為1.2米,配備12個發射元件和16個接收元件。第一個系統是精心設計的稀疏陣列;第二個系統的孔徑最外側則有兩個14元件標準陣列。這兩個系統的孔徑和天線元件數量相同。盡管集成稀疏設計的掃描效果相同,但分離式設計難以從陣列前部直視前方。這是因為兩束天線相距甚遠,其中心產生了一個盲點。
在采用分離式設計的場景下,可假設兩種情況。第一種情況下,分離式系統兩端的兩個標準雷達陣列幾近完全同步。此設計有45%的時間無法檢測到物體。在第二種情況下,假設各陣列獨立運行,然后將其各自獨立檢測到的對象融合在一起。這一設計有幾乎60%的時間都會檢測失敗。相比之下,精心設計的稀疏陣列檢測失敗的可能性微乎其微。
通過仿真,我們可以輕松描繪出拐角處的景象。假設一輛配備了我們系統的自動駕駛汽車正在靠近一個城市十字路口,路口的4個角落各有一棟高層混凝土建筑。仿真開始時,車輛距離交叉路口中心35米,第二輛車正通過交叉路口接近中心。正在靠近的車輛不在自動駕駛汽車的視距范圍內,因此,如果不使用街角環視技術便無法檢測到駛近的車輛。
雷達系統在3個頻段中的各頻段均可預估視距內目標的距離和方位。在這種情況下,目標的距離等于光速乘以發射的電磁波返回雷達所需時間的一半。目標的方位則通過雷達接收到的波前入射角確定。當目標不在視距范圍內且信號沿多條路徑返回時,此方法無法直接測得目標的距離或位置。
不過,我們可以推斷目標的距離和位置。首先,我們需要區分視距、多路徑和穿過建筑物的返回波。在給定距離內,多路徑返回波(由于多次反射)通常較弱且極化不同。穿過建筑物的回波也較弱。如果我們知道基本環境(建筑物和其他靜止物體的位置),便可以構建一個框架,找出真實目標的可能位置。然后,我們可使用該框架來估測目標在某個位置的可能性。
隨著自動駕駛汽車和各目標的移動,雷達會收集到更多數據,每條新的數據都可用于更新概率。這就是貝葉斯邏輯,與其在醫學診斷中的應用十分類似。病人有無發熱?如發熱,是否出現皮疹?同樣,汽車系統每一次更新估算值,都會縮小可能的范圍,直至最終顯示真實目標的位置,同時消除“虛假目標”。通過融合從多個頻段獲得的信息,可顯著提高系統的性能。
我們通過試驗和數值仿真模擬評估了雷達系統在各種操作條件下的理論性能極限。道路測試證實,雷達可檢測到被遮擋的信號。接下來的幾個月,我們計劃展示轉角感應。希望此類功能能夠實現前所未有的安全駕駛方式。
-
攝像頭
+關注
關注
59文章
4837瀏覽量
95601 -
激光雷達
+關注
關注
968文章
3969瀏覽量
189830 -
自動駕駛
+關注
關注
784文章
13786瀏覽量
166399
原文標題:讓自動駕駛汽車“看透”拐角
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
MEMS技術在自動駕駛汽車中的應用


自動駕駛技術的典型應用 自動駕駛技術涉及到哪些技術
聊聊自動駕駛離不開的感知硬件
FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
自動駕駛汽車如何識別障礙物
自動駕駛汽車傳感器有哪些
吉利與Foretellix合作開發自動駕駛汽車
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
大眾汽車和Mobileye加強自動駕駛合作

自動駕駛發展問題及解決方案淺析
Waymo自愿召回444輛自動駕駛汽車 L4的自動駕駛還有很多路要走






 工商網監
工商網監
評論