

人工智能(ArtificialIntelligence,簡稱 AI)在 60 多年的發(fā)展歷史中,一直存在兩個相互競爭的范式,即符號主義與連接主義(或稱亞符號主義)。符號主義(即第一代人工智能)到上個世紀(jì)八十年代之前一直主導(dǎo)著 AI 的發(fā)展,而連接主義(即第二代人工智能)從上個世紀(jì)九十年代逐步發(fā)展,到本世紀(jì)初進(jìn)入高潮,大有替代符號主義之勢。但是今天看來,這兩種范式只是從不同的側(cè)面模擬人類的心智 (或大腦),具有各自的片面性,不可能觸及人類真正的智能。 清華大學(xué)人工智能研究院院長、中國科學(xué)院院士張鈸教授在「紀(jì)念《中國科學(xué)》創(chuàng)刊 70 周年專刊」上發(fā)表署名文章,首次全面闡述第三代人工智能的理念,提出第三代人工智能的發(fā)展路徑是融合第一代的知識驅(qū)動和第二代的數(shù)據(jù)驅(qū)動的人工智能, 同時利用知識、數(shù)據(jù)、算法和算力等 4 個要素, 建立新的可解釋和魯棒的 AI 理論與方法,發(fā)展安全、可信、可靠和可擴(kuò)展的 AI 技術(shù),這是發(fā)展 AI 的必經(jīng)之路。 自 2018 年成立以來,清華大學(xué)人工智能研究院本著「一個核心、兩個融合」的發(fā)展戰(zhàn)略,大力推動人工智能的基礎(chǔ)理論和基本方法的源頭性和顛覆性創(chuàng)新,在人工智能基礎(chǔ)理論、關(guān)鍵技術(shù)和產(chǎn)學(xué)研合作等諸方面取得了創(chuàng)新成果。人工智能的序幕剛剛拉開,正劇正在上演。基礎(chǔ)研究是科技創(chuàng)新的源頭,尤其在當(dāng)前復(fù)雜多變的國際環(huán)境下,更需要提升我國的原始創(chuàng)新能力,久久為功,努力實現(xiàn)人工智能領(lǐng)域更多「從 0 到 1」的突破。 以下全文刊載張鈸院士的文章《邁向第三代人工智能》。
1.第一代人工智能
人類的智能行為是怎么產(chǎn)生的, 紐威爾 (A.Newell)、西蒙 (H.A.Simon) 等 提出以下模擬人類大腦的符號模型, 即物理符號系統(tǒng)假設(shè)。這種系統(tǒng)包括: (1) 一組任意的符號集, 一組操作符號的規(guī)則集; (2) 這些操作是純語法(syntax)的,即只涉及符號的形式不涉及語義,操作的內(nèi)容包括符號的組合和重組; (3)這些語法具有系統(tǒng)性的語義解釋,即它所指向的對象和所描述的事態(tài)。 1955 年麥卡錫 (J.McCarthy) 和明斯基 (M.L.Minsky) 等學(xué)者,在達(dá)特茅斯人工智能夏季研究項目 (the Dartmouth Summer Research Projecton ArtificialIntelligence) 的建議中, 明確提出符號 AI(artificialintelligence) 的基本思路:「人類思維的很大一部分是按照推理和猜想規(guī)則對‘詞’(words)進(jìn)行操作所組成的」。根據(jù)這一思路,他們提出了基于知識與經(jīng)驗的推理模型,因此我們又把符號 AI 稱為知識驅(qū)動方法。 符號 AI 的開創(chuàng)者最初把注意力放在研究推理(搜索)的通用方法上,如「手段–目的分析」(meanendanalysis)、「分而治之」(divideandconquer)、「試錯」(trialanderror)法等,試圖通過通用的方法解決范圍廣泛的現(xiàn)實問題。由于通用方法是一種弱方法,實際上只能解決「玩具世界」中的簡單問題,如機(jī)器人擺放積木,下簡單的井字棋(tic-tac-toe)等,與解決復(fù)雜現(xiàn)實問題相差很遠(yuǎn)。尋求通用 AI 的努力遭到了失敗,符號 AI 于 20 世紀(jì) 70 年代初跌入低谷。
幸運的是,斯坦福大學(xué)教授費根堡姆(E. A. Feigenbaum)等及時改變了思路,認(rèn)為知識,特別是特定領(lǐng)域的知識才是人類智能的基礎(chǔ),提出知識工程(knowledgeengineering)與專家系統(tǒng)(expertsystems)等一系列強(qiáng) AI 方法,給符號 AI 帶來了希望。他們開發(fā)了專家系統(tǒng) DENDRAL(有機(jī)化學(xué)結(jié)構(gòu)分析系統(tǒng),1965~1975),隨后其他學(xué)者相繼開發(fā)了 MYCIN(血液傳染病診斷和抗菌素處方,1971~1977),XCON(計算機(jī)硬件組合系統(tǒng))等。不過早期的專家系統(tǒng)規(guī)模都較小,難以實用。 直到 1997 年 5 月 IBM 的深藍(lán)(deepblue)國際象棋程序打敗世界冠軍卡斯帕諾夫(Kasparov),符號 AI 才真正解決大規(guī)模復(fù)雜系統(tǒng)的開發(fā)問題。費根堡姆和雷蒂(R. Raddy)作為設(shè)計與構(gòu)造大型人工智能系統(tǒng)的先驅(qū),共同獲得 1994 年 ACM 圖靈獎。 符號 AI 同樣可以應(yīng)用于機(jī)器學(xué)習(xí),把「機(jī)器學(xué)習(xí)」看成是基于知識的(歸納)推理。下面以歸納邏輯編程(inductivelogicprogramming,ILP)為例說明符號 AI 的學(xué)習(xí)機(jī)制。在 ILP 中正負(fù)樣本(具體示例)、背景知識和學(xué)習(xí)結(jié)果(假設(shè))都以一階邏輯子句(程序)形式表示。學(xué)習(xí)過程是在假設(shè)空間中尋找一個假設(shè),這個假設(shè)應(yīng)盡可能多地包含正例,盡量不包含負(fù)例,而且要與背景知識一致。一般情況下假設(shè)空間很大,學(xué)習(xí)十分困難,不過有了背景知識之后,就可以極大地限制假設(shè)空間,使學(xué)習(xí)變成可行。顯然,背景知識越多,學(xué)習(xí)速度越快,效果也越好。 為解決不確定問題,近年來,發(fā)展了概率歸納邏輯編程方法(probabilisticinductivelogicprogramming,PILP)。基于知識的學(xué)習(xí),由于有背景知識,可以實現(xiàn)小樣本學(xué)習(xí),而且也很容易推廣到不同的領(lǐng)域,學(xué)習(xí)的魯棒性也很強(qiáng)。以遷移學(xué)習(xí)(transferlearning)為例,可以將學(xué)習(xí)得到的模型從一種場景更新或者遷移到另一場景,實現(xiàn)跨領(lǐng)域和跨任務(wù)的推廣。 具體做法如下,首先,從學(xué)習(xí)訓(xùn)練的環(huán)境(包括訓(xùn)練數(shù)據(jù)與方法)出發(fā),發(fā)現(xiàn)哪些(即具有某種通用性)知識可以跨域或者跨任務(wù)進(jìn)行遷移,哪些只是針對單個域或單個任務(wù)的特定知識,并利用通用知識幫助提升目標(biāo)域或目標(biāo)任務(wù)的性能。這些通用知識主要通過以下 4 種渠道遷移到目標(biāo)域中去,即源域中可利用的實例,源域和目標(biāo)域中可共享的特征,源域模型可利用的部分,源域中實體之間的特定規(guī)則。可見,知識在遷移學(xué)習(xí)中起關(guān)鍵的作用,因此,符號 AI 易于跨領(lǐng)域和跨任務(wù)推廣。 在創(chuàng)建符號 AI 中做出重大貢獻(xiàn)的學(xué)者中,除費根堡姆和雷蒂(1994)之外,還有明斯基(1969),麥卡錫(1971),紐威爾和西蒙(1975)共 6 位先后獲得圖靈獎(括號中的數(shù)字表示獲獎的年份)。總之,第一代 AI 的成功來自于以下 3 個基本要素。以深藍(lán)程序為例,第 1 是知識與經(jīng)驗,「深藍(lán)」從象棋大師已經(jīng)下過的 70 萬盤棋局和大量 5~6 個棋子的殘局中,總結(jié)出下棋的規(guī)則。另外,在象棋大師與深藍(lán)對弈的過程中,通過調(diào)試「評價函數(shù)」中的 6000 個參數(shù),把大師的經(jīng)驗引進(jìn)程序。第 2 是算法,深藍(lán)采用α?β剪枝算法,有效提高搜索效率。第 3 是算力(計算能力),為了達(dá)到實時的要求,深藍(lán)使用 IBM RS/6000 SP2, 11.38 G FLOPS(浮點運算 / 秒),每秒可檢查 2 億步,或 3 分鐘運行 5 千萬盤棋局(positions)。 符號 AI 有堅實的認(rèn)知心理學(xué)基礎(chǔ),把符號系統(tǒng)作為人類高級心智活動的模型,其優(yōu)勢是,由于符號具有可組合性(compositionality),可從簡單的原子符號組合成復(fù)雜的符號串。每個符號都對應(yīng)著一定的語義,客觀上反映了語義對象的可組合性,比如,由簡單部件組合成整體等,可組合性是推理的基礎(chǔ),因此符號 AI 與人類理性智能一樣具有可解釋性和容易理解。符號 AI 也存在明顯的局限性,目前已有的方法只能解決完全信息和結(jié)構(gòu)化環(huán)境下的確定性問題,其中最具代表性的成果是 IBM「深藍(lán)」國際象棋程序,它只是在完全信息博弈(決策)中戰(zhàn)勝人類,這是博弈中最簡單的情況。而人類的認(rèn)知行為(cognitivebehavior),如決策等都是在信息不完全和非結(jié)構(gòu)化環(huán)境下完成的,符號 AI 距離解決這類問題還很遠(yuǎn)。 以自然語言形式表示(離散符號)的人類知識,計算機(jī)難以處理,必須尋找計算機(jī)易于處理的表示形式,這就是知識表示問題。我們已有的知識表示方法,如產(chǎn)生式規(guī)則(productionrules),邏輯程序(logicprogram)等,雖然計算機(jī)易于處理(如推理等),但都較簡單,表現(xiàn)能力有限,難以刻畫復(fù)雜和不確定的知識,推理也只限于邏輯推理等確定性的推理方法。更加復(fù)雜的知識表示與推理形式都在探討之中,如知識圖譜(knowledgegraph)、概率推理等。符號 AI 缺乏數(shù)學(xué)基礎(chǔ),除數(shù)理邏輯之外,其他數(shù)學(xué)工具很難使用,這也是符號 AI 難以在計算機(jī)上高效執(zhí)行的重要原因。 基于知識驅(qū)動的強(qiáng) AI 只能就事論事地解決特定問題,有沒有廣泛適用的弱方法,即通用 AI,目前還是一個值得探討的問題。此外,從原始數(shù)據(jù)(包括文本、圖像、語音和視頻)中獲取知識目前主要靠人工,效率很低,需要探索有效的自動獲取方法。此外,真正的智能系統(tǒng)需要常識,常識如何獲取、表達(dá)和推理還是一個有待解決的問題。常識的數(shù)量巨大,構(gòu)造一個實用的常識庫,無異于一項 AI 的「曼哈頓工程」,費時費力。
2.第二代人工智能
感官信息(視覺、聽覺和觸覺等)是如何存儲在記憶中并影響人類行為的? 有兩種基本觀點,一種觀點是,這些信息以某種編碼的方式表示在(記憶)神經(jīng)網(wǎng)絡(luò)中,符號 AI 屬于這一學(xué)派。另一種觀點是,感官的刺激并不存儲在記憶中,而是在神經(jīng)網(wǎng)絡(luò)中建立起「刺激–響應(yīng)」的連接(通道),通過這個「連接」保證智能行為的產(chǎn)生,這是連接主義的主張,連接主義 AI 就是建立在這個主張之上。
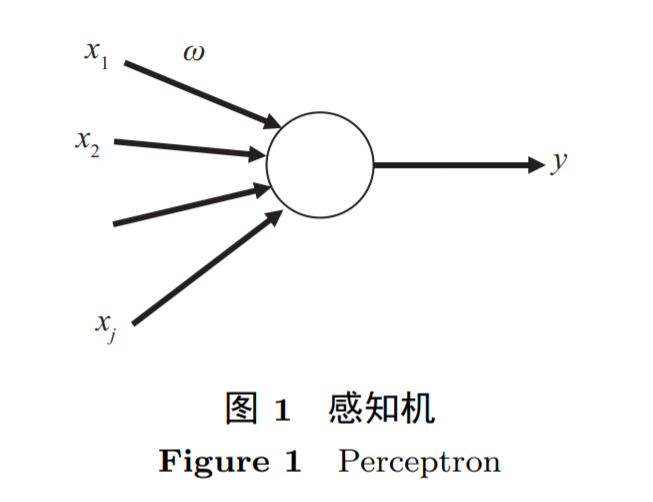
1958 年羅森布拉特(Rosenblatt)按照連接主義的思路,建立一個人工神經(jīng)網(wǎng)絡(luò)(artificialneuralnetwork,ANN)的雛形——感知機(jī)(perceptron)。感知機(jī)的靈感來自于兩個方面,一是 1943 年麥卡洛克(McCulloch)和皮特(Pitts)提出的神經(jīng)元數(shù)學(xué)模型——「閾值邏輯」線路,它將神經(jīng)元的輸入轉(zhuǎn)換成離散值,通常稱為 M-P 模型。二是來自于 1949 年赫布(D. O. Hebb)提出的 Hebb 學(xué)習(xí)率,即「同時發(fā)放的神經(jīng)元連接在一起」。感知機(jī)如圖 1 所示。

其中 b 為閾值,w 為權(quán)值。
AI 的創(chuàng)建者從一開始就關(guān)注連接主義的思路。1955 年麥卡錫等在達(dá)特茅斯(Dartmouth)AI 研究建議中寫道「如何安排一組(假想的)神經(jīng)元使之形成概念 ······ 已經(jīng)獲得部分的結(jié)果,但問題是需要更多的理論工作」,并把它列為會議的研討內(nèi)容之一。由感知機(jī)組成的 ANN 只有一個隱蔽層,過于簡單。明斯基等 于 1969 年出版的書《感知機(jī)》中指出,感知機(jī)只能解決線性可分問題,而且即使增加隱層的數(shù)量,由于沒有有效的學(xué)習(xí)算法,感知機(jī)也很難實用。明斯基對感知機(jī)的批評是致命的,使剛剛起步的連接主義 AI 跌入低谷達(dá) 10 多年之久。在困難的時期里,在許多學(xué)者的共同努力下,30 多年來無論在神經(jīng)網(wǎng)絡(luò)模型還是學(xué)習(xí)算法上均取得重大進(jìn)步,逐步形成了深度學(xué)習(xí)的成熟理論與技術(shù)。
其中重要的進(jìn)展有,第 1,梯度下降法(gradientdescent),這本來是一個古老的算法,法國數(shù)學(xué)家柯西(Cauchy)早在 1847 年就已經(jīng)提出; 到 1983 年俄國數(shù)學(xué)家尤里 · 涅斯捷諾夫(YuriiNesterov)做了改進(jìn),提出了加強(qiáng)版,使它更加好用。第 2,反向傳播(backpropagation,BP)算法,這是為 ANN 量身定制的,1970 年由芬蘭學(xué)生 SeppoLinnainmaa 在他的碩士論文中首先提出; 1986 年魯梅哈特(D.E.Rumelhart)和辛頓(G.Hinton)等做了系統(tǒng)的分析與肯定 。「梯度下降」和「BP」兩個算法為 ANN 的學(xué)習(xí)訓(xùn)練注入新的動力,它們和「閾值邏輯」、「Hebb 學(xué)習(xí)率」一起構(gòu)成 ANN 的 4 大支柱。
除 4 大支柱之外,還有一系列重要工作,其中包括更好的損失函數(shù),如交叉熵?fù)p失函數(shù)(cross-entropycostfunction); 算法的改進(jìn),如防止過擬合的正則化方法(regularization); 新的網(wǎng)絡(luò)形式,如 1980 年日本福島邦彥(Fukushima)的卷積神經(jīng)網(wǎng)絡(luò)(convolutionneuralnetworks,CNN),遞歸神經(jīng)網(wǎng)絡(luò)(recurrentneuralnetworks,RNN),長短程記憶神經(jīng)網(wǎng)絡(luò)(longshort-termmemoryneuralnetworks,LSTM),辛頓的深度信念網(wǎng)絡(luò)(deepbeliefnets,DBN)等。這些工作共同開啟了以深度學(xué)習(xí)(deeplearning)為基礎(chǔ)的第二代 AI 的新紀(jì)元。
第二代 AI 的學(xué)習(xí)理論有堅實的數(shù)學(xué)基礎(chǔ),為了說明這個基礎(chǔ),下面舉一個簡單的有監(jiān)督學(xué)習(xí)的例子,有監(jiān)督學(xué)習(xí)可以形式化為以下的函數(shù)回歸問題: 從數(shù)據(jù)庫 D 中提取樣本

,對樣本所反映的輸入–輸出關(guān)系 f:X→Y 做出估計,即從備選函數(shù)族(假設(shè)空間)F={fθ:X?→Y;θ∈A}中選出一個函數(shù) f^?使它平均逼近于真實 f。在深度學(xué)習(xí)中這個備選函數(shù)族由深度神經(jīng)網(wǎng)絡(luò)表示:

參數(shù)學(xué)習(xí)中有 3 項基本假設(shè)。(1)獨立性假設(shè): 損失函數(shù)和備選函數(shù)族 F(或者神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu))的選擇與數(shù)據(jù)無關(guān)。(2)大容量假設(shè): 樣本(x_i,y_i)數(shù)量巨大(n→∞)。(3)完備性假設(shè): 訓(xùn)練樣本完備且無噪聲。
如果上述假設(shè)均能滿足,f^?將隨樣本數(shù)的增加最后收斂于真實函數(shù) f。由此可見,如果擁有一定質(zhì)量的大數(shù)據(jù),由于深度神經(jīng)網(wǎng)絡(luò)的通用性(universality),它可以逼近任意的函數(shù),因此利用深度學(xué)習(xí)找到數(shù)據(jù)背后的函數(shù)具有理論的保證。這個論斷在許多實際應(yīng)用中得到了印證,比如,在標(biāo)準(zhǔn)圖像庫 ImageNet(2 萬類別,1 千 4 百萬張圖片)上的機(jī)器識別性能,2011 年誤識率高達(dá) 50%,到 2015 年微軟公司利用深度學(xué)習(xí)方法,誤識率大幅度地降到 3.57%,比人類的誤識率 5.1% 還要低。低噪聲背景下的語音識別率,2001 年之前基本上停留在 80% 左右,到了 2017 年識別率達(dá)到 95% 以上,滿足商品化的要求。
2016 年 3 月谷歌圍棋程序 AlphaGo 打敗世界冠軍李世石,是第二代 AI 巔峰之作,因為在 2015 年之前計算機(jī)圍棋程序最高只達(dá)到業(yè)余五段!更加令人驚奇的是,這些超越人類性能成果的取得,并不需要領(lǐng)域知識的幫助,只需輸入圖像原始像素、語音原始波形和圍棋棋盤的布局(圖像)!
深度學(xué)習(xí)的成功來自于以下 3 個要素:一是數(shù)據(jù),以 AlphaGo 為例,其中 AlphaGo-Zero 通過強(qiáng)化學(xué)習(xí)自學(xué)了億級的棋局,而人類在千年的圍棋史中,下過的有效棋局只不過 3000 萬盤。二是算法,包括蒙特卡洛樹搜索(Monte-Carlotreesearch)、深度學(xué)習(xí)和強(qiáng)化學(xué)習(xí)(reinforcementlearning) 等。三是算力,運行 AlphaGo 的機(jī)器是由 1920 個 CPU 和 280 個 GPU 組成的分布系統(tǒng)。因此第二代 AI 又稱數(shù)據(jù)驅(qū)動方法。
在創(chuàng)建第二代 AI 中做出重大貢獻(xiàn)的學(xué)者中,有以下 5 位獲得圖靈獎。他們是菲麗恩特(L. G. Valiant,2010)、珀爾(J. Pearl,2011)、本杰奧(Y. Bengio,2018)、辛頓(G. Hinton,2018)、楊立昆(Y. LeCun,2018)等。
早在 2014 年,深度學(xué)習(xí)的諸多缺陷不斷地被發(fā)現(xiàn),預(yù)示著這條道路遇到了瓶頸。下面僅以基于深度學(xué)習(xí)的圖像識別的一個例子說明這個問題(材料引自本團(tuán)隊的工作)。文獻(xiàn) 表示利用基于動量的迭代快速梯度符號法(momentumiterativefastgradientsignmethod,MI-FGSM)對 Inceptionv3 深度網(wǎng)絡(luò)模型實施攻擊的結(jié)果。無噪聲的原始圖像——阿爾卑斯山(Alps),模型以 94.39% 的置信度得到正確的分類。利用 MI-FGSM 方法經(jīng) 10 次迭代之后生成攻擊噪聲,將此攻擊噪聲加進(jìn)原圖像后得到攻擊樣本。由于加入的噪聲很小,生成的攻擊樣本與原始圖幾乎沒有差異,人類無法察覺,但 Inceptionv3 模型卻以 99.99% 的置信度識別為「狗」。
深度學(xué)習(xí)為何如此脆弱,這樣容易受攻擊,被欺騙和不安全,原因只能從機(jī)器學(xué)習(xí)理論本身去尋找。機(jī)器學(xué)習(xí)的成功與否與 3 項假設(shè)密切相關(guān),由于觀察與測量數(shù)據(jù)的不確定性,所獲取的數(shù)據(jù)一定不完備和含有噪聲,這種情況下,神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)(備選函數(shù)族)的選擇極為重要,如果網(wǎng)絡(luò)過于簡單,則存在欠擬合(under-fitting)風(fēng)險,如果網(wǎng)絡(luò)結(jié)構(gòu)過于復(fù)雜,則出現(xiàn)過擬合(overfitting)現(xiàn)象。雖然通過各種正則化的手段,一定程度上可以降低過擬合的風(fēng)險,但是如果數(shù)據(jù)的質(zhì)量差,則必然會導(dǎo)致推廣能力的嚴(yán)重下降。
此外,深度學(xué)習(xí)的「黑箱」性質(zhì)是造成深度學(xué)習(xí)推廣能力差的另一個原因,以圖像識別為例,通過深度學(xué)習(xí)只能發(fā)現(xiàn)重復(fù)出現(xiàn)的局部片段(模式),很難發(fā)現(xiàn)具有語義的部件。文獻(xiàn)描述了利用深度網(wǎng)絡(luò)模型 VGG-16 對「鳥」原始圖像進(jìn)行分類,從該模型 pool5 層 147 號神經(jīng)元的響應(yīng)可以看出,該神經(jīng)元最強(qiáng)烈的響應(yīng)是「鳥」頭部的某個局部特征,機(jī)器正利用這個局部特征作為區(qū)分「鳥」的主要依據(jù),顯然它不是「鳥」的不變語義特征。因此對于語義完全不同的對抗樣本(人物、啤酒瓶和馬等),由于具有與「鳥」頭部相似的片段,VGG-16 模型 pool5 層 147 號神經(jīng)元同樣產(chǎn)生強(qiáng)烈的響應(yīng),于是機(jī)器就把這些對抗樣本錯誤地判斷為「鳥」。
3.第三代人工智能
第一代知識驅(qū)動的 AI,利用知識、算法和算力 3 個要素構(gòu)造 AI,第二代數(shù)據(jù)驅(qū)動的 AI,利用數(shù)據(jù)、算法與算力 3 個要素構(gòu)造 AI。由于第一、二代 AI 只是從一個側(cè)面模擬人類的智能行為,因此存在各自的局限性。為了建立一個全面反映人類智能的 AI,需要建立魯棒與可解釋的 AI 理論與方法,發(fā)展安全、可信、可靠與可擴(kuò)展的 AI 技術(shù),即第三代 AI。其發(fā)展的思路是,把第一代的知識驅(qū)動和第二代的數(shù)據(jù)驅(qū)動結(jié)合起來,通過同時利用知識、數(shù)據(jù)、算法和算力等 4 個要素,構(gòu)造更強(qiáng)大的 AI。目前存在雙空間模型與單一空間模型兩個方案。
3.1 雙空間模型
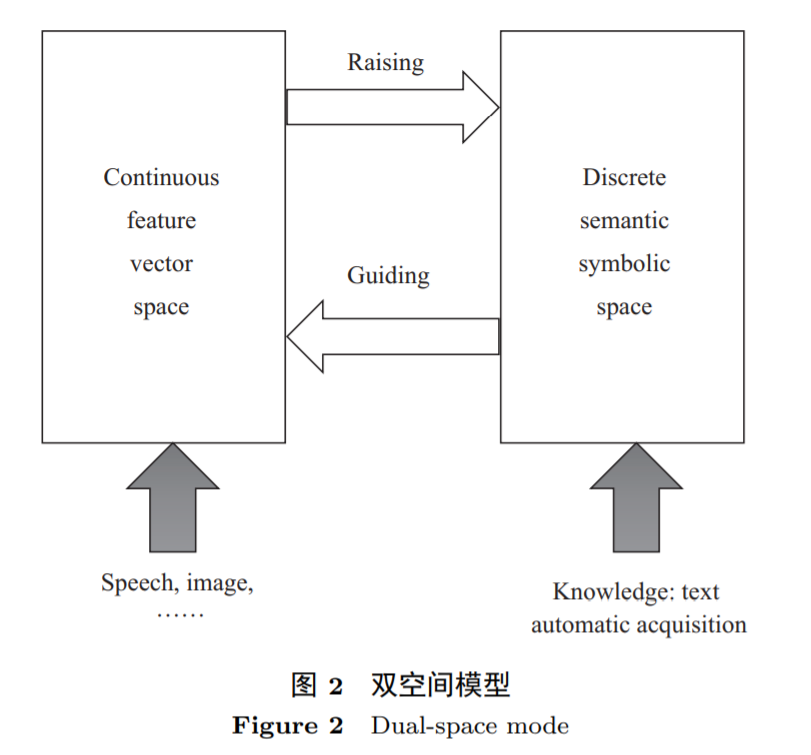
雙空間模型如圖 2 所示,它是一種類腦模型,符號空間模擬大腦的認(rèn)知行為,亞符號(向量)空間模擬大腦的感知行為。這兩層處理在大腦中是無縫融合的,如果能在計算機(jī)上實現(xiàn)這種融合,AI 就有可能達(dá)到與人類相似的智能,從根本上解決目前 AI 存在的不可解釋和魯棒性差的問題。為了實現(xiàn)這種目標(biāo),需要解決以下 3 個問題。
3.1.1 知識與推理
知識 (包括常識) 與推理是理性智能的基礎(chǔ), 在第一代 AI 中, 以物理符號系統(tǒng)模擬人類的理性 智能, 取得顯著的進(jìn)展, 但無論在知識表示還是推理方法上都有大量的問題需要進(jìn)一步探討。下面以 IBMDeepQA 項目為例說明最近的進(jìn)展, 之所以選擇這個例子是因為基于 DeepQA 構(gòu)成的 Watson 對話系統(tǒng), 在 2011 年 2 月美國電視 「危險邊緣」 智力競賽節(jié)目中, 以壓倒優(yōu)勢戰(zhàn)勝全美冠軍 K. 詹寧斯 (KenJennings) 和 B. 拉特 (BradRutter), 表明 Watson 是一個成功的 AI 系統(tǒng)。Watson 關(guān)于知識 表示和推理方法的以下經(jīng)驗值得借鑒: (1) 從大量非結(jié)構(gòu)化的文本自動生成結(jié)構(gòu)化知識表示的方法, (2) 基于知識質(zhì)量的評分表示知識不確定性的方法, (3) 基于多種推理的融合實現(xiàn)不確定性推理的方法。
Watson 系統(tǒng)將 「問答」(question-answer) 看成是基于知識的從 「問題」 到 「答案」 的推理, 為了達(dá) 到人類的答題水平, 計算機(jī)需要擁有與人類冠軍一樣甚至更多的知識。其中包括百科全書、主題詞表、 詞典、專線新聞報道、文學(xué)作品等互聯(lián)網(wǎng)上數(shù)量巨大 (相當(dāng)于 2 億頁的紙質(zhì)材料) 的文本, 這些文本是 非結(jié)構(gòu)化的, 而且質(zhì)量參差不齊, 需要把這些非結(jié)構(gòu)化的文本自動轉(zhuǎn)換為結(jié)構(gòu)化且易于處理的表達(dá)形 式。Watson 系統(tǒng)使用的表達(dá)形式為 「擴(kuò)展語料庫」(expendedcorpus) , 它的生成步驟如下。首先給出 基線語料庫 (baselinecorpus) 判別種子文件 (seeddocuments) , 根據(jù)種子文件從網(wǎng)上收集相關(guān)文件 并 并 從中挖掘 「文本核 」(textnuggets) , 對文本核做評分 按 按照評分結(jié)果集成為最后的 「擴(kuò)展語料庫」。
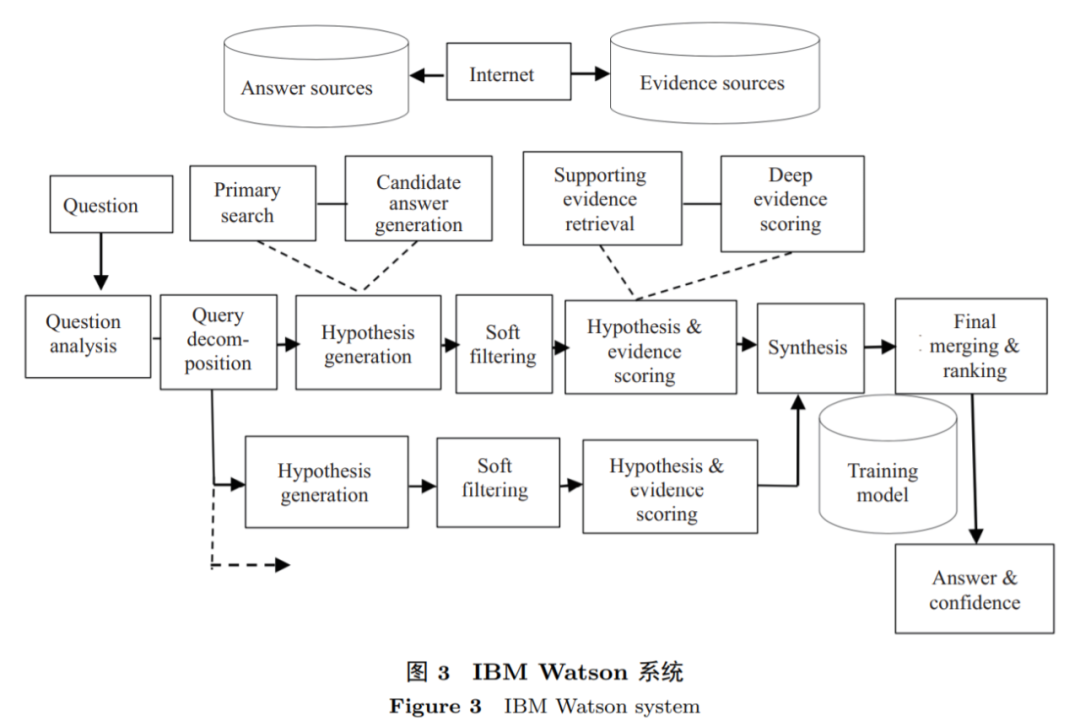
除自動生成的擴(kuò)展語料庫之外, Watson 的知識庫中還包括已有的語料庫, 如 dbPedia, WordNet, Yago 等, 以及人工編制的部分庫。Watson 采用多種推理機(jī)制 (多達(dá)百種) 將 「問題」 轉(zhuǎn)換為 「答案」(見圖 3)。先對 「問題」 做分析、分類和分解, 根據(jù)分解的結(jié)果從答案源 (語料庫) 中搜索假設(shè)與候選答 案, 經(jīng)初步過濾之后, 篩選出 100 個左右候選答案。再從證據(jù)源中收集證據(jù), 對候選答案進(jìn)行評分, 評 估過程同時考慮數(shù)據(jù)源的可靠性, 依據(jù)評分結(jié)果合成出幾種候選答案, 按照置信度大小進(jìn)行排序, 最后輸出排序后的答案。
此外,Watson 還通過 155 場與人類現(xiàn)場對決和 8000 次的實驗,學(xué)習(xí)對「問題」(自然語言)的理解。
3.1.2 感知
符號主義用符號系統(tǒng)作為人類心智的模型, 以實現(xiàn)與人類相似的推理能力。但從認(rèn)知的角度看, 二者卻有本質(zhì)上的不同, 即存在 「符號基礎(chǔ)問題」(symbolgroundingproblem)。在物理符號系統(tǒng)中, 客觀世界的 「對象」 和 「關(guān)系」 等用符號表示, 但符號本身并無語義, 我們只好人為地給它們規(guī)定語義, 也就是說是外部強(qiáng)加的 「寄生語義」(parasiticsemantics) , 機(jī)器本身并不知道。這與人類大腦中存在的 「內(nèi)在語義 」(intrinsicsemantics) 完全不同, 人類大腦中的 「內(nèi)在語義」, 特別是 「原子概念」 和 「常識」, 除極少數(shù)先天之外, 主要是通過感官 (視聽等) 或者感官與動作的結(jié)合自我習(xí)得的, 即將感官圖符式 (iconic) 表示或反映語義不變性的分類 (categorical) 表示轉(zhuǎn)化為符號表示。這本來是深度學(xué)習(xí)要完成的任務(wù), 但很可惜, 目前深度學(xué)習(xí)的模型并不能完成這項使命。
因為深度學(xué)習(xí)所處理的空間是特征空間, 與語義空間差別很大, 它只能學(xué)到?jīng)]有明確語義的 「局部片段」, 這些片段不具備可組合性, 因此不 能用來作為 「物體」 的 「內(nèi)在語義」 表示。換句話講, 目前的深度學(xué)習(xí)只能做到 「感覺」(sensation) , 達(dá)不到感知 為 為達(dá)到感知的水平 , 機(jī)器必須通過自我學(xué)習(xí)獲取 「物體」 的語義部件 (semanticparts) , 如 「狗」 的腿、頭、尾等,才有可能通過這些部件的組合形成 「狗」 的不變 「內(nèi)在語義」。解決這個問題的基本思路是利用知識為引導(dǎo),將感覺的信息從向量特征空間提升到符號語義空間,如圖 2 所示。這方面已經(jīng)有不少的研究工作 ,下面以本團(tuán)隊的工作闡述這方面工作的初步進(jìn)展。
文獻(xiàn) [40] 描述如何利用一個三元生成對抗網(wǎng)絡(luò) (triplegenerativeadversarialnetworks , Triple-GAN) 提高圖像分類性能的方法。三元生成對抗網(wǎng)絡(luò)由 3 部分組成: 分類器、生成器和鑒別器,分別用于條件化圖像生成和半監(jiān)督學(xué)習(xí)中的分類。生成器在給定真實標(biāo)簽的情況下生成偽數(shù)據(jù),分類器在給定真實數(shù)據(jù)的情況下生成偽標(biāo)簽,鑒別器的作用是區(qū)分?jǐn)?shù)據(jù)標(biāo)簽對是否來自真實標(biāo)記的數(shù)據(jù)集。如果設(shè)計好合適的效用函數(shù),利用三元生成對抗網(wǎng)絡(luò),可以通過無監(jiān)督(或弱監(jiān)督)學(xué)習(xí),讓生成器(網(wǎng)絡(luò))學(xué)到樣本中「物體」的表示(即先驗知識),同時利用這個先驗知識改善分類器的性能。
此項研究表明,通過 ANN 的無監(jiān)督學(xué)習(xí)可以學(xué)到「物體」的先驗知識,這就是「物體」(符號)的「內(nèi)在語義」。利用這個具有「內(nèi)在語義」的先驗知識提高分類器的識別率,從根本上解決計算機(jī)視覺中存在的「檢測」(where)與「識別」(what)之間的矛盾,實現(xiàn)小樣本學(xué)習(xí),提高魯棒性和推廣能力。
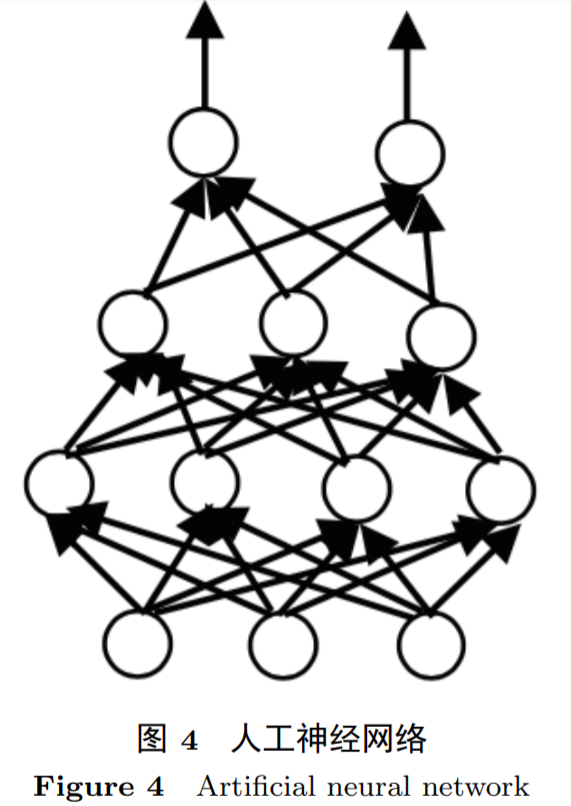
還可以從另外的角度思考,先回到深度學(xué)習(xí)所使用的人工神經(jīng)網(wǎng)絡(luò)(圖 4),以視覺為例,它與人類的視覺神經(jīng)網(wǎng)絡(luò)相比過于簡單了,既沒有反饋連接,同層之間的橫向連接和抑制連接,也沒有稀疏放電、記憶和注意等機(jī)制。如果我們能夠?qū)⑦@些機(jī)制引進(jìn) ANN,將會逐步提高計算機(jī)視覺的感知能力。由于我們對大腦視神經(jīng)網(wǎng)絡(luò)的工作原理了解得很少,目前只能沿著「腦啟發(fā)計算」(brianinspiredcomputing)的道路一步一步地往前探索。
目前有一些試探性的工作,有些效果但都不夠顯著。下面介紹本團(tuán)隊的一項研究。如文獻(xiàn) 所述,將稀疏放電的原理運用到 ANN 各層的計算中。網(wǎng)絡(luò)共 6 層,包括 Gabor 濾波和 Max 池化等,在各層的優(yōu)化計算中加上「稀疏」正則約束項,稀疏性的要求迫使 ANN 選擇最具代表性的特征。如果用背景簡單的「人類」「小汽車」「大象」和「鳥」等圖像作為訓(xùn)練樣本訓(xùn)練網(wǎng)絡(luò),那么神經(jīng)網(wǎng)絡(luò)的輸出層就會出現(xiàn)代表這些「類別」的神經(jīng)元,分別對人臉、小汽車、大象和鳥的輪廓做出響應(yīng),即提取了「整個物體」的語義信息,形成部分的「內(nèi)在語義」。
這種方法也只能提取部分的語義信息,還不能做到提取不同層面上的語義信息,如「整體」、「部件」和「子部件」等,達(dá)到符號化的水平,因此仍有許多工作有待研究。
3.1.3 強(qiáng)化學(xué)習(xí)
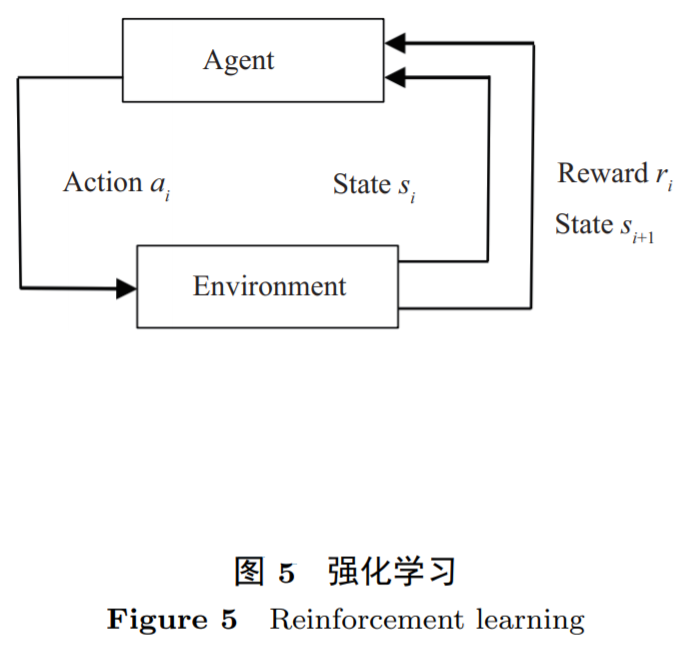
上面說過通過感官信息有可能學(xué)到一些基本知識(概念),不過僅僅依靠感官信息還不夠,比如「常識概念」,如「吃飯」「睡覺」等僅依靠感官難以獲取,只有通過與環(huán)境的交互,即親身經(jīng)驗之后才能獲得,這是人類最基本的學(xué)習(xí)行為,也是通往真正 AI 的重要道路。強(qiáng)化學(xué)習(xí)(reinforcementlearning)就是用來模擬人類的這種學(xué)習(xí)行為,它通過「交互–試錯」機(jī)制,與環(huán)境不斷進(jìn)行交互進(jìn)而學(xué)習(xí)到有效的策略,很大程度上反映了人腦做出決定的反饋系統(tǒng)運行機(jī)理,成為當(dāng)前人工智能突破的重要方法,在視頻游戲、棋牌游戲、機(jī)器人導(dǎo)航與控制、人機(jī)交互等領(lǐng)域取得了諸多成果,并在一些任務(wù)上接近甚至超越了人類的水平。
強(qiáng)化學(xué)習(xí)通常看成是離散時間的隨機(jī)控制過程,即智能體與環(huán)境的交互過程。智能體從起始狀態(tài) 出發(fā),取得起始觀察值
出發(fā),取得起始觀察值 ,在 t 時刻,智能體根據(jù)其內(nèi)部的推理機(jī)制采取行動
,在 t 時刻,智能體根據(jù)其內(nèi)部的推理機(jī)制采取行動 之后,獲得回報
之后,獲得回報 ,并轉(zhuǎn)移到下一個狀態(tài)
,并轉(zhuǎn)移到下一個狀態(tài) ,得到新的觀察
,得到新的觀察 。強(qiáng)化學(xué)習(xí)的目標(biāo)是,選擇策略π(s,a)使累計回報預(yù)期 V^π(s):S→R 最優(yōu)。如果我們考慮簡單的馬爾可夫(Markov)決策過程,即后一個狀態(tài)僅取決于前一個狀態(tài),并且環(huán)境完全可觀察,即觀察值 o 等于狀態(tài)值 s,即 O=S; 并假設(shè)策略穩(wěn)定不變。如圖 5 所示。以 AlphaZero 為例,智能體不依賴人類的標(biāo)注數(shù)據(jù),僅僅通過自我博弈式的環(huán)境交互積累數(shù)據(jù),實現(xiàn)自身策略的不斷改進(jìn),最終在圍棋任務(wù)上達(dá)到了超越人類頂級大師的水平,代表強(qiáng)化學(xué)習(xí)算法的一個巨大進(jìn)步。
?
?
。強(qiáng)化學(xué)習(xí)的目標(biāo)是,選擇策略π(s,a)使累計回報預(yù)期 V^π(s):S→R 最優(yōu)。如果我們考慮簡單的馬爾可夫(Markov)決策過程,即后一個狀態(tài)僅取決于前一個狀態(tài),并且環(huán)境完全可觀察,即觀察值 o 等于狀態(tài)值 s,即 O=S; 并假設(shè)策略穩(wěn)定不變。如圖 5 所示。以 AlphaZero 為例,智能體不依賴人類的標(biāo)注數(shù)據(jù),僅僅通過自我博弈式的環(huán)境交互積累數(shù)據(jù),實現(xiàn)自身策略的不斷改進(jìn),最終在圍棋任務(wù)上達(dá)到了超越人類頂級大師的水平,代表強(qiáng)化學(xué)習(xí)算法的一個巨大進(jìn)步。
?
?
出發(fā),取得起始觀察值,在 t 時刻,智能體根據(jù)其內(nèi)部的推理機(jī)制采取行動之后,獲得回報,并轉(zhuǎn)移到下一個狀態(tài),得到新的觀察。強(qiáng)化學(xué)習(xí)的目標(biāo)是,選擇策略π(s,a)使累計回報預(yù)期 V^π(s):S→R 最優(yōu)。如果我們考慮簡單的馬爾可夫(Markov)決策過程,即后一個狀態(tài)僅取決于前一個狀態(tài),并且環(huán)境完全可觀察,即觀察值 o 等于狀態(tài)值 s,即 O=S; 并假設(shè)策略穩(wěn)定不變。如圖 5 所示。以 AlphaZero 為例,智能體不依賴人類的標(biāo)注數(shù)據(jù),僅僅通過自我博弈式的環(huán)境交互積累數(shù)據(jù),實現(xiàn)自身策略的不斷改進(jìn),最終在圍棋任務(wù)上達(dá)到了超越人類頂級大師的水平,代表強(qiáng)化學(xué)習(xí)算法的一個巨大進(jìn)步。
?
?
強(qiáng)化學(xué)習(xí)算法在選擇行為策略的過程中,需要考慮環(huán)境模型的不確定性和目標(biāo)的長遠(yuǎn)性。具體的,通過值函數(shù)也就是未來累積獎勵的期望衡量不同策略的性能,即

其中γ∈[0,1]是折扣因子。值函數(shù)可以寫成貝爾曼方程(Bellmanequation)的形式。該方程表示了相鄰狀態(tài)之間的關(guān)系,可以利用其將決策過程劃分成多個不同的階段,其中某一階段的最優(yōu)決策問題可以利用貝爾曼方程轉(zhuǎn)化為下一階段最優(yōu)決策的子問題。
強(qiáng)化學(xué)習(xí)的核心目標(biāo)就是選擇最優(yōu)的策略,使得預(yù)期的累計獎勵最大,即值函數(shù)取得最優(yōu)值
需要指出的是,盡管強(qiáng)化學(xué)習(xí)在圍棋、視頻游戲等任務(wù)上獲得了極大的成功,但是這些任務(wù)從本質(zhì)上是相對「簡單」的,其任務(wù)的環(huán)境是完全可觀察的、反饋是確定的、狀態(tài)主要是離散的、規(guī)則是明確的,同時可以相對比較廉價地得到大量的數(shù)據(jù),這些都是目前人工智能算法所擅長的。但是在不確定性、不完全信息、數(shù)據(jù)或者知識匱乏的場景下,目前強(qiáng)化學(xué)習(xí)算法的性能往往會出現(xiàn)大幅度的下降,這也是目前強(qiáng)化學(xué)習(xí)所面臨的重要挑戰(zhàn)。其中的典型問題如下所述。
(1)部分觀測馬氏決策過程中強(qiáng)化學(xué)習(xí): 在真實的問題中,系統(tǒng)往往無法感知環(huán)境狀態(tài)的全部信息,因此不僅需要考慮動作的不確定性,同時也需要考慮狀態(tài)的不確定性。這就導(dǎo)致了部分感知的強(qiáng)化學(xué)習(xí)往往不滿足馬爾可夫環(huán)境假設(shè)。盡管相關(guān)的研究者近年來進(jìn)行了大量的探索,但是部分觀測馬氏決策(partiallyobservableMarkovdecisionprocess,POMDP)仍然是強(qiáng)化學(xué)習(xí)中比較有挑戰(zhàn)的問題。
(2)領(lǐng)域知識在強(qiáng)化學(xué)習(xí)中的融合機(jī)制: 如何實現(xiàn)領(lǐng)域知識的融合在強(qiáng)化學(xué)習(xí)中同樣是重要科學(xué)問題。對提高收斂速度、降低采樣復(fù)雜度、改善模型遷移性和算法魯棒性等具有重要意義。本團(tuán)隊針對這一問題,在領(lǐng)域知識指導(dǎo)的動作空間抽象壓縮、結(jié)構(gòu)設(shè)計等方面進(jìn)行了初步探索,但是如何實現(xiàn)領(lǐng)域知識和強(qiáng)化學(xué)習(xí)框架的高效融合仍然是亟待解決的問題。
(3)強(qiáng)化學(xué)習(xí)和博弈論的結(jié)合: 博弈論和強(qiáng)化學(xué)習(xí)的結(jié)合是近年來領(lǐng)域內(nèi)研究的熱點問題。二者的結(jié)合可以讓多智能體之間的競爭和合作關(guān)系的建模變得更加直觀和清晰,這其中包含了多智能體之間的零和 / 非零和、完全信息 / 非完全信息等多種不同的任務(wù)類型,尤其是在對抗性的任務(wù)中更具有研究和應(yīng)用價值。本團(tuán)隊前期在這方面也進(jìn)行了探索性的研究,將智能體對環(huán)境的探索建模成智能體和環(huán)境之間的博弈過程,也是目前第一個在擴(kuò)展型博弈、參數(shù)未知的場景下能夠從理論上保證收斂的算法。
除此之外,強(qiáng)化學(xué)習(xí)所面臨的難題還包括仿真環(huán)境和真實環(huán)境的差異、探索和利用的矛盾、基于模型的強(qiáng)化學(xué)習(xí)算法等諸多難點的問題,相比于監(jiān)督學(xué)習(xí)所獲得的成功而言,強(qiáng)化學(xué)習(xí)的研究還處于相對較為初級的階段。
3.2 單一空間模型
單一空間模型是以深度學(xué)習(xí)為基礎(chǔ),將所有的處理都放在亞符號(向量)空間,這顯然是為了利用計算機(jī)的計算能力,提高處理速度。問題在于深度學(xué)習(xí)與大腦的學(xué)習(xí)機(jī)制不同,在許多方面表現(xiàn)不佳,如可解釋性和魯棒性等。關(guān)鍵是要克服深度學(xué)習(xí)所帶來的缺陷,如圖 6 所示。下面討論幾個關(guān)鍵問題。
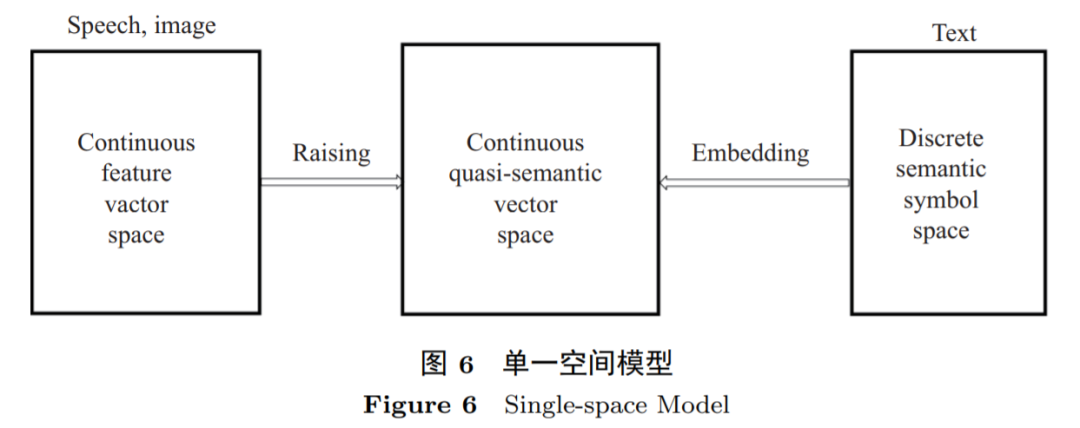
3.2.1 符號表示的向量化
知識通常以自然語言的離散符號形式表示,為了實現(xiàn)單一空間模型,首先要將符號表示的詞、短語、句子和篇章等轉(zhuǎn)換為向量,或者將知識圖譜轉(zhuǎn)換為向量表示。關(guān)鍵是「詞」的變換,即詞嵌入(wordembedding)。目前「詞嵌入」已有各種方法,如 Word2Vec[53]和 GloVe等。
下面介紹 Word2Vec 中采用的 Skip-gram[55]策略,用來說明詞是如何由符號轉(zhuǎn)換為向量的。
其中 w 是給定的目標(biāo)詞,c 是從其上下文中任選的一個詞,p(c|w;θ)是給定詞 w 下,詞 c 出現(xiàn)的概率。D 是從語料庫中提取的所有 w?c 對,θ是模型參數(shù),式(5)進(jìn)一步參數(shù)化后,得到

其中
是詞 c 和詞 w 的向量表示,C 是所有可用文本。參數(shù) ,i=1,2,...d,共 | C|×|W|×d 個。調(diào)整這些參數(shù)使式(5)最大化,最后得到所有詞 w∈W 的向量表示
,i=1,2,...d,共 | C|×|W|×d 個。調(diào)整這些參數(shù)使式(5)最大化,最后得到所有詞 w∈W 的向量表示
,i=1,2,...d,共 | C|×|W|×d 個。調(diào)整這些參數(shù)使式(5)最大化,最后得到所有詞 w∈W 的向量表示
。
這些詞向量具有以下良好的性質(zhì),即「語義相似的詞,其詞向量也很相似」(見圖 7)。變換后的詞向量之所以具有上述良好的性質(zhì),出自嵌入過程的以下假設(shè),兩個詞在上下文中同現(xiàn)的頻率越高,這兩個詞的語義越可能接近,或者越可能存在語義上的某種關(guān)聯(lián)。嵌入詞向量的這些特性,表明它帶有語義信息,因此稱嵌入空間為準(zhǔn)語義空間。式(5)是難計算的,可以采用深度神經(jīng)網(wǎng)絡(luò)等做近似計算。利用類似的嵌入法也可以把「短語」「句子」和「篇章」或者知識圖譜等轉(zhuǎn)換到具有準(zhǔn)語義的向量空間中去。

向量形式的知識表示具有上述良好的性質(zhì),且可以與數(shù)據(jù)一樣,使用大量的數(shù)學(xué)工具,包括深度學(xué)習(xí)方法,因此被大量應(yīng)用于文本處理,如機(jī)器翻譯等,取得明顯的效果。下面以神經(jīng)機(jī)器翻譯(neuralmachinetranslation)為例予以說明。
神經(jīng)機(jī)器翻譯的基本思路是,給定源句子(比如中文) ,尋找目標(biāo)句(比如英文)
,尋找目標(biāo)句(比如英文) 。神經(jīng)翻譯的任務(wù)是,計算詞一級翻譯概率的乘積,
?
?
。神經(jīng)翻譯的任務(wù)是,計算詞一級翻譯概率的乘積,
?
?
,尋找目標(biāo)句(比如英文)。神經(jīng)翻譯的任務(wù)是,計算詞一級翻譯概率的乘積,
?
?
其中θ是一組模型參數(shù),

是部分翻譯結(jié)果。詞一級的翻譯概率可用 softmax 函數(shù) f(·)定義:
 ?
其中
?
其中 是目標(biāo)句中第 j 個詞的向量表示,v_x 是源句子的向量表示,
是目標(biāo)句中第 j 個詞的向量表示,v_x 是源句子的向量表示, 是部分翻譯句的向量表示,y=y_j,j=1,2...,J 是要找的目標(biāo)句。
?
神經(jīng)翻譯模型的構(gòu)造: 給定訓(xùn)練樣本為一組「源句–目標(biāo)句」對
是部分翻譯句的向量表示,y=y_j,j=1,2...,J 是要找的目標(biāo)句。
?
神經(jīng)翻譯模型的構(gòu)造: 給定訓(xùn)練樣本為一組「源句–目標(biāo)句」對
?
其中是目標(biāo)句中第 j 個詞的向量表示,v_x 是源句子的向量表示,是部分翻譯句的向量表示,y=y_j,j=1,2...,J 是要找的目標(biāo)句。
?
神經(jīng)翻譯模型的構(gòu)造: 給定訓(xùn)練樣本為一組「源句–目標(biāo)句」對
,模型訓(xùn)練的目標(biāo)是最大化 log 似然:

即選擇一組模型參數(shù)θ,使目標(biāo)函數(shù)最大化。利用這個模型,通過式(7)計算(翻譯)目標(biāo)句子。這種翻譯方法盡管可以得到比傳統(tǒng)方法錯誤率還低的翻譯結(jié)果,但它具有深度學(xué)習(xí)方法的共性缺陷,如不可解釋、會發(fā)生重大錯誤、魯棒性差等。為克服這些缺陷,需要加入知識,通過先驗知識或后驗正則化等方式引入語言知識等。
3.2.2 深度學(xué)習(xí)方法的改進(jìn)
基于深度學(xué)習(xí)的 AI 具有不可解釋和魯棒性差等缺陷,目前有許多改進(jìn)工作。下面介紹本團(tuán)隊的一些工作。
(1)可解釋性問題。可解釋人工智能算法的研究近年來引起眾多研究人員的關(guān)注。而人類理解機(jī)器決策過程的核心難點是跨越數(shù)據(jù)特征空間和人類語義空間之間的鴻溝。無論是早期的以手工特征為基礎(chǔ)的算法,還是當(dāng)前以特征學(xué)習(xí)為代表的深度學(xué)習(xí),其核心思想都是將觀測樣本映射到特征空間中,進(jìn)而在特征空間進(jìn)行分析,發(fā)現(xiàn)樣本在特征空間不同區(qū)域內(nèi)的規(guī)律,從而達(dá)到算法要實現(xiàn)的任務(wù)目標(biāo)(如分類、回歸等)。與之不同的是,人類的分析和決策是利用自身的背景知識,在語義空間當(dāng)中完成。但是數(shù)據(jù)特征空間和人類的語義空間在結(jié)構(gòu)和內(nèi)涵上存在顯著的區(qū)別,而可解釋人工智能的最終就是要在二者之間架起一座橋梁,進(jìn)而跨越二者之間的鴻溝。
總體而言,相關(guān)的研究主要分為(i)模型的后解釋技術(shù)(post-hocexplanation),也就是給定了人工智能的模型,通過可視化、交互技術(shù)等方式,分析給定模型的工作機(jī)理,為其決策結(jié)果尋找解釋途徑;(ii)可解釋模型,即通過發(fā)展新的網(wǎng)絡(luò)架構(gòu)、損失函數(shù)、訓(xùn)練方式等,發(fā)展具有內(nèi)在可解釋性的新型人工智能模型。從整體來說,兩類方法目前都在發(fā)展過程中,在可解釋性的研究中具有重要作用。
可視分析是人工智能算法可解釋的一種直觀的思路。既然深度學(xué)習(xí)是「黑箱」學(xué)習(xí)法,內(nèi)部的工作機(jī)理是不透明的,「不可解釋」,如果利用可視化,打開「黑箱」,一切不就清楚了嗎? 為了幫助機(jī)器學(xué)習(xí)專家更加理解卷積神經(jīng)網(wǎng)絡(luò)的工作機(jī)理,我們開發(fā)了 CNNVis 這一可視分析工具。CNNVis 旨在幫助專家更好地理解與診斷深度卷積神經(jīng)網(wǎng)絡(luò),作為一種混合可視化方法,綜合應(yīng)用了基于雙聚類技術(shù)的邊綁定方法,以及矩形布局算法、矩陣重排算法和有向無環(huán)圖布局算法等。作為可視化領(lǐng)域的首批深度學(xué)習(xí)可視分析工作,該工作在工業(yè)界和學(xué)術(shù)界都引起了廣泛關(guān)注。在此基礎(chǔ)上,為了分析復(fù)雜神經(jīng)網(wǎng)絡(luò)的訓(xùn)練過程,我們以深度生成模型(對抗生成網(wǎng)絡(luò)(generativeadversarialnetworks,GAN)和變分自編碼器(variationalauto-encoder,VAE))為例,研究了如何幫助機(jī)器學(xué)習(xí)專家診斷訓(xùn)練過程中出現(xiàn)的常見問題。
解釋模型的另外一個思路是利用部分統(tǒng)計分析的技巧,針對神經(jīng)網(wǎng)絡(luò)決策過程中的參數(shù)冗余性,對神經(jīng)網(wǎng)絡(luò)內(nèi)部最后決策起到關(guān)鍵作用的子成分進(jìn)行分析,得到復(fù)雜模型內(nèi)部對決策起到最關(guān)鍵作用的核心部分。為了更高效發(fā)掘子網(wǎng)絡(luò),我們借鑒了網(wǎng)絡(luò)剪枝(networkpruning)思路,提出一種普適的提取子網(wǎng)絡(luò)的方法,而無需對模型從頭進(jìn)行訓(xùn)練。具體來說,我們對網(wǎng)絡(luò)中每一層都附加一組控制門(controlgate)變量,在知識蒸餾(knowledgedistillation)準(zhǔn)則下優(yōu)化該組變量控制各層輸出通道,用以確定關(guān)鍵子網(wǎng)絡(luò)。具體來說,令 p(y | x;θ)為具有權(quán)重參數(shù)θ的原始模型對于單個樣本 X 所做出的預(yù)測概率。而我們想要提取參數(shù)為θ_s 的關(guān)鍵子網(wǎng)絡(luò),其預(yù)測輸出應(yīng)為 q(y | x;θ_s),應(yīng)該與原模型輸出結(jié)果在 Kullback-Leibler 散度度量下接近。因此總體最小化目標(biāo)函數(shù)為

其中?(θ_s)為稀疏正則項,即鼓勵模型通過盡量少的激活神經(jīng)元達(dá)到和原網(wǎng)絡(luò)相似的性能。通過對關(guān)鍵子網(wǎng)絡(luò)可視化分析,我們觀察到對于樣本特定子網(wǎng)絡(luò),各層控制門值表征形式隨著層級增高而展現(xiàn)出類別區(qū)分特性。實驗結(jié)果表明,對于類別特定子網(wǎng)絡(luò),其整體表征形式與類別語義之間有著密切聯(lián)系。
以上方法更多的關(guān)注是模型的后解釋,也就是給定一個深度學(xué)習(xí)模型「強(qiáng)行」尋求對其決策過程的解釋,而這種解釋是否符合神經(jīng)網(wǎng)絡(luò)的內(nèi)在機(jī)理仍然是需要討論的問題。由于深度學(xué)習(xí)模型的不可解釋性是由于機(jī)器推理的特征空間和人類可理解的空間存在著本質(zhì)的區(qū)別,因此深度學(xué)習(xí)要想實現(xiàn)可解釋性就需要把機(jī)器特征空間和人類的語義空間聯(lián)系起來。本團(tuán)隊也在此方面進(jìn)行了探索性研究,主要針對如何將人類的先驗知識融入到深度學(xué)習(xí)模型的訓(xùn)練中,使特征具有更加明確的語義內(nèi)涵,從而能夠做到?jīng)Q策的追溯。具體的,在圖文的聯(lián)合分析中,我們利用文本信息中抽取出來的人類可理解的主題信息指導(dǎo)神經(jīng)網(wǎng)絡(luò)的訓(xùn)練過程,并對文本和圖像 / 視頻數(shù)據(jù)進(jìn)行協(xié)同訓(xùn)練,引導(dǎo)神經(jīng)網(wǎng)絡(luò)訓(xùn)練得到人類可以理解的語義特征。具體的,我們通過在神經(jīng)網(wǎng)絡(luò)的目標(biāo)函數(shù)中引入可解釋的正則約束:

其中第 1 項是相關(guān)任務(wù)的損失函數(shù),第 2 項是可解釋正則約束。通過這種方法,可以在文本數(shù)據(jù)引導(dǎo)下,通過不同模態(tài)數(shù)據(jù)之間的信息互補(bǔ)性,利用可解釋正則約束,提升深度學(xué)習(xí)模型的可解釋性。
(2)魯棒性問題。由于對抗攻擊給深度學(xué)習(xí)模型帶來的潛在的惡意風(fēng)險,其攻擊不但精準(zhǔn)且?guī)в泻軓?qiáng)的傳遞性,給深度學(xué)習(xí)模型的實際應(yīng)用帶來了嚴(yán)重的安全隱患,迫切需要增強(qiáng)深度學(xué)習(xí)模型自身的安全性,發(fā)展相應(yīng)的深度學(xué)習(xí)防御算法,降低惡意攻擊帶來的潛在威脅。具體來說,目前的深度學(xué)習(xí)防御算法主要有兩類思路。
第 1 是基于樣本 / 模型輸入控制的對抗防御。這類方法的核心是在模型的訓(xùn)練或者使用階段,通過對訓(xùn)練樣本的去噪、增廣、對抗檢測等方法,降低對抗攻擊造成的危害。其中去噪器由于不改變模型自身的結(jié)構(gòu)和性質(zhì),具有「即插即用」的性質(zhì),引起了廣泛的關(guān)注。但是由于對抗噪聲的特殊屬性,其形成的干擾效應(yīng)往往可以隨著神經(jīng)網(wǎng)絡(luò)的加深逐步放大,因此在普通的高斯噪聲(Gaussiannoise)上具有良好濾除效果的自編碼器往往不能很好地濾除對抗噪聲。
針對這一問題,本團(tuán)隊提出了基于高層表示引導(dǎo)的去噪器(HGD),通過高層特征的約束使得對抗樣本與正常樣本引起目標(biāo)模型的上層神經(jīng)元響應(yīng)盡可能一致。將傳統(tǒng)像素級去噪網(wǎng)絡(luò) DAE(denoisingautoencoder)與 U-net 網(wǎng)絡(luò)結(jié)構(gòu)進(jìn)行結(jié)合,到負(fù)噪聲輸出 ,用對抗樣本加上負(fù)噪聲可以得到去噪圖片
,用對抗樣本加上負(fù)噪聲可以得到去噪圖片 ,即
,即 。研究表明該方法不僅去掉了一部分對抗擾動,還增加了一部分「反對抗擾動」,取得了非常好的防御效果,獲得「NIPS2017 對抗性攻防競賽」中對抗防御任務(wù)冠軍,以及 2018 年在拉斯維加斯(LasVegas)舉辦的 CAADCTF 對抗樣本邀請賽冠軍。
?
第 2 是基于模型增強(qiáng)的對抗防御。這類方法的核心是通過修改網(wǎng)絡(luò)的結(jié)構(gòu)、模型的激活函數(shù)、損失函數(shù)等,訓(xùn)練更加魯棒的深度學(xué)習(xí)模型,從而提高對對抗攻擊的防御能力。其中集成模型(ensemble)是近年來出現(xiàn)的一類典型的防御方法。針對經(jīng)典集成防御由于各個子模型的相似性導(dǎo)致防御性能下降的問題,本團(tuán)隊提出自適應(yīng)多樣性增強(qiáng)訓(xùn)練方法(adaptivediversitypromotingtraining,ADP)。相比于經(jīng)典集成模型,ADP 方法在訓(xùn)練函數(shù)中額外引入了多樣性正則項,鼓勵每個子模型在正確類別上決策一致,而在其他類別上預(yù)測不一致。由于其他類別包括所有潛在的對抗樣本的目標(biāo)類別,所以這種不一致性可以使得各個子模型難以被同時欺騙,從而增強(qiáng)集成模型的魯棒性。具體來講,在 ADP 方法中,為了保證每個子模型的最大預(yù)測都對應(yīng)于正確的類別,這種多樣性定義在每個子模型輸出的非最大預(yù)測上,當(dāng)不同子模型的非最大預(yù)測向量相互正交時,這種多樣性取得最大值。具體的,其訓(xùn)練的目標(biāo)函數(shù)為
?
?
。研究表明該方法不僅去掉了一部分對抗擾動,還增加了一部分「反對抗擾動」,取得了非常好的防御效果,獲得「NIPS2017 對抗性攻防競賽」中對抗防御任務(wù)冠軍,以及 2018 年在拉斯維加斯(LasVegas)舉辦的 CAADCTF 對抗樣本邀請賽冠軍。
?
第 2 是基于模型增強(qiáng)的對抗防御。這類方法的核心是通過修改網(wǎng)絡(luò)的結(jié)構(gòu)、模型的激活函數(shù)、損失函數(shù)等,訓(xùn)練更加魯棒的深度學(xué)習(xí)模型,從而提高對對抗攻擊的防御能力。其中集成模型(ensemble)是近年來出現(xiàn)的一類典型的防御方法。針對經(jīng)典集成防御由于各個子模型的相似性導(dǎo)致防御性能下降的問題,本團(tuán)隊提出自適應(yīng)多樣性增強(qiáng)訓(xùn)練方法(adaptivediversitypromotingtraining,ADP)。相比于經(jīng)典集成模型,ADP 方法在訓(xùn)練函數(shù)中額外引入了多樣性正則項,鼓勵每個子模型在正確類別上決策一致,而在其他類別上預(yù)測不一致。由于其他類別包括所有潛在的對抗樣本的目標(biāo)類別,所以這種不一致性可以使得各個子模型難以被同時欺騙,從而增強(qiáng)集成模型的魯棒性。具體來講,在 ADP 方法中,為了保證每個子模型的最大預(yù)測都對應(yīng)于正確的類別,這種多樣性定義在每個子模型輸出的非最大預(yù)測上,當(dāng)不同子模型的非最大預(yù)測向量相互正交時,這種多樣性取得最大值。具體的,其訓(xùn)練的目標(biāo)函數(shù)為
?
?
,用對抗樣本加上負(fù)噪聲可以得到去噪圖片,即。研究表明該方法不僅去掉了一部分對抗擾動,還增加了一部分「反對抗擾動」,取得了非常好的防御效果,獲得「NIPS2017 對抗性攻防競賽」中對抗防御任務(wù)冠軍,以及 2018 年在拉斯維加斯(LasVegas)舉辦的 CAADCTF 對抗樣本邀請賽冠軍。
?
第 2 是基于模型增強(qiáng)的對抗防御。這類方法的核心是通過修改網(wǎng)絡(luò)的結(jié)構(gòu)、模型的激活函數(shù)、損失函數(shù)等,訓(xùn)練更加魯棒的深度學(xué)習(xí)模型,從而提高對對抗攻擊的防御能力。其中集成模型(ensemble)是近年來出現(xiàn)的一類典型的防御方法。針對經(jīng)典集成防御由于各個子模型的相似性導(dǎo)致防御性能下降的問題,本團(tuán)隊提出自適應(yīng)多樣性增強(qiáng)訓(xùn)練方法(adaptivediversitypromotingtraining,ADP)。相比于經(jīng)典集成模型,ADP 方法在訓(xùn)練函數(shù)中額外引入了多樣性正則項,鼓勵每個子模型在正確類別上決策一致,而在其他類別上預(yù)測不一致。由于其他類別包括所有潛在的對抗樣本的目標(biāo)類別,所以這種不一致性可以使得各個子模型難以被同時欺騙,從而增強(qiáng)集成模型的魯棒性。具體來講,在 ADP 方法中,為了保證每個子模型的最大預(yù)測都對應(yīng)于正確的類別,這種多樣性定義在每個子模型輸出的非最大預(yù)測上,當(dāng)不同子模型的非最大預(yù)測向量相互正交時,這種多樣性取得最大值。具體的,其訓(xùn)練的目標(biāo)函數(shù)為
?
?

其中,

; 為每個子模型 k 的交叉熵(cross-entropy)損失函數(shù)。ADP_α,β(x,y)=α·H(F)+β·log(ED)是模型集成多樣性的度量,鼓勵不同的子模型形成盡量差異化的決策邊界。實驗結(jié)果表明,通過鼓勵不同子模型的差異化決策性質(zhì),有效地提升了模型的對抗魯棒性。但是,總體而言,目前多數(shù)的對抗防御方法是基于經(jīng)驗主義的,研究表明很多防御對抗樣本的方法在很短的時間就會被后來的攻擊算法攻破。其重要原因之一是深度學(xué)習(xí)只是在做簡單的函數(shù)擬合,缺乏像人一樣對問題的理解能力。因此通過理解機(jī)器學(xué)習(xí)模型的內(nèi)部工作機(jī)理,發(fā)展數(shù)據(jù)驅(qū)動和知識驅(qū)動融合的第三代人工智能理論框架,將成為提高人工智能算法魯棒性的重要途徑。
?
但是,總體而言,目前多數(shù)的對抗防御方法是基于經(jīng)驗主義的,研究表明很多防御對抗樣本的方法在很短的時間就會被后來的攻擊算法攻破。其重要原因之一是深度學(xué)習(xí)只是在做簡單的函數(shù)擬合,缺乏像人一樣對問題的理解能力。因此通過理解機(jī)器學(xué)習(xí)模型的內(nèi)部工作機(jī)理,發(fā)展數(shù)據(jù)驅(qū)動和知識驅(qū)動融合的第三代人工智能理論框架,將成為提高人工智能算法魯棒性的重要途徑。
?
3.2.3 貝葉斯深度學(xué)習(xí)
?
如圖 6 所示,圖像和語音等信息是在特征空間中處理的,這些特征語義信息很少,需要提取含有更多語義的特征,其中的一種解決辦法是將知識引入深度學(xué)習(xí)。下面以貝葉斯深度學(xué)習(xí)為例,說明這一思路。
?
我們前面說過深度神經(jīng)網(wǎng)絡(luò)沒有考慮數(shù)據(jù)觀測的不確定性,這種不確定性的存在,以及對于數(shù)據(jù)背后物理背景的無知,使我們對深度學(xué)習(xí)結(jié)果的正確性難以判斷。同時,在數(shù)據(jù)量有限但模型逐漸變大(如包括十億甚至千億參數(shù))的過程中,模型的不確定性也變得更嚴(yán)重——存在很多模型在訓(xùn)練集上表現(xiàn)都很好,但在測試集上的表現(xiàn)差別很大。貝葉斯學(xué)習(xí)充分考慮了先驗知識以及模型和數(shù)據(jù)的不確定性,而且還能從不斷提供的數(shù)據(jù)(證據(jù))中,加深對數(shù)據(jù)的了解,即根據(jù)新的證據(jù)實現(xiàn)增量式的學(xué)習(xí),充分發(fā)揮知識在學(xué)習(xí)中的作用。不僅可以對學(xué)習(xí)結(jié)果的可信度做出判斷,也因此提高了學(xué)習(xí)的效率和準(zhǔn)確度。
?
貝葉斯學(xué)習(xí)(Bayesianlearning)定義: 給定觀測數(shù)據(jù) d∈D,按貝葉斯規(guī)則計算每個假設(shè)的概率,
?
?
為每個子模型 k 的交叉熵(cross-entropy)損失函數(shù)。ADP_α,β(x,y)=α·H(F)+β·log(ED)是模型集成多樣性的度量,鼓勵不同的子模型形成盡量差異化的決策邊界。實驗結(jié)果表明,通過鼓勵不同子模型的差異化決策性質(zhì),有效地提升了模型的對抗魯棒性。但是,總體而言,目前多數(shù)的對抗防御方法是基于經(jīng)驗主義的,研究表明很多防御對抗樣本的方法在很短的時間就會被后來的攻擊算法攻破。其重要原因之一是深度學(xué)習(xí)只是在做簡單的函數(shù)擬合,缺乏像人一樣對問題的理解能力。因此通過理解機(jī)器學(xué)習(xí)模型的內(nèi)部工作機(jī)理,發(fā)展數(shù)據(jù)驅(qū)動和知識驅(qū)動融合的第三代人工智能理論框架,將成為提高人工智能算法魯棒性的重要途徑。
?
但是,總體而言,目前多數(shù)的對抗防御方法是基于經(jīng)驗主義的,研究表明很多防御對抗樣本的方法在很短的時間就會被后來的攻擊算法攻破。其重要原因之一是深度學(xué)習(xí)只是在做簡單的函數(shù)擬合,缺乏像人一樣對問題的理解能力。因此通過理解機(jī)器學(xué)習(xí)模型的內(nèi)部工作機(jī)理,發(fā)展數(shù)據(jù)驅(qū)動和知識驅(qū)動融合的第三代人工智能理論框架,將成為提高人工智能算法魯棒性的重要途徑。
?
3.2.3 貝葉斯深度學(xué)習(xí)
?
如圖 6 所示,圖像和語音等信息是在特征空間中處理的,這些特征語義信息很少,需要提取含有更多語義的特征,其中的一種解決辦法是將知識引入深度學(xué)習(xí)。下面以貝葉斯深度學(xué)習(xí)為例,說明這一思路。
?
我們前面說過深度神經(jīng)網(wǎng)絡(luò)沒有考慮數(shù)據(jù)觀測的不確定性,這種不確定性的存在,以及對于數(shù)據(jù)背后物理背景的無知,使我們對深度學(xué)習(xí)結(jié)果的正確性難以判斷。同時,在數(shù)據(jù)量有限但模型逐漸變大(如包括十億甚至千億參數(shù))的過程中,模型的不確定性也變得更嚴(yán)重——存在很多模型在訓(xùn)練集上表現(xiàn)都很好,但在測試集上的表現(xiàn)差別很大。貝葉斯學(xué)習(xí)充分考慮了先驗知識以及模型和數(shù)據(jù)的不確定性,而且還能從不斷提供的數(shù)據(jù)(證據(jù))中,加深對數(shù)據(jù)的了解,即根據(jù)新的證據(jù)實現(xiàn)增量式的學(xué)習(xí),充分發(fā)揮知識在學(xué)習(xí)中的作用。不僅可以對學(xué)習(xí)結(jié)果的可信度做出判斷,也因此提高了學(xué)習(xí)的效率和準(zhǔn)確度。
?
貝葉斯學(xué)習(xí)(Bayesianlearning)定義: 給定觀測數(shù)據(jù) d∈D,按貝葉斯規(guī)則計算每個假設(shè)的概率,
?
?
為每個子模型 k 的交叉熵(cross-entropy)損失函數(shù)。ADP_α,β(x,y)=α·H(F)+β·log(ED)是模型集成多樣性的度量,鼓勵不同的子模型形成盡量差異化的決策邊界。實驗結(jié)果表明,通過鼓勵不同子模型的差異化決策性質(zhì),有效地提升了模型的對抗魯棒性。但是,總體而言,目前多數(shù)的對抗防御方法是基于經(jīng)驗主義的,研究表明很多防御對抗樣本的方法在很短的時間就會被后來的攻擊算法攻破。其重要原因之一是深度學(xué)習(xí)只是在做簡單的函數(shù)擬合,缺乏像人一樣對問題的理解能力。因此通過理解機(jī)器學(xué)習(xí)模型的內(nèi)部工作機(jī)理,發(fā)展數(shù)據(jù)驅(qū)動和知識驅(qū)動融合的第三代人工智能理論框架,將成為提高人工智能算法魯棒性的重要途徑。
?
但是,總體而言,目前多數(shù)的對抗防御方法是基于經(jīng)驗主義的,研究表明很多防御對抗樣本的方法在很短的時間就會被后來的攻擊算法攻破。其重要原因之一是深度學(xué)習(xí)只是在做簡單的函數(shù)擬合,缺乏像人一樣對問題的理解能力。因此通過理解機(jī)器學(xué)習(xí)模型的內(nèi)部工作機(jī)理,發(fā)展數(shù)據(jù)驅(qū)動和知識驅(qū)動融合的第三代人工智能理論框架,將成為提高人工智能算法魯棒性的重要途徑。
?
3.2.3 貝葉斯深度學(xué)習(xí)
?
如圖 6 所示,圖像和語音等信息是在特征空間中處理的,這些特征語義信息很少,需要提取含有更多語義的特征,其中的一種解決辦法是將知識引入深度學(xué)習(xí)。下面以貝葉斯深度學(xué)習(xí)為例,說明這一思路。
?
我們前面說過深度神經(jīng)網(wǎng)絡(luò)沒有考慮數(shù)據(jù)觀測的不確定性,這種不確定性的存在,以及對于數(shù)據(jù)背后物理背景的無知,使我們對深度學(xué)習(xí)結(jié)果的正確性難以判斷。同時,在數(shù)據(jù)量有限但模型逐漸變大(如包括十億甚至千億參數(shù))的過程中,模型的不確定性也變得更嚴(yán)重——存在很多模型在訓(xùn)練集上表現(xiàn)都很好,但在測試集上的表現(xiàn)差別很大。貝葉斯學(xué)習(xí)充分考慮了先驗知識以及模型和數(shù)據(jù)的不確定性,而且還能從不斷提供的數(shù)據(jù)(證據(jù))中,加深對數(shù)據(jù)的了解,即根據(jù)新的證據(jù)實現(xiàn)增量式的學(xué)習(xí),充分發(fā)揮知識在學(xué)習(xí)中的作用。不僅可以對學(xué)習(xí)結(jié)果的可信度做出判斷,也因此提高了學(xué)習(xí)的效率和準(zhǔn)確度。
?
貝葉斯學(xué)習(xí)(Bayesianlearning)定義: 給定觀測數(shù)據(jù) d∈D,按貝葉斯規(guī)則計算每個假設(shè)的概率,
?
?

其中 D 是所有數(shù)據(jù)。給定 d

是對未知量 X 的預(yù)測,即通過觀測數(shù)據(jù)確定各個假設(shè)的概率,再從各個假設(shè)確定未知量 X 的分布。其中的關(guān)鍵是假設(shè)先驗 p(h_i)和給定假設(shè) h_i 下數(shù)據(jù) d 的似然 p(d|h_i)。貝葉斯預(yù)測(式(13))不管樣本量大小,均可達(dá)到最優(yōu),但當(dāng)假設(shè)空間很大時,式(13)的加法計算量太大(在連續(xù)情況下為積分),難以實際應(yīng)用。通常需要采用近似算法,主要有兩類近似方法——變分推斷和蒙特卡洛采樣[69]。另外,還有一些常見的簡化有,(1)對 X 的預(yù)測不是利用所有的假設(shè),而只利用其中讓 p(h_i|d)最大化的一個 h_i,稱為最大化后驗(maximumaposteriori,MAP)假設(shè)。(2)假定 p(h_i)是均勻分布,問題就簡化為,選擇一個讓 p(d|h_i)最大化的 hi,稱為最大化似然(maximumlikelihood,ML)假設(shè)。(3)如果不是所有數(shù)據(jù)都可以觀測,即存在隱變量,通常采用 EM(expectationmaximization)算法[70]。該算法分為兩步(式(14)),E 步: 利用觀測的數(shù)據(jù) x 和θ^(i),計算 p(Z=z|x;θ^(i));M 步: 利用計算出來的 z 和 x,計算模型參數(shù)θ^(i+1)。兩個步驟交替進(jìn)行,找到最終的模型參數(shù)θ:

貝葉斯準(zhǔn)則 (式 (12)) 是一個從先驗分布和似然函數(shù)推斷后驗分布的過程, 為了更靈活地考慮知識, 我 們團(tuán)隊提出了正則化貝葉斯 (regularized Bayesian inference, RegBayes) , 它基于貝葉斯定理的信息 論描述 , 通過引入后驗正則化, 在變分優(yōu)化的框架下可以靈活地考慮領(lǐng)域知識 (如基于邏輯表達(dá)式 的知識 ) 或者學(xué)習(xí)任務(wù)優(yōu)化的目標(biāo) (如最大間隔損失 ) 等。
更進(jìn)一步的, 貝葉斯深度學(xué)習(xí)是將貝葉斯學(xué)習(xí)的基本原理與深度神經(jīng)網(wǎng)絡(luò)的表示學(xué)習(xí)有機(jī)融合的 一類方法, 融合主要體現(xiàn)在兩個方面, (1) 用貝葉斯方法更好地學(xué)習(xí)深度神經(jīng)網(wǎng)絡(luò) (如貝葉斯神經(jīng)網(wǎng)絡(luò)、 高斯過程等), 包括計算預(yù)測的不確定性、避免過擬合等; (2) 用深度神經(jīng)網(wǎng)絡(luò)作為非線性函數(shù)變換定 義更加豐富靈活的貝葉斯模型, 如圖 8 所示, 包括深度生成模型 (如 GAN, VAE, 基于可逆變換的流模 型等). 其中第 1 種融合早在 20 世紀(jì) 90 年代就被霍普菲爾德 (J. Hopfield) 和辛頓指導(dǎo)博士生系統(tǒng)研究過 , 當(dāng)時的算力和數(shù)據(jù)都很有限, 稍微大一點的神經(jīng)網(wǎng)絡(luò)都面臨著嚴(yán)重的過擬合, 因此, 那時 候就開始研究用貝葉斯方法保護(hù)神經(jīng)網(wǎng)絡(luò), 并且選擇合適的網(wǎng)絡(luò)結(jié)構(gòu). 隨著神經(jīng)網(wǎng)絡(luò)的加深, 貝葉斯 方法又引起了很多研究興趣, 主要進(jìn)展包括對深度貝葉斯神經(jīng)網(wǎng)絡(luò)進(jìn)行高效的 (近似) 計算, 需要克服 的主要困難是深度網(wǎng)絡(luò)過參數(shù)化 (over-parametrization) 帶來的維數(shù)災(zāi)難. 在這方面, 我們團(tuán)隊進(jìn)行了 深入研究, 先后提出了隱式變分推斷 (implicit variational inference) 算法 , 在泛函空間進(jìn)行粒子 優(yōu)化的推斷算法 (functional variational inference) 等。
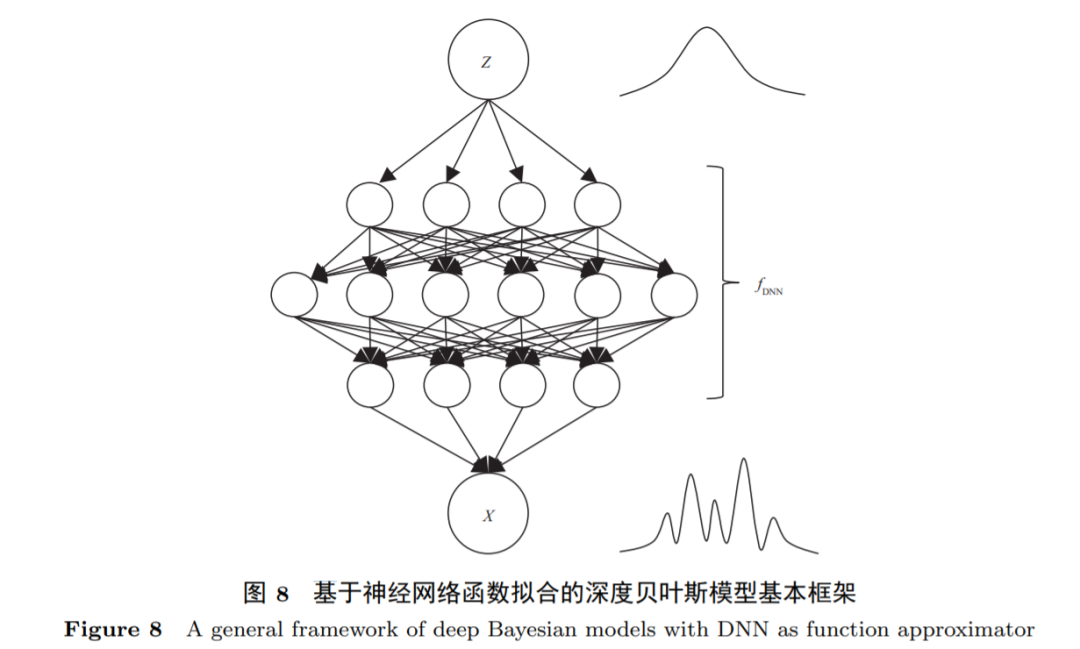
對于第 2 種融合, 我們知道一個簡單分布的隨機(jī)變量 z 經(jīng)過函數(shù) f 變化之后, 得到的變量 x = f(z), 具有更復(fù)雜的分布, 當(dāng) f 是一個雙射變換時, 我們可以得到 x 分布的解析形式
但是, 在處理復(fù)雜數(shù)據(jù)時, f 是未知的, 因此, 我們希望從數(shù)據(jù)中進(jìn)行學(xué)習(xí). 利用深度神經(jīng)網(wǎng)絡(luò)的強(qiáng)大擬合能 力, 我們將 f 定義成一個深度神經(jīng)網(wǎng)絡(luò), 通過一定的準(zhǔn)則學(xué)習(xí)最優(yōu)的 f_θ. 如圖 8 所示, 這種想法被證明是非常有效的, 已經(jīng)發(fā)展了包括 VAE, GAN 以及基于流的模型 (flow-based models), 即使在完全無 監(jiān)督訓(xùn)練下, 這些模型都可以產(chǎn)生高質(zhì)量的自然圖片或人臉等。
具體的, 這幾種模型的區(qū)別在于定義 x 的變化函數(shù), 在 VAE 中,
 ?
其中 ? 是一個噪聲變量 (如白噪聲對應(yīng)的標(biāo)準(zhǔn)高斯分布); 在 GAN 和基于流的模型中, 沒有顯式的噪聲變量。這種區(qū)別帶來了參數(shù)估計上的不同, VAE 和基于流的模型采用最大似然估計, 而 GAN 定義了對抗學(xué)習(xí)的目標(biāo)——「最大最小博弈」。同樣的, 這些模型雖然功能強(qiáng)大, 但是給推斷和學(xué)習(xí)也帶來了很多挑戰(zhàn)。例如, GAN 網(wǎng)絡(luò)的訓(xùn)練過程經(jīng)常是不穩(wěn)定的, 會遇到梯度消失或梯度爆炸等問題, 我們團(tuán)隊最新的成果利用控制論對這一問題進(jìn)行了分析研究, 提出了有效的反饋機(jī)制, 能夠讓 GAN 的訓(xùn)練更平穩(wěn)。此外, 基于可逆變換的流模型往往受限于維數(shù)的約束, 為此, 我們提出了自適應(yīng)數(shù)據(jù)增廣的流模型, 顯著提升這類模型的表達(dá)能力。
?
基于上述介紹, 能夠看出貝葉斯深度學(xué)習(xí)提供了一種強(qiáng)大的建模語言, 將不確定性建模和推斷與深度表示學(xué)習(xí)有機(jī)融合, 其關(guān)鍵挑戰(zhàn)在于推斷和學(xué)習(xí)算法。幸運的是, 近年來, 在算法方面取得了很多突破進(jìn)展 (如上所述)。同時, 也發(fā)展了性能良好的概率編程庫, 支持貝葉斯深度學(xué)習(xí)模型的開發(fā)和部 署。例如, 我們團(tuán)隊研制的「珠算」1) , 是最早的系統(tǒng)支持貝葉斯深度學(xué)習(xí)的開源庫之一。在應(yīng)用方面, 貝葉斯深度學(xué)習(xí)的方法已經(jīng)在時間序列預(yù)測、半監(jiān)督學(xué)習(xí)、無監(jiān)督學(xué)習(xí)、小樣本學(xué)習(xí)、持續(xù)學(xué)習(xí) 等復(fù)雜場景下, 取得良好的效果。
?
3.2.4 單一空間中的計算
?
如圖 6 所示, 我們要在單一的向量空間中, 對來自文本的嵌入向量和來自視聽覺的特征向量進(jìn)行 計算, 存在一定的難度. 因為文本中以符號表示的詞, 經(jīng)嵌入之后變成向量時損失了大量語義, 從視聽覺中提取的特征, 雖然我們盡量獲取更多的語義, 但一般情況多屬底層特征, 語義含量很少。
?
我們將以視覺問答為例介紹這方面的初步嘗試. 在視覺問答中既有圖像又有文本, 需要在單一的向量空間中同時處理, 涉及單一空間模型的使用。以本團(tuán)隊關(guān)于 「篇章級圖文問答」 研究工作為例予以說明 。如圖 9 所示, 根據(jù)給定的圖片, 回答以下問題, 「在大陸地殼下面有多少層 (類型)?」, 除問題以文本形式表示之外, 還有一個與圖片相關(guān)的篇章「板塊運動」。
?
?
?
其中 ? 是一個噪聲變量 (如白噪聲對應(yīng)的標(biāo)準(zhǔn)高斯分布); 在 GAN 和基于流的模型中, 沒有顯式的噪聲變量。這種區(qū)別帶來了參數(shù)估計上的不同, VAE 和基于流的模型采用最大似然估計, 而 GAN 定義了對抗學(xué)習(xí)的目標(biāo)——「最大最小博弈」。同樣的, 這些模型雖然功能強(qiáng)大, 但是給推斷和學(xué)習(xí)也帶來了很多挑戰(zhàn)。例如, GAN 網(wǎng)絡(luò)的訓(xùn)練過程經(jīng)常是不穩(wěn)定的, 會遇到梯度消失或梯度爆炸等問題, 我們團(tuán)隊最新的成果利用控制論對這一問題進(jìn)行了分析研究, 提出了有效的反饋機(jī)制, 能夠讓 GAN 的訓(xùn)練更平穩(wěn)。此外, 基于可逆變換的流模型往往受限于維數(shù)的約束, 為此, 我們提出了自適應(yīng)數(shù)據(jù)增廣的流模型, 顯著提升這類模型的表達(dá)能力。
?
基于上述介紹, 能夠看出貝葉斯深度學(xué)習(xí)提供了一種強(qiáng)大的建模語言, 將不確定性建模和推斷與深度表示學(xué)習(xí)有機(jī)融合, 其關(guān)鍵挑戰(zhàn)在于推斷和學(xué)習(xí)算法。幸運的是, 近年來, 在算法方面取得了很多突破進(jìn)展 (如上所述)。同時, 也發(fā)展了性能良好的概率編程庫, 支持貝葉斯深度學(xué)習(xí)模型的開發(fā)和部 署。例如, 我們團(tuán)隊研制的「珠算」1) , 是最早的系統(tǒng)支持貝葉斯深度學(xué)習(xí)的開源庫之一。在應(yīng)用方面, 貝葉斯深度學(xué)習(xí)的方法已經(jīng)在時間序列預(yù)測、半監(jiān)督學(xué)習(xí)、無監(jiān)督學(xué)習(xí)、小樣本學(xué)習(xí)、持續(xù)學(xué)習(xí) 等復(fù)雜場景下, 取得良好的效果。
?
3.2.4 單一空間中的計算
?
如圖 6 所示, 我們要在單一的向量空間中, 對來自文本的嵌入向量和來自視聽覺的特征向量進(jìn)行 計算, 存在一定的難度. 因為文本中以符號表示的詞, 經(jīng)嵌入之后變成向量時損失了大量語義, 從視聽覺中提取的特征, 雖然我們盡量獲取更多的語義, 但一般情況多屬底層特征, 語義含量很少。
?
我們將以視覺問答為例介紹這方面的初步嘗試. 在視覺問答中既有圖像又有文本, 需要在單一的向量空間中同時處理, 涉及單一空間模型的使用。以本團(tuán)隊關(guān)于 「篇章級圖文問答」 研究工作為例予以說明 。如圖 9 所示, 根據(jù)給定的圖片, 回答以下問題, 「在大陸地殼下面有多少層 (類型)?」, 除問題以文本形式表示之外, 還有一個與圖片相關(guān)的篇章「板塊運動」。
?
?
?
其中 ? 是一個噪聲變量 (如白噪聲對應(yīng)的標(biāo)準(zhǔn)高斯分布); 在 GAN 和基于流的模型中, 沒有顯式的噪聲變量。這種區(qū)別帶來了參數(shù)估計上的不同, VAE 和基于流的模型采用最大似然估計, 而 GAN 定義了對抗學(xué)習(xí)的目標(biāo)——「最大最小博弈」。同樣的, 這些模型雖然功能強(qiáng)大, 但是給推斷和學(xué)習(xí)也帶來了很多挑戰(zhàn)。例如, GAN 網(wǎng)絡(luò)的訓(xùn)練過程經(jīng)常是不穩(wěn)定的, 會遇到梯度消失或梯度爆炸等問題, 我們團(tuán)隊最新的成果利用控制論對這一問題進(jìn)行了分析研究, 提出了有效的反饋機(jī)制, 能夠讓 GAN 的訓(xùn)練更平穩(wěn)。此外, 基于可逆變換的流模型往往受限于維數(shù)的約束, 為此, 我們提出了自適應(yīng)數(shù)據(jù)增廣的流模型, 顯著提升這類模型的表達(dá)能力。
?
基于上述介紹, 能夠看出貝葉斯深度學(xué)習(xí)提供了一種強(qiáng)大的建模語言, 將不確定性建模和推斷與深度表示學(xué)習(xí)有機(jī)融合, 其關(guān)鍵挑戰(zhàn)在于推斷和學(xué)習(xí)算法。幸運的是, 近年來, 在算法方面取得了很多突破進(jìn)展 (如上所述)。同時, 也發(fā)展了性能良好的概率編程庫, 支持貝葉斯深度學(xué)習(xí)模型的開發(fā)和部 署。例如, 我們團(tuán)隊研制的「珠算」1) , 是最早的系統(tǒng)支持貝葉斯深度學(xué)習(xí)的開源庫之一。在應(yīng)用方面, 貝葉斯深度學(xué)習(xí)的方法已經(jīng)在時間序列預(yù)測、半監(jiān)督學(xué)習(xí)、無監(jiān)督學(xué)習(xí)、小樣本學(xué)習(xí)、持續(xù)學(xué)習(xí) 等復(fù)雜場景下, 取得良好的效果。
?
3.2.4 單一空間中的計算
?
如圖 6 所示, 我們要在單一的向量空間中, 對來自文本的嵌入向量和來自視聽覺的特征向量進(jìn)行 計算, 存在一定的難度. 因為文本中以符號表示的詞, 經(jīng)嵌入之后變成向量時損失了大量語義, 從視聽覺中提取的特征, 雖然我們盡量獲取更多的語義, 但一般情況多屬底層特征, 語義含量很少。
?
我們將以視覺問答為例介紹這方面的初步嘗試. 在視覺問答中既有圖像又有文本, 需要在單一的向量空間中同時處理, 涉及單一空間模型的使用。以本團(tuán)隊關(guān)于 「篇章級圖文問答」 研究工作為例予以說明 。如圖 9 所示, 根據(jù)給定的圖片, 回答以下問題, 「在大陸地殼下面有多少層 (類型)?」, 除問題以文本形式表示之外, 還有一個與圖片相關(guān)的篇章「板塊運動」。
?
?
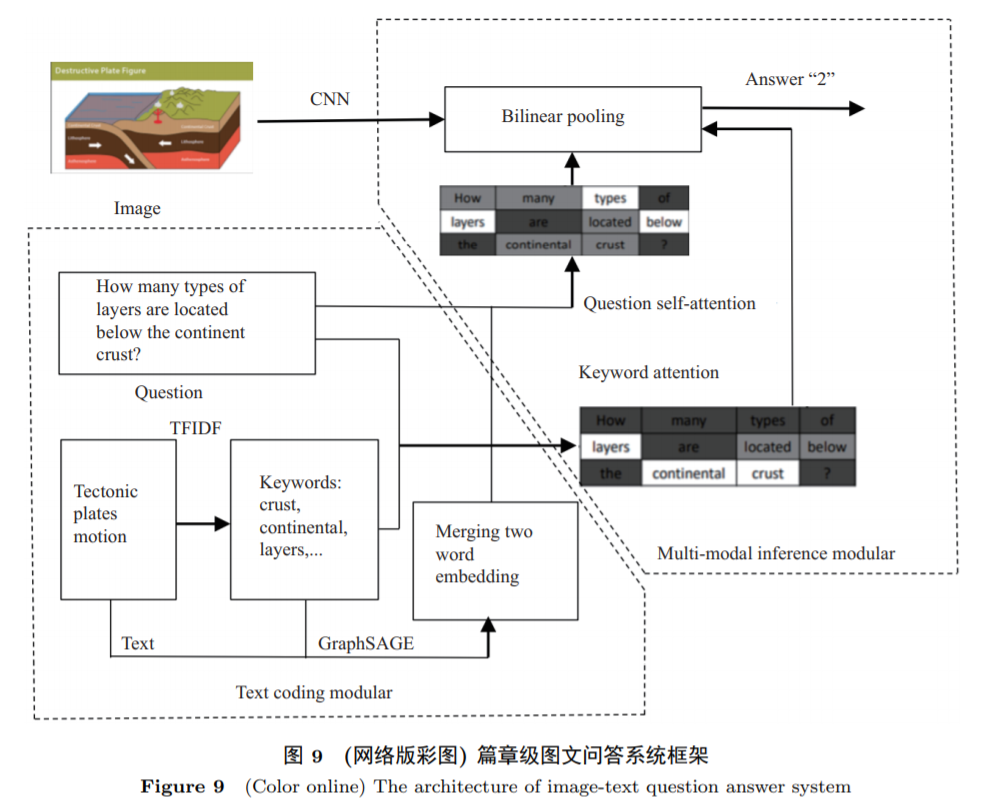
首先通過詞嵌入 (采用 Word2Vec 中的 Skip-gram 策略), 將 「問題」 與 「篇章」 中的以離散符號表示的詞轉(zhuǎn)換為向量. 圖片經(jīng) ResNet 網(wǎng)絡(luò)處理后, 取 res5c 層的特征作為輸出 , 它是一組高維空間的特征向量。然后將「問題」和「篇章」中的詞向量與「圖片」輸出的特征向量做融合, 以預(yù)測「答案」。為了更好地融合, 通過注意機(jī)制, 先找出「問題」 和 「篇章」中的「關(guān)鍵詞」, 這些關(guān)鍵詞能夠更好地反映「問題」的主題 (語義)。再依據(jù)關(guān)鍵詞通過「空間注意機(jī)制」找出圖片中關(guān)鍵區(qū)域的特征, 因為這些特征更符合關(guān)鍵詞向量所表達(dá)的主題, 因此融合效果會更好。這里采用的融合方法是雙線性池化 (multi modal bilinear pooling) 方法。「圖文問答」是選擇題, 備選方案有 「1」, 「2」, 「3」三種, 將融合后的向量與備選方案的向量相比較, 取最接近的一個向量作為輸出, 這里是 「2」 (向量)。
圖文問答目前達(dá)到的水平與人類相比相差很遠(yuǎn), 以「選擇題」為例, 目前達(dá)到的水平只比隨機(jī)猜測略好。
4.總結(jié)
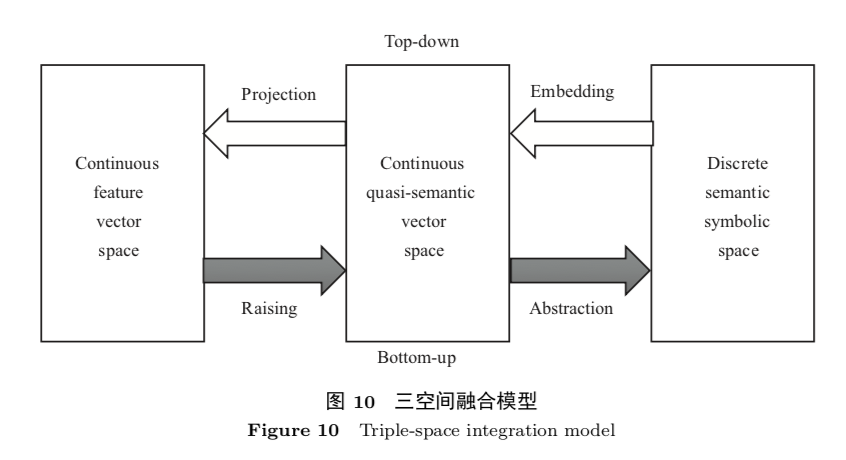
為了實現(xiàn)第三代 AI 的目標(biāo), 我們采用三空間融合的模型,即融合雙空間與單空間兩種模型,如圖 10 所示。雙空間模型采用類腦的工作機(jī)制,如果實現(xiàn)的話,機(jī)器就會像人類大腦的行為一樣,具有可解釋性與魯棒性。此外,當(dāng)把感覺(視覺、聽覺等)信號提升為感知(符號)時, 機(jī)器就具備一定的理解能力,因此也解決了可解釋和魯棒的問題。當(dāng)機(jī)器中的基本概念(符號)可由感知產(chǎn)生時,符號就有了基礎(chǔ) (根基),符號與符號推理就有了內(nèi)在的語義,從根本上解決了機(jī)器行為的可解釋與魯棒性的問題。單空間模型以深度學(xué)習(xí)為基礎(chǔ),存在不可解釋與不魯棒的缺陷,如果經(jīng)過改進(jìn)提高了其可解釋性與魯棒性,就從另外一個方向邁向第三代 AI。
雙空間模型模仿了大腦的工作機(jī)制,但由于我們對大腦的工作機(jī)制了解得很少,這條道路存在某些不確定性,比如,機(jī)器通過與環(huán)境的交互學(xué)習(xí) (強(qiáng)化學(xué)習(xí)) 所建立的「內(nèi)在語義」, 與人類通過感知所獲取的「內(nèi)在語義」是否一樣,機(jī)器是否也能具有意識? 等,目前還不能肯定。盡管存在這些困難,但我們相信機(jī)器只要朝這個方向邁出一步,就會更接近于真正的 AI。單一空間模型是以深度學(xué)習(xí)為基礎(chǔ),優(yōu)點是充分利用計算機(jī)的算力,在一些方面會表現(xiàn)出比人類優(yōu)越的性能。但深度學(xué)習(xí)存在一些根本性的缺點,通過算法的改進(jìn)究竟能得到多大程度的進(jìn)步,也存在不確定性,需要進(jìn)一步探索。但是,我們也相信對于深度學(xué)習(xí)的每一步改進(jìn),都將推動 AI 向前發(fā)展。
考慮以上這些不確定性,為了實現(xiàn)第三代 AI 的目標(biāo),最好的策略是同時沿著這兩條路線前進(jìn),即三空間的融合,如圖 10 所示。這種策略的好處是,既最大限度地借鑒大腦的工作機(jī)制,又充分利用計算機(jī)的算力,二者的結(jié)合,有望建造更加強(qiáng)大的 AI。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4795瀏覽量
102144 -
人工智能
+關(guān)注
關(guān)注
1803文章
48387瀏覽量
244463 -
機(jī)器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8477瀏覽量
133783
原文標(biāo)題:張鈸院士: 邁向第三代人工智能
文章出處:【微信號:AI智勝未來,微信公眾號:AI智勝未來】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
拆了星鏈終端第三代,明白這相控陣天線的請留言!
一談起低軌衛(wèi)星,大家勢必會說起馬斯克的星鏈。一談起相控陣天線,大家還是繞不開馬斯克的星鏈。星鏈給大家打了個樣,一眾企業(yè)在模仿,試圖實現(xiàn)超越和跟隨。最近,拆了一臺第三代星鏈終端。但是,看不懂,完全

第三代半導(dǎo)體器件封裝:挑戰(zhàn)與機(jī)遇并存
一、引言隨著科技的不斷發(fā)展,功率半導(dǎo)體器件在電力電子系統(tǒng)、電動汽車、智能電網(wǎng)、新能源并網(wǎng)等領(lǐng)域發(fā)揮著越來越重要的作用。近年來,第三代寬禁帶功率半導(dǎo)體器件以其獨特的高溫、高頻、高耐壓等特性,逐漸

EE-230:第三代SHARC系列處理器上的代碼疊加
電子發(fā)燒友網(wǎng)站提供《EE-230:第三代SHARC系列處理器上的代碼疊加.pdf》資料免費下載
發(fā)表于 01-08 14:43
?0次下載

第三代半導(dǎo)體廠商加速出海
近年來,在消費電子需求帶動下,加上新能源汽車、數(shù)據(jù)中心、光伏、風(fēng)電、工業(yè)控制等產(chǎn)業(yè)的興起,以碳化硅、氮化鎵為代表的第三代半導(dǎo)體廠商發(fā)展迅速。
廣汽集團(tuán)發(fā)布第三代人形機(jī)器人GoMate,預(yù)計2026年量產(chǎn)
近日,廣汽集團(tuán)震撼發(fā)布了其第三代具身智能人形機(jī)器人新品——GoMate。這款機(jī)器人不僅在技術(shù)上實現(xiàn)了重大突破,更預(yù)示著廣汽集團(tuán)在智能機(jī)器人領(lǐng)域的深遠(yuǎn)布局。 GoMate采用了行業(yè)首創(chuàng)的可變輪足移動
第三代半導(dǎo)體對防震基座需求前景?
隨著科技的發(fā)展,第三代半導(dǎo)體產(chǎn)業(yè)正處于快速擴(kuò)張階段。在全球范圍內(nèi),各國都在加大對第三代半導(dǎo)體的投入,建設(shè)了眾多新的晶圓廠和生產(chǎn)線。如中國,多地都有相關(guān)大型項目規(guī)劃與建設(shè),像蘇州的國家第三代半導(dǎo)體
第三代半導(dǎo)體產(chǎn)業(yè)高速發(fā)展
當(dāng)前,第三代半導(dǎo)體碳化硅(SiC)和氮化鎵(GaN)功率器件產(chǎn)業(yè)高速發(fā)展。其中,新能源汽車市場的快速發(fā)展是第三代半導(dǎo)體技術(shù)推進(jìn)的重要動力之一,新能源汽車需要高效、高密度的功率器件來實現(xiàn)更長的續(xù)航里程和更優(yōu)的能量管理。
第三代寬禁帶半導(dǎo)體:碳化硅和氮化鎵介紹
? 第三代寬禁帶功率半導(dǎo)體在高溫、高頻、高耐壓等方面的優(yōu)勢,且它們在電力電子系統(tǒng)和電動汽車等領(lǐng)域中有著重要應(yīng)用。本文對其進(jìn)行簡單介紹。 以碳化硅(SiC)和氮化鎵(GaN)為代表的寬禁帶化合物半導(dǎo)體
MagicLab開發(fā)第三代人形機(jī)器人,洽談字節(jié)豆包大模型合作
人形機(jī)器人創(chuàng)業(yè)公司MagicLab近日宣布,正在積極開發(fā)第三代人形機(jī)器人產(chǎn)品,并聚焦于其實地應(yīng)用與落地。據(jù)悉,這款機(jī)器人已在某家電工廠的流水線上進(jìn)行測試,旨在驗證其在工業(yè)生產(chǎn)環(huán)境中的作業(yè)能力。
晶科能源第三代Tiger Neo系列產(chǎn)品的問題解答
近期發(fā)布了采用N型TOPCon技術(shù)的第三代Tiger Neo系列產(chǎn)品后, 關(guān)于這款極具競爭力的產(chǎn)品,小編挑選了大家最為關(guān)心的10個問題進(jìn)行解答。
芯科科技第三代無線開發(fā)平臺助力物聯(lián)網(wǎng)設(shè)備升級
和首席技術(shù)官DanielCooley探討了人工智能(AI)如何推動物聯(lián)網(wǎng)(IoT)領(lǐng)域的變革,同時詳細(xì)介紹了芯科科技不斷發(fā)展的第二代無線開發(fā)平臺所取得的持續(xù)成功以及即將推出的第三代無線開發(fā)平臺。
高通第三代驍龍8移動平臺解鎖沉浸式游戲體驗
隨著手游市場不斷攀升,玩家需求不斷增加,也讓智能手機(jī)支持的游戲功能越來越豐富和多樣化。作為眾多游戲手機(jī)、性能旗艦的首選平臺,第三代驍龍8移動平臺利用CPU、GPU、NPU的異構(gòu)計算能力,以卓越能效
第三代半導(dǎo)體的優(yōu)勢和應(yīng)用
隨著科技的發(fā)展,半導(dǎo)體技術(shù)經(jīng)歷了多次變革,而第三代半導(dǎo)體材料的出現(xiàn),正在深刻改變我們的日常生活和工業(yè)應(yīng)用。
在第三代C2000器件上實現(xiàn)EEPROM的模擬操作
電子發(fā)燒友網(wǎng)站提供《在第三代C2000器件上實現(xiàn)EEPROM的模擬操作.pdf》資料免費下載
發(fā)表于 09-09 10:59
?0次下載
智平方打通具身智能核心痛點:將AGI拓展到物理世界
,中國科學(xué)院院士、清華大學(xué)人工智能研究院名譽(yù)院長張鈸,百川智能創(chuàng)始人兼CEO王小川,易顯智能創(chuàng)始





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論