

在如今4D毫米波雷達遍地橫行的年代,出現了一些新的概念。
4D毫米波雷達與傳統雷達不同,為了解決傳統毫米波雷達角分辨率低、點云密度低的問題,當下出現了四種4D毫米波雷達解決方案:
一是基于傳統CMOS雷達芯片,強調“軟件定義的雷達”,主要廠家有傲酷、Mobileye、Zadar等。
二則是將多發多收天線集成在一顆芯片,直接提供成像雷達芯片,比如Arbe、Vayyar等。
三是最傳統的,即將標準雷達芯片進行多芯片級聯,以增加天線數量,比如大陸、博世、ZF等一眾公司。
四則是通過超材料研發新型雷達架構,代表廠家有Metawave等,Metawave采用波束掃描方式提高角度分辨率。
其它三種都容易理解,什么是軟件定義的雷達,它和軟件化雷達有什么區別?今天就在這里簡單和大家聊聊。
軟件定義雷達、軟件定義的雷達、軟件化雷達、雷達軟件化、軟件定義無線電,這些概念有點懵。經過分析可以確定,軟件定義雷達,就是軟件定義的雷達;軟件化雷達(SR)和雷達軟件化,前一個是名詞,后一個是動詞,其實最終都是指代同一個東西。軟件定義無線電(SDR,Software Defined Radio)和軟件定義雷達(SDR,Software Defined Radar)有相似的模塊,只是最終的功能不同。
1、軟件化雷達
有軟件化雷達,就應該有“硬件化雷達”,其實最開始的雷達就是純粹由硬件來實現的,可以看作是“硬件化雷達”,但這導致了雷達功能的單一性和固定性,決定了只能依靠更改系統的硬件來改變系統的參數,不利于雷達裝備的研制、生產和維護。簡單舉個例子,比如,某個模塊需要換方案,這樣雷達就需要從硬件上進行更改,耗時費力,且該模塊具有定制特性,無通用特性,每次修改方案都要重新設計,因此純粹由硬件搭建的雷達會直接影響雷達裝備的通用化和標準化建設。
軟件化雷達通過軟件界面來表示功能,并能夠根據功能需求來驅動整個軟件雷達系統的開發,具備良好的通用性、兼容性和可擴展性。其核心思想是:在滿足雷達性能的前提下,能用軟件實現,就絕對不用硬件實現,更改代碼可比更改硬件簡單多了。
軟件化雷達是對從雷達顯控終端到雷達數據采集卡的功能逐步由軟件實現的過程,且功能越來越靠近天線,具有高度的靈活性、開放性和完全可編程性。
雷達傳感器:雷達傳感器是為雷達服務器輸入雷達原始數據(雷達回波信號)的設備,主要包括雷達射頻天線、天線收發開關、雷達接發機等雷達前端的硬件模塊。將雷達傳感器看作獨立的模塊,是整個軟件化雷達開放式系統設計最直接的體現,使得軟件化雷達設計不再局限于某個型號雷達前端硬件設計,實現了真正意義上的軟件雷達的通用性、開放性和靈活性。
雷達服務器:雷達服務器是實現雷達視頻信號采集、信號處理、數據處理等功能的設備。
(1)射頻就是調制后的微波頻段,“射”字不可以單獨理解為發射。發射機調制器(激勵器)出來的,包括到強放、天線開關、各種波導、合路器、傳輸系統、直到喇叭口等都叫射頻。(硬件在發射機、傳輸系統、天線)。
(2)基帶就是去調制器的弱信號。巴克碼脈沖、各種脈沖信號。(硬件在發射機里)。
(3)中頻就是接收機經過混頻變頻回來的信號。(硬件在接收機里)。
(4)視頻就是中頻經過各種濾波、各種網絡處理之后送去顯示器的信號。(硬件在控制臺里)
雷達顯控終端:雷達顯控終端是能接收雷達視頻信號,并對接收到的信號進行顯示和控制的設備。將雷達顯控終端作為一個單獨的模塊進行設計實現了雷達“顯示”和“處理”的分離,使得系統具有更強的兼容性、可擴展性,靈活性。
但是如何才能夠使雷達具備這樣的功能呢?
雷達對信號采集、處理實時性要求很高,并且需要執行大量的數學函數運算;通用硬件可以滿足處理的實時性,但是難以滿足數學運算的全部功能。軟件實現的信號處理,容易達到算法精度要求,但實時性問題又不能滿足。面對如此矛盾的問題,能夠尋找到一個能夠快速、高精度實現雷達信號采集的方法是問題的關鍵。
FPGA能夠進行一些簡單的運算,且處理精度、功能完善程度優于一般的電子硬件。在一定程度上既可以滿足雷達信號采集、信號簡單處理的實時性要求,又能保證誤差在一定的范圍內,因此在雷達數字信號處理領域具有非常廣闊的前景,可以用于高速數據采集、存儲和傳輸,如果讀者有興趣,可以將FPGA和雷達結合起來學習。
由于雷達數據量比較大,且要求實時傳輸和處理,雷達顯控終端和雷達服務器分別需要兩臺計算機,既要處理速度,也要充足的內存。
軟件化雷達的系統設計框圖如下所示:
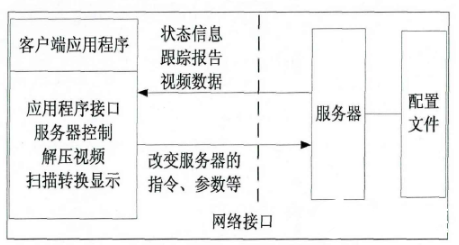
圖1 軟件化雷達結構框圖
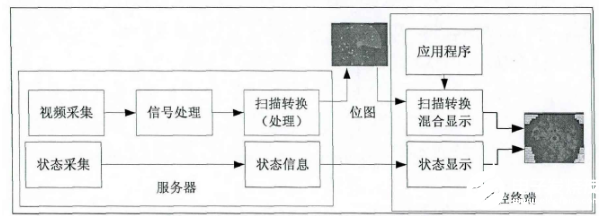
圖2軟件化雷達處理和顯示框圖
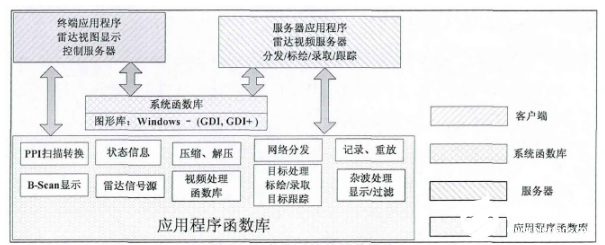
圖3 軟件化雷達的軟件模塊
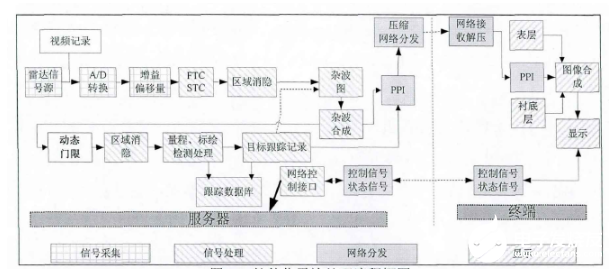
圖4 軟件化雷達處理流程
總結:“軟件化雷達”的核心特征體現在:標準化、模塊化和數字化特征、開放式的體系架構以及“以軟件技術為核心,面向應用需求的開發模式和傳統的“以硬件技術為核心面向專用功能的開發模式不同,軟件化雷達注重軟件和硬件的解耦,從而使得可以通過軟件定義方式快速開發雷達系統,并靈活地實現系統資源配置、 功能擴展和性能提升,以滿足實際應用的需求。
2、軟件定義雷達
軟件定義雷達是指雷達的內部模塊可通過軟件配置,軟件定義雷達框圖如下圖所示。
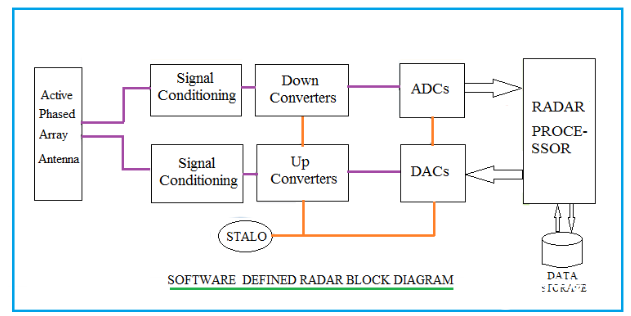
上圖描述的軟件定義雷達框圖,主要由以下模塊組成:
(1)射頻/微波部分:由信號調理模塊組成, 上變頻器和下變頻器,本地振蕩器和有源相控陣天線。
? 信號處理模塊:具備多個通道,可處理模擬信號。
? 上變頻器: DUC,即數字上變頻器。
? 下變頻器: DDC,即數字下變頻器。
?本振:它們是高度穩定的本振,用于在 DUC、DDC、DAC 和 ADC 之間提供非常精細的同步。
? 有源相控陣天線:該天線陣列負責多種無線電信號發射和接收。
(2)中頻/基帶部分:由高采樣ADC和DAC組成。ADC/DAC支持寬輸入信號帶寬,高采樣速率ADC/DAC可用于直接采樣發射器和直接采樣接收器設計。
? ADC:執行模數轉換,處理DDC接收的數據,ADC的數據輸出給處理器進行進一步處理。
? DAC:執行數模轉換,處理要傳輸的雷達數據并輸入DUC。
(3)雷達處理器和數據存儲模塊。
? 雷達處理器:開發復雜的信號處理算法,并將其移植到軟件定義雷達的處理器上。
? 數據存儲模塊負責根據用戶要求提供結果存儲。
軟件定義雷達架構的優勢
(1)軟件配置的模塊允許工程師使用通用的可用硬件集快速原型化和測試、驗證所選的先進雷達系統。
(2)軟件定義的雷達得益于軟件定義無線電模塊的大量可用性,采用易于集成現成的模塊,將節省大量的時間和研發成本。
(3)軟件定義的雷達有助于分析具有非常寬信號帶寬的無線電信號。
3、結論
軟件定義雷達和軟件化雷達是兩種不同的雷達技術,初學者很容易混淆這兩個概念,因此在這里我按照自己的理解,搜集整理了一些資料,希望能夠說清楚。
軟件定義雷達是一種可以通過修改或更新軟件來配置和控制雷達的工作方式的雷達系統。通過將雷達的信號處理、信號發射功能轉移到軟件中實現,從而使得雷達可以通過改變軟件來實現不同的功能,比如單芯片毫米波雷達,可通過軟件來控制、配置雷達,并用軟件實現雷達信號處理、數據處理和其他高級算法等功能。我理解的軟件定義雷達主要體現一種靈活修改雷達的工作方式為核心,還是要以雷達芯片為中心,需要依靠硬件設計不同的算法實現需要的功能。
軟件化雷達是一種通過軟件編程來替代雷達硬件的雷達系統,是通過軟件來替代雷達硬件,從而通過將雷達的所有功能都嵌入到軟件中實現,從而使雷達變得更為靈活和可靠,以及實現標準化。我理解的軟件化雷達主要體現在雷達幾乎所有功能都到軟件(計算機、服務器、顯卡、CUDA)上去實現,脫離了雷達信號處理芯片,雷達射頻前端僅僅是為了采集雷達原始數據,可以采用不同的射頻前端,這樣就不依靠硬件了。
審核編輯:湯梓紅
-
射頻
+關注
關注
106文章
5729瀏覽量
169749 -
SDR
+關注
關注
7文章
235瀏覽量
50998 -
毫米波
+關注
關注
21文章
1968瀏覽量
65710 -
雷達傳感器
+關注
關注
3文章
294瀏覽量
34834
發布評論請先 登錄
軟件無線電(SDR)平臺帶你從頻譜共享到5G研發
軟件化雷達在并行信號處理系統上的實現Implementati
基于Linux的軟件化和網絡化雷達終端系統的實現
軟件化和網絡化的基于Linux的雷達終端系統
如何使用SDR設計寬帶雷達發射機的論文說明







 工商網監
工商網監

評論