") Vitis 庫(kù)流程:視覺(jué) L1 重映射函數(shù) Zynq baremetal 設(shè)計(jì)實(shí)例
Vitis 庫(kù)流程:視覺(jué) L1 重映射函數(shù) Zynq baremetal 設(shè)計(jì)實(shí)例
這篇博客展示了在 AMD Zynq 設(shè)計(jì)中,如何用 Vitis Vision Library 中的函數(shù)(remap)導(dǎo)出一個(gè) IP,并基于此 IP 構(gòu)建一個(gè)的硬件平臺(tái)(XSA),進(jìn)而基于此平臺(tái)來(lái)運(yùn)行嵌入式應(yīng)用。
remap 函數(shù)是指從圖像的某個(gè)位置獲取像素信息,并將這些像素信息重新放置到另一個(gè)圖像的另一個(gè)位置。在此示例中,設(shè)計(jì)將使用 128x128 像素的灰度輸入圖像,然后在輸出端將其水平翻轉(zhuǎn)。
測(cè)試采用以下設(shè)置:
版本: Vivado 和 Vitis 2023.1
操作系統(tǒng):Ubuntu 20.04.1 LTS
硬件:Zynq UltraScale+ ZCU104 評(píng)估板 (xczu7ev-ffvc1156-2-e)
1. 創(chuàng)建 Vitis HLS IP 項(xiàng)目
在本節(jié)中,我們將利用 Vitis Vision L1 庫(kù)提供的預(yù)先存在的 Makefile 來(lái)創(chuàng)建和導(dǎo)出 remap 函數(shù),以便在 Vivado 項(xiàng)目中使用。
打開(kāi)終端選擇一個(gè)適合的路徑位置,并將最新的 Vitis 庫(kù)克隆到該位置:
git clone https://github.com/Xilinx/Vitis_Libraries
跳轉(zhuǎn)至 Vision L1 中名為 remap 的函數(shù)的目錄下:
cd Vitis_Libraries/vision/L1/examples/remap
注:專門就 Vision 庫(kù)而言,需要 OpenCV 庫(kù)才能編譯函數(shù)。請(qǐng)使用下面鏈接中的指令編譯 OpenCV,并在運(yùn)行下一步之前設(shè)置所需的環(huán)境變量。
https://support.xilinx.com/s/article/Vitis-Libraries-Compiling-and-Insta...
設(shè)置 Vitis/Vivado 工具,然后運(yùn)行 HLS 項(xiàng)目腳本來(lái)構(gòu)建 HLS 設(shè)計(jì),并用該設(shè)計(jì)將函數(shù)作為 Vivado IP 導(dǎo)出。

PLATFORM——這是評(píng)估板平臺(tái)名稱,通常可以通過(guò) PLATFORM_REPO_PATHS 環(huán)境變量或在 /base_platforms 中的 Vitis 安裝目錄內(nèi)找到該名稱。
VIVADO_SYN——此參數(shù)通過(guò) export_design 流程運(yùn)行 Vitis HLS 項(xiàng)目,該流程提供項(xiàng)目的壓縮文件作為 Vivado IP。
您還可以打開(kāi) Vitis HLS 項(xiàng)目,通過(guò)命令 vitis_hls -p remap.prj 查看結(jié)果和報(bào)告。
注:由于此 Vitis HLS 項(xiàng)目來(lái)自 Makefile,其并不包括在 GUI 環(huán)境下直接重新運(yùn)行 C Simulation 或 Cosimulation 所需的標(biāo)志和參數(shù)。您可以檢查 remap 文件夾中的 run_hls.tcl 文件,以查看仿真所需要添加的必要標(biāo)志和參數(shù)。
重新運(yùn)行上述指令,添加適當(dāng)?shù)淖兞浚员銖拿钚羞\(yùn)行仿真(例如:CSIM=1 和/或 COSIM=1)。
2. 創(chuàng)建 Vivado 平臺(tái)項(xiàng)目
本節(jié)將展示如何使用上一節(jié)中創(chuàng)建的 Vitis HLS IP 來(lái)創(chuàng)建一個(gè)以 ZCU104 為目標(biāo)器件的自定義平臺(tái)。
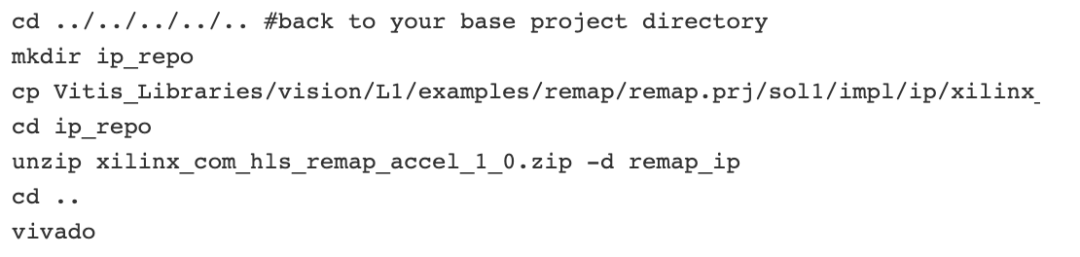
將上一節(jié)中創(chuàng)建的導(dǎo)出 IP 復(fù)制到它自己的存儲(chǔ)庫(kù)位置,然后打開(kāi) Vivado。
按照下列步驟創(chuàng)建項(xiàng)目并對(duì)其進(jìn)行設(shè)置:
選擇 Create Project,點(diǎn)擊 Next:
輸入項(xiàng)目名稱:remap_vivado,點(diǎn)擊 Next
選擇 RTL 項(xiàng)目,此時(shí)不要指定源文件,點(diǎn)擊 Next
在評(píng)估板選項(xiàng)卡,選擇 Zynq UltraScale+ ZCU104 評(píng)估板,點(diǎn)擊 Next,然后選擇 Finish
打開(kāi)項(xiàng)目后:
在左側(cè)的流程導(dǎo)航器中選擇 Project Manager > Settings
選擇 IP > Repository,點(diǎn)擊 + 并在此添加 ip_repo 文件夾的位置,然后關(guān)閉窗口
我們現(xiàn)在可以添加自定義 IP 及其余的模塊:
在左側(cè)的流程導(dǎo)航器中,選擇 IP Integrator > Create Block Design
為原理圖選擇描述性名稱,或保留其默認(rèn)值,然后選擇 OK
選擇 +(添加 IP),并選擇 Remap_accel 模塊
選擇 +(添加 IP),并選擇 Zynq UltraScale+ MPSoC 模塊
點(diǎn)擊窗口頂部橫幅上的 Run Block Automation。
確保勾選 Apply Board Preset,然后選擇 OK
現(xiàn)在,我們將配置 MPSoC 模塊,使其具有合適的接口,能夠與 IP 進(jìn)行通信:
雙擊圖中的 MPSoC 模塊,并做出以下修改。我們將關(guān)閉本設(shè)計(jì)中不會(huì)用到的一些功能。
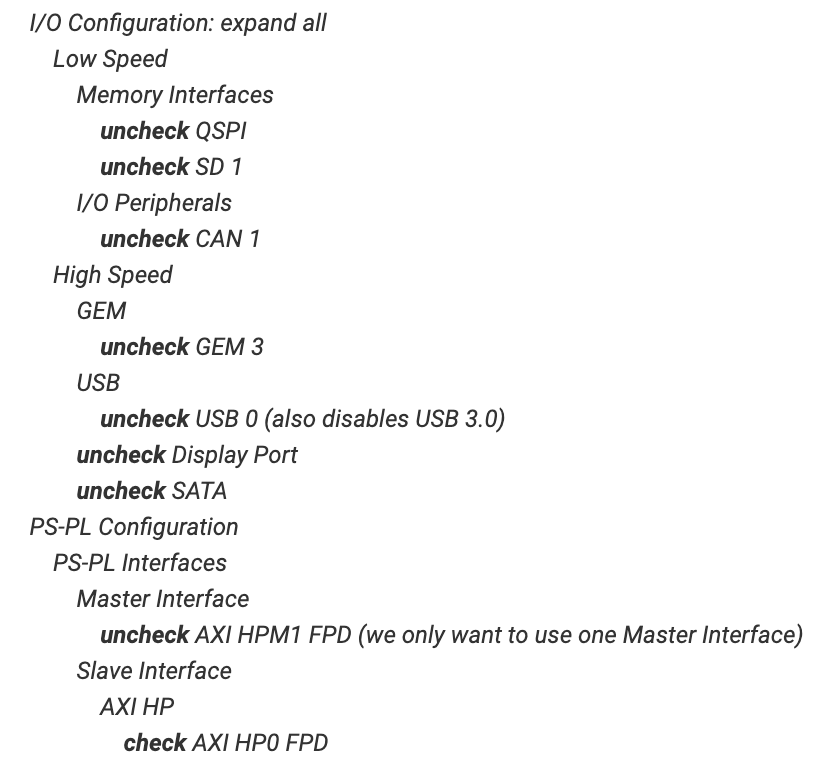
更改這些設(shè)置后,選擇 OK 將這些變更應(yīng)用到 MPSoC 模塊上。
我們現(xiàn)在可以使用連接自動(dòng)化功能將這些模塊彼此連接:
點(diǎn)擊 Run Connection Automation
勾選全部自動(dòng)化,然后選擇 OK
點(diǎn)擊 Run Connection Automation(第二次運(yùn)行會(huì)把 IP 其它的 AXI 接口也鏈接起來(lái),這些接口是IP互聯(lián)接口的一部分)
勾選全部自動(dòng)化,然后選擇 OK
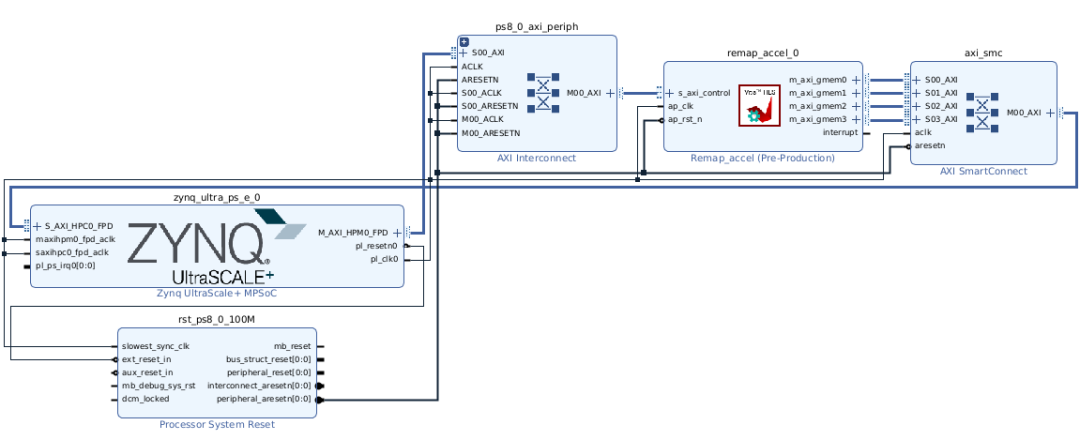
此刻的設(shè)計(jì)應(yīng)類似于下圖(您可以點(diǎn)擊工具欄上的“Regenerate”,可自動(dòng)對(duì)各個(gè)模塊進(jìn)行重新排列):
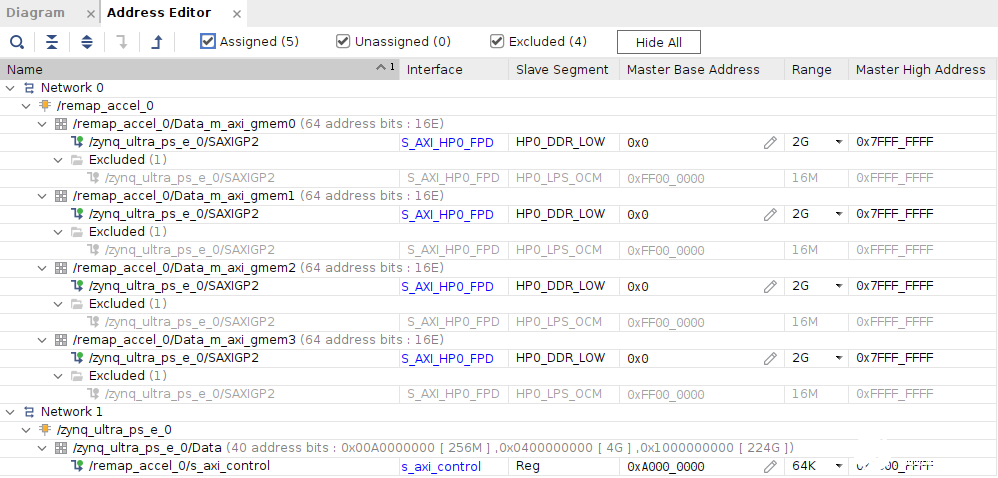
檢查 Address Editor 選項(xiàng)卡。請(qǐng)注意,默認(rèn)自動(dòng)分配地址,AXI 和 IP 控件的地址空間設(shè)置為 0x0 和 0xA000_0000。
返回至圖表選項(xiàng)卡,選擇工具欄上的 Validate Design 按鈕,或者在 Vivado 的主窗口中使用 Tools > Validate Design。確保設(shè)計(jì)無(wú)誤。
在 Sources 窗口的 Sources 選項(xiàng)卡中,展開(kāi) Design Sources ,右鍵點(diǎn)擊當(dāng)前模塊設(shè)計(jì),選擇 Create HDL Wrapper(選擇 Let Vivado manage wrapper and auto-update),然后點(diǎn)擊 OK。
在左側(cè)的 Flow Navigator 中,選擇 Generate Block Design,保留默認(rèn)選項(xiàng),然后點(diǎn)擊 Generate。您可以在 Design Runs 選項(xiàng)卡中監(jiān)視運(yùn)行狀態(tài)。
完成上述步驟后,點(diǎn)擊 Generate Bitstream,選擇 Yes/OK 來(lái)運(yùn)行生成比特流的必要流程。完成創(chuàng)建后,您可以點(diǎn)擊 Cancel 關(guān)閉打開(kāi)的對(duì)話框,結(jié)束操作。
現(xiàn)在我們可以將硬件平臺(tái)導(dǎo)出為 XSA 格式,以便 Vitis 與我們的應(yīng)用一起使用。
在頂部工具欄中選擇 File > Export > Export Hardware
選擇 Next
選擇 Include bitstream,點(diǎn)擊 Next
設(shè)置 XSA 文件名:remap_platform,點(diǎn)擊 Next,然后點(diǎn)擊 Finish。輸出的 XSA 文件默認(rèn)保存在項(xiàng)目的根目錄
3. 創(chuàng)建 Vitis 應(yīng)用項(xiàng)目
現(xiàn)在我們已經(jīng)從 Vivado 導(dǎo)出了一個(gè)平臺(tái) XSA,我們可以使用這個(gè)文件來(lái)定義我們的平臺(tái),并創(chuàng)建一個(gè)應(yīng)用程序來(lái)在平臺(tái)內(nèi)通信和運(yùn)行 IP。
打開(kāi) Vitis,然后導(dǎo)入 XSA:
vitis -workspace remap_ws
此操作會(huì)打開(kāi)工作空間為 remap_ws 的 Vitis GUI。
創(chuàng)建應(yīng)用項(xiàng)目
選擇 Next
從頂部的選項(xiàng)卡中選擇 Create a new platform from hardware (XSA),然后瀏覽上一節(jié)的 remap_platform.xsa 文件,接著選擇 Next
設(shè)置應(yīng)用項(xiàng)目名稱:remap_project,選擇將 psu_cortexa53_0 用作處理器,然后選擇 Next
保留默認(rèn)域信息(Standalone OS),然后選擇 Next
選擇“Empty Application (C)”模板,然后選擇 Finish
本博文包括參考文件,可供下載(點(diǎn)擊閱讀全文查看參考文件)。可將這些文件解壓到項(xiàng)目的根目錄中。
在“Explorer”窗口展開(kāi) remap_project_system > remap_project > src,右鍵點(diǎn)擊 src,選擇 Import Sources,瀏覽保存參考文件的目錄,選擇并導(dǎo)入下列文件:
remap_example_app.c
remap_input_image.h
remap_x_map.h
remap_y_map.h
文件導(dǎo)入后,可隨時(shí)檢查 remap_example_app.c 文件,以查看應(yīng)用正在執(zhí)行的操作。總之,應(yīng)用程序用 DDR 內(nèi)存中的輸入圖像和映射數(shù)組數(shù)據(jù)配置 IP,并指示 IP 處理數(shù)據(jù)并將其寫回 DDR 內(nèi)存。
現(xiàn)在,我們可以構(gòu)建平臺(tái)并編譯應(yīng)用,以使其直接在 ZCU104 板上運(yùn)行。
在助手窗口中:
選擇 remap_platform [Platform],并使用 Build 按鈕(錘子圖標(biāo)),等待 Build Finished 消息出現(xiàn)
選擇 remap_project_system [System],并使用 Build 按鈕(錘子圖標(biāo)),等待 Build Finished 消息出現(xiàn)
完成構(gòu)建過(guò)程可能需要一些時(shí)間,時(shí)間長(zhǎng)短取決于您的系統(tǒng)。
4. 在硬件上運(yùn)行應(yīng)用
現(xiàn)在,我們可以運(yùn)行設(shè)計(jì)并驗(yàn)證 remap 函數(shù)的運(yùn)行。
在助手窗口中,選擇 remap_project_system [System],使用綠色運(yùn)行圖標(biāo),選擇 Launch Hardware。
一旦完成設(shè)計(jì)運(yùn)行,且硬件仍在運(yùn)行時(shí),選擇 XSCT 窗口。如果窗口未打開(kāi),選擇 Vitis > XSCT Console。
在控制臺(tái)運(yùn)行以下命令:
xsct% source remap_memory_copy.tcl
注:此腳本是參考文件的組成部分。您也可以指文件的完整路徑,或使用“cd”跳轉(zhuǎn)至適當(dāng)?shù)哪夸洝?/p>
此腳本將讀取內(nèi)存中“input_buffer”和“output_buffer”的數(shù)據(jù),并將數(shù)據(jù)分別保存為 input.data和 output.data。在繼續(xù)操作之前等待完成消息。
在創(chuàng)建完 input.data 文件和 output.data 文件后,您現(xiàn)在可以通過(guò)運(yùn)行 Python 腳本來(lái)驗(yàn)證 remap 函數(shù)是否已成功執(zhí)行圖像的水平翻轉(zhuǎn)。運(yùn)行下列 Python 腳本:
python3 remap_convert_image.py
注:運(yùn)行此腳本需要安裝“numpy”和“Pillow” Python 包,通常使用“pip install numpy”和“pip install Pillow”命令來(lái)安裝這些包。
此腳本將輸出兩種文件,一個(gè)是 input.png,另一個(gè)是 output.png,表示發(fā)送到硬件的輸入圖像,以及通過(guò) IP 傳遞后的輸出圖像。
責(zé)任編輯:彭菁
-
函數(shù)
+關(guān)注
關(guān)注
3文章
4353瀏覽量
63296 -
Zynq
+關(guān)注
關(guān)注
10文章
611瀏覽量
47488
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
請(qǐng)問(wèn)TMS320F2809中的L0/L1/H0 SARAM雙重映射數(shù)據(jù)段和程序段的地址空間能重合嗎?
STM32重映射是什么意思
基于映射函數(shù)收縮算法的圖像去噪方法

利用Vitis HLS tcl shell一鍵跑通視覺(jué)加速例程
華大HC32L110 printf重映射UART

STM32 部分重映射和完全重映射
STM32庫(kù)函數(shù)關(guān)于CAN1通訊重映射發(fā)生錯(cuò)誤問(wèn)題
視覺(jué)L1重映射函數(shù)Zynq baremetal設(shè)計(jì)實(shí)例

視覺(jué)L1重映射函數(shù)Zynq baremetal設(shè)計(jì)實(shí)例

在Zynq裸機(jī)設(shè)計(jì)中使用視覺(jué)庫(kù)L1 remap函數(shù)的示例

如何在Vitis HLS GUI中使用庫(kù)函數(shù)?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論