 DCM是什么?DCM在AUTOSAR中的位置
DCM是什么?DCM在AUTOSAR中的位置
DCM是什么
DCM全稱Diagnostic Communication Manager,它位于AUTOSAR基礎軟件的服務層,它的主要作用是為開發和生產階段提供與診斷儀交互的診斷服務。
DCM模塊可以保證診斷數據流的正確性,管理診斷狀態,比如會話狀態和安全訪問等級狀態。DCM會檢查某個診斷請求是否被支持,以及在當前的會話狀態和安全訪問等級下下該診斷請求會不會被執行。
DCM在AUTOSAR中的位置
DCM模塊在AUTOSAR架構中的位置如下圖:
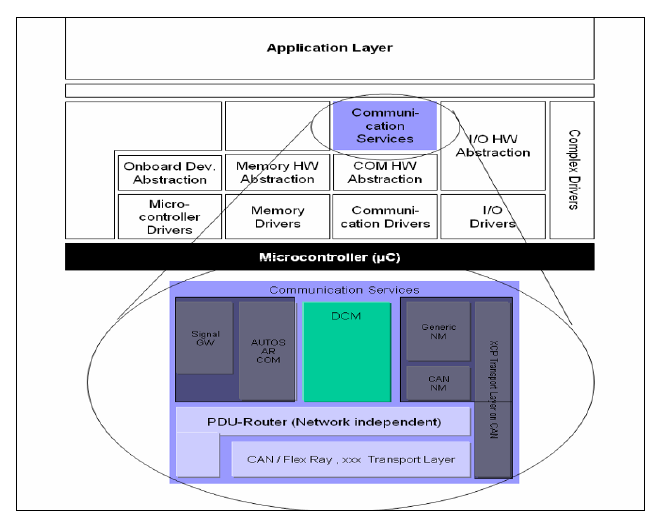
DCM模塊獨立于網絡總線,也就是說DCM不區分接收到的診斷請求是來自于CAN總線還是LIN總線,抑或是Flexray總線,所有與總線有關的處理都在PDUR模塊完成。DCM模塊從PDUR接收診斷報文,然后在DCM內部完成檢查和處理。在這個過程中DCM將會與其他BSW模塊或SWC(通過RTE)進行交互,以獲得需要的數據或者執行相應的命令。DCM最終會收集并整合信息,最后發送響應報文給PDUR模塊。
DCM包含的子模塊
為了合理的分配DCM的各項任務,DCM被劃分為如下三個子模塊:
- DSL(Diagnostic Session Layer):處理診斷請求和響應的數據流,監督和管理診斷協議時序,管理會話和安全訪問狀態。
- DSD(Diagnostic Service Dispatcher):檢查診斷請求的有效性(診斷ID是否支持、會話狀態、安全等級),把有效的診斷請求委托給DSP,并追蹤診斷請求的處理
- DSP(Diagnostic Service Processing):檢查診斷請求格式以及診斷子服務是否支持,獲得需要返回的數據或者執行需要被調用的函數(調用SWC的函數寫數據到NVM,調用DEM的服務獲得DTC狀態)、填充response的數據
DCM各個子模塊及其他軟件模塊之間的交互
下面利用一張圖來厘清DCM各個子模塊之間的關系,以及與其他軟件模塊的交互關系。
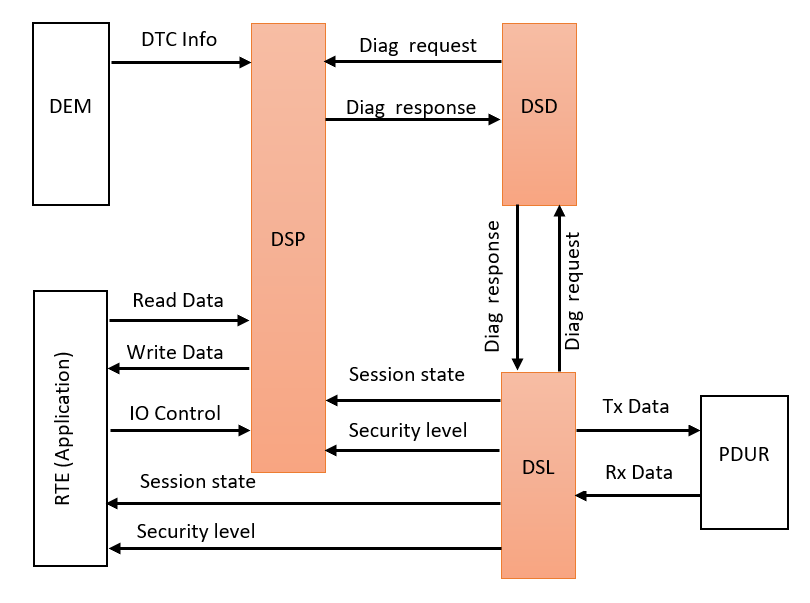
現在通過診斷儀發送一條配置車輛識別碼(VIN)的診斷命令,看一下DCM的整個處理流程。
- 首先這條診斷報文(0x2E, 0xF1, 0x90, ......)會經由PDUR傳送到DSL,DSL會先確認當前是否有其他診斷請求正在處理,如果沒有將會把該診斷請求發送給DSD模塊。
- DSD模塊收到0x2E的診斷報文后,會先判斷服務ID 0x2E在不在當前的Service Identifier Table中,如果不在將會拒絕該請求(一般情況下ECU都是支持0x2E服務的,這里只是舉例子),如果該服務ID在Service Identifier Table中,接下來要判斷當前的診斷會話(從DSL獲取)是否為擴展會話,以及當前的安全訪問狀態是否允許0x2E寫入。如果所有檢查通過,則會把該診斷請求委托給DSP模塊。否則將會拒絕該診斷請求,并通知DSL發送響應的負反饋到PDUR。
- DSP收到0x2E的診斷請求后,會先檢查請求的格式,比如總的報文長度是否符合定義,以及診斷子服務0xF190是否支持。如果校驗通過則調用APP層相應的SWC的函數,把VIN數據寫入到NVM。然后準備正響應報文并發送給DSD,DSD再發送給DSL,最后通過PDUR發送到相應到網絡總線上。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
LIN總線
+關注
關注
19文章
109瀏覽量
27513 -
AUTOSAR
+關注
關注
10文章
362瀏覽量
21623 -
DCM
+關注
關注
0文章
159瀏覽量
26510 -
ECU軟件
+關注
關注
1文章
13瀏覽量
10339 -
DTC控制
+關注
關注
0文章
18瀏覽量
1193
發布評論請先 登錄
相關推薦
轉載----DCM使用詳解
輸出,但是進入全局時鐘網的路徑最多只有4個。DCM的位置在哪?我們以Spartan3系列為例。FPGA看上去就是一個四方形。最邊緣是IO pad了。除去IO pad,內部還是一個四方形。四個角上各趴著
發表于 09-24 15:04
DCM在FPGA中指的是什么?
上,BUFG的輸出引腳反饋回來接在DCM的反饋時鐘腳CLKFB上。另外,在FPGA里,只有BUFG的輸出引腳接在時鐘網絡上,所以一般來說你可以不使用DCM,但你一定會使用BUFG。DCM
發表于 08-31 09:08
是否可以在DCM保持復位期間使用DCM的狀態輸出
嗨,我們在這里有一個Spartan6設備,想知道我們是否可以在DCM保持復位期間使用DCM的狀態輸出。在啟動時,我們希望將DCM保持
發表于 05-15 08:34
如何鎖定DCM
你好在DCM中有一個RESET輸入引腳。我已將RESET引腳指定為分配RESET = ~LOCKED // DCM鎖定,希望這將使RESET從開始起至少保持三個時鐘周期。當我使用這種類型的賦值
發表于 06-06 07:23
BUFG到DCM怎么進行連接
bufg_inst。為了正確操作,它們都應放在同一半上。BUFGCTRL輸入由IBUFDS驅動,均在上半部分。 DCM位于下半部分。 但是,Virtex-5用戶指南在第47頁中說明:2。 BUFGCTRL
發表于 06-02 13:49
什么是CCM和DCM
內電感磁通從不回到0,功率管閉合時,線圈中還有電流流過。DCM,(Discontinuous Conduction Mode)非連續導通模式:在開關周期內,電感電流總會會到0,意...
發表于 10-29 09:03
rtthread dcm組件dcm_cache_save接口mkdir:/data failed怎樣去解決呢
然后確認了宏#define DCM_DEFAULT_STORAGE_NAME "/user/data/db/dcm" 在rtconfig.h中已經聲明,同時業務代碼
發表于 01-27 06:43
FPGA設計中DCM的原理分析及應用研究
為了應用FPGA中內嵌的數字時鐘管理(DCM)模塊建立可靠的系統時鐘。首先對DCM的工作原理進行分析,然后根據DCM的工作原理給出了一種DCM
發表于 07-28 17:03
?28次下載
如何使用DCM,DCM使用說明
DCM主要功能1. 分頻倍頻:DCM可以將輸入時鐘進行multiply或者divide,從而得到新的輸出時鐘。2. 去skew:DCM還可以消除clock的skew,所謂skew就是由于傳輸引起的同一時鐘到達
發表于 06-05 11:48
?8232次閱讀
賽靈思DCM概述和應用技巧
DCM:即 Digital Clock Manager 數字時鐘管理,關于DCM的作用: 顧名思義DCM的作用就是管理,掌控時鐘的專用模塊。
發表于 02-11 11:30
?1450次閱讀
使用DCM怎樣消除時鐘Skew?
什么叫DCM(Digital Clock Management)? DCM內部是DLL(Delay Lock Loop(?)結構,對時鐘偏移量的調節是通過長的延時線形成的。DCM的參數里有一個PHASESHIFT(相移),可以從
rtthread dcm組件dcm_cache_save接口mkdir:/data failed解決辦法
然后確認了宏#define DCM_DEFAULT_STORAGE_NAME "/user/data/db/dcm" 在rtconfig.h中已經聲明,同時業務代碼
發表于 12-03 18:06
?6次下載






 工商網監
工商網監
評論